安川六轴机器人回原点步骤

粉丝2.2万获赞8.0万
相关视频
 03:27
03:27 09:03查看AI文稿AI文稿
09:03查看AI文稿AI文稿三个圆点位置,首先讲一下工艺进行的作业原点,在我们操作之前呢,确保私教器的 gt 按钮是松开的操作模式,在试驾模式下面, 首先点击机器人,点击作业原点位置,回到作业原点设置画面,从这里我们可以看出,左边是六个轴,中间是原点位置的脉冲数,右边 是我们当前位置的一个脉冲数,现在我们要做的就是把原点位置脉冲数全部设为零, 设为一个作业原点,但是呢,我们当前位置呢不是零,所以我们首先要改变当前位 位置,折,然后都为零,那怎么改变呢?我们就手动的移动工业机器人,将这些脉冲每个轴的脉冲都设为零。首先我们要调到关节坐标系, 按下坐标,把这个调到关节坐标系,调完以后,按下,师傅准备再按一下后面的安全开关,把师傅接通,接通了以后把这个速度调到低速状态, 轻轻的按,不能按快了, 当调到一个非常小的值的时候,你这个时候应该调到最低速去微调,你看现在是二十八,我们要微调,这样就是一下一个脉冲 啊,第一个轴调到零了,现在调第二个轴, 把速度调一下啊,第三个轴,这轴 调完以后调第四个轴, 再来第五个轴, 这还第六个,走提走, yeah。 当当前位置都调为零以后,点击修改按回车,这个时候原点位置所有的脉冲都变成了零, 这个时候我们的作业原点位置设置好了, 现在机器人呢不在原点位置,那我们怎么让机器人呢?快速的回到作业原点呢?点击机器人,点击作业原点位置, 然后接通四伏,把四伏打开,把速度调到中速或者高速, 按下前进按钮,当当前位置全部都变为零的时候,机器人就回到了作业原点位置。当我们要设置 第二原点位置的时候,点击机器人这有第二原点位置,点击第二位原点位置,这个时候可以回到这个第二原点位置的一个设置画面, 左边是六个轴,中间这里是第二圆点的脉冲值,然后这里是当前位置的一个脉冲值, 右边是当前位置跟第二圆点直接达到他的一个呃位置一个差值,这里显示出来了第二圆点就是为了防止机器人跟 周边障碍物的一个碰撞,所以说我们第二原点可以跟作业原点位置一样的,我们要把第二原点设置成跟当前作业原点是一致的时候,我们直接点击修改就可以按回车, 这个时候第二圆点就变成了全部变成了零。第二原点位置跟机器人作业原点位置是一致的,但是我们也可以不一致,那我们怎么不一致呢?目前这个位置呢,就是机器人各个轴脉冲成为零的一个圆点位置, 现在我们第二原点我们不想当在这个位置,假如我们要改变他的位置, 假如这是工业机器人第二原点,因为这样的话,机器人前面那个币就没伸出来了,就弯下去了,这样不会碰到外面的人,相对来说会安全一点,所以我们把这个当做第二原点, 现在我们工业机器人已经移动到第二原点位置了,但是第二原点位置当前的脉冲值 还不是我们要的第二圆点的脉冲值,所以我们要把当前位置的值设置到第二圆点位置,怎么设置呢?首先接通是福 师傅,师傅准备已经按下了,按下安全开关, 点击第二圆点位置的一个设置画面,这个蓝色的框框必须在第二圆点位置画面才能修改,再点击下面这个修改按键, 再点击回车。好,现在看一下第二圆点的这个脉松值,可以看到跟当前位置是一模一样了啊,这个呢我们的第二圆点位置就设置好了, 如果我们想让机器人回到第二作业为原点,那点击机器人点击第二原点位置, 同样的是接通四伏,按下前进按钮, 这个时候当前为 的坐标值,这时候当前位置的脉冲值跟第二原点位置的脉冲值就一致了,这个时候就回到了第二原点, 现在教大家查看机器人的原点数据,怎么查看呢? 首先我们让机器人回到原点位原点位置,点击机器人 作业原点位置,接通四伏,按前进, 机器人回到原点位置以后,点击系统信息 进入管理模式,管理模式的密码是八个九,进入管理模式以后,点击机器人,我们可以看到这里有个圆点位置,我们点进去 这个时候可以看到原点位置左边是六个轴,右边是他的一个绝对为原点数据,这个绝对原点数据就是工业机器人六个轴里面 六个四伏电机的慢速数数据,就是机器人现在保持在原点位置一个姿势的一个绝对原点数据。 那刚才的第二个第二原点位置呢?那个脉冲值为零呢?其实他是一个相对圆点数据,他是相对于这个值, 而且他他的脉冲是零,但是他的绝对原理数据就是这样的,默认就是这样的。这个数据呢,你也可以修改,但是当我们把这个数据设置好了以后,我们正常是不不去修改的,我们可以按下选择,在这里面输入数据去修改, 或者我们可以点击全部轴, 然后他会问你是否创建原点位置,也就是说把我们当前的位置创建为原点位置,如果你要改变的话就点四。
436斯比特机电 04:16查看AI文稿AI文稿
04:16查看AI文稿AI文稿欢迎回来,这里是课程的第七章节,最远点的前往与登录,本章节的内容呢相对简单,应该说是本次课程中最为简单的一个章节,所以呢也没有太高的基础要求,你要做的是了解和能够操作即可。 首先我们来看一下作业原点的概念,作业原点呢是与机器人作业相关的基准点, 该点作为启动生产线等前提条件,需要将机器设定在指定的范围之内,然后使其不与周边设备发生干扰或者说干涉。 如果说我们总结一下,用比较直白的语言来讲就是,第一首先就是作业原点,应该是根据需求而设定的,对吧? 我们这里有说是激情作业的相关基准点,第二就是他的前提条件是不能与作业发生干涉,也不能影响其他安全机制或者说阻挡安全信号,对吧?好,接下来我们继续往下看 看如何前往作业原点。首先我打开机器人菜单,选择作业原点,然后可以看到这样一个界面,对吧?这里我们已经看到作业原点值是这样一个值,是零负的六四六幺零等等等等,对吧?然后,哎,当前位置 啊,看到肯定与作业文原点位置是不一致的,那么怎么能够回到这个作业点呢啊?其实这时候我们来看一下啊,我们之前讲过 这个区域叫做人机对话框或者说人机的交付区域,我说了在这个区域呢,我们能够了解信息,或者说知道机芯这样一个状态,或者说我们当前的这一种操作,你看他在这里说了能够移动或者修改退运点, 也就是我此时做一个假设,也许我现在不前往到这个最远点,对吧?我如果说此时按修改回车,会出现一个什么样情况呢?我按修改回车,正面的素质不变,机器人正面的素质会和左侧素质会变到跟右侧素质一样,就是当前的位置。 我重新修改了,这一年待会一讲啊,有讲错的步骤,所以我们继续向下看。大家先讲如何前往。插播一个广告,最近结识了一个行业老大哥,高 自动化的老王,专门将最近他们交付的一些项目拿出来做分享,很多前沿应用案例,极具价值,欢迎关注。好,我们在接通四伏电源,确认四伏灯常亮的情况下,对吧?就视角和正面四伏灯常亮的情况下,我按前进键, 在前进的同时我一定要注意周围无干涉物,对吧?以免发生碰撞,对吧?无,无法直接移动时,我们要通过轴操作把进行移移动到一个相对安全的位置,再按前进键, 然后当原点位置和当前位置素质一致后,那么就完成了复位。也就说我进行走到了我原来设定的一个作业原点位置,对不对?或者说我从外部的物理条件来看,就是 往前激情一开动,动到最后直接不动了,那么他就走到要达到的位置了,对不对?嗯,好的,那我们接下来看他如何修改。就是在新设或者说移动激情需要新登录或者变更作业原点,怎么办呢?首先显示作业原点画面, 然后接通四伏电源,对吧?刚刚讲过,接通四伏电源,确认四伏灯常亮的时候,我确保现在可以移动机器人,将机器人移动到你的想要的一个新的作业原点位置,然后 确保四五点没有断开,就四五电源是接通的,然后按一下修改,此时上面灯为亮,然后再按回车 就修改完成了。是不是很简单?本次课程当中呢,没有第二个章节是如此简单的,所以说呢,接下来的课程呢,依然会有一点辛苦。好的,我们下一章节见。
94机器人研习社区 02:14查看AI文稿AI文稿
02:14查看AI文稿AI文稿好,今天讲一下我们这个安全机器人,嗯,运行过程中突然断电,然后我们这个私教器上面会报那个报警啊, 然后我们来怎么来恢复?首先的话如果是突然断电,然后开启的话,如果上面屏幕上面如果有报警的话,我们点这有个复位,按下复位键啊,先把报警报警消除掉啊,然后,然后我们在那个啊,点开 机器人,点开机器人第二键的位置,点开啊,然后我们按那个四回准备啊,死人键按住,然后按这个前进键, 好,我们这个上面的这个数据啊在进行归零啊,然后我们的机器人的本体也在自动找零, 好,骑行。嗯,到零点位置的时候,他是应该是这个是这个姿势啊,他每个轴上面也还有这个刻度啊,这个轴啊,他对准这个刻度线啊,这个轴已经归零了, 然后这个旋转轴,旋转轴,这也有一个刻度线啊,啊,还有我们夹手上面也有个,也有 测速线啊,此时本体已经归零,然后我们私教器上面啊所有的位置全部归零 啊,此时的话我们点一下这个数据,左上角数据啊,如果如果是机器人原点位置丢失的话,我们点数据,他会弹出一个位置确认,我们把这个 位置确认,点击一下,好,我们机器人零点零点位置已经找回来啊。
143誉德自动化小讲堂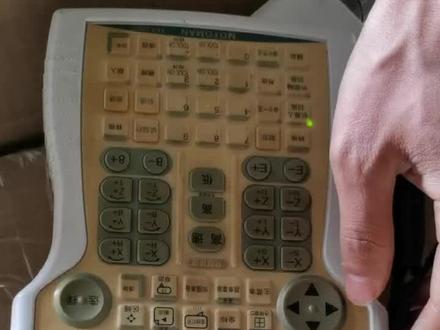 00:44查看AI文稿AI文稿
00:44查看AI文稿AI文稿开始了,先是按系统信息,按安全模式,然后管理模式,按选择键,按管理模式密码是九,然后按回车, 然后这里有三把钥匙,然后点机器人,这里有个原点位置,点原点位置,然后这里有这么多数据, 然后这里数据呢?你直接给就把,就把你这一个,这一个里面的数据啊, 全部拍个照片,拍完照片之后一,然后一个一个改成一模一样的数据就行了啊?拍完照片之后,然后开始改。
321斯比特机电 00:48查看AI文稿AI文稿
00:48查看AI文稿AI文稿安全机器人之三大原点位置安全机器人有这么多原点, 今天我们来学习一下这三种原点。来看原点位置。原点位置为机器人出场时各轴零刻度线,注意,当丢失原点后,需要重新校准原点。校准的步骤为, 在原点数据填入控制柜编码器数值光标左移,选择需要较准的轴进行修改。再看第二原点数据。第二原点是根据原点位置而存在的,当导编码器与绝对旋转数据误差过大时,需要根据原点位置确认。机器人各轴零点 作业原点位置,只要不与周围设备存在干涉,可以根据需求来设置。
461雄安凌飞工业机器人 00:30
00:30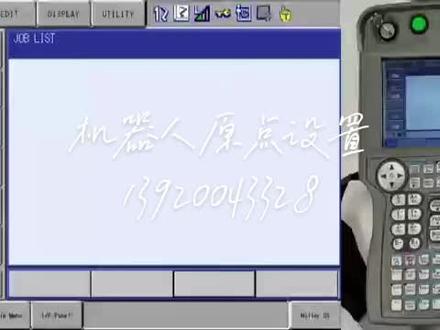 02:48查看AI文稿AI文稿
02:48查看AI文稿AI文稿two hundred controller so first, you're gonna want to change the security level to the highest on the dx two hundred that's safety mode we're going to go to system info then security and you're going to hit select then hit down arrow then hit select my default on the dx200 safety mode password is the five key 16 times and around after you've completed putting in the 5k 16 times in a row, you're gonna want to press enter and then you will see that the password has changed next you're going to want to find the robot icon then go to home position icon then it select so in this case on our robot the b axis does not have any absolute data so you're going to want to see if you have servo on flashing in our case, we do not so we're gonna want to hit servo on ready now the green light is flashing you want to pull in the enable switch to the middle position and then jog the affected axis to where the alignment marks line up once you have completed lining up the marks on the robot you're going to want to be in the middle where the circles are at on the where that affected axis is actually highlighted then hit select then you'll have this pop up that says create home position it's case you're gonna say yes so if you look over to the third column works as absolute data for the b axis that created the new number and that will conclude on how to create a single axis home position。
 00:49查看AI文稿AI文稿
00:49查看AI文稿AI文稿就连说过了再见也看不见,有些埋怨 给我的一 实在敷衍。 你笑的越无邪我就会爱你爱的更狂野, 在撒垃圾。有一些了解, 我是你的,你 从此。
48ò枫画ó 00:46查看AI文稿AI文稿
00:46查看AI文稿AI文稿今天小地主老师跟大家来讲一下安川如何标点零点。首先呢我们选一下模式,选择管理模式,密码呢是有个九点击回车变成了三把锁,找到我们基层这里面的原点位置,进入这个之后呢,我们就需要去看我们每一个轴的刻度有没有对齐,把每一个轴两个刻度对齐啊。首先我们对一下一轴,然后二轴 这个位置呢是我们的三轴,然后我们对一下四轴的位置,最后呢是我们这边的五轴,好,然后我们在这边呢选择我们的轴,是把我们的 s、 l、 u、 r、 b、 t 六个轴每个轴都改过去, 如果说你觉得每一个轴去交的话比较麻烦,我们可以点击编辑选择全部轴,把它全部都是创建零点位,这样的话就是我们单穿机器人零点标定的所有操作了。
248机器人—小地主









猜你喜欢
- 1.2万科学大表哥