蔚来nop什么意思
什么?买车这么久,你还不知道 nop 加有多牛?一个视频带你读懂 nop 加领航辅助的高能时刻,不赶紧用起来可就可惜了。第一, nop 加可以实现主动超车的功能,系统会自动判断超时时机。其次, nop 加可以自主实现车辆河流奔流,还会和老司机一样自动变道,选择道路上最优的车道。缺乏安全感的朋友们也不用担心他会 横向保持安全车距。在翻页系统更新后,堵车时的跟车体验也进行了优化,面对不同的限速,调速也更加智能。甚至 nop 家的智慧和反应速度,有的时候可以规避一些危险时刻的到来。快来分享你家 nop 家最像老司机的高能时刻。即可参与未来官方深稿活动赢好礼!活动详情记得看评论区哦!

粉丝2721获赞5557
相关视频
 01:29查看AI文稿AI文稿
01:29查看AI文稿AI文稿未来娜普家领航辅助驾驶已经用了快两周,今天下下教你从零到一,上手熟悉如何使用领航辅助驾驶,开长途累了的时候用它不要太舒服。建议准新车主们先收藏起来慢慢看。首先我们要先在车机上调好领航辅助驾驶的设置, 第一个,驾驶模式一定要选择增强领航辅助,如果没有选择的话,是没办法接管方向盘的。第二个,变道确认方式选择,无需确认,打开后实现方向盘托管,解放双手。第三个,车速调节,我一般选择相对限速调整为零,这样可以保证在限速范围内安全自动驾驶,其他的就默认为车机常规操作即可。 然后就可以放心的开启领航增强辅助驾驶啦!导航提示,进入领航辅助路段后,按下 n p 按钮开启领航辅助自动驾驶。车辆自动接管方向盘和踏板,车道会显示天蓝色表屏会显示当前限速和领航速度,这时也可以手 手动往上或往下调节领航速度,车会根据与前车距离自动调节跟车速度,还会根据路况和导航路线自动变道和刹车,可以说是完全解放,收手收脚了。此时车辆虽然是自动驾驶,但是如果不把手握在方向盘上,车就会不时进行弹窗提醒, 这个时候按提示轻握方向盘即可。如果一直不操作,将自动退出领航辅助驾驶。如果车况复杂有并线的时候,建议大家退出领航模式。退出的方法也很简单,双手握方向盘,轻踩刹车 或者手动按下 np 按钮即可使用领航自动辅助驾驶开长途真的不要太舒服了!关于领航使用心得,欢迎大家评论留言一起交流,记得点赞关注哦!
2147开电车的夏夏 00:54查看AI文稿AI文稿
00:54查看AI文稿AI文稿自动辅助驾驶不等于自动驾驶,相信大家都关注到了最近未来汽车的新闻,事件的主角,未来汽车的自动辅助驾驶系统,也就是我们所知道的 nop, 全称为 nice, 是导航系统高清地图与内偶 pand 自动辅助驾驶系统的深度融合。说人话就是简单,帮你看看道路,分析路线,仅此而已,但你要把它当成了自动驾驶,那就大错特错了, 你可以把它理解为是一个司机助理,如果路线前方存在事故、施工区域临时封路等情况,请大家立即接管车辆。 总之,驾驶辅助开启要随时准备接管和制动,有类似功能的还有特斯拉、小黄汽车,各位车主一定要仔细阅读说明书,现阶段市面上没有任何一款量产车可以双手双脚解放哦,你学会了吗?
907好车主百科 00:36查看AI文稿AI文稿
00:36查看AI文稿AI文稿今天第一视角来告诉你怎么在未来免费品个老司机帮你开车。首先在出发前打开增强领航辅助功能,他会接管车辆方向盘,然后在设置里选择个性化的变道方式。 在输入目的地后, nop 家就会为你提供精准的领航功能。无论是国单的变道啊,还是精确的超车策略,借助阿提拉超感平台以及阿德尔超算平台的强大感知力, nop 家都可以让你轻松应对各种复杂路况。 对了,踩刹车或按下方向盘功能, lp 加就会退出接管,让你自由驾驶哦。怎么样?还有未来二代平台的车友们没有试过 lp 加的魅力吗?你觉得 lp 加体验如何?快来评论区告诉我们!
321蔚来上海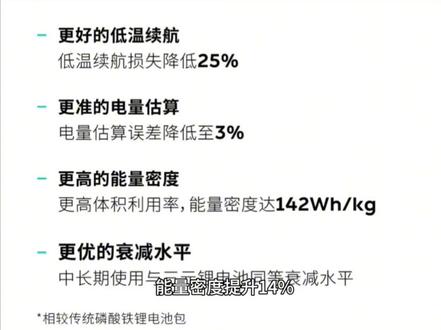 03:21查看AI文稿AI文稿
03:21查看AI文稿AI文稿未来有技术吗?这是很多人最常问的问题,那么今天我们就来看一下未来都有哪些技术。 六、中国首个领航辅助功能 n o p 二零二零年十月未来发布领航辅助功能 n o p, 成为中国首家自主研发并量产该项高阶辅助驾驶功能的车企。领航辅助 g w tim pile 是导航系统 高清地图与自动辅助驾驶系统的深度融合,在牛派尔功能以实现的巡航、车速控制、车距保持、 转向辅助和转向灯控制变道等功能基础上,支持车辆根据导航路径规划,在高清地图覆盖范围内的大部分高速公路、集成式高架路等路段实现自动进出匝道和切换主干道。此外, nop 还可根据道路限速和环境感知等信息,自动调 调整车速,智能变换车道,即超越慢车,从而实现指定路径下的按照导航路线自动辅助驾驶。 七、全球首个三元铁铝动力电池包二零二一年未来首创并推出三元铝加磷酸铁铝混合电芯电池包,成为全球首家将三元铁锂电池包实现量产的车企。针对标准续航电池包七十五千瓦时, 工程团队设计了完整的热管理软硬件体系,使得该电池包相比磷酸铁锂电池包低温续航损失降低百分之二十五。此外, 未来自主研发的三元铁锂电池包电量估算体系,结合了软件算法与硬件应用的创新,将电量估算误差降低至百分之三以内。该电池包还应用了新一代 ctp 技术,制造装配简化百分之十,体积利用率提升百分之五,能量密度提升 百分之十四,达一百四十二瓦时每千克,有效解决磷酸铁锂电池电量估算不准、整包能量密度低等问题, 把全球首个融合高性能激光雷达的智驾感知系统而归了。二零二一年一月,未来 et 七上市,成为全球首批搭载激光雷达的量产车。 et 七打破常规,首创了旺塔式传感器布局,将激光雷达布置于车顶前端,重新定义了自动驾驶时代的汽车外观设计。 et 七采用的激光雷达使用一千五百五十能激光波长,更高的输出功率使得最远探测距离可达五百米, 以人眼为研发灵感,仿生灵活变焦,成功实现定金凝视功能。此外,一体其搭载的超远距激光雷达,无惧逆光、低可见度等环境,能更稳定的监测目标。九、全球收款一体式 可体同轴感应电驱系统二零二一年十二月上市的 et 五,搭载全球首款一体式可体同轴感应电驱动系统,峰值功率一百五十千瓦,峰值扭矩两百八十牛米,最高转速一万六千转每分钟,是目前全球功率最大的偏置同轴感应电驱动系统。 这套同轴感应电驱动系统使用一体式押注技术壳体,将电机、减速器和电控模块三合一集成安装在一个壳体内,大大缩小了整机体积,减轻整车重量。值得一提的是, 这套全球首款铜轴感应电驱动系统还采用了未来独家配方的助力,转子电导率比行业提高百分之二十左右,相比上一代铜转子减重百分之五十,功率密度高达一点九五千瓦每公斤,远超同级别感应电区系统。
136蔚知加电 01:12查看AI文稿AI文稿
01:12查看AI文稿AI文稿老尼今天要挑战一天一千一百公里,在这么长的一个距离的驾驶过程当中,一套好的辅助驾驶系统就变得很重要。耶斯巴他标配了一套高阶的驾驶辅助系统,就是我们说的 nop 领航,他可以完成自动变道超车 啊,包括一些进出匝道的动作,他的减速弯道都变得比较自然。很多之前的这种驾驶辅助的话呢,其实在弯道里面的话可能不太靠谱,那这个呢,我觉得是比较安心的一个选择,那么 山洞的限速是低于我们高速一百二的限速的,那么如果你用领航辅助,可以保证你不超速啊,不吃罚单。我们今天出来的时候,途中有一段车祸,导致了差不多有五公里左右的一个堵车,以往的这种跟车,当前车起步的时候,你后车起步有的呢会抬头, 但是前车可能一走马上就停了,以后你要刹停他又会点头,但是他因为有了一套 iss 的智能舒适刹停的一个系统,哎,他的起步就变得很轻柔, 包括刹停的时候也很柔,基本上是无感的。这一段 lp 对于这种情况上面,他的起步和刹车非常自然,这是很好用的一个功能。
82老司机三人行 00:57查看AI文稿AI文稿
00:57查看AI文稿AI文稿同学们好呀,我是 l 老师,今天 l 老师教大家如何使用未来的 n o p 和 n o p 加。同学们要先在车机辅助驾驶设置中找到增强辅助驾驶这个选项,并选择该选项。然后我们就可以使用 n o p 和 n o p 加了。 在行车中开启 n o p 或者 n o p 加也很简单,只要点击方向盘左侧中心原点即可开启关闭,只需要再按一下,视频中就是我开启 n o p 的操作方法。这时肯定会有同学问,为什么我没有开启 n o p 加, 因为 n o p 家目前为止只能在高速或者城市高架路段使用,其余地方开启都是只有 n o p。 最后, l 老师提醒同学们,不管是 n o p 还是 n o p 家都是辅助驾驶,开车时还是要小心谨慎,安全第一。好了,今天课就到这里下课。
88李赟康Lyk 01:40查看AI文稿AI文稿
01:40查看AI文稿AI文稿最近几天,因盲目使用自动驾驶辅助系统发生交通事故乃至车毁人亡的案例比比皆是。在不少厂家和媒体夸大事实宣传这些功能的同时,我们却始终在提醒用户谨慎使用这些功能。 毕竟以现在的技术水平,驾驶辅助系统离真正的自动驾驶还有很大的差距,他们无法在缺乏驾驶员时刻监管的情况下真正保障用户安全。对此,我们在三十八号布置回平车节目中也做过专门的测试,对比了三家造车新势力最新版本的领航辅助功能,结果他们洋相频出,几乎一个都没法用。 当然,这也并不意味着自动驾驶系统在今后也永远不会成熟完善,但至少以当前的技术水平,一切打着自动驾驶擦边球的功能都不是真正的自动驾驶。如果一定要使用,他们请务必时刻保持比人工驾驶更加专注的精力, 时刻准备接管和修正车辆系统的错误判定和执行,把安全牢牢握在自己手里。毕竟,汽车厂家夸大事实宣传这些功能的目的,是为了强行拔高用户对于车辆的智能化印象。 厂家只会为自己的销量和股价负责,而不会真正为你消费者的生命安全负责,更不会为其他交通参与者的安全负责。最后,我强烈推荐大家去我们三十八号布置回民车节目观看。为什么造车新势力的领航辅助一个都没法用?这一期无论实测还是道理都讲的很明确,一定要看。
737838号车评中心 01:24查看AI文稿AI文稿
01:24查看AI文稿AI文稿继续聊未来的权益退货,这期聊一下 opplus, 也就是未来的领航副驾驶功能,从七月一号啊开始收费,价格是每个月三百八。先说价格吧,对于那些频繁跑高速或者城区高架的人来说,绝对是超值。 opplus 目前的水平已经是行业内比较领先了,而且几乎每个月都在不停的迭代。据说五月份啊, bv 上线开始不依赖高金地图,之后高速上自动进入服务区并换电,然后继续返回高速啊,也会上线,未来透露过很多次啊,自己的增驾驶技术储备啊,在行业内还是很领先的。 从今年的六月份半夜二点零系统开始啊,就会逐步的开始释放正驾驶相关的功能,比如召唤车辆到指定的位置,停场区内啊,人下车后自动的去换电等等。 今年下半年自动驾驶相关的功能的更新啊,节奏肯定是很快的,可能会让你不断的。哇塞,大家可以期待一下。那话说回来, nop 两年的使用权还是非常香的,因为两年后再付费啊,肯定是 nad 了,在 nad 完善起来, nopplus 已经覆盖掉了大部分的日常使用场景,大家都知道这些软件叠的都是有成本的,未来也不可能什么都一直免费啊,所以这个退货的政策啊,可以说已经做到了,对老车主有交代,对还在高的用户啊,能推一把,对未来以后的良性发展也是必须要做的。无论是三百八的 nopplus 还是六百八的 nad, 未来定的这个价格,肯定是有自信把这个功能做到远超出这个价格的体验好了,有对未来感兴趣的可以进粉丝群跟大家一起交流。购车的话也可以用我的邀请码领全额的积分,记得点赞加关注。
498Levi力外 02:45查看AI文稿AI文稿
02:45查看AI文稿AI文稿不得不夸一下未来的这个领航辅助驾驶,就是 nop 加,以前我们也用过别的自动驾驶,比如说特斯拉的 fsd 啊,那我感觉这个未来的这个 领航辅助驾驶还是比特斯拉的 fsd 稍微要好用一点,特别是配合了这个抬头显示,我们这台全新的 es 六,他是送了两年的 nop 家的一个体验。 nop 家可以实现什么功能呢?来跟我们说一下。就是跟特斯拉 fsd 一样的功能啊, 轻轻按一下中间这个按钮,领航开始就开启了领航辅助驾驶,他会道路自动居中,会跟随啊,也会自动换道,如果前面有车的时候,他会自动切换他中间啊,有一个抬头显示啊,这比特斯拉 看起来要舒服多了,你看现在当前面有车比较慢的时候,他就自动切换过来了,这个特斯拉如果要实现这个功能的话,需要多少钱?六万四, 那么这个是免费送的啊,对,感觉这个领航驾驶开起来怎么样?特别好用,也特别舒服啊,这一路过来将近两千公里,都是我一个人在开啊,轻轻的把手搭在方向盘上面,这个引领驾驶开启了, 就一路带我到成都,非常舒服。或者是以前这样开油车啊,这个绝对吃不消的,因为你要太多的精力集中在这个路况上面。 呃,还有一点就是这个引领驾驶啊,他比特斯拉要好太多了,我个人感觉尤其是在这样切换这个高速道路的时候,上下这个匝道的时候啊,特别的湿滑,特别舒服,你看 自己自动切换过来了,他是根据这个导航路线走的吗?而且到这个匝道上面啊,他的速度也是根据你这个匝道需求的速度,他自己在切换的, 看现在是右拐啊,这都是全程他自己在操作的,不是你切换过来的,不是我切换的。这这一直在引领驾驶这个地图上看得到的呀,匝道限速七十,他也开七十,看到没有?非常的稳,对,非常的稳, 这个你根本不需要担心你自己会走,走错了路啊,还有最最重要的一点啊,就是这个语音控制这一块啊,这个特斯拉真的没办法比着这个小糯米啊,这声音听起来是真的又舒服又亲切,而且是非常的人性化啊,示范一下。 嗨糯米在呢放首音乐,希望我挑选的音乐你会喜欢,就当你一个人在开车的时候啊,我相信你开未来肯定 比开特斯拉有趣多了,不会那么寂寞。为什么呢?因为你可以跟小糯米交流一下,嗨糯米还剩下多少公里?到终点还有一百零五公里,估计还要一小时二十分钟到终点,是不是特别的温馨?
1534金梁新能源二手车(梁哥搜车) 09:28查看AI文稿AI文稿
09:28查看AI文稿AI文稿未来的 nop 体验到底如何?全全开双手?完了完了完了,前面真的要堵车了,看看能不能刹住,现在九十多码,他的内饰充满了金钱的味道,哈哈哈,真香。 就在上个月,未来正式推出了 milos 二点一零点零版本的系统更新, 这个算是今年第二次重大的 ota 升级。在升级过后啊,他的优化提升主要表现在可以支持第二代换电站, 然后仪表可视化的效果呢,增强了以及更重要的,我个人认为啊,他的优化在于 nop 体验的升级。这条视频呢,我们 就重点来聊一下优化过后的 nop 领航辅助驾驶功能,不过在体验之前,我觉得还是很有必要。先聊一下我身边这台未来 es 六首发纪念版, 他这套设计经过了两三年的时间,我相信大多数的消费者呢,都是很认可的,比如说这个 x 八的设计语言, 以及这个分体式的大灯啊,看起来的确很有辨识度。他的侧面呢,你看这些线条,比如这个天际线以及这个腰线的设计,十分的流畅。更重要的 是啊,他的车身长度呢,超过了四米八,达到了四千八百五十毫米,以及车高呢,也超过了一米七。所以说啊,这台车的侧面看起来给人的感觉啊是很有气势的。还有一个值得撩一下的点,就是这个轮毂, 他是首发纪念版的这个标配,但是呢,如果现在的普通车型想要选装的话,好像是要添加九千五百块。他的这个车尾啊,看起来辨识度同样很高,特别是这个尾灯。首先啊,他采用了心跳式的设计, 同时融入了流水式的转向灯功能,所以说你在马路上看着这个他在转向的时候啊,哎,就肯定知道他是一台 es 六。如果说看外观你很难发现 现首发纪念版 es 六和基础版车型的差异的话,你只要进入车内,他这台车就会给你刮目相看的感觉,因为你只要放眼望去啊,他的内饰充满了金钱的味道, 真香,哈哈哈哈, 比如说这个纳帕真皮的材料二万五千块,十二个扬声器构成的音响系统六千块, 以及前面这个 ipud 抬头显示六千五百块,座椅通风、座椅加热香氛系统以及迎宾踏板处的迎宾灯等构成的舒适包 七千五百块,这个女王副驾哎,也要八千五百块,就连这个可爱的小猫咪也要四千九百块。 所以说啊,当你选装了一整套的这些选配之后,他的确能够给予你不一样的科技感和豪华感的体验。虽然未来 ys 六比 s 八要紧凑一些,但是他依然拥有二千九百毫米的轴距, 你可以看到他现在你看后排很多全,你可能说我的小短腿不是很明显,他能够轻松的满足秦老师的空间体验,你看很轻松的,所以说这台大五座 suv 的空间啊,是绝对没问题的,而且啊,你看这个纳帕真皮的座椅, 以及它这个松软的程度啊,的确有点大沙发的感觉,坐起来是很舒服的。未来 es 六是全球首款同时搭载了泳池同步和感应电机的纯电动 suv, 它的综合功率能够达到四百千瓦,以及它的最大扭距呢,能够迸发出七百二十牛米, 所以这样的参数下,他这台车能够迸发出四点七秒破百的实力,哎,那么他开起来究竟猛不猛,以及 nop 领航辅助驾驶究竟表现如何呢?我们开起来瞧一瞧。 就个人而言,未来六 os 二点一零点零版本的更新可以说是未来 nop 一个比较明显的转折点。 在此之前,你可以说未来 nop 偏保守,他会用罗米那种可爱的声音去掩饰他不乐意变道的做法,甚至你还可以用小鹏的 ngp 去压一压他。 但是你要知道的是什么呢?你要知道,经过了这次更新, nop 的变化可以说是脱胎换骨的,不信我们现在就来展示一下。未来 nop 功能的开启实际上是很简单的,你只要导导航到一个地方,然后他会自动的判断 进入了合适路段,就可以开启这个领航功能。这个合适路段目前指的就是高清地图覆盖的这种高速路、快速路以及城市高架桥。然后你可以通过方向盘左边这个按钮按一下, 他就自动进入领航功能。第一点就是动态仪表盘的增强,他现在能够显示装桶、行人、人行横道、自行车等物体, 而且他这个流畅度和 ui 设计都是很好的。嗯,如果遇到特殊情况,比如说前面一个大货车突然压线变道,他会自动把它标红,然后以示警告,这个我觉得很贴心。 第二个就是辅助驾驶的注意力监控,之前的版本他只是通过这个方向盘的扭力传感器来监控驾驶员注意力是否集中,然后升级过后,他把 驾驶员的视觉注意力和方向盘的转动进行了融合处理,这里有一个摄像头,能够能够对驾驶员的视线 进行监测,如果驾驶员的视线是一直放在前面的,手轻轻的搭在方向盘上, n o p 基本上不会弹出。嗯, 接管方向盘的指令,我觉得这个优化是很有意义的,就特别是对于老司机来说,他基本上是不愿意被打扰的。 你看刚才这个变道就很流畅,而且他还在一直的提速。 所以说,经过了优化升级过后,未来 nop 的这个变道的逻辑就是这个策略是进行了很大幅度的调整, 不管是在哪个车道上,只要他监测到前面的车速比较慢,他就会在十到二十秒内出发。变道的机制,呃,现在的变道会更加的积极, 同时你可以看到他现在变道的动作更加的干净利落,而且在变道的时候转向的幅度也更大了。也就是说,如果你想变过去的车道,后面有足够的空间, 呃,现在的未来 lp 将会毫无保留,义无反顾的选择变道。通俗来说,现在许多车企做自动驾驶,要么找供应商,比如说博士,呃,给你升级,要么就自己下定决心自己研发。前者的优势在于 研究时间短,成本低,后者的优势在于能够给用户带来更好的体验以及更快速的 ota, 但是将面临成本高,时间长以及对资金链挑战很大。很显然,未来就属于后者。 根据这两天的体验,未来 nop 在升级过后,他的表现更像是一个老司机了,虽然他也存在可以优化的地方,但是他的出现的确打破了自动驾驶领域的瓶颈, 这不仅是国内造车新势力的一次尝试,更是中国品牌对特斯拉自动驾驶领域地位的挑战。而他始终坚持自主研发的努力,也为体量更大的传统自主品牌做出了更好的表率。
49驾仕派 00:36查看AI文稿AI文稿
00:36查看AI文稿AI文稿未来车友们,你有没有发现在高速上纳布加不会主动变道,那是你的辅助驾驶有可能设置不对,点击小汽车图标,选择辅助驾驶变道,确认方式改为无需确认即可。另外,我也想问一下,你们有没有出现过, 在辅助驾驶跟随前车时,有时会加速跟到极限距离,然后又迅速减速拉开车距,搞得二排乘客晕车呕心。车友们,这种状况你们有什么好的解决方法吗?求评论区共享!
298士心闪闪 04:25查看AI文稿AI文稿
04:25查看AI文稿AI文稿这是二零二三年春季行业驾驶辅助体验啊!第三期,我自己的未来 et 七在此呢。我们首先要复盘一下两年前他的前辈 e s 八车型的 n o p 领航辅助的表现。 最令我们震撼的就是在领航辅助下,车辆居然会在匝道上自动走错路,导航向右他向左,同时很多进出匝道的处理也是极其危险的,属于根本无法用的玩意。 而到了两年后的 et 七车型上,硬件相比 e s 八时代呢,有了真的是跨维度的提高啊,包括像激光雷达啊,更多更先进感知单元 的应用和提升了上百倍算力的芯片,都赋予了 et 七几乎目前行业最高规格驾驶辅助硬件设备的持有者。此外呢,在前不久啊,也刚刚正式发布了新一代的领航辅助 nop 加的软件版本。 于是呢,我们就把它开到了与两年前和测试其他车型相同的路线上,看看当下版本的 et 七究竟表现如何。 先说优点啊,如果与之前的低配版理想幺二八和特斯拉摩洛三 fsd 相比呢, et 七当下的驾驶辅助功能总体上是要强大很多的,比如在跟车的节奏上,无论是高速巡航还是低速堵车,都已经非常柔和自然,在自动变线的路径上也很利落。 而最优秀呢,就是他在驶出匝道的路线处理上,不像许多对手和前面那样画龙,基本上一次就能够直接使上正确 的车道。以上这三点的处理能力,已经能够达到接近中等车技人类驾驶员的水平了。同时, dms 驾驶员注意力的识别和对于方向盘握力的识别也是极其灵敏,非常好提出明确表扬。 接下来呢,再说不足啊两点。其实当车辆准备自动向最右侧车道并线,进而呢,驶入匝道的这个过程,如果说右后侧具有同速度的社会车辆,那么 et 七会失去对于并线实际的选择能力。 此时啊,正确的处理方式应该是直接减速,把右后侧设备车辆放过去之后获得空档再进行并线。其实呢,就是 et 七啊,他也会自主减速并线,但前提必须是以较快车速扫过前方右侧空档时才会减速并线。 而当右后侧长时间具有同速车辆时,不知道啊,是因为视线被封锁,还是说判定逻辑的问题会导致车辆失去判断能力。其二呢,就是车辆在处理最复杂的车道河流时过于执着。 什么意思呢?就是其实啊,在复杂车流中进行车道河流是当下任何驾驶辅助程序都较难处理的工况。 对此呢,一些竞品呢,选择适时退出并交给驾驶员接管的处理方式。而 et 七呢,则会很执着地自行尝试处理。这虽然啊,在有些很短的连续河流场景能够惊人的自动完成, 但是呢,也会在遭遇速度更快的受贿车辆时,选择突然大幅自动 减速,这很可能呢,会给后方跟随较近的车辆带来预期以外的减速和事故风险。 总结下来就是,未来 et 七当前无论是在基础 l 二的表现,还是说在 nop 加领航辅助外加驾驶员注意力感知等方面,相比于两年前的 es 八呢,都取得了特别长足的进步,且当下的总体表现在行业中呢,也处于一个比较前列的水平。 很多方面的这种动作处理啊,已经很接近于说人类驾驶员了。与此同时,在一些场景处理上仍存在不足。 考虑到呢,他具有很高的硬件基础和在过去两年中呢软件上的快速迭代速度,我们有理由相信啊,在接下来的时间中,未来汽车会陆续推出更好的驾驶辅助版本乃至 nad 的全面交付。对此呢,我会在每个大幅更新的版本推出以后,都跟大家集 时测试,分享他们的表现,咱们一起期待吧!
31638号不只会评车 01:38查看AI文稿AI文稿
01:38查看AI文稿AI文稿在刚刚过去的二零二三未来科技创新日上,未来带来了智能驾驶方面的最新成果,全域增强领航辅助 opplus, 从高速到城区完全打通呼吸,大高清地图,没图也能跑,实现一个目的地到另一个目的地之间的高阶辅助驾驶啊,全国可用。未来提出一个心愿单的方案,目前仅限是未来班演,全系车型 都是新款的车主参加推送计划也很有意思。九月二十八号,符合要求的车主啊,在未来 app 上填写心愿单,十月 nop plus 开始提供服务。年底啊,会累计开通六万公里的城市之家路线,明年一季度抵呢是二十万公里,二季度抵呢是四十万公里, 这时候就完成了百分之九十五未来用户的领航路线覆盖。从功能上来看,未来的心愿单模式是官方帮你跑线路,然后等着开通就行。但未来真正要做的是路线共享,会线成网,也就是未来可以做到后台开路,不同用户之间的路线可以共享,最后汇聚成一个覆盖城市的治家路线的网络图。 所有用户啊,都可以使用,通过心愿单路线开通路线共享,会线成网,万人路网,基本就能超过高清地图覆盖全城的体验了。但这个方案背后的逻辑呢?个人认为是有一点纠结的。有未来希望推出更好的客户服务,用户在什么地方,我的支架服务就跟在什么地方,确保好用。这也使得用户体验和成本最低化,达到了一个比较好的平衡。 也有产品设计对技术能力的妥协啊,毕竟直接开成中国有三百多地级市,快速无族 noa 的难度啊太大了。 不过啊,从用户角度来说啊,就是无法得到明确能用的时间。目前公布啊,要开封的支架里程数都没有太直观的参考, 唯一的就是明年年终覆盖百分之九十五的用户,但极端一些,那百分之五的天选用户上下班路线应该怎么解决呢?那大家是怎么来看待未来痊愈增强领航辅助 nob plus 的推送方案呢?欢迎在评论区啊和我们交流讨论。
 19:23查看AI文稿AI文稿
19:23查看AI文稿AI文稿汽车的诞生,让手脚只需要几厘米的位移,就能坐在皮质沙发上日行其行。但即便如此,人类对于自动驾驶的想象也不会停止。 我们不断用科技重新定义着从 a 到 b 出行方式,试图让冰冷的机器把枯燥无味的驾驶总结成逻辑数据,从而自动驾驶。也许不久的将来,在车上盖着毛毯睡一觉才是通勤场景下的正经事。 司机这个有着几千年传统的职业,也将像马术一样变成一个小人 车。有人把它视作真 看作是产生情感共鸣的伴侣,无时无刻的都在享受着驾驶时和汽车沟通的乐趣。而更多的人则把它当做是从 a 点到 b 点的交通工具,他们恨不得把驾驶的时间和精力全都解放出来,去做一些他们看来更加有意义的事情。 然而,随着电计划的飞速发展,自动驾驶已经不再是科幻电影当中那些触不可及的概念。科技的变革正在把人们的想象一点一点的变为现实。 自动驾驶背后所真正蕴藏的社会价值也在不停的去敦促着所有的汽车企业们把他的革新提上真正的意识日程。 未来,一 s 八推送的最新的二点、七点零版本的 ota 升级,其重点正是 nop 领航辅助功能。 nop, 他其实是导航 系统、高精地图与 neo palette 自动辅助驾驶系统三者深度融合的产物。我们现在用的大多数地图都只能让汽车获取到主道和辅路这样比较粗线条的颗粒度较大的信息。 现在高清地图,他连车道线甚至是红绿灯的位置都可以精准的反映出来。我们来举一个例子啊。那么当你在高速上激活这个 nop 之后,这样可以根据路况自动的打灯变道,超越前方的慢车。不仅如此,他甚至还能够自动的下匝道。 如此接近自动驾驶的功能,是不是听起来非常有诱惑力啊。先别着急,我们当然要聊一聊它的原理是什么,然后再去体验。想要让机器做到和人一样去 自动直行加速、减速、变线、超车的动作,重要的第一步就是让汽车首先可以像人一样去感知我们身边的环境,也就是所谓的看到和摸到。让车看到我们的这个驾驶室的道路,并且能够判断车辆及周围物体之间的距离。做到这些,离不开的就是底层硬件的支持。 目前市面上具备 x 功能的汽车主要依靠三类设备,分别是摄像头、毫米波雷达和超声波雷达。三者在协同配合之下啊,相互弥补,却可以达到一个取长不短的一个综合效果。 我们先来看一看摄像头啊。未来 es 八全车总共搭配了八颗摄像头,分别位于前挡风玻璃上的三部摄像头和一个驾驶状态监测摄像头。四颗环式摄像头自动辅助驾驶呢,主要是依靠前面挡风玻璃上面的 三目摄像头,它是由广角镜头以及长焦镜头还有我们的主摄三者构成的。那么这个广角镜头呢,它的可视范围达到了一百五十度,能够探测到车身侧面短距离差距的这个车辆。 那么长焦镜头呢,他的可视角度是二十八度,那么负责这个识别距离比较远的目标,比如红绿灯啊等等这些。那么另外一颗素质最高的这个摄像头呢?他的可视角度是五十二度,车辆依靠他可以完成大部分路况的一个检测和实施的判断。 很明显,人用眼睛去判断距离呢,通常都是基于经验主义而得出的结论。那么我相信很多人即便是经过了专业的训练,也非常难的,能够时时的爆出自己和某一个物体之间极其准确的这样一个距离。而摄像头呢,由于他的成像原理和人眼是一样的,所以说其实他也有 人同样的弊病。那么如果想要做到保障行车安全和自动辅助驾驶机器,就必须要拥有一个实时测距的感知这样一个超能力。这个时候另外一个硬件就要闪亮登场,那就是雷达。 大部分消费者日常接触到的都是超声波雷达,也就是我们所说的倒车雷达。那么未来 es 八呢,全车总共配备了十二个超声波雷达。 思议他的测举原理呢,是由超声波发射装置发出信号,那么计算发射和接收反射信号时间的这个时间差来去判断他和物体之间的这个距离。前四 后四总共八颗雷达,其实已经足以应对我们日常泊车时候的这些需求了。那么另外四颗位于车侧面的雷达呢?其实另有他用,他的测距呢更远,但是呢,覆盖范围相对会小, 所以听起来依靠超声波雷达已经足以达到让车去摸到周围环境这样一个诉求。然而超声波雷达却有一个非常致命的缺陷,那就是慢。那么比如说当我们的车辆在高速行驶的时候,他的这个响应时间很难跟得上我们车周围环境的这个距离变化。 举个例子,一百二十公里每小时,我们在高速上去行驶,如果前车发生紧急制动,那么半秒的这样的一个雷达的响应的时间,我们的车在后面就已经往前行进了十几米了。也就是说这样的响应时间甚至还不如人的反应快。不过不要急, 传播速度和光速相同的毫米波雷达,则完全可以弥补摄像头和超声波雷达的致命缺陷。目前主流车载的毫米波雷达,按照其频率的不同,只要分为两种七十七级赫兹和二十四级赫兹。 那么七十七 g 赫兹的这个频段呢,是目前自动辅助驾驶领域里面应用范围最广的,他的检测距离超过了两百米,通常呢都安装在前方险杠上,正对着咱们车的行驶方向。 长距离雷达能够用于实现这种紧急制动、高速公路的跟车等等这些 a s 的功能,同时也能够满足自动驾驶领域里面对于障碍物距离、速度、角度的测量的需求。 么二十四级赫兹的这个频段呢,因为他的侦测距离相对来说比较近,通常是用于这个感知车辆近处的这些障碍物的 啊,他就像是车上的这个后视镜,他可以告诉行车电脑啊,后面没有车了,你可以去变道了。那么我们平时呢,开车变车道的时候,都是根据我们看到的信息,通过大脑处理过之后,做出一个决策,再进行这样的一个执行。好,那么汽车也同样需要这样一个 所谓的指挥中心。通过融合深度神经网络模型与这个专家系统,这个 nop 也可以跟人一样,短时间做出最优的这个换道角色。不仅如此,他还在驾驶过程当中可以不停的去学习,能够持续的对周围车辆的这个运动状态进行预测和这个跟踪,从而最大程度上呢保障我们的 停车安全。 ok, 我相信看到这,我们的网友应该对领航辅助系统的原理摸着七七八八了。接下来我们就一起上路来体验一下这套系统的威力。 好,我们正式试车之前呢,首先把这个车内的基本设置向大家介绍一下。如果你是台新车的话呢?在这个呃设置菜单里面的 ans 界面下面就会看到一个领航辅助系统,后边写了一个 bade 版本。 我们首先把它勾选点开。打开下面就发现有一个变道确认方式。那么他要提供的两种选择,一种是需要你确认,也就是说当他判断到周围需要你变道的时候,是否需要你人工输入指令变还是不变。 那么这个是有一个人的这个判断和安全保障的。另外一个选择呢,是无需确认,也就是说完全由这个车来自己判断是否符合变道的需求。那么我们现在来做测试的话呢,当然选择一定还极致的状态,算我们选择无需确认。 最后一个,这个纳米牌老提示我们把它打开。那么把这几个菜单勾选完毕之后,我们就已经具备了启动这个领航辅助的前提,那么我们刚才讲了一定要在导航的状态之下,所以现在我们导一个地理位置,我们先试一下。嗨纳米, 我在导航到 kk one, 我们去 kkomd 购物中心吗? 第一个哎,没错。那么当我们进入到这个路线规划的界面的时候,你会发现在中间呢有一个这个领航辅助系统的图标 可以看得出来。 ok, 他告诉你实际上在这整个这个路程当中有多少公里你是可以使用领航辅助的。滨河大道是整我们深圳的一个非常重要的一个城市快速路,所以我们现在呢就来开始试验一下。到了滨河之后就开始这个领航辅助功能准备走 这边有几个很重要的点,就是第一个我们要看一下他判断车道变道的,这样这个能力是不是强,并入主路,或者说直接下下大道的这样一个功能,他表现如何,以及如果有车是加三的话,他又会怎么办?所以他对于整个车的这个算法算力,以及他的这个硬件 匹配度对要求是非常高的。我们在白天测试的时候呢,呃,深圳的这个城市快速路啊,车辆还密集度还是蛮高的,所以说更加能够体现他的这个能力。麦当劳卡火车路段,现在这个导航上面呢,在这个插入口这个位置有这个 nop 的标志,就是过了这个位置, 我们直接点击方向盘上这领航辅助的按钮就可以启动这个点击他拍了已启动领航开始。这就体现出来他和特斯拉的这个自动辅助驾驶最大的一个区别在于特斯拉只有在高速上才可以使用,但是 呃,这个未来呢? es 八呢,是根据这个中国的特殊情况做很多针对性优化。再给大家介绍一个简单的小细节。比如我们这个时候在屏幕的这个左下方的区域呢,也有一个领航辅助的图标。这个图标呢,你在行 的过程当中,在他启用的过程当中,是可以点击进行临时关闭,强制性关闭的,给了你一个快捷的切换两种模式的一个入口。现在我们现在处在是一个跟车的状态,用到的应该是我前边这个,呃,七十七级赫兹的毫米波雷达以及摄像头。 这样我们把手放在方向盘上,轻扶着他,就可以看到前面有一辆大车。这个时候左边我们人判断是可以变道的。哎,你看他打转向减速变道, 而且刚才变的这一段还蛮挑战的,是因为他不是一个直线并线,是他有一个很小的一个弧度在变线。这个时候车况又很复杂了,右边有公交车和面包车,那么对于我们整个车辆对于环境的判断要求会更高。他到底是保守逻辑还是激进逻辑?那么激进逻辑会给 一种很紧张的感觉,他可能车速减的不明显,然后可能就直接冲那辆车去了。如果保守逻辑的话,他会提前制动,然后宁愿把速度降低一点,但是也不要离前车太近啊。这个时候我们右边又可以变道了, 如果没有判断的话,我们这个时候打转向灯,他就会进行变道。 所以我感觉他的整个这个变道的逻辑呢,相对来说还是比较保守的。一般像刚才那种情况,后车比较远的时候,我们可能如果是人类驾驶的话,可能直接就变道了。 这个时候他判断左侧可以有最佳车道,会比我们刚才那条车道要快一点点啊,他就变过来了,我们右边两条车道相对较宽,我们能不能变道 一下?哎,你看这个时候他刚才是红色的线来给我讲编造 证明着。就是说他判断后边有车快速接近的时候,他就取消了变道,这个时候我们在右转手动变道,看可不可以哎,可以,他判断可以前面,而且这个时候是有辆车在加塞的哦。 那么他整体来说,我的感觉是他跟车的功能已经非常完善了,就是说对于车速和车距的控制完全没有问题。主要是在变道这个点,哇,这个大车在打转向,在无限接近,我 还可以还有两公里下匝道了,我马上要向右面到了。 你看刚才他语音提示我说 还有两公里就要进匝道,所以说刚才我是在中间车道。那么他判断就是说当我有还有两公里下匝道的时候,就会比较积极的去向右变道,这样方便我们在行驶到出口的时候 啊,可以在最佳的位置。整体来说,他的风格还是非常稳健,比较踏实,比较稳稳重的一种调教的风格。因为比如说刚才对于环境的判断,如果稍有一些危险的可能性,他可能就会取消变道。另外一点的话呢,对于我们的这个出道口的这个 位置的判断,也是有提前预判,这个逻辑是合理的。哎,即将要变道,这个时候又比较激进了,右边还是有车的接近,但是这个时候就积极的变道到了辅路这退出领航,我们手动接管,所以我们开了大概这十几公 的路程啊。整体的感觉是,如果我你能够把我之前所讲的那个工作原理进行一些吸收和理解的话,我相信在你去试驾或者体验这款车的时候,你会明显的感受的到他什么时候什么硬件在工作。以他的判断逻辑,还有他的整个的调教的性格, 可以理解为就是说整个 nop 的这条系统呢,在变道逻辑上,一是考虑安全,第二就是考虑这个对于交规的这个遵守是非常非常严谨的。 在今天白天这样一个车比较多,路况相当复杂情况下,都是可以做出正确的判断的。所以说我觉得评价还是非常的好。接下来的话呢,我们就要去这个高速上去试验一下。嗨, nome 我在导航到福海收费站, 我们现在其实过了收费站之后已经进入到了这个 nop 的使用路段,我们现在点开正在识别车道。 哎,这个时候你看他的仪表盘,因为我们现在是日落的时间啊,所以能看得到这个天机线上面还有一个正在日落的一个动画,做的还蛮细致。那么这个时候你看你可以看到整个的 马路上的情况是比较理想的,车比较少,我们可以用一百二十公里定速巡航的方式直接去在这个高速上行驶。那么这个时候如果说我定速是一百二十公里,看他会不会判断超车呢? 是不判断的,就证明说未来可能觉得速度差不多了,没必要超车是吧。 我们再编到最右边去,编到前面的大车,后面跟着他的进度。 大家看到这个车前面变道的距离不够的时候,或者车速差异较大。哎。他这个刚才这个这个场景算法还是蛮有趣的。因为刚才这个大车的速度比较慢, 我们我打即便打捞这个转向灯,他发现你接近前车的速度呢,比较快。而我这个中间的剩余的空间呢,可能不足以让我平稳的平滑的变道的时候,他就会选择 不变道啊,有点意思。现在我们开始往右边变线用,车速比较慢,那么我们来打方向,抢着变线。好,现在他告诉你变线的这个路径是红色的,他不是去变,我们再变一下也是不是去变。所以就是说你不用担心你会误打转向灯,他会通过这个算法或判断失误。我们再变到最右边去, 跟到前面的大车,后车已经在自动减速。这个时候我们来看他做和反应。哎,即将变左,已进入推荐车道, 还是表现非常良好的,符合我们的这个预期。还有两公里下达到了,我马上要向右边到了。你看他提前提示你了之后,他就会非常积极主动的向右并线。 但是当你快要下匝道的时候,他就会适当的减速制动。然后呢,再去变线,那去保证你是在一直在最右的时侧的车道不会出现这种手忙脚乱,临时到了实线区域再去变道的情况。跟车的时候呢,他的这个 个呃速度和制动的两个控制还是比较柔和的,不会让你有临时特别明显的这种顿挫感呢。刹车的推背啊啊,整体来说舒适性也不错。好。现在我们到加大车已经在自动减速了, 而他识别出来,其实在这个弧度和曲率比较大的这种盘桥的过程当中,他并没有进行这个并线的操作。我现在手虽然方向盘没有使劲啊。然后进入到左侧可以汇入主路的这条车道之后,继续向前走。 在整个这个过程当中呢,因为刚才的情况有岔路,有盘桥,还有汇入主路后方还有车,相对来说是一个对于计算机来说是一个比较复杂的路况。当然我相信随着这个软件的不断的迭代和升级,尤其是这个,我们的车主们在路上 在进收集了更多的数据之后,这个算法也会越来越完善,越来越周全。我们现在开的这条路是深圳最美的高速,这个叫沿江高速,在海上架桥修建, 尤其深圳这一段非常的漂亮,能看到这个海天一线,落日余晖的感觉。右边就是浅海,非常漂亮的高楼大厦, 非常现在非常惬意的一种生活方式。我觉得这才是一个生活该有的样子。 可能在自动辅助驾驶这样的一个领域里,我们永远都无法看到那种期待当中的一夜骤变式的颠覆式创新和进步。但是作为一个热爱这个行业的人和 一个科技生活方式的忠实信徒,我们却可以不受约束的去大胆的想象和期待。就像十年以前我们对于智能手机所做的那样,在大胆的期待和想象之后,以高速摄影的慢动作去仔细的观察未来十年这个行业所发生的每一个点滴变化, 去收获十年之后那种风景,看透细水长流的幸福。 stay hungry 我希望对于未来的智能出行,我们都可以拥抱期待。 好了,本次未来 es 八的 nop 领航辅助功能的体验呢,就跟大家分享到这更多的科技生活方式内容。大家可以动动我们的官方网站,接着到炕去关注我们的官方微博,还有我们的官方微信公众号。 当然,如果你有更多的想法,希望跟我们一起分享你对于未来智能出行的一些看法,也欢迎你下载我们的社区 appz, 跟我们一起看。
48ZEALER 09:08查看AI文稿AI文稿
09:08查看AI文稿AI文稿哈喽,大家好,欢迎收看有价报道。我是蒋涛。我估计你们已经看过了未来 es 八的一个静态的体验。 ok, 那我们今天可以看一看这台车开起来怎么样了。 那首先在开之前呢,其实我还是有必要和大家介绍一下这台车做了哪些方面的一个升级。其实从 n p 二点零开始啊,未来干了一件非常厉害的事情, 就是他把底盘整个的空间通过一个 icc 的一个芯片,或者说这一个组件来进行了一个完整的一个统筹。那这样有一个什么样的好处呢?就是你整体包括底盘也是可以通过 ota 的。 再一个就是他整体在路面上开起来的时候,也是可以时时刻刻的感知所有的这些底盘的细节,包括你脚步的动作,包括刹车,悬挂等等等等各个部件的一些状态, 来时时刻刻的做出一个适应性的反馈。这样做的好处显而易见,就是可以让你的车开起来更爽。当然,大家应该已经看过了这个蔚来 es 六的一个试驾,当时我就说那台车开起来非常的有高级感。 那我只能说这台 e s 八在有高级感的情况下,还要再加一个更字。那这台车呢?四个车轮全部都是空气悬挂,而且是双枪空气悬挂,双枪弹簧可以让整个的可调范围变大。但是从本质上来讲, e s 八因为它的受众 其实是一个兼顾商用的一个状态,所以太过硬核。对于车长五米多的一台车来说,我觉得也不太合时宜。我今天试了几个驾驶模式之后,你会发现整体的底盘真的是非常的柔韧,他会给 整体我们车内的成员,包括和路面中间做到一个更好的一个隔绝感。这就很好的保证了你在任何情况下开这台车就是非常的舒服。尤其我们这又是一个二十英寸的车轮,轮胎的胎臂又本身很厚,所以基本就没有什么感觉。 那唯一能感觉到的是什么?就比如说路面有些坏井盖啊,或者有一些坑洼路面啊,这路面破损的状况,你会在车内感觉到一些颠簸,但是整体都是一个特别啊可控,或者说你会觉得很安心的一个状态。如果你开过那些运动车,然后你突然再来开这台车, 你会发现哇,其实一台舒适的车也是挺不错的。那么另外呢,这次整体的升级之后呢,你会发现他的驾驶模式是非常多的。现在这台车支持十种驾驶模式,那我只是体验 节能、舒适、运动和运动 plus 有运动加那这四种模式,其实它是一个循序渐进的节能模式,是最简单的一个状态,你会发现它就是动能回收也开到很大。嗯,然后同时呢,整体动力的响应呢,也变得比较弱一些, 对你脚步的细微变化,这台车的反应也没有那么积极。但是呢,你整体发现他在城市当中,即使你使用这个模式,也不会觉得说这是一台无力的车。 舒适模式是我整个试驾途中使用的最为频繁的一个模式,而且我感觉他也是最好用的一个模式,如一把热刀啊,切过黄油那样的一个丝滑的感觉。 那运动和运动 plus 呢?其实就是悬挂会稍微变得硬一些,感觉到这台车有一点点整整的那种感觉,但是又不会让你觉得这台车不舒适,这样 一个很好的分寸的拿捏。那么在整个日常驾驶的过程中,我倒觉得这台车没有什么太多让我吐槽的地方,或者说觉得大,觉得笨,这些都没有,只有一个情况下,我会觉得这台车有一点点笨重。就是比如说我们在酒店当中,我们需要拐弯啊,酒店当中有很多小路, 在这个时候速度稍微快一点,拐弯的时候你会发现哇,这确实是一台大车。之前的老 es 八我也有开过,那个时候就觉得哇,这台车真的是颠覆你的认知,一台四十多万,五十万的一个车,居然可以达到如此程度的一个高级感。那么到了这一代呢, 你会发现这种高级感进一步的被提升了。整体没有任何的可以吐槽或者觉得这台车不好的地方。 我们再来聊一下这次体验的 n o p。 其实之前在 e s 六呢,我们已经体验了这个 n o p 的功能,它的表现呢,还是各圈各电的,那这一次还是让人挺印象深刻的,因为天气比较特殊,厦门这边在下这个大暴雨, 那我也是第一次在如此特殊的天气使用这个 n o p 的功能,没想到在很多的细节方面的处理是要比人类驾驶员更果断的。 因为有了激光雷达,各种传感器的一个加入,其实一方面他能够看到的视野更广,再一方面呢,他对车辆的一个预判可能是要比人类驾驶员要更精准的。所以比如说你在看到他啊,并线啊,加速 这些动作,都是要比人类驾驶员要更激进更果断的。当然我说的这个呢,是他在动作开始 发起到这个动作结束,整个的这个过程中,你会发现他比较果断。但是呢,比如如果你在开始的开车的过程中,发现右边有一条车道,哎,其实那边可以更快,你在心中想,哎,他怎么这边可以并肩啊,他还没有病,但是过一会你再想的时候啊,他就病了。 所以他在判断的过程中,他是会比人类驾驶员要稍微的慢一点的。但是可以说的就是未来可期。 另外一点呢,就是今天在整个这个高速公路,他因为高速的限速是一百二十公里每小时,那即使是在这样的天气,他也同样是可以一百二十公里的速度来进行巡航的, 完全没有问题。整个体验过程中也没有说啊,因为天气不好,或者说啊,视线受阻,或者是因为传感器有污物来失灵的,或者中断的,整个全程都是没有的。所以这点 也是让我觉得非常非常 ok 的一点。那另外呢,在体验的过程中,比如说我们前方还有大概一公里左右就要下匝道了,那正好呢,前方有一个车辆正要汇入,那这个时候如果是人类驾驶员,可能我们发现右边有辅助车辆要并入的时候,可能我们一脚油门啊,赶紧过去, 这样可以保证我们更高的一个通行的效率。但是呢啊,对于现在这个智能驾驶来说,我们今天体验的过程中,如果有车辆混入的话,他会选择一个相对保守的减速的方式, 来让汇入主路的车辆并入,然后再去前方出这个匝道。所以在这些方面,日后还是有可以优化的位置的。其实整个的体验差不多就是这么多,那整体未来 e s 八给我的感受,我 觉得还是惊喜更多。一方面呢,整体他的底盘的质感给我留下了非常非常深刻的印象,以一个五十多万的车的表现来说,这是绝对绝对超出预期的。 另外一方面呢,无论是动力,这台车四点一秒可以破百,而且官方刚刚给我们讲课的老师还在说,这个四点一秒是非常非常保守的一个数据。所以我猜测啊,如果换到更好的轮胎,或者是天气状况比较好, 地面的附着力也比较好的话,那这台车有没有可能是一个四秒冒头的一个状态。那刹车性能呢,也非常的不错,大概是三十四点三米。而且呢,可以保证 十次连续的这种制动是没有任何衰减的。那对于我们消费者来说,一方面安心感会更强啊。再一方面呢,这台车 动力的储备我觉得也够大家玩了。 什么样的人适合买这台 e s 八呢?我觉得一方面,如果你对于家庭,每个人都需要做到更舒服,在一方面呢,你还需要有一定的商务接待的场景, 那我觉得这台车是 ok 的。再一方面,你个人认可整个未来的这个可换电可充电的这个生态啊,同时对这台车的设计啊,做工啊,用料都是非常在意的,那这台未来 es 八真的值得你选择。 然后我在静态的时候就说了,如果愿意车辆更帅的话,那你可以选择二十二英寸的那个轮子啊,如果想要这台车坐上去更舒适,我觉得现在我们开了这台二十英寸的车轮就可以了,而且它的续航里程也是 ok 的。那么除此之外呢,还有一点可以跟大家透, 就是目前其实有两款电池可以选,七十五千瓦时和一百千瓦时的可选。那么应该在今年晚些时候啊,或者是具体不知道什么时间还没有说。 还会出一百五十千瓦的一个电池包。现在能选的话,我觉得一百五十千瓦那个电池包会让这台车拥有一个更长的更好的一个续航,也让这台车具备了更好的一个出行的能力。 那如果只是在城市当中使用的话,其实七十五千瓦时左右我觉得大概起就够大家用 啊,如果是兼顾一下中远途的一百千瓦是可能是一个更好的选择,当然会贵很多了。好了,这就是本期的有价报道啊,欢迎大家在评论区后啊留言互动,我们下节目再见,拜拜。
547有驾原创 16:00查看AI文稿AI文稿
16:00查看AI文稿AI文稿六月中旬,我们在上海体验了未来的城区领航。 nop 家作为城市点到点的第一个版本,当时的系统呢,依然集于高京地图,整体的感知能力不错,但有不少细节处理的不好。 时隔三个月后,在 new 印未来科技创新日期间,他们邀请我再次体验城区领航功能,并且是无高清地图的方案。 同时在 new 印上,未来宣布了一套有别于友商的独特开通计划,不是按城市数量,而是按照道路进行覆盖。那么本期节目我将尝试回答两个问题, 未来的无高境地图方案,他的能力到底行不行?按道路覆盖的全域 op 加到底算不算通勤模式?那这也是全网首个系统性的解读。强烈建议你看到最后, 在回答未来的无途到底行不行之前,我们还是绕不过那个话题,怎么证明他没用高净地图?我们试驾的起点在上海安亭汽车创新港,终点在昆山市区。安亭是有高净地图的,这里是上海自动驾驶示范区之一, 而昆山理论上是不会有高净地图的,所以我们的这条路线将会经历一次有图到无图的切换。有高净地图,车辆将获得超视距的感知能力,只要地图数据不出错,就能做到更好的规划。 比如像下面这个画面,导航提示前方路口左转,而我就行驶在最内侧的车道上。通常情况下,我应该跟着前车走到路口完成转弯,而 es 七却在接近路口时走到了直行车道上,随后 他又打左转向灯,回到了内侧车道。这个操作当时就把我整蒙了,刚才导航信息是给错了吗? 我一度以为是导航规划错了,直到我看了车顶的七位回放,才知道冤枉了他。原来 es 七向右打是为了避开掉头保护区,而标线呢?被前车完全遮挡,我在车内看不到 前车违规压线,反倒是 es 七提前获知了高京地图数据走对了。这就是高京地图的魔力,即使在标线完全遮挡的情况下,只要数据没错,就能做出正确的规划。而没有高京地图,车辆就必须按照实时感知来规划 未来。也使用了行业通行的方法,看标线,看地面,箭头、看交通灯,并参考导航信息。比如下面 这个前方路口左转, nomi 却提示我,手动转向线的行人也是绿的,请手动左转。还有这个左转啊,好像不行,以及这个右转 未来全脚枪了。再仔细看一下,这几个路口有什么特点,是大路口吗?似乎不是。标线被遮挡了吗?好像是,但人家小鹏华为遮挡了也能开。 我们把这三条车道拼到一起,发现共同点了吗?前两个路口是没有箭头的,而第三个右转箭头应该是被抹掉了。而有箭头的路口,即使标线遮挡,车辆呢,都能顺利完成转弯。我不知道其他家的无图方案能不能过这样无间 箭头的路口,在昆山的朋友可以试试。在无图的方案里,车辆所依赖的最高权重就是箭头,没有箭头,未来在路口能直行,但不能转弯,需要用户接管。似乎呢,也说的通,那你们接受这种接管吗?接受的扣一,不接受的扣二。 至少以上三个路口表明在昆山这座城市里是没有高经济图的。而且我们发现,箭头通常是系统发起变道的时间节点之一。比如这次在减速, 他可能想往右走,因为前面要右转,他提前转了,以及这一次前面是直行。呦哦,看到了,看到就发起。而在箭头被遮挡的时候,系统呢,会比较依赖导航给到的提示信息。就像这一次前方拥堵, es 七快速做了向左绕行的规划,但左侧有连续车流,缺少变道机会,只能取消继续跟随前车。诡异的是,车辆开始打右转向灯了, 要知道右侧可是一排栈道停车啊!原来是导航提示前方两百多米要右转,所以接下来就出现了一个奇怪的场景, esc 打着右转灯完成了一次向左的绕行。 哎,你还别说,这个绕行处理的还相当不错的。 绕过前车 e、 s、 c 还是想并入到最右侧,迟疑了一秒,发现这条路应该都是占到停车才继续向前。我们还发现, e、 s、 d 上的引导线在有图和无图时也会发生细微的变化。灰色引导线呢,代表长城规划,而覆盖在上面的蓝色代表车辆将要执行的轨迹。你会发现过无图路口时,蓝线会收缩,说明车辆在控制车速观察。而有高清地图的路口, 好家伙,蓝线直接穿过了路口等待的前车,这也太自信了吧,有地图,整个轨迹线都是很自信的, 蓝色都看不见了,都打出去了。我们发现,未来当前的这版系统,即使在无途时,也能很好的执行道路规划,比如这个下闸的后的路口车道、河流, es 七能及时并入直行道,还好这是一个 直行右转,如果这还是一个右转,我们变道的空间就消很多了, 并在四变二的路口收窄中通过,适度挤压左侧车辆完成汇入。另外在直行过路口时,如果当前车道较慢,会在路口直接规划超越变道, 那当然也有做的不好的时候,比如车速的控制,我们体验的这一版提速呢,相当激进,老司机们都明白,踩油门呢,不代表真的快,选正确的路才会真的快,所以系统有时候呢,就会坑了自己, 导致错过了变道机会,你这不就把自己给坑了,这个,哈哈,你冲那么快干嘛,是不是?还有就是对停止线的强迫症,必须要停在某个固定的范围,导致停车的过程中就总会慢慢的往前溜。 哦,还挺准的啊,咱也不是考科目二,真的大可不必。而城市场景的另一个难题,红绿灯未来也会采用一些看灯的策略,在前方被卡车遮挡时呢,会采用减速拉开距离看灯, 如果捡到低速依然遮挡,在有条件的情况下会通过并线让出视野。比如这一次前方卡车呢,在减速, es 七的车速呢,已经降到三十多, esd 上的灯控呢依然还是灰色,此时再减速就会有追尾的风险。所以系统呢,选择向左超越,车头露出的瞬间读到了绿灯信息,加速视力。 对红绿灯的停止关系呢,也会遇到一些 commun case, 像这次突然的刹车,就是绑定了红绿灯和停止线的关系,把 路中间的接缝呢看成了停止线,再加上前方正好红灯,所以无刹了,那这些问题呢,还需要继续的优化,那无高精地图的未来城区 op 家的能力到底怎么样呢?我只能说还行,大部分开的不错,还有一些工程问题需要解决, 不过这一次他的某项能力还是给了我小小的震撼。熟悉我的朋友知道,我是不会只跑官方路线的,所以到达终点后,我向副驾的未来同学哈瑞提了个需求,能不能让我在昆山随便跑?于是我们找到了这样一条路, 能开启吗?可以开启喽,我们挑战一下昆山的小路。这是我给哈瑞提的一个小需求啊,他蛮多了,哈哈哈。在没有标线的小巷子里,只要一侧有路沿 或者有线领航功能呢,就可以激活。在缺少导航信息限速牌的情况下,车速会默认为六十公里。为了保证安全,我手动将车速降到了四十路口有过马路的行人, es 七减速观察, 左侧是两个外卖小哥, esc 轻打方向通过,他看到了他稍微往右打了一点,出停车位的奥迪减速跟随前车继续又是对向自行车向右轻打避让, 注意看,前方出现了一辆三轮,左侧呢还有电动自行车,行驶空间很极限。 es 七能过吗?哦,这个这个这个啊,车道绕行往左打 哦,右绕。哦,可以啊可以啊, 这个路口左边有自行车,看到了这刹车点的好啊。由于到达目的地系统呢,在避让路口行人后退出,领航结束,我们设置了新的导航点,让他跑完这条小巷,领航开始。 面对栈道的面包车, e s 七依然有绕行的意图, 面包车驶离,继续跟随,此时我的视线呢,已经完全被这辆依维克遮挡,但面对突然出现的逆行自行车和栈道障碍物,系统依然能够做到 轻打方向避让游刃有余。往左打了一点,绕, 往右打躲,刚才那个自行车 飞客呀,太高了,所以我们看不到。前面的路口信息都被遮挡了,但是他整个的使感知的动作还是挺快的。 来到路口左打避让,拉货的三轮注意看管子呢,已经伸到了外面 路口,行人减速,我们有路权继续行驶,缺少绕行空间, e s c 就选择继续跟随。三轮车突出的障碍物虽然没有显示在 e s d 上,但感 是抓到的,保持了一个相对安全的距离。三轮靠边停车绕行成功,有绕行动作,绕了一下横穿的摩托车, 来到路口,箭头呢是一个三向行驶,我原本以为 e s 七会卡住,但没想到他沿着右侧的空间走到了路口, nomi 提示要我接管等灯的车手动右转 啊他,他让我右转,应该是系统不认识这种箭头。我在想如果直行的话,他能完成吗?那我们就再试一次。 原来直行是可以走的,跟前面说的一样,只是路口 口的左右转要人来接管,咱们继续新选的这条小巷呢。道路两侧加了黄石线,只要空间足够, es 七依然能够顺畅的绕行,横纵配合的很好,没有那种点头的刹车情况非常的丝滑。 而面对这种三轮车卡在中间,系统无法压黄石线的情况,需要接管,他现在会把黄石线认为是车道方向的分隔。 ok, 过了还挺极限的,贴的挺近的,贴左边车这边有逆行 叔叔阿姨。我们面对栈道的对象,行人在没有空间的情况下,会等待 行人驶过车头,马上接续起步,等他们过去再走。你们觉得这绕行能力怎么样?归在行业前三名不过分吧? 那通常播到这呢,我们的节目就结束了,但我还是想解答那个有争议的问题,未来的开程方式到底该怎么看?与小鹏、华为和理想的开程方式都不同,未来没有选择按照城市数量开程,而是用道路为单位,提出了城区的领航公里数, 年底六万公里,明年上半年完成四十万公里,百分之九十五的领航覆盖。用户以心愿单的形式提交你想要的覆盖路线,这些数字呢,没有感知,好像并不多。有人会讲,提交路线不就是通勤模式,但如果看实线的路径和 通勤呢,又不太一样。用户提交心愿单的方式呢?就像是提交换电站的心愿单,而收集的目的实际是帮未来框定开放的范围,用户是不需要自己去学习路线,也不需要在车端本地存储路线的。其实热区呢,不用心愿单,未来也能拿到。 未来科技创新日上日少清演示的上海一万名用户的路线覆盖,其实就是用户车端跑出来的。我们实跑的昆山地区也不是来自于信念,单看看这座城市的换电站覆盖,你就能明白,这里的未来保有量不低。 那为什么还要做心愿单交叉验证呢?这就是未来的企业风格,听用户的。如果出现用户选择和热区不匹配,也会倾向于按照用户心愿单开放,所以你能明白吗?就算 没有心愿单,全域 nop 家还是可以按照用户实跑的热区框定范围开放系统。而像昆山,我们实地跑的这些路,你们觉得算开城算通勤还是算什么?反正未来只把它算到了公里数里。最后说说 ntr 标配的四颗奥润 x, 这一直是外界批判未来的地方,徒增成本,人家两科能做的,你为啥要上四科?在科技创新日上,任绍兴正式解答了第四科 oran x 的作用, 群体智慧。看到这呢,应该还会有人说画饼和扯淡,但未来是这么想的,也是这么操作的。比如用户的热区路线的鲜艳信息,并非是官方采的,而是来自用户车队。而后续的验证呢,也不一定是官方的测试车队, 用户车队同样可以进行验证。如果没有这颗奥润,你就只能通过点击某个开始学习的按钮,告诉系统,我要跑了,你得学习了。正是因为这颗单独的芯片,让 ntr 平台具备可以随时全量进行数据验证,并且有算力,能在本地完成模型的大部分训练。 不可否认的一点,进度上未来是落后于头部两家的,但这一次无土版本的试驾,我能强烈的感受到未来能力提升的加速度。 其实对于车主来说,覆盖率呢,是非常重要的一点,明年二十季度完成百分之九十五的领航心愿单覆盖,你们觉得这个水平怎么样?非常期待在评论区看到你的想法,那受时长限制,关于未来的世界模型、算法框架,我会找机会单独再做一期视频,如果不想错 效果,也请关注我们的频道,你的支持对我们来说非常重要。我是大雨,我们下期见。
2407电动知士




猜你喜欢
最新视频
- 1162正经迪吹