40种巧妙的伸缩机械结构动图
i 啊啊 啊 you are。

粉丝1503获赞6357
相关视频
 00:10
00:10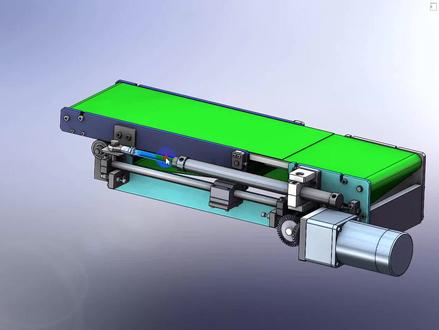 04:26查看AI文稿AI文稿
04:26查看AI文稿AI文稿这是一款伸缩的一个皮带机的一个设计,首先的话,我们啊伸缩的方式呢,是采用这个气缸啊,实现一个前后的推动,然后的话导成啊,这边导向的话是两边的一个直线轴承 好,然后他的一个,呃,皮带的一个驱动的动力呢,是采用这个电机,然后啊通过这个锥齿轮传动的, 好像这么一个结构的话,在设计当中其实最重要的是我们这个皮带在伸缩的时候,哎,会不会拉长,对不对 啊?这一点很重要。好,那么我们来看一下这边的话有这个系统课程啊,包括我们那个自动化计算,对不对?各种齿轮链条啊,滚珠四缸,包括气动,包括电机,各种电机,各种 啊肘啊啊,还有这个亲子团队接受处理,还有这个啊材料历史方面的,还有各种的一些安利设备好,然后这边的话 辅助工具啊,包括我们这个视频模型啊,以及全套的一些辅助工具。自自动计算的,包括气缸,电机啊,齿轮啊,还有各种的一些结构的,然后还有一百本书籍啊,自动导出以及这个设计工具等等啊,三千套设备模型。然后 后呢有这个每周更新的一个,呃,四本模型,动画园图加上啊杂志模型以及这个 a 啊,机械 b, 还有 agb 小车。 好,那么我们来看一下啊,首先呢我们来看到这一个啊皮带,为什么说我们啊前后推动他不会出现这个拉长的一个线相带好,他其实在做的时候我们要了解到这个绕线的一个问题啊, 我们来看一下这一边啊,编辑一下这一个特征啊,这个是我们绘制出来的一个,呃,这一个,呃,这一个,呃原理的。好,那么 来看一下,首先这边是我们气缸的往前面推好,那么往前面推的时候呢?这个皮带的话是在往前面拉的的,往前面拉的好,拉的时候大家可以看到皮带并没有发生什么样的一个长度变化,他其实很像一个抽屉刀嘛。啊,这个位置的话,他是一个什么呢?就是一个抽屉带 啊,这个抽屉,而前面的话只推进去,然后拉出来他的长度是不会发生变化的。好,那我们来看一下啊啊,在推的时候大家可以看到我们其实推动的是这个滚轮,对不对啊?推动是这个滚轮,然后呢啊这个皮带的话类似折进去了一样, 就上面一层,下面一层的。好,那么推出来之后呢,大家可以看到啊啊内饰,我这个皮带的话,是啊把这一层书啊推出来了这么一个情况啊。好,那么我们来看一下它里面的一些结构啊,啊,它里面的一些 结构的话,首先呢啊他的一个情况,我们把它隐藏一下啊。好,这边是我们这个皮带隐藏着,大家可以看到,其实我们推出来拉出去的时候,这一块是我们这一块啊支撑板的。哎,他那是一个抽屉,他先伸进去的,对不对啊?伸进去的,大家有没有发现 啊?收,收进去的好,推出来啊就推出来了啊,整体这么一个情况。好,后续的话,我们啊在做的时候,底下的话是做的一个啊,这个滚筒的一个支撑,对不对啊?然后实现一个导向啊,里面的话底下这个的话是做一个橡胶的一个滚轮就可以了。好, 后面的话这一边呢是做了一块螺丝,然后后面呢这一方的话是做了一个限位的啊,通过这个螺丝的话可以限位,然后呢啊前后运动的时候这边的话也有一个也有一个缓冲器,大家可以看一下这边有个缓冲的啊,上面这一方的话是可以限位的啊,所以说我们缓冲限位也可以 实现他伸缩的一个定位啊,伸缩定位啊,好,后面的话我们啊在做的时候呢啊,他这一边啊整体的话啊还要了解到就是我们这个绕线的问题啊,绕线的话我们来看一下咬咬这个什么的,咬这个滚筒袋啊,首先的话我们在咬的时候是这样子的啊, 啊,这边一个滚筒呢啊,通过这一番咬到这一番来。好,那么我们来看一下啊,这一边咬到这一番来呢, 好,这个滚筒的话就是前后推拉的一个滚筒,你只要把这一边哎往后拉对不对?就实现了一个收缩往这边推,哎,他这个皮带就很啊啊,就会推出来就会拉开啊,就很像一个抽屉对不对啊?抽屉啊, 好,那么在做的时候他的表现方式的话,这样这么一个情况 啊,这么一个情况呢,大家可以看一下啊, 好,就这么一个情况对不对?所以说我们在使用当中的话,相对来说你只需要啊把他的一个皮带的一个路径绘出来就 ok 了。好,整体这么一个情况,感谢大家观看。
1338非标机械设计学习 04:50查看AI文稿AI文稿
04:50查看AI文稿AI文稿这是专门为机械爱好者准备的一条减速带,对于喜欢机械原理的小伙伴来说,这一期绝对是福利。本期视频我将一次性带你认识十六种常见又经典的机械结构原理,从运动方式到核心逻辑,全都给你讲的明明白白的。看看这里面有多少是你真的理解过的。 先来一个最反直觉的,军力圆锥轮和发条和机构。发条越松力越小,这是常识,但这个结构偏偏不按常理来, 通过一个精细的锥形轮廓,把发条忽大忽小的力硬生生拉平,让输出转速始终稳定。早期机械钟表就是靠它才能一分一秒走的又准又稳。再看所有机械都绕不开的摩擦离合器机构, 一个杠杆一推一拉,两片半离合器要么紧紧咬住,要么干脆分开。它最厉害的地方不是接上,而是接的很柔,没有顿挫,一旦过载,它还能主动打滑,相当于给整台机器加了一道保险。接下来这个万向节机构你肯定见过,它也叫虎克角。 你看中间的十字轴,把两个叉形零件连起来,能在大角度偏转的情况下稳定传递旋转动力。像汽车的转动轴,工业机器人的关节里都会用到它。 再往下是一种看起来简单但特别聪明的摩擦槽轮转动机构,也叫摩擦式带轮转动, 没有齿轮,全靠两个带轮槽面之间的摩擦力来传递动力。这种结构过在石会打滑,能保护其他零件不被损坏, 还能在一定范围内缓冲和吸震。如果你追求干脆利落,那就看这个柱销孔离合器通过侧面的拨杆,可以让红色带柱销的半离合器和蓝色带孔的半离合器结合或分离,从 从而传递或切断动力。这种结构简单可靠,特别适合需要快速切换动力的设备。再来看一个节奏感极强的混乱星轮机构, 你看红色小齿轮带动蓝色星轮转动时,星轮里的滚子会在不规则槽里运动,让星轮的转速忽快忽慢,能实现间歇或者变速的旋转运动。 很多包装机仿制机械就靠这种非规律来完成复杂动作。说到切换动力,还有带齿轮驱动的爪式离合器盒。画面里的红色和蓝色部分是两个爪型的离合器半 体,通过侧面的小拨杆可以让它们裂合或者分离,从而传递或切断动力,把它升级一下就变成了双离合器。追齿轮幻象机构通过中间的拨杆切换左右两个离合器的裂合状态, 就能让输出轴实现正转、反转和空挡三种状态。这种结构在机床车辆的变速箱里比较常见。再来看吉轮和追齿轮机构, 你可以看到红色吉轮和蓝色追齿轮裂合能把动力转九十度方向传递,同时红色吉轮配合侧面的棘爪,还能单向锁止,防止反转。 而锥齿轮与螺旋柱箍轮机构就更有意思了,红色的螺旋柱箍轮转动时,上面的箍钉会沿着蓝色锥齿轮的锥面螺旋线运动, 从而带动锥齿轮转动,能在传递动力的同时改变船动比或者运动方向。如果你觉得还不够复杂,那就看局部等速变速齿轮。 同一个齿轮,一部分齿是标准键开线保证匀速。另一部分是特殊齿形,让速度发生变化,也就是说一圈转下来,有的断匀速,有的断加速或减速。这种混合节奏专门用在高精度专用机床里。再看斜齿正齿轮机构,你看它的齿是成 v 字形的左右螺旋齿拼合而成。 这种设计能抵消单侧斜齿轮产生的轴向力,让转动更平稳,承载能力更强。在重型机械,比如船驳矿山的变速箱里用的比较多。下面是芒果轮和小齿轮的组合机构。蓝色的异形轨道盘就是芒果轮,当它旋转时, 轨道会推动红色小齿轮既自转,又沿着轨道做行星运动,把连续的匀速转动变成小齿轮的变速旋转。这种机构最早是为了钟表设计的,现在也会用在需要特殊变速规律的玩具或自动化设备里。接着是一个以柔克刚的摩擦滚子多齿轮机构, 红色摇臂上的滚子靠摩擦力带动蓝色大轮转动,摇臂转一圈能让大轮转过多个齿,转动比很大, 还能在过载时打滑来保护零件。然后是一个空间转动高手观齿轮与直齿轮机构,你可以看到红色的观齿轮的尺是轴向突出的,能和蓝色直齿轮在空间里实现九十度的垂直转动。这种结构常用来改变动力传递的方向, 像汽车的差速器、机床的进给装置里,都有它的身影。最后压轴的是太阳轮和行星轮机构。你看红色的太阳轮固定, 蓝色的行星轮在绕着太阳轮公转的同时,还会自转。外圈的大齿轮会跟着行星轮的轴一起运动,能把行星轮的复合运动转化成外圈齿轮的连续转动。 这种结构最早是瓦特用来改进蒸汽机的转动系统的。如果你发现这些结构你以前都见过,但今天才真正看懂,那看完这条视频就值了。
2611机械视界 03:05
03:05 02:46查看AI文稿AI文稿
02:46查看AI文稿AI文稿伸缩式起重机是如何将吊臂扩展四到五倍的?随着长度的增加,它又是如何在保持承载力的同时,吊起非常重的重物的?普通的液压千斤顶最多只能扩展到自身长度的两倍,再长就不行了。那起重机是如何突破这个限制的?答案其实就藏在它的内部。 它并非只有一个液压缸,而是搭配了一套巧妙的锁定机构。这套锁定系统其实并不复杂,但在讲原理之前,得先认识一下起重机的几个关键部件。这个是主体,伸出去那一大截是吊臂,吊臂的每一截都称为伸缩节,这是操作室负责控制整个起重机,还有一个核心部件 叫举升油缸。吊臂内部其实藏着一个液压缸,这个液压缸的长度经过精准设计,不长不短,刚好和吊臂本身差不多。每一节伸缩节都和这个液压缸连在一起。 工作时,液压缸会先将第一节伸缩节推至最大行程,等推到顶不能再移动的时候,就会把第一节和第二节伸缩节锁定,然后液压缸自身缩回到初始位置,再去推动第二节伸缩节。同样,推到极限后,直到所有伸缩节都伸展至最长。 那吊臂伸出去之后该如何收回来呢?显然不能直接去拉第一节伸缩节,因为液压缸根本够不到那么远, 所以他的收缩逻辑与伸展正好相反。先将最外侧的第三节缩回来,然后移动液压缸,接着收缩倒数第二节,重复这个过程,直到最后一节伸缩节收回。整个收缩过程与伸展过程完全反向。这种伸缩是起重机吊臂最长可伸展至两百米左右,液压缸上设有两个端口, 通过第一个端口往里面输油压,液压缸就会缓慢伸展,直到达到最大长度。等需要收缩的时候,通过第二个端口施加油压,液压缸便会缩回到始位置,反复操作就能实现吊臂的伸缩自如。 不过这里有个关键问题,这么大的油压是怎么产生的?这就不得不提到一个物理原理了。帕斯卡原理,在密闭流体中压力处处相等, 小活塞上施加较小的力,产生的压力通过流体大小不变的传递到大活塞上,由于大活塞面积更大,因此能输出更大的力,这就是帕斯卡原理的神奇之处。起重机就是利用这个原理,通过电动泵产生巨大的油压,再把这个油压传到各个液压缸里, 既能轻松推动伸缩节伸展收缩,也能吊起沉重的货物。除了这种常见的伸缩方式,还有一种链式吊臂升降机结构。在这种设计里, 油缸是反向安装的,这样就能把第二节臂装在油缸壳体上,不用在第三节臂上打孔,更方便也更牢固。链条会固定在第一节臂上,绕过和第二节臂一启动的滑轮,最后固定在第三节臂上。但链条只能承受拉力, 所以还得有另一根链条绕过第二节臂后面的滑轮,专门负责把第三节臂拉回来。这样一推一拉,就完美解决了吊臂的伸缩问题。
1324知理科普 02:40查看AI文稿AI文稿
02:40查看AI文稿AI文稿我们的人体共有六种可动关节,他们分别是脚链关节、车轴关节、球窝关节、椭圆关节、安撞关节以及平面关节。脚链关节结构简单,只允许一个轴向运动,其结构阻止了像这样旋转, 也不能像这样旋转。一块骨骼的头部包裹住另一块骨骼的圆柱形头部,形成了非常稳定的旋转轴。就像这样最典型的例子就是肘关节,这是区区以及伸展 书。轴关节也只允许一个轴向旋转,但它是绕长轴旋转的。圆柱形骨骼嵌入由骨骼和韧带构成的环状结构中,例如绕齿关节,绕骨上的凸起恰好嵌入耻骨的凹槽中。韧带构成环状结构,将骨骼固定在位,这样一来,前臂就能完成我们所说的悬前和悬后动作。 球窝关节是所有关节中的全能冠军,它的结构正如其名,一个球体嵌入一个窝内。这种简单高效的结构使其能够围绕多个轴运动,区区伸展、外展、内收、旋转以及缓转。 人体中的两个球窝关节位于髋关节和肩关节。髋关节的窝较深,因此稳定性好,但活动范围相对受限。肩关节的窝较浅,因此活动范围更大,但稳定性稍差。这大概就是肩关节更容易脱臼的原因吧。 椭圆关节与球窝关节非常相似,然而,韧带和椭圆形的形状阻止了旋转,不过它仍然能够在两个轴上旋转,从而可以屈曲伸展、外展、内收和缓转。 球头或椭圆头也可以滑入窝内,当它沿着更宽的平面旋转时,你可以看到它从窝内突出很多,所以它滑回了中心位置。椭圆关节的典型例子是手腕,也称为腕骨,在绕骨末端的关节窝内进行多方向的滑动。 肱状关节与椭圆关节类似,但旋转更受限制,这主要是由于骨骼结构的原因。一块骨的凹面与另一块骨的突面咬合,就像骑在马鞍上的牛仔。 他允许像这样旋转,顶部部件的主体可以在底部部件内滑动。这种独特的结构允许关节区区伸展、外展、内收、缓转 和非常轻微的旋转。安撞关节的一个例子是拇指的腕掌关节。最后是平面关节,它的结构基本就是两块相对平坦的骨面叠在一起,这些骨面可以相互滑动或旋转。 平面关节通常成组出现,比如手部的腕骨和足部的复骨。韧带将这些骨骼固定在一起,允许他们进行有限的滑动和旋转。另一个例子是肩锁关节,棘锁骨与肩胛骨肩峰突之间的关节。
16.1万X科技 00:19
00:19 00:24查看AI文稿AI文稿
00:24查看AI文稿AI文稿这是防回退的集轮机构。这是慢放运动动作的勤纵机构。这是常用于汽车的十字转动万向节机构。 这是减速的摆线轮机构。这是多方向转动动力的曲柄滑块机构。这是不规则无接触的齿轮机构。这是间歇式槽轮驱动定位机构。
1388水怪科普 00:22查看AI文稿AI文稿
00:22查看AI文稿AI文稿折叠座椅秒变床,双平行四连杆机构,两组交叉连杆同步,脚尖坐靠,全程平行,彻底防卡制, 九十度折叠,一百八十度展平轨迹,全程可控,结构稳定可靠。对模型感兴趣的小伙伴可以评论区留言。
1492机械设计海马哥 06:59查看AI文稿AI文稿
06:59查看AI文稿AI文稿这绝对是全网最详细的一期泵类原理讲解视频,一次性给你把二十六种泵讲的明明白白的。从最基础的叶片是泵,到高压稳流的容积是泵,再到特殊结构的专用泵,看看它们到底是怎么工作的,为什么要这样设计?不同场景到底该怎么选? 如果你对泵类原理感兴趣,这一期千万不要错过!强烈推荐点赞收藏,方便随时观看!注意哈!我们先从最常见的叶片是泵说起, 它全靠泵腔里的液轮高速旋转,就像一个超强力风扇,把液体狠狠甩出去,然后甩向外圈,让液体跑起来。主打一个大流量,适配广,从家用供水到大型工业系统, 到处都是它的身影。叶片是泵里最基础的,就是离心泵,电机带着液轮高速旋转,液体从中心吸入,随着叶片一起加速,然后被甩向外圈。在这个过程中速度迅速提升,再通过泵可把速度压缩成压力,最后从出口喷出。结构简单,流量大, 几乎是工业界的万能选手。但如果你要把水送到几十层甚至上百层的高楼,单靠一次甩显然不够,于是就出现了多级离心泵,它不是一个叶轮,而是一串叶轮,水被甩出去一次后,立刻进入下一级, 再被甩一次,压力层层叠加,就像接力一样,一节一节往上推,专门干高压羔羊城的活。可离心泵有个致命弱点, 它不会自己吸水,一旦管道里有空气,它就会空转,完全没用。这就得用自吸泵。自吸泵的核心能力就是自己来,它在启动时,能自动把管道里的空气排出去,把水吸上来, 省去了人工灌水的麻烦。所以在农村抽水、临时排水这种场景里,它特别省事省心。但如果你抽的不是干净的水,而是带泥沙、杂质甚至垃圾的污水,普通泵直接报废,这时候就必须上排污泵。它的叶轮通道做的非常宽,甚至可以让固体颗粒直接通过,不容易堵。 你在市政排水工地、积水、污水处理厂看到的都是这种。如果这是火灾现场,用的是救命水,这时候就轮到消防泵了。他平时可能不怎么工作,但一旦启动,必须在极短时间内建立高压水流, 而且全程不能掉链子。所以它往往是整套系统带备用电源,溶于设计,可能性拉满。如果把泵直接扔进水里工作呢?这就是潜水泵。潜水泵直接泡在液体里工作,没有吸水过程,效率更高,还能有效避免气蚀问题。 你看到的深井取水、地下排水,甚至鱼塘循环系统,很多都在用它。但如果输送的是易燃易爆、有毒液体, 这时候就必须用磁力泵。磁力泵的电机不直接接触叶轮,而是通过磁力隔空驱动,中间完全密封,没有机械密封结构,从根本上杜绝泄露。所以它特别适合输送有毒、有腐蚀性或者贵重液体。 再看一个更精细的叶片泵,它不像离心泵那样靠甩,而是靠转子里的叶片不断伸缩,把液体一格一格挤出去。这种泵的输出更平稳,流量更均匀, 特别适合对稳定性要求高的液压系统。如果是连续供水场景,这时候就有专门的集水泵,本质上是变频离心泵,可以根据用水需求自动调节转速,做到用多少攻多少,既稳定又节能。要是输送油类戒指,油泵就成了标配。它在离心泵基础上做了防爆耐油优化, 换上耐油密封件和防爆电机,在油库这种高风险环境下也能安全运行。还有一个容易被忽略的旋涡泵,它的叶轮是圆盘状的,转起来靠叶片和泵壳形成旋涡,让液体在旋涡里反复增压,几百米的扬程轻松拿捏,就是流量小, 适合精准输送。再来看流量怪兽轴流泵,他的叶轮像船,用螺旋桨直接沿轴线方向推水,水流几乎不拐弯,流量大到离谱, 但扬程很低,常用于排涝灌盖这种要量不要压的场景。如果既要流量,又要一定扬程呢?那就用混流泵,它结合了离心和轴流的特点,液体既被甩又被推,属于一个折中但很实用的方案,适配场景非常广。 还有一些特殊净化板,比如屏蔽泵,它把电机完全封闭在壳体内,避免泄露腋下泵直接安装在液体容器中,专门处理深池工况。侧通道泵,它是通过液轮与侧通道形成循环流道,液体在通道内反复被加速增压, 实现高扬程输出。特点是小流量、高压力,自吸能力强,适合输送清洁液体及寒气戒指。看完这些靠甩水干活的叶片是泵,接下来就是容积是泵。这一类和叶片是泵的核心原理完全不同, 它不靠甩水,而是靠泵内专属的密封工作室,一缩一掌改变容积来干活。吸的时候容积便大,把液体吸进来挤的时候容积便小,把液体推出去, 底多少出多少,流量超级稳,而且可以轻松打出高压力。最经典的就是齿轮泵,两个齿轮捏合旋转,把液体困在齿间空间里,一格一格往前送,结构简单,输出稳定,特别适合润滑系统。 但齿轮泵的脉动比较明显,为了更平稳,就有了螺杆泵,利用螺旋结构形成连续密封空间,把液体柔和的推送出去。 三螺杆适合含固体戒指,双螺杆,三螺杆则更稳定,常用于石油输送。再往精细方向发展,就是转子泵,它的转子之间不直接接触,避免剪切和污染,特别适合食品医药行业。 如果要求更高,液体不能接触任何金属部件呢?这时候就轮到蠕动泵登场了,它是利用滚轮不断捏压软管,把液体一点点推走,液体始终待在管子里,干净、安全可控。再看隔膜泵,通过隔膜来回鼓动,把液体吸入,再推出适合腐蚀性、危险性液体。 如果你需要极高的精度,比如每分钟必须精确输送几毫升甚至更少,那就必须用计量泵,它可以精确控制每一次输出量。 化工加药系统的核心设备,再往极限走,就是往复泵和注塞泵,通过活塞或注塞反复运动,把液体强行压缩,输出压力可以高到非常夸张,像高压清洗、石油开采,甚至水刀切割都离不开他们。讲到这里,其实已经覆盖了百分之九十的应用场景,但工程世界 从来不按常理出牌。如果你要抽的不是液体,而是空气呢?这时候就需要真空泵,它通过不断排出气体, 在密闭空间中制造负压环境、芯片制造医疗设备,全都离不开它。再来一个更离谱的抽鱼泵,它不是简单的抽水,而是通过水流把鱼一起输送,整个过程要精确控制流速和压力,既要效率高,还不能伤鱼。听起来简单,但背后是对流体控制极其精细的设计。 看到这里你会发现,原来我们身边这些看似普通的泵,其实每一类都是为了解决一个非常具体甚至极端的问题。 从甩水的叶片是泵,到挤水的容积是泵,再到各种特殊定制泵,每一款泵的设计都是为了适配不同的工况、不同的需求。看似简单的结构,背后全是工程师的巧思。泵的发展历程, 也是机械工业不断探索创新的历程,而这些藏在细节里的机械之美,正是最让人着迷的地方。那你还有哪款泵没搞明白的吗?
4344机械视界 00:16查看AI文稿AI文稿
00:16查看AI文稿AI文稿我以令牌为号,一声响,风来。二声响,云起。三声响,电闪雷鸣。四声响,雨至五声响,云开雨收。
851工業自動化








猜你喜欢
- 1449容商天下
最新视频
- 3840万万渔业