python驱动虚拟人教程
话说去年也是差不多这个时候用三 d max 的开针方式弄了一段舞蹈动作, 由于 k 真实在太累,今天就换了种方式,决定用欧奔出的引体动作检测的关键点数据来驱动模型,所以就随便找了个舞蹈视频开始动作节点采集了。 直接用识别的关键点还是不行,数据需要处理一下。 通过借鉴前人的平滑处理方式,抖动虽然没这么严重,但是动作还是不怎么协调, 于是我就想用不按纸试一下,还是用 media pipe 检测,但这次用 pisan 驱动 哈哈哈哈哈。

粉丝211获赞2054
相关视频
 01:00查看AI文稿AI文稿
01:00查看AI文稿AI文稿我是虚拟助手小可爱,有什么可以帮你的吗?打开记事本,马上就好事。 打开命令号。 ok, sir, 我正在处理。打开命令号,好嘞,正在处理。 sir, 打开计算器 ok, sir, 我正在处理 ip 地址 ok sir, 我正在处理。你的 ip 地址是一点二零三点一百七十三点六一,方便起键。我把它也显示在输出界面了。 sir, 拜拜,每天好心情。 sir。
18代码医生工作室 00:26查看AI文稿AI文稿
00:26查看AI文稿AI文稿今天教你用拍粉驱动虚拟人,首先使用虚化引擎导入虚拟人模型,再使用拍粉抽取人体骨骼点三维坐标, 再将信号传给虚幻引擎,即可驱动虚拟人骨架。最后使用 lifing 可以 pp 驱动虚拟人头部和脸部。 人马已开元,我是人陪,关注我一起学 a i。
1.5万恩培-计算机视觉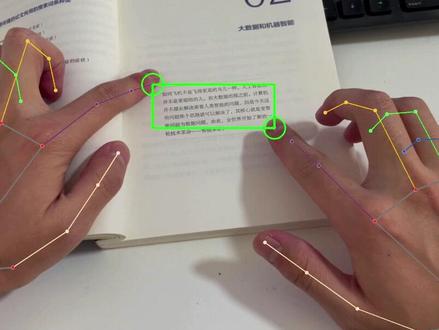 00:38查看AI文稿AI文稿
00:38查看AI文稿AI文稿用 python 开发一个虚拟点读机,如同飞机不是飞的更高的鸟儿一样。虽然能用,但朗读的语音缺少那么点灵魂。前一阵子 ai 孙燕姿翻唱花如雪送货, 我们可以用 ai 孙燕姿的语言模型重新朗读一遍,如同飞机不是飞的更高的鸟一样。 这个听上去就舒服多了。当然你也可以训练自己的眼模型,不过光有语音还不够。找一张静态图片,用赛赛托克可以驱动图片中的人物进行朗读,其核心就是变智能问题为数据问题。
978渡码 00:27查看AI文稿AI文稿
00:27查看AI文稿AI文稿宇宙中用到的三 d 图像技术有哪些?视频最后有元代码一 f h d 模型,给一张照片生成一个三维的你。二 photo wicked up 模型,让库里 pmg 詹姆斯 jpg j e t 互动起来。三 做丁翰大学的 vrm 模型,给一张图片生成脸部的三维图像。原代码地址如下记得点赞收藏吧!
155龙哥紫貂智能 01:55
01:55 07:52查看AI文稿AI文稿
07:52查看AI文稿AI文稿那我们通常说的这个虚拟人的驱动,它主要是有两类,那第一类呢是指这种就是动物驱动型啊。第二类呢是指生成驱动型,那这种动物驱动型,它通常是背后是需要有一个真人在驱动的, 那我们常说的这种中之人驱动,那所说的这个中之人呢,就是指呃驱动虚拟形象的这个人 啊,他通常是有三种形式来驱动,一种是光学动物,一种是惯性动物,一种是这个象头的动物。那我这个后面呢我们会详细再介绍。那我们现在先 大概的了解一下这个洞补驱动它具备的一个特点吧,就通过一个简单的短片看看。 对,就是大概举个例子,就是会有一个人然后去穿戴以动补设备来驱动这个虚拟形象啊,这只是一种驱动方式,然后这种动补驱动型的话,他通常就需要背后有一个真人来驱动, 那他在这种动作的灵活度啊,互动效果等方面呢,他是有一个比较明显的优势的。那第二种呢是生成驱动,那通常是输入语音, 然后他的语音动作表情都是由我们这个深入学习去实施,或者是离线生产驱动的。 那驱动的方式往往就是通过我们输入文本或者是呃语音,然后让他去说对应的话,然后或者说用指令去驱动他做对应的动作,或者是做对应的表情,那这种就是背 后他是没有一个真人来驱动的,他是由这个程序模型,然后通过指令或者是通过这种输入文本的方式来进行驱动。 那他们两个这个特点特点也是比较明显的,这边是需要有真人来驱动的,这边是可以不用这个有真人来驱动的,不用真人来表演来驱动的。那从技术流程上呢,他们都需要说有一个这样的一个原画的设计和建模的绑定, 都需要有这两个环节,那唯一不同的地方就是他需要动补设备,然后去捕捉这个真人的动作和表情来驱动,那这种生成驱动型呢?他就是不需要有这个 呃动补设备去呃捕捉这个中智人的这样的一个表情或者动作,他只需要我们输入这个呃文 或者是语音就可以制作内容那两条线。这个动补驱动型他需要的一个技术突破往往就是呃,随着我们这个动补设备驱动动补设备的进步吧,他往往就不太需要这种昂贵的这个惯性动补或者是光中补。 我们说的惯性动物是他穿戴的这种可穿戴型的这个设备,动补设备就是捕捉他动作的,这种设备 就是惯性动物,那这种设备的话往往就是阻碍他这个平民化应用的一个比较 重要的一个点吧。所以说,呃,如果说能够脱掉这些洞补设备,直接用摄像头来驱动的话,那随着这个摄像头驱动的这个技术,嗯,不断的进步,算法的进步,那么我们通过摄像头驱动也可以实现这个比较高的精度以后,那他就会迈向一个这个 平民化应用的这样一个步伐。那么语音合成和这个上传这个文本来驱动这一块呢? 他的这个使用的这个门槛就比较低,他就是只要你能够写文案,然后可以录语音, 可以用这条线来进行驱动,那他们俩的这样的一个试用场景也不太一样,那这边的话往往就是会用于一些这个降低这个影视行业的门槛,或者是呃推动我们这个消费,或者是虚拟偶像、大型直播等等。 那生成驱动型往往就是用于一些简单内容的一些制作,或者是一些虚拟客服、虚拟助手等等。关于动补设备这块呢,刚刚也提到了有 三种这个动补设备可以进行驱动,就是呃光学动补、冠训动补,还有这个 ai 视觉动补。那光学动补呢?他的这个 洞捕的精度是最高的,然后保真程度也很高。那就像我们上图看到这样,他是在一个摄影棚里,然后几乎是全绿木的一个场景, 然后用呃光学设备去捕捉他这个人物在这个三维这个空间里的一个位置,然后包括他的动作,他的这个肢体动作啊、表情啊等等。 在这个三维场景里面,他的一个动作信息,然后去驱动我们这个三 d 形象来做对应的这个动作。同样的动作,那他的这个技术复杂度和这个拍摄的要求都比较高,而且他的这个造价成本很高啊,应用范围是比较小的。 那第二种呢,就是惯性动补啊,就是我们刚刚看到的那个视频,他就是穿戴着一些惯性动补的设备,然后去捕捉这个人的肢体动作, 然后捕捉完这个肢体动作以后呢,用这个肢体动作的这个信息去驱动我们这个虚拟人做同样的动作,那他的价格相对于光学动物来说呢,会稍微低一些,然后他也不太依赖这个场地的环境, 那他的这个动补的精度会比这个光学动补稍微要低一些,然后他的稳定性也会比较低,容易发生这个位置漂移。位置漂移可以的,可能我们一会会看到这个例子。 然后第三类呢,是这个 a 的视觉动物,那他的特点呢?就是他比较简单,容易上手,然后成本也比较低, 那同时呢他的呃也存在他的一定的局限性嘛,就是他是这三类里面这个动物精度最低的,然后他的这个自由度也比较低,视野是比较固定的。那我们这三类进行一个排序的话呢,就是 是使用上手简易程度来说,就是 a i 这个视觉动物,他的简易程度是最高的,就是最好用的,最医用的,然后到惯性动物,到光学动物。 所以未来如果说要推向这种平民级的应用的话,那更多的是依赖于我们这个 ai 的视觉动物的这个技术的进步, 然后才能说把这项应用推到更多这种平民机应用那里,那保证程度和稳定性。当然目前是这种造价成本更高,复杂度更高的,他的保证程度和稳定性更高了。 所以就是目前的话,我们还是如果说平民级应用的话,还是比较依赖于说 ai 视觉动物这项技术能不能达到一个比较高的精度和自由度,那我们大概看一下。呃,我们公司做的一个生成驱动型的一个 a 主播,就是用文本想要引进来驱动的一个大概的一个视频介绍,介绍了会比我介绍的详细实时驱动还虚拟主播的视觉化智能平台。 平台拥有海量的 a i 数字形象模特库与百万像素的数字人脸形象,个性化的选择满足了各企业、品牌、机构在全媒体下的视觉化内容生成需求。 同时每位 a i 主播均具备十四个国家的语言。 through a simple text speech can be real time one click driven ai anchor for you to carry out different scenarios of the broadcast and interpretation services。 对,大概意思就是他可以通过输入文本来驱动这个 ai 主播去呃说对应的话,然后做相应的动作,然后他可以是支持多种语言来进行驱动的。 那这是真人主播这一类的一个应用啊,包括还有三 d 主播这一类的应。
14嘉程商业评论











猜你喜欢
- 7404林亦LYi
最新视频
- 2215难落