博途pc和pg接口怎么设置
大家好,我是带你踩坑带你飞的天然大流。今天我们啊来讲一个波图, 呃仿真的时候啊,需要做到一个设置啊, pgpc 的一个事啊,呃我们在通常啊,就是说在进行仿真的时候呢,我们需要连接我们的 prcc 啊的仿真,呃然后呢?呃我们经常像我们在这种啊, 先给这个仿真运行起来啊,在连接这个 plcc 的时候呢,有时候会发现连接不上啊啊我给大家演示一下。 呃我们到播图啊,然后呢点击下载我们这块呢 prc 啊,幺五幺六 杠三。呃然后呢我们 psc 模仿真的呢也是啊,这个幺五零零啊,这个零零对应的是没问题的对吧? 然后我们再进行下载的时候呢,他需要去选择一个蹲口啊,在蹲口里面选择我们去搜索我们的 plc, 呃我们看一下啊 was that much。 哎好像能连上是吧。啊从这我们去搜一下啊, 这块显示叉一啊,也就是第一个叉槽,呃我们去搜一下, 好的,看我们正常情况下是从这块能搜到的对吧?呃能搜到我们的 prcc 啊,呃就是说, 呃 pgpc 我这块是已经设置了啊,如果没设置好的话会是什么样情况呢?我们打开控制面板啊,呃在这个位置呢,我们去搜索 pg pg 啊, pgpc 有这样的一个设置选项,我们进来啊,打开这样的一个设置 pgpc 接口的这样的一个图啊,嗯这块里面呢,它使得全是属于你的, 呃网口啊,是网口, 呃通常我们这种啊,这个 real tech 啊 pici 这是属于我们真实的路由器啊,自己的路由器它的一个网口, 呃他这块默认呢应该是属于在这个位置,然后访问点程序。呃他这块是设置好的啊,我们看 两种好不透之后呢他其实应该有这些东西, s 七啊,卖啊, stap 七啊,包括这些东西。 呃他正正常情况下他使的是这种真实的端口啊,我们可以去这回呢切回到国土里面,我们再去搜一下,看能不能搜到。哎,能搜到吗?呃 而且呢基本都是仿真的墩口, 我们用这个弄的比较多一些啊,他是属于你看他写的是西门子的 psc 母的一个仿真端口, 就是当你在发现你的 plc 连不上的时候,再回来 就是发现你的 psc 连这个 psc 幕的时候,他有时候会连不上啊,有时候你是在做其他的一些网络连接的时候呢,呃他可能会去修改这个 pgpc 的一些动作,然后 有些软件会自动的修改。呃然后会导致的 psc 连接 psc 们的连接不上啊,我们到时候去在这块去手动的修改一下。 呃就在这块呢,呃应用程序访问点,在这个下拉里面选择这个啊, s 七香外音,然后在这一块呢去选择。呃西门子 prcc 啊,呃 what to we we are we what to what what to 什么啊? what to type 的这个啊,最后一下 他一个显示已激活的。呃然后写完之后呢我们在这里搜索正常人就能搜到你所想要的啊,这个就是 plc, 然后呢在这块进行下载, 然后再进行覆盖就能正常的去执行。 嗯这块呢我们还是需要把 poc 打开,把 pocc 打开啊,他这块给我断电了 啊。后面呢就是属于我们的正常操作啊,就是正常下载了不好的啊,这就是关于 plcc 目的一个介绍啊,路径是控制面板啊,右右边这个 搜索 pgpc 啊,打开啊,就这几个部长,然后设置访问点啊,设置你的这个接口。好的,在这里谢谢大家。

粉丝1001获赞4907
相关视频
 01:41查看AI文稿AI文稿
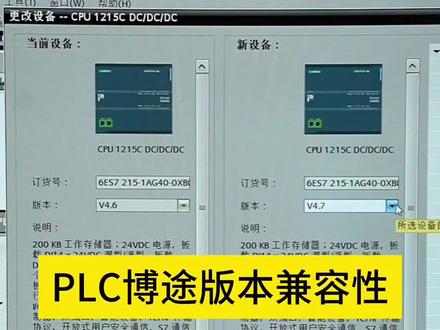
01:41查看AI文稿AI文稿西门子幺二零零 plc 下载的时候提示固件版本不兼容,导致程序下载不进去,这种情况该如何处理呢?其实这是薄图软件的固件版本与 plc 的 固件版本不一致导致的, 现在给同学们演示下解决方法。首先查看当前的固件版本,点击在线访问设备,选择一下 p g pc 接口, 点击开始搜索,找到当前连接的 plc, 点击显示找到左侧项目数,点击在线和诊断常规模块,可以看到固件版本为 v 四点三点一,记住这个版本号。 接着找到祖泰的 plc, 双击 plc 图标常规更改固件版本, 可以看到当前 plc 固件是 v 四点六,与在线 plc 版本 v 四点三点一不一致,导致程序无法下载,我们手动将固件版本改为 v 四点三,然后点击确认更改, 改好之后点击程序翻译,确认没有错误,继续点击下载程序装载组态,完成后启动模块,直至完成程序的下载。点开程序后选择程序监控左侧要保证全部绿灯。 至此,完成固件版本的更改,同学们学会了吗?希望这个视频对你有所帮助。
353秒懂PLC 05:05查看AI文稿AI文稿
05:05查看AI文稿AI文稿安装薄度之前,我们先检查一下我们电脑的这个系统,那么我们找到我们的这个系统规格,晕石专业版,版本号为 r h 二,这个版本的话呢,经过测试,装晕这个薄度微视器是没有任何问题的。 首先我们将这个薄涂威士忌的压缩包,我们把它解压出来,解压之后呢,我们得到一个文件夹,我们双击打开,双击进入,首先安装这个主程序, 第一个薄涂主程序,那我们选中它,右击装载, 找到这个 star, 让我们右击以管理员身份运行,这个时候呢就会进入薄涂的安装程序,然后我们点下一步,选择下一步, 那么这个安装路径的话呢,可以换在其他的盘里边,如果你的 c 盘够大的话呢,可以默认到 c 盘,点下一步,同意这两个协议,然后呢单机下一步,下一步, 然后呢选择打勾,下一步,选择安装好,那么呢大概呢会花一段时间来进行这个薄涂的安装,安装时间大概需要半个小时,这个需要耐心等待 好了,那么提示设置已完成,那么有一个叫是否重启计算机,我们点否点关闭,那这个时候呢,我们将这个文件夹缩小,需要设置我们的这个 注册表,我们选择 windows 加二,在里面输 r e g e d i t, 我 们点击确定,找到注册表。这个第三项 keylocalormessage 展开,找到我们的这个 sum, 找到这一个第三项 展开,找到我们的这个 ctrl, 然后往下拉,找到这个深色 manager, 这个 拉开,在这里面的目录里面找到这个这一项,编辑 file relim, 右击将它删除,单机确定关掉它。然后呢再次找到我们的这个电脑,找到我们的这一个软件的目录,找到这个软件,找到文件夹, 这个时候呢我们主程序已经安装完成,接下来我们需要安装我们的仿真这个 p l c s i m 双击,然后呢我们选择 star, 右击以管理员视频运行,那么此时呢我们要安装它的仿真插件, 那么此时呢,我们选择下一步,选择下一步,同样目录选择放在 c 盘,选择下一步接受,接受,然后呢下一步接受,然后呢选择下一步, 选择安装,此时呢开始安装我们的这个仿真插件, 那么提示设置已成功完成,提示是否重启计算机,我们点否关闭退出文件夹,那我们再次找到我们的这个路径, 那么接下来我们要进行这个激活,找到我们这个激活工具,右击,以管理员身份运行,那这个时候呢,我们首先要找到我们的这个薄图,找到 t i a 坡度,双击,找到微视器,然后呢我们 勾选,选择安装长密钥,那么提示所有,接下来我们往下拉,激活我们的仿真, 找到这个 plcsm, 找到微视器,然后呢打勾,然后呢我们进行安装长密钥。好,那么此时呢就破解完成,我们需要将这个关掉,关掉,然后呢此时我们就将这个薄图安装完成。
884鱼哥234 00:24查看AI文稿AI文稿
00:24查看AI文稿AI文稿sata 调试第一步,新建项目解析 ip p g a pc 设置首先打开 sata 软件,创建空白项目并保存,接着将调试网线插入 c u 三二零的 x 幺二七调试网口,同时确保电脑本地 ip 与 c 又处于同一网段。之后进入软件选项,打开 p g a pc 设置,将 s c 源栏绑定到对应的一套网卡,这样才能保证通讯正常。连接驱动。
364工业电气安全课堂 07:55查看AI文稿AI文稿
07:55查看AI文稿AI文稿各位朋友们大家好,我是王俊杰,今天我来讲解用 ai 去编辑西门子薄图 plc 程序和触摸屏 hmi 界面的操作原理。首先呢,我来用一个案例给大家去演示一下, 我来先让他去阅读文件夹中的内容,然后再去写西门子 plc 程序。大家看好,左边这个文件夹是我自己研发的 ai 知识库,这个知识库呢,包括我 十年来的工作经验总结出来的案例模板都在这里边,我把它集成到这个知识库里边,让 ai 先去学习一下这个知识库,然后再去编程。我们看这个程序的要求是什么? 一个开关控制一盏灯,这个灯呢是能够变颜色的,比如说冷光灯,暖光灯和日光灯,他们之间能够切换,这个呢也是我们家里边这个三色灯的一个案例,非常的常见。好,首先呢,我们看啊,比如说我们打开开关, 则冷光灯亮,如果我们关闭开关的话,那灯肯定灭了。如果我们在十五秒内再次打开开关, 哎,这个时候呢,就切换为暖光灯继续关灯。如果在十五秒内呢,再一次打开开关,则切换为日光灯,也就是说 先是冷光灯,再是暖光灯,再是日光灯,之后呢,就这样循环着转,如果我们每次关灯超过了十五秒,那再次开灯,则启动为冷光灯。我们把这个需求啊抛给 ai 大家看啊,现在 ai 就 开始按照我们这个要求在思考了,他先按照这个工作区的阅读文件去读了,然后才开始去写程序。 好,我们看啊,这个时候 ai 就 开始工作了,他现在正在去写程序。 好,大家看啊,他提示了马上会弹一个授权框,然后让我去点击试,他首次去连接这个薄图的 opens。 好, 我们点击运行。 好,大家看啊,现在已经弹出了一个小黑框,这个呢是一个生成器,这 ai 所编写出来的薄图生成器。 好,它现在是想调用这个薄图的接口,我们点击确定,我们授权它一下,我开始添加设备导入程序,导入变量,导入 db 块以及主函数和一开始的一个 o b 块。 好,编辑成功,零错误,零警告。好,我们看一下啊,这个 ai 现在应该是把这个程序已经写完了。 ok, 他 说程序已经写完了,工程路径在 d 盘,然后七幺幺,这个文件,大家看啊,这个就是这个文件尾号是七幺幺,对吧?我们双击一下, 看这个程序是不是正确的。好,这个程序出来了,然后我们先把这个 o b 块打开,看一下这个程序。 ok, 大家看啊,这个就是 as 五生成出来的程序了。好,首先呢,我们先点击一下翻译, 看这个程序从语法上对不对。好,编辑结果是零错误,零警告。然后呢,我们再去模拟一下这个程序,看看 ai 写出来的程序啊,到底对不对。这个程序呢,就是纯 ai 去编辑的启动仿真,我们点击确定。 好,现在这个仿真软件正在打开中。 ok, 我 们点击连接, 为了方便呢,我给他去建立一个列表,比如说我把这个启动按钮按零点零给它写进去, 也就说什么呢,我们看啊,这是冷光灯,暖光灯和日光灯,我们按下启动按钮,我们先把这个启动按钮置一看,一下是一个什么样的现象。好,冷光灯启动,对吧?这是我们第一次打开按钮,则冷光灯启动好,然后我们关闭按钮, 哎,冷光灯灭,然后我们下一次呢,再一次打开按钮, 哎,暖光灯启动,对吧?你看,暖光灯亮了,然后我们再一次关闭按钮, 哎,之后呢,我们再一次打开按钮, 哎,日光灯又亮了,对吧?也就说第一次按冷光灯亮,第二次按暖光灯,第三次日光灯,那下一次呢,就又循环到冷光灯了。也就是说,我们现在这个 ai 呢,已经完全可以写西门子薄图 plc 的 程序了。 其实这个程序呢,还是比较简单的,我在内部课呢,会给大家讲解西门子的轴运动如何用 ai 去编写,以及 pid 通讯,还有 modbus 通讯等等更复杂的案例 包括寄存器复制法等等,这些状态机的程序我都会给大家去讲解的。这个呢,都在我的这个案例库。 好,我们来看一下这个 a h 编辑 p r c 程序啊,它其实是有原理的。首先呢,第一步就是我把十年来的工程经验总结成了 这个 xml 格式,然后训练给了 ai, ai 学会了我的成熟案例和编程风格,就有了一个编程的根据。这一步呢,其实非常的关键,其实 ai 啊,就像一个聪明的大脑,有了正确的数据,就能够举一反三,写出正确的程序。这个呢是第一步。 第二步呢,是我把 plc 工程需求精准化地表达给了 ai, 哎,然后它就能快速地理解整个项目的过程,然后自己去编程。大家看啊,我一开始给的它这个提示词,其实也是 非常的全面,对吧?我让他先读,读完工程之后呢,我把这个提示词给他,他就能够写出这个程序来,而且写出来程序呢是正确的,我们也是有目共睹,用软件给他去模拟了一遍是正确的。 第三点呢,就是薄图的 opens 接口,是连接 ai 和 plc 程序的桥梁, ai 呢,它是通过调用薄图的 opens 接口, 把程序直接导入到薄图的编程软件中的,不用你去手动敲写一行代码。我们在这个 plc 编程的过程中呢,没有去敲写一行代码, ai 就 快速的写出来了,好想系统学习用 ai 去编辑西门子薄图 plc 程序,和 ai 去编辑西门子触摸屏的 hmi 界面。一定要看我这个视频下方的置顶评论,报名我的内部课。我的内部课呢,就讲解了如何去用 ai 去编辑 plc 程序的方法,而其中呢,就包括了 非常多的案例,比如说 modbus 通讯、呃轴运动去控制四伏电机, 那步进电机的一些方法都是用 ai 去纯编写的。然后呢,还有 pid 通讯、状态机 寄存器复制法等等,这些主流的市面上非常常用的东西,都用 ai 能够编写出来,价值巨大。好,今天的分享啊,就到这,大家一定要去我这个视频下方置顶的评论去看一看,学习我的内部课。 ok, 这个视频啊,就到这,再见!
344俊杰工控PLC 03:05查看AI文稿AI文稿
03:05查看AI文稿AI文稿安装了薄涂高级仿真,却不知道怎么用。首先咱们打开这个 plcsim advanced v 六点零高级仿真。然后咱们选择 tcp ipsingle adapter, 就是 单个,是配器的意思,这里要保持它默认为本地,不用修改它。 这里要写一个实体名称,就是新建一个虚拟 plc 的 名称,名称可以自行定义,但不能为空。比如填写一五一五比二 p n, 然后给虚拟 plc 填写一个 ip 地址,幺九二点幺六八点零点幺,下面再填写默认的字网野码,二五五点二五五点二五五点零, 这里的网关咱们可以不用填写。然后咱们点击 start, 开始启动虚拟 plc 仿真,咱们看看要生成一个什么呢?再生成咱们刚刚配置了这个虚拟的 plc, 这里的黄色灯表示虚拟 plc 现在是在 stop 状态,如果是软状态会变绿色。 到这里虚拟 plc 就 配置好了。接下来咱们要做什么呢?需要把电脑的网络连接改为咱们的这个 ip 铜网段,才能进行下载仿真。 现在打开电脑的网络连接,找到这个网卡名称为 simmons plc, sim 开头的,为什么有些人下载不进去,因为这个名称没有找对。现在点击属性,打开 internet 协议版本试 在这里设定一个固定的 ip 地址,幺九二点幺六八点零点二四八。这个固定 ip 地址要跟刚才虚拟 plc 要同网段,但不能设定一样的 ip, 不 能设定为幺九二点幺六八点零点幺,指望野马咱们默认一下,二五五点二五五点二五五点零, 网关咱们不用设定,点击确定,再点击确定。现在打开薄图,首先要把这个项目建好,这里的 cpu 我 提前建好了,为一五一五到二 p n d plc 这个 ip 地址咱们看一下,四幺九二点幺六八点零点幺。在下载之前 咱们最关键的一步操作,点击最左上面这里的项目一名称,右击这个属性,点击一下这个保护,在这里打勾,支持在快翻译过程中进行仿真,只有打勾了,在仿真的时候才能支持快翻译,这一步是非常重要的, 咱们点击确定,然后咱们点击翻译,翻译没有错误,现在进行下载,这里的接口选择 plc sim 的 这个就是咱们刚才配置的这个虚拟网卡,这里如果记不住是哪个插口,直接选,尝试所有接口,点击开始搜索,找到这个 plc 设备,点击下载, 下载完成后,现在转到在线模式,咱们来认证一下是不是咱们之前配置好的虚拟 plc。 左边的是高级仿真软件,这里是黄色灯,是 stop 状态,咱们在薄图这里点击启动 cpu, 看看虚拟 plc 会不会变绿色灯,点击后虚拟 plc 在 黄色灯状态变为绿灯乱状态,说明仿真的配置是完全正确的。后面咱们可以仿真薄涂里面的程序和可以监控一些变亮状态了,欢迎大家点赞评论和转发,谢谢大家。
172工控人阿良 05:07查看AI文稿AI文稿
05:07查看AI文稿AI文稿嗨,大家好,我是正顶 p l c 的 刘老师,这节课我们来讲一下薄图全新的软件 vr 十一如何进行安装。首先找到软件安装包,我们右键选择打开方式,选择里面的 windows 资源管理器,等待打开之后找到里面的 start, 我 们双击把它给打开, 等待打开之后,默认语言界面点击下一步,在当前里面也是点击下一步。 软件安装,这个也不用管,也是下一步。紧接着在这个条款里面选择接受之后点击下一步, 在更改的防火墙属性信息里面也是接受下一步。最后确认一下没问题,点击安装,这个时候我们只需要耐心等待就可以。 hey, hey, it's a wild wild west when you feel i'm still inside the wild wild wild west please tell me well ah now i hold that sunday, i'm almost a stupid ass it's a wild west。 等待软件安装完毕之后,我们根据软件的提示,我们直接去重启电脑, 等待重启完电脑之后,可以看到电脑上面已经出现了好几个关于薄图 v 二十一的图标,这里面不管你出现几个,只要出现了 t i a v 十一,这个时候就代表是我们的软件已经安装好了。
 05:12查看AI文稿AI文稿
05:12查看AI文稿AI文稿这种组合模式在现场非常常见,如果全部用幺五零零系列的 r o 模块车造价会比较高。大家好,这节课咱们讲一下息明智。幺五零零怎样与接口模块进行 dp 通讯。大家看,现在这个状态是我刚进行硬件 连接之后的一个状态,没有下载程序,它的这个指示灯也在刊,说是没有进行软件助态及下装的一个状态。 好,咱们从薄图里边进行了软件注态,并下装到 cpu 里边之后,这个状态指示灯都已经正常了。咱们来看一下,这是一个幺五零零的 cpu, 这是一个幺五零零的 幺五十二杠五的 dp 通讯模块,咱们来看一下,它是用了 dp 通讯头插到上面之后,就可以和接口模块进行通讯了。这种组合模式在现场非常常见,如果全部用幺五零零的 cpu, 用 二百 s p 的 接口模块,这个造价会相率较低一些,因为二百 s p 的 这个 r o 模块不光点数要多,而且这个单个模块是比较便宜的。咱们来看一下这个实操演示啊。然后 dp 的 另一侧是接的这个幺五五杠六 dp 的 接口模块, 这个拨马开关,现在这个位置是拨到了这个三的这个位置,这是一个低压模块,这一个 du 模块,低压模块上接了一个按钮,咱们来实抄看一下,我点这个按钮, 通过 cpu 里边的程序,这个 dq 模块上面的零点零、零点一、零点二,这三个灯会交替闪烁,循环往复,看到没有?好,我点听着好,通过程序,然后听着下来,那我再点启动 看没有,这三盏灯又交替闪烁,哦,这是在幺五零零里边做的程序,已经能成功和接口模块进行了通讯。接下来咱们看软件里边是怎样进行主态的。好,咱们看 薄图里边是怎样进行 d p 通讯主态的。首先打开薄图软件,好,咱们先新建了一个项目,是幺五零零接口模块, d p 通讯。好,接下来咱们添加新设备,点击添加新设备,双击 好,找到我们的 c p u 幺五幺三杠一 p n。 好, 再一个找到相应的病符号点,确定之后会有了一个 幺五幺三的一个 c p u, 咱们接下来打到设备视图这边,添加咱们的 d p 通讯模块是幺五十二杠五的,在这边找幺五十二杠五 c p 好, 找到相应的定位号。王德托托到这一个二号槽位场边,好,紧接的幺五零零这边的模块就已经逐探完毕,接下来 咱们看一下它的 d p 地址是二,这是对的传输率一点五,这是没问题的。好,接下来咱们打到网络试图,好,紧接着要添加这一个重赞,是 d p 接口模块,咱们在这里添加它的这个接口模块的这个订货号是远程,是分布式 r o, 是 分布式 r o, 这一块 e t 二百 sp 接口模块,选 pro 飞霸式这一个 六 b 六零一,咱们对好这个电话号,然后点击,然后选中他往这拖,拖过来之后呢?然后咱们双击他的 d p 接口,看一下他的 d p 地址是三,和咱们的波满和宽对应号,然后这个也是一点五传输率。紧接着 咱们要主态他的哈物模块,根据咱们的硬件配置来添加,先选 d i, 找到相应电话号,然后再从 d q 里边找到相应电话号,依次按到顺序添加啊,这一个 d i 是 用的白色底座,是供电的,这个 d q 是 用的灰色底座,是不需要过继电源,这样就已经添加了硬件模块。好,接下来打到网络仕图,在这儿 选中这个 d p 口,然后往上划线,划到这个接口模块的 d p 口,这儿就连地上了这个 d p 通讯线。 然后咱们选重点翻译啊,硬件素材是没有错误的。紧接着咱们在 obe 里边简单做一个三盏灯交替闪烁的一个程序哈,这个比较常见,我演示同时应用的是一键启停,这个里边比较简单啊,有需要这个程序的可以给我留言。 好,紧接了,咱们整体翻译没有错误,下载装载完成好再先看一下,看到没有这个状态,指示灯现在都正常了,然后看的山胆灯也已经交替闪烁, 咱们来看一下,逻辑里边是 q, 零点零,零点一,零点二,再交替接通,和这个硬件指示灯是一样的,咱们点停止好扇胆灯同时不亮,逻辑里边也同时断开点启动。 好,这就是关于幺五零零余接口模块进行 d p 通讯的一个应用型,比较广的一个演示。值得注意的就是咱们的这两个 d p 头是要打到 on 的 位置 啊,如果中间再加 d p 通讯的话,中间呢,是要打到奥虎这个位置。好,其他的有不了解的欢迎评论区留言,有有想学习 plc d 四 s 以及智能化仪表电功电路的同学欢迎交流学习。
144工控客官 04:45查看AI文稿AI文稿
04:45查看AI文稿AI文稿大家好,从今天开始,理工就带大家玩转西门子 plc。 在 我们编辑 plc 程序的时候,往往难的不是编辑,而是调试,通常会因为某个通讯问题找问题找半天。理工刚开始学习 plc 的 时候,这种事情也经常会遇到, 所以我们从通讯讲起。这一期将教会大家在不同项目中两台一二零零 plc 的 s 七通信。首先点击添加设备,添加一个主站 plc, 这里根据实际型号来选择,如果只是进行仿真来模拟型号自定义就好。 接着我们右击 plc, 右击属性,对 cpu 进行一些必要设置。点击 profini 的 接口,点击添加芯子网,修改 plc 的 ip 地址。两台 plc 要进行通讯,必须在同一个网段才能实现。修改好 ip 地址后,点击系统和时钟存储器, 把这两个都勾选上,等会儿写 s 七通讯会用到勾选连接机制中的允许来自远程对象的 pet 访问。点击网络,试图点击连接, 选择 s 七连接,建立 s 七通讯,右击选择添加新连接。需要注意一点的是,这边的 id 不要和另一台从站 p l c 重复。点击添加,点击蓝色的 s 七连接,在这个红色的地方填入从站 p l c 的 ip 地址, 打开程序块这个文件夹,点击添加新块,添加一个通讯 d b 数据块,用来存储扑特发送的数据和 get 接受的数据。 我们先建立 put 发送的数据存储区,这里数据类型我们改成整数数组类型,当然其他类型也可以,不过一般 plc 之间都是发整数数据,设置数组为十个整数, 再建立 get 发送的数据存储区,同样的也是建立十个整数的数组,主播这边偷个懒,直接复制粘贴,右击 d b 快, 点击属性,取消优化的快访问。这一步是让 d b 快 里的数据有偏移量,因为写通讯程序要用到绝对寻址。 翻译一下,翻译完就可以看到 db 快 里数据的偏移量了。接着我们来到从站 p l c, 进行和刚才主站 p l c 一 致的操作, cpu 基础设置,建立 s 七连接,建立 db 数据快。唯一需要注意的就是从站的 id 设置不要和主站相同, 这里因为操作一致,主播就快进一下哈。 ok, 前面的主从站基础设置都已完成,现在开始写程序了。回到主站,在右边指令选项通讯这块 有一个 s 七通信,点开点击一下就可以调用该通讯指令了。我们需要创建一个 put 和 get 指令, put 指令负责主站向从站发送数据, get 指令负责主站从从站接受数据。 r e q 是 接通喜能, 我们使用 m 零点零十赫兹的频率接通,也就是让它不断地更新接通,实时更新存储区发送和接收到的数据。这里的 id 是 指发送到从站端哪里,需要绝对寻址,大家可以跟着学习一下绝对寻址的格式。 s d 是 指从本机的哪里发送数据,同样的也需要绝对寻址。 接下来对 get 指令进行编辑, get 指令负责主站接受从站发来的数据,接通频率依旧用 m 零点零。这里的 add 是 指接受从站从哪发来的数据。二、 d 是 指接收到的数据存储到本机哪里。点击这个蓝色的组态按钮, 设置一下扑特指令的伙伴端,点击为指定,同样的设置一下 get 指令的伙伴端主站的 s 七通讯程序到这就全部结束了。我们来到从站,添加一个 get 和扑特指令,给两个指令 r e q 端都给一个 m 零点零 十赫兹频率接通。这里的 id 是 指接收主站端从哪发来的, id 是 指接收到的数据存储到本机哪里, 而这里的 adder 是 指 sd, 则是指从本机哪里发送数据。点击两个指令蓝色的组态按钮,选择伙伴为未指定进行通讯分配。现在主从两台 plc 程序已经编辑完成,将它们依次下载并转至在线。我们在主站的发送数据块里发几组数测试 来到从站,可以看到从站数据块已经接收到这几组数据,再从从站发几组数据切到主站,可以看到也是成功接收到从站发送的几组数据了。这期的教学就到此结束,拜拜!
2970奋斗的李工 02:41查看AI文稿AI文稿
02:41查看AI文稿AI文稿来看一下 faqry i o 和薄图的联合仿真。首先打开 faqry i o 虚拟工厂,找到它自带的场景,我们选择最基础的 from a to b, 就是 从 a 到 b, 先认识一下这个场景,传感器只有一个光电开关,执行器只有一个输送带,还有一个 far cry i o 自带传感器热凝,这个传感器是手动点击启动 far cry i o 运行的。接下来我们打开薄图, 因为是联合仿真,没有实物,这里就需要用到自带薄图和 far cry i o 仿真通讯程序的模板, 模板是 v 十五版本的,我用的是薄图 v 十七去打开它,所以这里需要升级,让它在这升级。我们来看发瑞 i o, 选择驱动来配置 cpu, 选择西门子 s 七 plc 仿真,提示 plc 仿真没有运行,看这边输入有两个,一个是 ram, 另一个是光电传感器, 输出是输送带运行。回到薄图,打开项目视图, 直接看程序快,这一个就是 plc 仿真和发出去收通讯的 fc 快 程序,这个通讯 fc 快 已经封装好的,直接调用。这个的功能就是让 plc 仿真和发出 i o 通信的一个功能。 从 a 到 b 的 程序这里我已经做好了,就是一个简单的程序,让它启动仿真, 然后这里要把仿真切换到热模式,这里仿真启动了,再看 effectio 场景,这个勾表示已经连接成功了, 开始联合仿真,分一下屏转至在线,直接看第二段程序,这个光电开关的传感器如果没有什么挡住 它就是接通的,有挡住它就是断开的,现在是没什么挡住 i 零点零是接通的,我按一下这个 radiometer, 这里就接通了输送带开始运行,箱子踏到这里挡住传感器, i 零点零断开输送带就停止运行,这个程序就跑完了。
98走去宇宙摘星星 04:01查看AI文稿AI文稿
04:01查看AI文稿AI文稿手把手带你调戏铲陷入坑!自动化控制其因系主播看到网上有很多小伙伴想学自动化,但是又没有门道,主播对自动化比较了解,欧姆龙、西门子、惠川都比较擅长,而且手下正好有一套设备。从以后开始,我会从运动控制,从细框架、 网络通信、海康细节机器人等几个角度给大家讲解,直到大家学会为止。有的小伙伴觉得主播讲的太难了,还有的小伙伴连安装包都没有,也不会安装薄图,所以这一期主播就来教大家如何安装薄图,现在我们来展示这个薄图 v 一 五点一的安装, 我们来看这个薄图软件,如果说需要的话可以看看评论区。当我们下载完这一个薄图 v 一 五点一的的压缩包之后,我们来到这个下载的位置, 给它进行一个解压缩,解压之后的文件就是这一个薄图 v 一 五点一,我们双击打开,一共有这么四个文件。先来第一步进行薄图 v 一 五点一本质的安装,点开这个 set up 右键这一个薄图的安装文件 以管理员身份运行选项,下一步 这个地方可以更改一下我们的软件安装目录,我们直接进行下一步,因为我已经安装了这一个薄图 v e 五点一,所以就不能进行二次安装了,这个地方直接点否?当然了,没有安装的同学呢, 直接按照提示进行下一步来完成这个安装。 当安装完了薄图 v e 五点 e 本质之后呢,要安装这个仿真软件,这个是我们西门子进行仿真得时候所用到的一个软件,叫做 plc s i m 一 样的右键以管理员身份运行, 是 这里也可以更改你的安装目录, 现在它会进行一个这个压缩包的解压缩,当然了这个地方我也是已经安装过了,所以我就不进行二次安装。 当我们安装完这一个 plc s i m 之后呢,我们要来安装这一个授权软件,因为我们的薄图它是没有授权密钥的, 我们要解压这一个文件,解压这个文件,逮到这个文件我们来右键以管理员身份运行。 这个地方呢我们全选,这个时候我们选择安装这个长密钥,我们要全选点这个 o, 好, 这样就已经完成了, 现在我们就可以打开进行使用了, 我们可以直接创建一个新的项目, 我们组它一个一千两百试试, 可以看到我们这边的功能都是完全正常的,制作不易,喜欢的小伙伴点点关注,点点赞呀!
1501自动化PLC卢工 05:40查看AI文稿AI文稿
05:40查看AI文稿AI文稿嗯,我们来看一个视频啊,这个视频呢是我们用西门子博图 v 幺七做的一个组态,西门子 三百的一个 cpu, 也就是说我们的西门子博图呢,不光是可以组态西门子幺二零零、西门子幺五零零, 西门子三百的 cpu 呢,我们也可以在我们这个薄图的编程软件里边组态,然后输入点输出点模拟量,模拟量输出都可以做,然后呢你其实的功能就基本上就跟幺二零零一样啊,然后组态完了之后呢,它会有默认的有一个 m a n o b e 主程序, 在我们的主程序里边写一个最简单的起保停程序,那么我们就可以把它打到监控,打到仿真, 打到监控,然后我们就可以看到我们这个程序就可以正常运行,然后右击,然后把我们的启动按钮给个一,然后松开启动按钮松开,那么我们这个起保停就保持住了, m 十点二就是导通为一, 然后我们按下 m 十点一,那么我们这个起保停 m 十点二就断开了,然后这就是一个简单的起保停程序。 如何添加呢?就是说如果你新添加的一个新建的一个西门子博图的一个项目,然后呢我们就可以在这个位置,呃,添加新设备,双击双击添加新设备,找到我们这个 s 七三百,找到 s 七三百,找到我们的 cpu, 呃,我们这个 cpu 是, 呃,三幺七杠二,三幺七杠二,我们就添加一个三幺七杠二,一样的啊,三幺七杠二 p n, 三幺七杠二 p n, 三幺七杠二 p n 这个的,然后我们随便选一个啊,随便选一个,然后点确定 点,确定完了之后就是说我在我这个的基础上再添加一个 cpu, 再添加个 cpu, 然后呢我们来看一下这个 cpu 的 这个组态,双击打开我们第一个这个双 cpu 的 组态呢,他这个呃主要是西门子组态呢,我们主要是看他的定位号, 在这个常规这里可以看到我们这个呃目录,目录信息就是我们这个 cpu 的 订货号,那么我们看这个也可以看到这是个二一 k 幺四, 二一 k 幺四,这个呢也是二一 k 幺四,那么我们看这个的组态,呃,看它这个 di 输入, di 输入呢是多少呢?我们选中它之后,我们看它这个项目目录,我们可以复制一下, 复制完了之后再进入我们刚刚新添加的这个,我们把这个鼠标点到这里,然后在我们右侧的硬件目录这里,这个如果你没有,如果你没有的话你就可以点开它,如果你没有的话就点开它,它可以收缩的。 然后我们把刚才复制的这个呃定位号粘贴到这里,粘贴到这里之后呢直接点回车,点回车它就出来。我们现在这个定位号就是说 di 点十六位的输入,我们可以选中它拖过来,拖到我们这个想要添加的位置,它会默认分配的它的输入,输入点我们可以看到,我们把它放大一点,就可以看到它是 i 零点零到 i 一 点七十六个点,那么一样的道理,我也可以添加我的 d o 点, 我就随便添加一个,我也添加一个十六位的输入,输出点拖过来,这是我们的输出点,然后也可以添加我们的模拟量输入 ai, 然后添一个八路的,比如说我们随便添一个,添一个八路的,然后也可以添加我们的模拟量输出,添一个四路的模拟量输出,然后拖过来, 拖过来之后呢,我们把这个硬件先收缩一下,然后来看我们这个 cpu, 双击我们这个 cpu 就 可以进入它的属性,在这个属性里边就可以找到这个 port 内的接口,找到我们这个以太网地址,就是设定我们这个三百 s 七三百的这个网口的 ip 地址, 设定它的 ip 地址对应了你想设定成多少的 ip 地址就可以。然后我们这 di 点, di 点就可以看到它是其实地址是 i 零点零到 i 一 点七, 那么就是他默认的分配的这个,呃,输入点的这个地址输入点一样,输入点我们可以看到他是分配的是 q 四点零到 q 五点七,这是 q 四点零到 q 四点七, q 五点七这个位置呢?在这里也可以,也可以修改,在这里也可以修改,比如说我们改成零, 嗯,零好像是打到,你看应该是可以修改,比如说十吧, 十看他,他这样他就可以把这个 q 点分配完,他不像西门的两百 smart, 他 这个输入输入点他是固定的, 那么我们这个西门子,两百西门子薄图呢?他这个输入输出点都可以分配,那么我选这个模拟量采集,模拟量采集的输入输出点呢?是二八八开始的,那么我也可以改成二五六,一般我们都是二五六。然后模拟量输出呢,我们也可以看到他分配的是三零四开始的,我也可以改成二五六, 那么然后点翻译,点翻译,点翻译完了之后,那么我这个程序呢?我可以打开我的程序块,他默认有一个主程序,在我们的主程序里边,我们就可以写我们这个程序进行读的程序,这就是一个西门子博图。 呃,祖泰,一个西门子 s 七三百的一个 cpu 输入点输入点模拟量输入点模拟量输入点的一个操作过程。那么喜欢的朋友可以点个关注,感谢支持。
61工控小张001 27:19查看AI文稿AI文稿
27:19查看AI文稿AI文稿大家好,一条视频教会你西门子泊图软件常用的基础指令,这条视频干货满满,建议大家先点赞再收藏,方便回头反复观看。接下来给大家进行逐一讲解。视频开始之前还是提醒大家,无论项目大小,一定要有程序框架结构的意识 啊,就拿我们这个样例程序为例啊,我们在主程序段对每一个功能块进行调用,那么 单独的这个数据库,然后建立一个文件夹,那么比如说这里边用的的 date 数据,用的的 d i d q, 这里的 d i d q 是 模拟的硬件节点, 那我们接下来讲这个每一个指令,我们双击进入我们的位逻辑指令,然后点击右侧指令,有一个取反,这个取反的意思呢,就是当我们的常开触点闭合的时候,线圈断开,常开触点 再断开,然后线圈是闭合,就是字面上的意思,他俩是取反的,然后置位复位, 在右侧这里置位指令,复位指令,然后当 d i 一 常开出点闭合,然后再断开,当它是一个点动按钮的时候,它点动一下我们的 d q, 然后 d q 一, 它一直是置位的状态,我们这里找一下这个 d q 点,这里进行一个分频分频操作,我们这里可以看到,然后给它监控一下这个 d q 一, 然后置位, 当我们的 d r 二,然后给它置位的时候,我们的 d q 一, 然后它又复位了,这就是我们的置位复位指令。 然后接下来是置位域和复位域,同样是在这个指令块里的置位位域和复位位域, 它呢针对的就是我们连续的 dq dq 一, dq 二, dq 三,然后这样连续的多个数据,使用这一条指令就可以上面写起始地址,下面写数量。比如说我们在监控看一下, 找到我们的这个 d q 监控,这里是从 d q 二, d q 二开始的连续两个,我们看这两个状态,当我们 d i 三闭合的时候,我们的 d q 二和 d q 三是得电的状态, 当我们断开,它也是闭合,然后当我们 d i 四,然后闭合的时候,我们的 d q 二开始的连续的两个线圈,然后它是断开的 啊,这就是我们置位域和复位域,我们再看置位优先和复位优先,找到我们这这里这个指令置位优先和复位优先, 那么这个指令呢?就是当我们的 d i 五和 d i 六同时置位的时候,它是以复位优先为主啊,这个是二一吗?是以复位,后面是不导通的,当我们的 d i 七和 d i 八同时导通的时候, 我们是以质位优先,就是我们的后面这个线圈是得电的状态啊,这是我们的质位和复位优先,那么上升沿找到这里,这是上升沿,上升沿指令 首先看上升点 di 九 di 九,当我们闭合的时候,然后再断开,它对应的是 d q 六,然后它是一直得电的状态,我们看一下这个是不是 d q 六,然后一直得电, d q 六一直得电,那 d q 七呢?然后它这里有没有得电呢?我们找到这个 trace, 在 这个 trace, 在 这个曲线图里面,我们去监控看一下, 我们找到这个 d q 七,大家可以看一下这里 d q 七,然后我给他 di 九,我给他置位一下,这个 d q 七是明显的,它是导通了一个扫描周期, 我们给它断开,我们看一下。那么 d q 六刚才我们给它置位了啊,这里没有写,但是这个 d q 六它是一直保持置位的状态,我们找到 d q 六啊,这是一个置位状态, 嗯,它这是一个点动,然后又恢复,当我们的 d i 三零,我们的置位上上升沿,然后下降沿,下降沿,然后有效吗?有效以后它就把 d q 六然后给复位掉了 啊,同样的这个 d q 九也是导通一个扫描周期,我们看一下我们的曲线图,进行监控,找到这个 d q 九啊,大家一会看一下,首先我们 呃闭合,闭合没有反应,然后它是下降沿嘛?然后我们再断开,断开的时候 d q 九啊,我们是闭合一个扫描周期,这就是我们的上升沿和下降沿。 这里要注意的是,就是我们的上升源和下向源在这里面是用的这个是静态变量啊,不能使用这个,不能使用这个临时变量啊,这里边要注意一下, 然后我们这里有注视上升源, d q 六常亮,然后 d q 七是一个扫描之期,以后就会灭, 然后我们如果这个呃这个状态,然后可以在我们的 d q 啊,就是我们双击这个 d q 数据库里边,在这里边进行监控,可以看到它的状态,但是我们的 d q 七呢?然后它是一个扫描周期,我们可以在这个 choose 的 啊, choose 这这里这个曲线图里边,然后进行观看,嗯,把它取消掉,给大家看一下这是怎么组态的?组态就是信号,然后输入你这个 dq 七的对应的点位,然后彩样,然后触发器,然后下载进去,然后 给它监控,然后这个就我们就可以看到,然后给它闭合断开,然后就可以看到它这一个扫描周期的状态啊,这是我们上升沿下上沿,然后这个是 上升沿和下降沿的一个扫描前面这个程序段指令啊,就比如说你前面不是一个单独的一个位,和这个一样是单独的一个位,然后我们这个是前面的这一条 指令,然后比如说有好多常开处点,或者说好多条件,然后它导通的一瞬间,然后让后面这个程序进行执行。那我们再来看一下这个, 当我们的条件数据等于五十的时候,我们在一个扫描周期,然后让这个 d q 十,然后 导通一个扫描周期,然后同时在它上升的这一瞬间,然后将十赋给这个数据啊,我们来看一下给它输入五十, 它是不是把这个十付给他了,说明它这个确实导通了。那么我们 d q 十有没有导通呢?我们看在这里这个曲线图里边,这确实也导通了 啊,那我们下降沿呢?同样也是我们应该给它恢复一个非五零的值,它在下降的一瞬间, d q 十一会导通一个瞬间啊,导通一个扫描周期,同样的会把我们的二十赋给这个我们这个数据, 这个就是对应的我们的位逻辑指令,我们再看它的主程一段,再找一下我们的这个定时器指令, 双击我们监控取消,再重新监控一下,找到定时器指令再进行监控,然后定时器指令就是打开这里,我们从这个 d p 讲这个常用的指令, 首先是我们的 t p 指令, t p n 指令,我们做了一个程序,就是当我们的 d i 点闭合的时候,然后这个是五秒钟以后它会断开啊,比如说我们这个闭合闭合的一瞬间,然后我们的线圈是一得电的,然后 时间到了以后,他这个线圈是断开的,这个可以用做我们的那个起保停线,呃,起保,呃,这个星三角降压启动里面啊,可以这样去用啊,当我们触点闭合的时候, 它是一直是导通的啊,一直导通直到这个时间到达,然后我们这个线圈才断开啊,这是我们的脉冲,然后我们常用的是这个 t o n 的 这个定时器,首先我们给它断开,当我们的 d i 点我们一 闭合的时候,他延迟一段时间,我们的这个线圈才会得电啊,跟上面这个相反,这个是一闭合他就得电,然后五秒后他断开,这个呢是我们一上电,然后他是五秒钟以后才会线圈得电, 然后这有一个 t o n, 然后是五秒以后启动电机。我们这这里是有一个 d i 十一是模仿的启动按钮, d i 十二是模仿的停止按钮。我们这里边 是常开出点啊,实际我们连过来,如果是呃点位是应该写长 b 出点,但是我们没有连接外部的,实际的呃即停啊,或者是停止长 b 点,所以说我们这边人用的一个长开点代替 啊,当我们的启动按钮一按下的时候,我们定时器啊开始接通,五秒以后,然后进行一个断开啊, 这就是我们呃,用用,用这个 t o n, 然后做了一个延时断开的一个功能 啊,就这个为什么没有用这个呢?就是,呃,我们常用的就是用这个 t o n 啊, t o n 这个接通延时定时器去做我们的延时断开啊,还有我们还有一个自复位的一个定时器, 这个是当 d i 十三,然后自锁启动,然后我们的长臂,我们的长臂这个就是模拟了一个 停止点位啊,当我们这个 d i 点我们一启动的时候,我们的线圈开始得电,我们计时器开始运行,到达我们的运行时间,我们这个定时器然后就会复位, 这是做了一个自复位的,然后我们可以模拟一个,呃,比如说一个十秒或者是六十秒啊,这么一个,呃,自复位的一个定时器啊,这个有什么用呢?你比如说我们可以 执行我们的这个一直反复动作的一段程序,或者是我们的红绿灯都可以用这这么一个自复位的一个定时器去做啊。我们比如说做了一个十秒的一个自复位的一个 定时器,那么我们小于三秒的时候, d q 十六是亮,然后大于三秒,然后小于六秒是 d q 十八亮啊, 这是我们的自复位的定时器。我们再看一下我们的这个关掉延时,这个关掉延时用的比较少啊,当我们的 d i 十六闭合的时候, d i 十五也去闭合,我们这一上电,然后接通的一瞬间,然后它是一直是得电的,当我们的 当我们的按下停止按钮的时候,然后我们是这个五秒钟以后这个线圈才会失电啊, 这个用在什么地方呢?就是我们变频电机啊,变频电机它前面是电机连接的变频器,然后后面是散热风扇,当我们按下停止按钮的时候,我们的电机啊是断开了, 但是我们的散热风扇还让它继续转,然后就是延十五秒以后再给它进行断开,好给这个电机去散热啊,就是在这个变频电机里面有呃,有这个应用,所以说我们做这个项目呃样例的时候都是结合我们实际的这个 工程啊,我们有一个下面是这个时间累加计时器,时间累加计时器,我们启动,我们的这个定时器开始运行,然后我们给它停止, 然后我们的定时器是保持现在的时间,然后你再启动, 哎它又继续运行,直到这个时间到达,然后我们的线圈得电啊,当我们按下这个复位按钮的时候,我们的定时器重新计时啊,这就是我们的累加累加定时器。 再看到我们的这个主页,我们在这个定时计数器找到这个计数器, 然后计数器这里只列举了一个加计数器啊,就是我们常用的这个计数器,这个加计数和减计数就不用去说了,这个就是呃, 就是直接就是加的一个函数啊,我们有一个 就是给大家演示一下吧,看一下我们的 d i 十九闭合的时候,我们加一,然后我们 这个是复位,当我们 d i 十九闭合,然后再按一下再断开,然后再按一下又加一, 然后我们点击 d a q d i 二十,然后它就断开了啊,这就是一个加热技术的一个定时器,这我们常用的啊, 这 d i 十九,然后我们到达这个五次以后,然后我们的线圈可以亮啊,这是我们加热技术。 我们再看一下我们的比较指令啊,这个是我们常经常会用到的,比如说我们的红绿灯,或者说我们做一个程程序,然后在呃前五秒,然后执行什么逻辑,然后在后五秒执行什么样的逻辑,然后这个是常用的,通过这个比较指令来实现, 比如说一开始我们这个模拟的停止按钮,然后这个是我们的启动按钮,然后这个是模拟的一个呃红绿灯的一个状态,然后我们点击启动按钮以后, 做了一个二十秒的一个定时器啊,这同样的这个也是一个自复位的,然后这个这个线圈的输出点,然后 q 点,然后 让他去自复位,然后每二十秒,然后再重新计时。那么这个小于十秒的时候呢?是我们的对应的这个红灯啊,亮十秒,然后大于十秒,小于十五秒的时候,是我们对应的这个 啊绿绿灯亮啊,亮五秒,亮五秒以后大于十五和小于十八的时候,这个就是 一个是一秒的一个脉冲,就相当于是模仿绿灯的这个闪烁啊,当大于我们的这个十八秒,小于二十秒的时候,就是我们的黄灯啊,黄灯亮亮两秒灭,然后再重复这么进行一个循环, 这个定时器主要是在这个自复位啊,这个定时器,这个自复位就是取它的线圈,然后这个点是怎么出来的呢?给大家写一下。然后首先是它复制这个 线圈,然后点,然后 q 点啊,这是它的这个定时器, 然后我们再看这个数学运算, 数学运算这就是加减乘除,然后程序一执行以后,将这几个数进行相加,然后点点这个地方,然后可以继续加我们的对应的这个数据,然后由于几路,然后就是将它们相加,然后得出后面的这个数据 给下载,然后再模拟运行看一下, 然后这对应的是减,然后就是因一,然后减减因二,然后得出我们的数值值,然后这个是相乘,然后这三个数进行相乘,这个是消除一百,然后除以二点五,然后是加减乘除,然后这个是我们的递增指令 啊,我们看一下这个数学函数递增啊,在这里,在这递增指令这个地方呢,就是我们当我们的 d i 点闭合的时候,然后这个自加一,然后再闭合,然后又加一, 断开,然后再闭合又加一,这是我们的自加,就是每次都自加一,然后当我们的呃点动按钮,然后闭合的时候,这个是自减一,当我们点动按钮闭合 再断开,闭合再断开,然后同样的这个 mw 一 百,然后再闭合一下,然后它就变成零了。这个地方要注意的是什么呢?当我们这个上行沿这里啊,这个地方一定要写成 静态变亮,不能是临时变亮啊,这个为什么不能写临时变亮呢?然后给大家演示一下 这是 time, 比如说我们取一个临时变量加在这里,然后这个自检这里,然后我们也取一个临时变量, 然后我们再给它下载运行,然后给大家演示一下会出现什么样的问题, 先给它断开, 你看当我们的上升眼触发的时候,应该它是自加一嘛?你看,但我们这个 数字它是一直在在运行,所以说这个地方我们一定要切记,一定要使用静态变量,包括我们这个地方也是,你当它断开,我们这里闭合的时候, 它也是一直在减一,你要是不停止它将一一直运行,而且你点一下,然后再松一下,它是不是加一是加了很多,它是根据它的扫描周期来的,所以说我们这个地方一定要用这个静态变量啊。 p 零, p 零, 我们再下载运行一下,然后再监控,然后我们的就是相当于处罚一次加一个,处罚一次加一个啊,这就是我们。 嗯,这个递增和递减指令,然后这是获取最大值和最小值,可能是在这个数值计算里面获取最大值,最最小值啊,你这里边输入 这,我们这是常量吗?到时候我们实际是变量,然后取这四个的,然后最小值,然后这个是取最大值,然后这个运计算,这个计算呢也是常用常用到的,你看我们看这里, 呃,就比如说一个复杂的一个运运算公式,然后我们可以在这里然后印一,加印二,然后减印三,然后可以来乘以印四,再除以印五,然后得到我们的这个数值值啊,这就是我们这个运运算指令。然后我们再看, 看到前面我们在这最后这个移动指令,这有一个木屋和有一个交换, 哎,这个移动指令呢,就是传递啊,比如说你把一个数据刚才我们也用到了,就是把一个数字,然后 可以同时传给多个变量,或者是一个变量啊,都可以,这是目,然后这个是交换值的指令 啊,这个交换值指定可以用到什么呢?比如说我们西门子的对其他设备的通讯啊,通讯过来的这个数据高低位啊,高低字节高低字,然后有一个转换,然后我们可以在这里边进行一个计算,然后 这个这个指定就是这个交换指定,交换指定,如果是你交换的 word 和 d word 的 时候,我们要注意一下,给大家看一下, 放,放大看一下。首先如果是我们 word 类型的, word 类型的,它是肯定是一个十六位的,对吧?这是一个十六位的,它交换是前八位 啊,前八位和后八位进行交换啊,也就是这一段和这一段,然后进行交换啊,它跟它进行交换啊,交换以后啊换算值,然后 d word 呢?他不是单纯一二三四五六七八啊,四八三十二,对吧?四八三十二, 他不是直接把后面的十六个和前面的十六个 直接交换,他是经过两次,首先要把这八个进行交换啊,嗯,大家可以看一下,我们这里先一二三四, 首先是它两个进行交换啊,后八个啊,后八个的这两组进行交换,交换完了以后再转换一次啊,再转换一次给它转,交换在前面去了 啊,再再给大家我们看一下啊,这个比如说我们这个五十换算过来,十进一只转换成一,一换成成这个了,他就是二进一只转换的,然后低过了呢,你换一,然后他是转换这个数字,然后再教给大家一个 一个小技巧,然后我们输入,嗯,直接摁这个 windows 键,加 r 键,或者是直接我们在这个这里,然后输入运行指令啊,输入运行,然后将我们的程序员的这个键盘,然后进行调用出来, 或者是在这里输入 clc, 然后进行调用。在程序员模式以后,我们 可以转到这个尽置上啊,我们看一下这个五十啊,五十,五十对应的是多少呢?首先我们输入一个十尽置的五十, 五十,它对应的我们的是一个 word 类型的嘛,然后我们切换成二尽置,五十切换成 二进置,然后这是 d word word, 这不就是这这十六位吗?对吧?是不是和这个是一样的, 和这里是一样的,然后我们进行换位以后,就是后面八个和前面八个,然后进行一个换位,零零幺幺零零 幺零,然后这对应的十进置是五十,对吧?然后我们给他看一下啊,将它进行一个转换, 零零幺幺零零幺幺,然后零零幺零,然后把它们后八位变成零,是不是幺二八零零,然后得出这个数值了,然后这我们是 word 类型的,然后我们再看一下这个 d word 类型,我们说一个一, 然后 d word, 我 们这个一,然后这个运算,按照我们理解是不是应该这个十六位和前面这个十六位直接导换一下啊?我们这个不是这样运算的,是先前面 这八个进行运算,转换一下,然后这个八个再进行转换一下,它先转换到这里,这还没有完,然后下一步呢,然后再把这八个和前八个,然后再转换一下,这里变一,这里变零,我们是不是得到了这个十进制的这个数数值 啊?这就是我们的转换指令,那么到此呢?所有的这个基础指令就讲完了啊,就是我们常用的基本就是 就是这些指令,只要把这个基本的指令用熟了,其他的指令就是什么时候用的时候,什么时候再去使用就就可以了。好,这节课就到这里,谢谢,谢谢大家。
12狗头军师PLC 03:21查看AI文稿AI文稿
03:21查看AI文稿AI文稿泊图下位键组错该如何解决?我们幺二零零在转至再键之后呢,他会报一个下位主键错误,那我们遇到这种情况该如何去解决呢? 我们可以从三个方面去排查。第一个,我们先要去检查我们的强制表里面是否有强制 i o 点。第二个呢,我们要去看 cpu 固件版本与我们实物的 cpu 固件版本是否匹配的。 第三个呢,我们要去看我们主胎的硬件与现场的实物是否一致。我们首先来看第一种情况,我们是否有强制 i o 点位,那我们需要注意的是,在这里只有强制 i o 点的时候,他才会报下位主键错误,如果你是强制 m 点的话,那么他就不会报这个错误, 我们可以在左边可以看见我们这个 p l c, 他 确实有强制的点位。我们往下翻,点开监控与强制表,点击强制表,这个时候我们要需要把全部的强制点位给取消, 那么此时我的报错就消失了。那第二种呢,就是要去看我们的 cpu 的 固件版本与我们这里主胎的 cpu 的 固件版本是否是一致的,我们在这里呢,需要往下翻, 我们要点击我们的 pc 端口,去访问更多设备,去查找到我们现在正在连接的 plc, 然后我们点至在线和诊断, 我们连接它。在这里呢,我们可以看到我们 cpu 的 固件版本,我们是 v 四点五的,我们再返回到最上面,点击右键,点击属性, 点击目录信息,我们会发现我们的固件版本确实是一致的,我们点击确定。第三个呢,我们要去看我们的主台是否与我们现场的设备是一致的?我们点击设备和网络,然后我们双击我们的 plc, 我 们在这里我们会发现我们有一个 多的通讯模块, c m 幺二四幺,那么我们在现实当中呢,并没有这个通讯模块,在这里呢,他也会显示一个不可连接,那就说明我们在现实当中并没有这个模块。我们需要转至离线之后,然后点击删除, 删除完成之后,我们要返回我们的网络,试图在这里呢,他也是一个错误的,我在这里有一个 plc 二与我们 plc 一 的连接,但是在实物当中呢,我们并没有这个连接,我们依旧需要把它给删除掉, 这个时候我们再重新下载进去, 然后再转至在线, 就会发现我们的下位主键错误就已经全部消失了。魔图下位键主错,按以上三种原因排查即可点赞、收藏防丢失,有其他问题在评论区留言。
248我在技成当班主任 05:26查看AI文稿AI文稿
05:26查看AI文稿AI文稿hello, 大家好,今天我们来看一下 p g p c 接口的一个讲解,还有我们的程序访问点, 我们也详细说一下。呃,现在看到的呢是我在控制面板中打开的 p g p c 接口的一个对话框,这是我们看到的是访问路径,访问路径这边的应用程序的访问点, 他的定义是与连接通信伙伴的逻辑设备名称,我们点这个右侧的下拉箭头,看到呢里面有很多,当我们安装完成博图软件的时候呢,一般会 替我们装好下面四个,他就会替我们新建下面四个应用程序访问节点。如果每种通信类型只安装了一个通信处理器,这个时候我们这时候的话,我们在这个, 呃,比如说这个额头的这个项目里面,呃,在这个 wincc 和 plc 的 链接里面,这个地方选访问节点的时候,你可以选自动, 也就是也就是这边这四个是没有更改过的,默认安装好的,这个时候我们是可以选选自动的。 但是你如果呃这些应用程序的访问节点,比如说像我一样,我进行了添加或者删除或者修改过,呃,这个时候呢,你在我们的这个这个地方链接这个地方选自动设置的话,他就容易出错, 更换电脑后呢,也可能没有你选的这一个接口,这是比较麻烦的。所以说呢,我还是建议大家像我一样就是做项目的时候呢,自己新建一个应用程序访问节点,比如说我这边新建的两个测试和测试仿真 都是可以正常使用的。呃,下面呢我们看一下这个接口主要接口的一个类型啊, 第一个看到的呢是只要看到这个 wireless 就是 无线,实际上呢就是如果我们要进行这个无线通信的话,就需要选选这一个接口。 呃,再往下翻,这边这三个一组呢,看到的是我们的实际上是我们 本地有线仪态网卡的一个连接,也就是你的本机的有线网卡的一个连接,这里面都有三个,这个是我们一般选的这个激活的这一个。 再往下看呢这个,这有几个呢?是 wifi, 如果通过 wifi 连接的话选这个。 呃,这个 p l c internal local 点一这个呢是要用这个链接的话,我们必须要安装 semitek net 这个软件,也就是我们薄图的另另一个软另一部分软件, 然后呢,就可以通过。 net 和这个 p l c 呢建立通信,然后 p l c sim 点 iso, 点一这个链接呢是 仿真 iso 连接的时候使用的。 plccm 是 仿真 仿真我们的这一个连接就应当到这个连接的时候使用的,然后 plccm mpi 点一这呢是仿真 mpi 连接, mpi 呢是西门子专门为这个三百和四百 plc 呢设计的通信协议。 microsoft profit bus 点一这个连接呢,实际上也很明显仿真 profit bus 点一的一个连接。呃, pro 仿真 profit bus 的 一个连接,第一个呢是仿真 t c p i p 的 一个仪态网连接,它呢是三百四百一千五 p l c 仿真与 win c c 通信的时候都是使用这个,这个是应用比较多的。 呃,这个 serio cable p p p i 这个呢是 串行线缆通信串行线缆,也就是呢二百 plc 通信呢,使用的 下面的这几个呢是 plc sim 的 一个仿真接口,比如说这个,呃,我们下载,我们启动这个 plc 仿真的时候,下载的时候呢就选择这一个接口, 下面这一个 t s adapter, 这一个呢是电话网线的一个连接,就是如果你想通过,呃,想通过电话网线呢?将 plc 呢接入网络,就选这两个是类似的。 最后一个呢是 usb 的 一个通信连接。以上呢就是我们所有的这个接口它的一个运途,当然我们每个人的电脑呢是不一样的, 大同小异啊,到时候大家区分好了,今天我们就到这。
 05:53查看AI文稿AI文稿
05:53查看AI文稿AI文稿薄图 v 二一 package manager 非具例子官方文档的介绍我们还是先来看一下这个幺二零零极兔非具官方例子的项目,官方例子的这个文档应该怎么去看? 我们首先看这个 overview, 这款就说整体的一个介绍,那它哪些组成部分呢?首先 web drive 就 指的这个是送料 saw carriage drive 就 指的是飞距的电机,这就是飞距。 sensor 就 指的是探针的这个传感器就由这四部分组成。那它完成了哪些功能呢? 这个例子第一个他就有两种切断方法的功能,一种就是直接切, 还有种就是斜切,提供了两种切的方法。那这个是什么意思呢?这个就是我上一节课视频讲的主轴有两种情情况,第一种有一个实际的一个电机,这个是一个实际的电机控制,那第二种情况就是实际电机,我没有 这个电机,是比方说是第三方的,那我直接在这个传送带上我加一个外部的编码器。这个功能讲的是什么?这个功能讲的就是说在我设备运行的时候,我可以任意修改参数,比方说长度啊,速度啊, 包括我的那个同步的模式啊,减速度啊,在运行的时候就可以改这个模式指的就是说当我设备停的时候,我可以直接去切,当我设备是在自动运行的时候,他也可以直接去切, 就说他切,并不是说必须要在运行时候切,我不运行的时候和运行的时候我都可以切啊。这个功能就是指的是我同同步,他是以一个固定频率的一种方式去同步,而不是说我每次同步他,比方说我任意 位置开始去追或者是什么,他是以固定某一个位置去去追的,也就是说他同步的频率是固定的啊,这个就是说他可以设置他回来的一个速度啊,这个就可以他计算他的切的总共多少长度啊,切的次数啊, 就一个统计的记录的一个功能啊,这个就是探针的功能,可以根据探针去切啊,这个就是说当我探针切第一次切的时候,我前面几个探针的信号我不想要,那这这就是一个弹出探针的这么一个功能, 那这个可以产生一个间隙,我切完了之后,我切刀再往前再移一点, 产生出一个间隙出来,这个就可以优化回去的一个速度,可以改变。根据我的切割的长度 可以优化加速度,或者优化一个加加速度,这个就可以。 first, 这个就是第一次切,他可以通过一些设置去改变第一次切的一个长度,这个就是一个统计的一个功能,我每次切他每次切的长短, 那可以进行统计,统计最长是多少,最短是多少,总共切了几次,平均是多少,就可以有个统计的一个,那这个就是两种切法,第一种就是定长切,那第二种就是我传感器来了就切,传感器来了就切。但是这种探针的切法有一个问题啊, 探针一来了,在我没切完之前,他下次探针是不能来的,有这么个问题,所以说这个探针和切刀距离要挨的要足够近, 才能保证我每时每刻的切的大小都都一样。说他的切的频率是固定的,这就是硬件的一个,是一个定长切的一个试试意图,这个是使用外部编码器的一种 示示意图,这里就是一个程序的一个组成部分,那我们可以看到这个功能块, 这个功能块就是定长切的一个功能块,自动程序都在定长切的自动程序都在这里。 那这个 global db、 hmi 这个就是和上位机进行数据交换的数据都在这个 db 区里面。探针的功能块都是在这段, 都是在这个 f b 五这个自动程序里面。我们可以放大一点啊,在探针的程序都在这个 f b 五里面,这里面又有两个两个任务,那像对硬件的一些参数的设置,全部都是在这个差补的这个任务里, 那像这种自动运行的这个程序都是在这个 o b e 里面。这段程序就是模拟一个项目, 一般调试还是需要先模拟,模拟没有问题了,然后再拿到线上去调试,所以模拟程序还是需要需要去做的,这是一个同步的一个概念。 黄色这条线就是我祖传送带,它的位置就相当于是一个周期变化的一个一个位置。那蓝色这条线就是我飞距的这条线,那黄色这段就是从静止到开始追同步这段的时间, 那浅绿色这段我已经同同上了,那这这段呢?我可以进行切割,还可以进行增加间隙,在这段里面去进行。好,那今天这部分先讲到这里。
88老丁讲PLC



猜你喜欢
- 1006赛博太白