abb仿真机器人控制夹爪怎么获取
当我们需要拿取一个物料的时候,我们应该怎么操作呢?我们可以采取假取的方式,可以运用类似这样的假打气缸,然后我们程序这样操作,添加指令, 然后插入这个开关, d o 指令插入,我们提前配置好的一个加大信号, 然后我们运行一下这段程序, 这样我们就能实现对这个夹爪的控制,从而夹取物料。

粉丝7032获赞1.9万
相关视频
 10:08查看AI文稿AI文稿
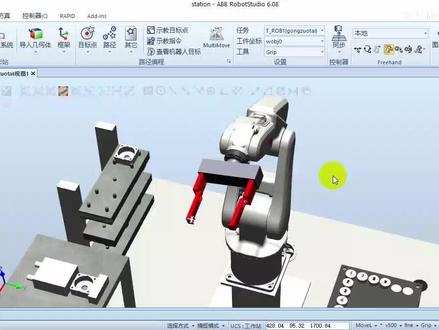
10:08查看AI文稿AI文稿我们再回到这个工作站,现在呢,我在这个第六轴啊,拓林上面安装了一个加爪工具,所以呢我们需要去设置这个加爪工具的工具数据啊,那么对于这样一个对称的一个 坐标远点,包括他的坐标方向,很容易去判断的这样的一种工具呢,我们就没有必要再去用六点法去做了,我们直接可以去测量一下啊,用这个输入直的方式去做啊,那么具体什么意思呢?我们可以把这个工具先给大家拆下来 啊,给他先删除呢啊,点这个拆除,拆除以后恢复位置,哎,就可以让他回到嗯,他最开始的那个原点啊,我们把下面这个隐藏掉, 看一下,这边还藏了一个另外一个工具,是吧?我把这个工具给他删了吧。好,就这样一个,那么我们可以看到现在我要去知道他的 tcp 点不就是这个点吗? 对吧?就这个点,那我可以去测量一下,嗯,测量点到点,然后这边选择端点捕捉,是吧?我可以选到最下方他的圆点这边点一下,然后再往上去。 这个框架呢,你们那边不一定有,所以我们可以选到这个加法上面最顶端选一点,然后会拉出这样一条斜线,这条斜线呢一共是二百二十二点七七,但是我们只要看什么呢?我们只要看从下往上他的 x、 y、 z z 方向二是一啊二, 二百一十五点三,所以说呢,嗯,这个坐标远点就应该是 z 方向偏二百一十五点三。好,我再把这个工具再重新安装啊,安装到这个机器人上面更新一下位置 啊,以存在是否将其替换啊?是啊,你喜欢他先这样。好,我们看一下,又回来了,对吧? 回来以后,那么我们就要去到这个试教器里面啊,试教器里面什么都没有啊,这个要注意,就是在工作站里面做的,好像是有这个 greep, 对吧?这些都有,但其实呢在这个试教器里面是没有的啊,我们要在试教器里面去做 好,我们点击新建,然后呢给他起个名字啊,我们就叫 t 啊, t 代表是工具错,我们就不变, 后面加一个什么呢?及 r i p 啊,加转,取完名字以后呢,我们就要对他进行数值的设置,那么这里面呢,我们下方全都用默认了,我们点左下角的初始值 进去以后就可以看到整个工具数据的一个结构了,那么最下面这个 t 规法就是我们工具数据的名称啊,这里面是一串数据,这边每一项都对应的下面列表里面的啊,然后最后就是一个数据类型,那它是一个什么呢?它是一个 toilet 工具数据, 然后第一项呢就是 rob 啊, robe 啊后的有没有 hold 住,对吧?他现在是不是被这个机器人 hold 住的呢?那显然是的吧,他会跟着机器人一起动,所以这个地方应该选择是啊,真 然后呢,下面这个就是什么呢?就是工具的框架,或者说我们经常说的工具坐标啊,或者我们在那个之前看到那个框架,哎,就这个框架,对吧?就是工具坐标,那么啊,我说过了,这个工具坐标呢,因为这个夹爪他是一个 对称的一个内容,那不是,他是一个对称的,而且他这个 tcp 点,对吧?跟这个透零应该是完全在透零的这个 z 轴上面,所以我们这里面 x 和 y 都不用变了, 直接变贼轴,刚才我们算出来他是二百一十五点三,那我们就用这个纸,那么这样可以保证呢,就是在这个顶端的这个位置上点击确定好再往下走,那么姿势这个地方呢,就是说是一零零零代表什么呢? 代表这个坐标系,我们看到这个坐标系跟拓林他是完全方向是一致的啊,所以我们下面就不用变了,再往下走,那么下面这一串就是 tlo 的,就是什么?就是他的一个复杂 啊,你这个工具到底有多重啊?那么这里面呢,可以看到他默认只是负一,哎,这个就很灵性,如果我们忘了去设置踢规划啊,不对哎,如果我们忘了设置这个踢漏的会怎么样啊?我现在这里确定确定 他会说什么?他会说 t 规划包含组建什么 t low 的点 max 质量,它是一个无效数据,要纠正,我们看一下这个什么 t 要的 max 是哪个?就是这个 t l 的下面点这个 max, 所以我们点进去以后给他设个质量,然后假设他是一公斤, 一确定好再往下走呢?是什么?就是工具的重心,哎, 工具的重心就是这个工具重心在什么地方?我们知道你要控制力的话,一般来说是一个力距控制,对吧?那么力距控制的话,就一定要知道这个重心在哪。好,那这里面呢,我们就随便写一个,比如说写一个什么?写一个一百, 确定好,咱们下方同样也是重心的这样的一个转动关亮啊,我们这边也不用去动他啊,那下面我们这个转动关亮之类都不去管他,直接确定好,确定,这样我们就创建了一个 t grip 啊,就是这个夹爪的这样的一个工具坐标,那么建完以后我们怎么去验证他做的好不好呢?哎,我们点击确定,然后我们在动作模式里面选到重定位确定, 然后工具坐标坐标写 tv, 然后我们去操纵机器人摇杆选下动来看一下。 在这个运动的过程中,我们可以看到不管机器人的这个姿势怎么变,他对应的这个 tg 啊,工具坐标的那个原点,我们称之为是 tcp 点,对吧?这个 tcp 点他的位置是 保持不动了啊,那么这样子就说明什么呢?我们这个夹爪工具的工具坐标设置是正确的啊, 大家请注意我的这个用词啊,我说你通过这个重定位去验证的话,只要这个点不动,那么说明我们这个工具坐标是设置正确的, 什么意思啊?看一下就是什么这个啊, t from 对吧?这个 t 框架是正确的,但是下面我们刚才不是说了吗?还有什么 tlo 的就不一定了吧,因为我这个东西到底多重 你也没去测,只是随便写了个一,包括下面重心,对吧?包括下面我这些值转动坏量都没去舍啊,那这是怎么回事呢啊?其实 也很容易理解对不对?在仿真啊这里面,你这个重量,这个重心,你,你怎么去给呢?或者说你给了好像也没有什么意义,对不对? 那只要我们不去做动态仿真,那这个东西多重是不是对我整个没有影响啊?那么我们来做一个嗯,比较有意思的事情啊,现在点进去以后更改 改直,我把重量改掉,现在不是一公斤吗?对不对?我把它改成十,确定确定确定。哎,请问大家这个时候如果我再去用这个摇杆摇会发生什么样的问题呢? 咱可以猜一下啊,好开动了啊,哎,他说什么有效载荷过大,有效载荷过重,超过关节, 他的一个静态赚取的限制,就说明什么意思啊?说明我现在设置的这个工具太重了,已经超出了这个机器人的负载能力了啊,那么这台机器人他的负载能力是多少呢? 我们看一下他叫什么呢?他叫 l b 这个, 哎,我们看这里啊,发什么 irb 幺二零点下划线啊,不是下划线三,哎,这个数据就是这个机器人的负载能力, 他是一个三公斤的机器人,注意了啊,是负担能力是三啊,不是说机器人本体重量是三,对吧?他是一个三公斤的机器人,而我现在在工具里面吃了多少?刚才我吃的是十, 那很显然就超出了他的一个复杂能力了,所以这里面也是需要注意的一个点啊。好,我还是改回一确定,看,确定确定,然后把这个错误给他确定的,然后再来动,哎,这样就应该是,哎,防护装置停止啊,再把 napple 点开, 点开以后我们再来动一下,哎,怎么还是停止呢啊?多停两下啊,多停两下, 好,这样就又可以动了啊,所以说复杂是一个非常非常关键的一个信息,对吧?好,我们这里面千万不能设错。好, 那么这个时候可能就会有小伙伴说了,那你这个重要随便估算为一个,在软件里面看不出来,那如果到硬件里面的话,那这怎么办? 是吧?那么其实在 app 里面他有一套自动计算载贺的一个应用程序啊,可以让机器人自动的去算。什么呢?自动的去算你这个家抓的 重量啊,重量包括下面的这个重心转动挂量,他都可以自己去算啊。那么这个内容呢?就放在下一个视频啊,放在下一个视频。
126工控社区 21:19查看AI文稿AI文稿
21:19查看AI文稿AI文稿大家好,我是小木, 我们继续。本期我们来介绍一下 abb 机器人抓手工具安装与工件搬运。视角编程首先还是先打开上一期保存的虚拟仿真项目,这里我已经打开了,在视角编程之前,我们先来标定一下机器人测快换法兰的工具坐标器, 在基本菜单元下点击一下这里的其他,他这里有一个创建工具数据,我们点击他这里,我们先输入工具坐标系的名称, 我们就管它叫做这个名称。在工具坐标框架下面有一个位置,我们在这里点击它 会出现一个向下的箭头,我们点击它,这里可以通过直接拾取快换法兰中心的方法来获取工具坐标的数据,但是呢,我们可以先放大一下, 从这里我们可以看到快换法兰的 tcp, 它就相当于机器人默认的 tcp, 相对于 c 坐标进行了一个平移,它的偏移量就相当于是快换法兰的厚度,因此这里我们可以直接输入工具坐标的 c 坐标数据。快换法兰的厚度呢,我事先已经测试过了,它是五十八点四二, 我们直接输入,然后点击一下应用,底下还有一个重心的数据,我们同样点击重 薪,也相当于是便宜了法兰厚度的二分之一,它是二十九点二一, 点击应用,然后点击创建,这个时候我们可以看到这里出现了快换法兰的工具坐标,同时这里的工具这里也出现了我们创建的工具坐标系的名称。 工具坐标系标定完成之后,我们开始视角编程,首先我们点击一下这里的路径, 点击空路径,第一个路径是机器人的 home 点程序路径,我们对它进行重命名。 第二个路径呢是机器人安装抓手工具的程序路径,我们把 它叫做这个名称。 第三个路径呢是机器人搬运工件的程序路径, 我们把它叫做这个名称。第四个路径是机器人拆除抓手工具的程序路径, 我们把它叫做这个名称。我们首先来是叫机器人的 home 点程序, 点击一下后面点程序路径,然后游击它,这里可以选择设定为激活,这样我们视角的程序指令就会自动添加到这个路径里面了。我们手动进入 一下机器人,先将机器人的五轴给他运动到九十度的位置, 在软件的左下角我们可以看到它有这么一行是可以设定机器人的运动指令的,我们在这里呢选择运动指令为关节,运动速度为一千,转弯形式为 five, tcp 为法兰的 tcp。 然后我们点击一下这里的视角指令,这里点击一下是, 然后我们可以在这里看到我们试教的指令,就添加到了 home 程序路径下面,然后我们再来试教机器人安装抓手工具的程序路径,这里同样的我们先把它激活,我们先将 机器人的六周运动到负九十度的位置, 然后我们缩小一下,将机器人的一轴也运动到负九十度的位置, 让他接近抓售工具,这里我们点选一下机器人使用手动现象, 这里我们可以选择一下直取平面,直取的平面为捕捉中线, 我们拖拽它,这样机器人就直接进行了法兰的对接, 这里我们要将运动指令切换为直线,运动速度同样是一千,转弯半径为半。点击一下视角指令, 那么这里呢,就添加了我们社交的程序指令。机器人呢,是在这里安装抓手工具,所以在这里我们要添加一下只为安装抓手工具的 io 信号。 我们可以先点击一下这条指令,在这里他有一个,其他,底下他有一个创建逻辑指令,我们点击他。 在指令模板下面呢,我们选择 set 信号,这里我们选择安装抓手工具,点击一下创建。由于信号的发送是有一定的时间的, 所以这里我们要加一个延时,延时时长呢,我们设定为一秒, 底下呢,我们还要添加一下过渡点的程序。在添加之前,我们先将抓手工具的工具数据同步到机器人, 这里我们可以将抓手工具拖着来到机器人上,这里的更新位置我们选择否?由于抓手工具并不是直接安装到机器人上,所以这里我们再对它进行一个拆除, 同样选择否,这样我们可以看到他就多了抓手工具的 tcp 过度点程序的添加,我们需要把抓手工具安装到机器人上,所以要手动置位一下信号, 这里剪辑一下仿真。在 ao 仿真器面板这里我们过滤器,选择数字量输出 控制器下面我们打开控制面板,这里切换为手动运行模式,这里可以将安装抓手工具的信号给他置位,然后我们继续添加过渡点程序, 这里的 tcp 我们仍然要选择法兰的 tcp, 我们可以先取消一下补助,先向上移动一下, 可以先将围栏给他隐藏, 大概是这个位置吧,点击一下睡觉质量, 也就是机器人安装上抓手,向上运动一下,那么机器人再从 home 点运动到抓手工具位置处,同样需要这样一个过渡点,我们可以直接复制它, 然后进行粘贴,这里是否创建目标点,我们选择不创建, 然后我们把这三个指令给他拖拽到他们俩中间,这样机器人安装抓手工具的程序路径就试教完成了,我们再来试教机器人搬运工件的程序, 同样的给它先激活这里我们需要将 tcp 切换为抓手工具, 先添加一个过渡点吧, 就是这个位置吧, 然后将机器人移动到弓箭位置处, 大概就是这里吧,给他施教指令,同样的需要添加过渡点,我们先将工件抓取上,点击一下抓取工件的信号, 给它往上移动一点, 然后睡觉指定 这里,我们复制粘贴, 将这个点给它拖拽到这里,也就是机器人从这个点运动到抓取弓箭的位置处的时候呢,先经过一个过渡点,抓取完弓箭之后呢,再运动到这个过渡点的位置,同样的,这里 要给他添加机器人抓取弓箭的 io 信号, 这里选择 set 信号,选择抓手工具关闭的信号,点击一下创建。由于抓手工具压币的运动需要一个时间,所以这里我们要进行等待, 关闭的时间是一秒钟,这里我们也给它设置为一秒钟, 然后我们是叫机器人放置弓箭的程序, 这里给他继续向上运动, 我们先来视角一个过渡点,弓箭的放置方向应该是这边朝着这边,所以他要六轴旋转一下, 应该是副方向 大概九十度的位置,再给他往这边运动点, 高度再高一点, 大概就是这个位置, 然后是放置空间的位置, 大概就是这里吧。 同样的,放置完弓箭之后,他要回到这个过渡点,我们复制他, 那么他在放置弓箭的时候呢,要复位抓手关闭的 l 信号,我们给他添加一下,这里选择 reset 复位的信号, 选择抓手关闭信号,同样要给他等待一秒钟, 这样机器人搬运工件的固定程序就试教完成了,我们再来试教机器人拆除抓手工具的程序,同样给他先激活 拆除抓手工具的程序呢,我们可以直接使用安装抓手工具的 续的视角点,他就相当于是他的一个逆运动,机器人放置完弓箭之后呢,从这里要运动到这个点,也就是这里的三零,我们复制他 啊,真的很。 然后是放置抓手工具的程序,最后返回到过渡点, 我们可以先将弓箭放置,然后呢将抓手工具移动到这里,再移动到 放置抓手工具的枪架上,那么在这里呢,需要复位一下安装抓手工具的 io 信号,我们给他添加一下 逻辑,指定它是 recit 复位的信号就是这个信号,同样给它添加一个 时间的等待,等待的时长为一秒钟,然后我们把它复位, 这样抓手工具就拆除了,我们把它调转到 home 点的位置处, 全部的程序就视角完成了,但是呢,我们要对程序的指令进行一个优化,我们依次来看一下,首先是机器人 home 点的程序, 那么他呢不需要进行优化,然后是机器人安装抓手工具的程序,他由这里运动到这里,这里呢可以将运动指令修改为关节运动, 这里有一个编辑指令,我们把它改为关节转弯的形式,可以改为 z 二零, 第二点不需要修改,第三点也不需要。然后是机器人搬运工件的程序,那么它由这里运动到这里,也可以给它改为关节运动, 这里也是 z 二零,这一点也是同样的, 那么这一点不需要修改,这一点也不需要。那么这一点呢,可以给他修 修改一下, 这一点也可以修改一下, 这一点不需要。这一点也不需要。 这一点呢可以修改一下, 这一点不需要。这一点也不需要。到这里呢,机器人的程序也优化完了,我们可以对 视角的程序进行一个手动的测试,先将工件恢复到初始位置, 我们还是输入它的坐标值, x 是一千四, v 是负九百三, z 是一百七十五, 绕着 z 轴旋转一百八十度啊,点击一下应用,那么他就恢复了初始位置。这里我们可以依次进行一个测试,那么先让机器人来安装抓手工具, 我们可以点击它,然后右击,选择沿着路径运动。 机器人已经安装了抓手,然后是搬运工件, 他已经将工件放置到了简易工装上,然后是拆除抓手工具, 抓手工具也拆除了,返回 home 点, 通过测试可以看到我们试调的所有的程序都是没有问题的,我们再将工件恢复到初始位置, 然后把它关了,把它也关了,把围栏回火,可见 以上就是 a b b 机器人抓手工具自动安装与工件儿 搬运视角编程,我们可以点击一下这里进行一下保存。好了,今天的视频就到这里,我是小木带给您使用的工业机器人技术,如果您喜欢,欢迎点个关注,点个赞,如果您有工业机器人技术方面的疑问, 也可以在评论区告诉我。感谢您的支持,咱们下期见!
 00:57
00:57 02:01查看AI文稿AI文稿
02:01查看AI文稿AI文稿大家好,本节课跟大家讲解一下 a p p 机器人信号控制指令 set 跟 reset 它的一些呃含义以及使用。 那么赛指令呢,在我们的一个信号的应用中呢,就是我们控制夹爪的一个夹紧 啊,那么 reset 呢,就是反过来啊,就是夹爪的复位信号,那么相当于一个夹紧,一个松开啊这两个信号, 那么是如果说你要去夹东西,那么我就要用 size 指令是吧?如果是夹耳到了放置的地方,你要放下来,那么我你就要用 reset 这个两这个指令 啊,那么 set 跟 reset 呢,它都是控啊,用于控制我们的 d o 信号的啊,就是我们的数字输出信号啊,不是输出信号,这个大家需要特别注意, 在当前的这一个工作当中呢,我在这个视角器这里呢,有添加了一个 set 啊,以及呢一个 reset 指令,它呢可以控制我们的夹爪的关闭以及呢 松开这两个操作,那么我们通过这两个指令来验证一下它的一个效果,我们首先调试,对吧? pp 一正进行程序 啊,然后运行到我们添加刚刚那两条指令的程序里面啊,然后点击上电啊,已经是处于上电状态了,如果说是这个状态,那么你一定要上一下电, 然后呢我们裆部运行啊,来看一下他的一个动作效果,我们关注一下这个夹爪,他的一个动作我单击啊,可以看到呢,他现在是闭合的一个状态,那么这个 reset 就会 重新把它打开,然后我们继续呢当步走一下,哎,可以看到夹转了,是不是可以松开啊,所以呢,这是我们控制 啊,就是我们 do 信号啊,在我们现实中用的比较多的啊,就是控制我们夹爪的一个夹紧以及松开的两个指令。
95工业机器人教学 01:04查看AI文稿AI文稿
01:04查看AI文稿AI文稿之前有说过啊,这个夹爪有用电和气的,我们工业中常用的就是这种两指的气动夹爪,他依靠压缩空气工作,但是只能夹取这种固定的尺寸,如果你需求比较单一,只要夹取固定大小的物体的话,你就选它,而且价格非常的便宜。那像这种 这种电动的夹爪,他不但能够夹取不同尺寸的弓箭,还能精准的去设置他的抓取力的大小, 一般三 c 行业可能用的多一点,当你设置好过后,他可以夹取不同大小的东西,但是价格相对于就嗯高很多。现在呢,又出现了这种哎柔性的夹爪,他也是用气的,和电动一样,他可以调节这个气压来控制 这边的抓取力。哎,在这里调节啊,那他和电动的区别是什么?就是他可以做的很小,就像这个样 样子,他可以运用在比较狭小的空间来使用,还有就是他的一致性,他可以同时控制二三十个哎,控制他们的开合,你用过哪一种呢?下课,哎呀,掉了掉了。
2932我是工程师! 00:58查看AI文稿AI文稿
00:58查看AI文稿AI文稿好,下面我们给大家来演示一下 abb 机器人的一个定位抓取功能,上面配了一个金饰的一个 cdd 的视觉相机,是我们那个弓箭,下面我们将弓箭任意放到我们上面的一个位置,随便码放,然后这个时候启动机器人, 然后视觉相机先进行拍照,拍照完成之后呢来进行抓取,抓紧之后放到我们指定的一个位置上面。好,这就完成了,下面再换一个位置,然后再次启动, 好再次拍照,拍了之后定位抓取,抓取之后呢同样放到我们的一个指定位置上面, 好摆放完成,这是静音式的视觉控制系统,想学习机器的编程同学,双击关注给大家分享更多知识。
 09:11查看AI文稿AI文稿
09:11查看AI文稿AI文稿那接着我们看我们的第二部分, 在第二部分的时候我们会在我们开始的夜间中拉入一个桌子跟一个弓箭,那我们在这边,我们在成立这边先将我们刚刚所 刚刚所写所编程东西先将它删除, 接着我们到我们开始叶签,在开始叶签这边我们要先将我们所需要的所需要软件给他拉出, 你将用桌子拉到三 d 世界中,接着再拉出一个, 再弄出一个弓箭, 接着我们用辅助功能将我们弓箭放到桌子上, 之后我们到某城市夜间,接着我们要将我们的我们要在做在我们的街手边这边做一个设定,这个是用触动在里面做一个设定,那我们机做,我们这边选择是 base 外, 那我们工具这边用毛做一个抓取的动作,所以我们要从看到原件属性, 连接属性,这边有动作配置,那我们选择看我们的信号,一双赢面我们就看到他可以做捕捉 跟翅膀动作,那他用的是坐标,是兔耳腕,顺回到触动,然后选择兔耳腕,那我们兔耳腕位置跟我们要的 抓取的位置是不一样的,那我们这边先将先进去哦中面的图标,由此图标我们点进去之后,我们先将这边坐标选坐标类型的,接手臂吐火坐标打开,然后另外有坐标,然后打开, 那我们之后我们教我们用补桌,那我们用补桌坐标方式来捕捉我们 tcp 的坐标,那我们的 tola 移动到 tcp tptv 的坐标上面,那这样子我们就结束结束他的设定,接着我们就可以用我们的, 我们就可以用破万来做一个动动作,那接着我们一样,我们用捕捉将我们的, 将我们的夹住,嗯,将我们夹住啊,移动到我们的空间上面,移动到空间上面之后,我们就可以来做后续的动作,因为我们现在要做一个补助的动作,所以我们往下拉, 往下拉,拉到一个比较合理的抓储位置,让我们家船要打开,做一个移动到一个合理的位置, 移动到会议位置之后,我们先将这个点位记录这个点, 第一个点位我们先记录在这里,就是他抓取弓箭的位置,接着第二个点位我们要记录的是他离开弓箭抓取或者停放点位置,就是他预预停,要抓取之前的预停放点,那我们先在面记录一个点位, 那我们记得这边从后到我们的弓箭上方停顿停止,然后再往下抓取弓箭,然后再把它拉再抓起来,所以我们会有三个点位,会有两个点位是同样的点位, 你在筒子位置,你在这上面弓箭上方这位置会做两次同一个点位动作,所以我们来记录一次点位,那将这张点位拉到我们的点位, 卫衣上衣 让我们就会停顿,我们我们工,接着我们抓手就会停在我们弓箭上方,然后抓住弓箭,然后再拉到我们弓箭,让我们弓箭抓起来, 那接着我们现在要设定信号,信号,我们现在在确认一次我们的信号源,我信号源是 庄园,就是一百是我们的开启,一百是我们启动讯号,然后一零二 是我们的开启讯号,加爪开启讯号,然后再是关闭讯号是一零一,确认后我们就在我们的上方,在上方这边做一个开合动作, 说明要输出信号一百, 接下来我们要再等待一个群号,我们要往做开的动作是一零二, 我们在输出子这边等待,要勾存起来,那我们到这个顶位,在顶位上的时候我们就可以看到他做一个开的动作,然后我们知道顶位一,顶位一这边我们就要做一个抓取的动作,所以我们就去做 一零一百输出的群号,然后再输出,他会在输出的群号 做一个让贾岛所有闭口的动作。一零一,接着我们会在接手边再说出一个讯号,叫一 注水循环一,然后呢做一个抓取的动作,接着我们作业再拉起来,那就再把它抓起来离开,离开我们的桌面,那我现在看一次,看一次模拟 好像抓起来,那我们这边发现说我们在抓起来的时候,他没办法确定他会整天抓到正中心,然后不会在我们的贡献外围,那这边我们要做,我们要去做一个修正, 在脚掌这边我们要做一个修正,先拉跑, 那我们看到这边我们要做一个锁整,我们先将两侧我们的,我们用编辑来两侧,我们几弓箭的 外尾再一个宽 来日清零点七,让我们回到原件属性 七零点七,我们这边会从两边夹爪刀分别移动七零点七,零点七的一半,所以我们是七零点七除二,那就是他移动换移动的距离,移动距离之后我们然后再 他要开启这边,我们要让在做一个移动距离吧,这样子的话,我们等下他下来到这个点位之后他就抓住, 抓住之后他就停在这里,然后就刚好做这一个可以抓抓到攻心外围,然后再拉抓底桌面, 接着我们设定完之后,我们回重置,然后再播放, 我们就看到他没有,完全没有抓弓箭里面之中,啊弓,弓箭外围, 那接着我们来做一个放射的动作,现在我们先取动作已经做完了,然后接着我们要做一个放射的动作,当我们在复制的时候,我们在选取人员点位的时候,我们可以用去辅的键,去辅的键,这我们先点一个点位, 银行,银行城市,然后我们再点另外一个城市,去文件点选之后,然后再将我们主店选一点,所有元件都一起选取起来, 全球起来之后我们就这样复制,然后点选我们最后一点,然后再这样子 贴上,贴上之后他就要做一个取放的动作,那这边我们要注意做一个修改用,我们要做放开的动作,所以我们这边是修复时是要取消的,那我们这边的等待讯号变成一零二, 那我们这边的抓取的动作,我们要将运放置的动作,那我们再看一次魔力, 那我们就第二步,你就将我们的取放动作设置完毕,那我们就看到他已经模拟完成, 那么第二部分就到此结束,那么这一片就到此结束,谢谢各位聆听,希望您能有所收获。
 09:38查看AI文稿AI文稿
09:38查看AI文稿AI文稿零基础学习工业机器人,哈喽大家好,本节课的内容是虚拟试热器界面介绍,在正式课程前,先打开上节课所保存的虚拟工作证, 打开之后来到控制器菜单栏,当击他 可以看到下边有一个叫视角器的图标,直接单击或者单击这个下三角图标,可以看到一个叫虚拟视角器的图标,单击即可打开虚拟视角器。 当前我们所看到的就是虚拟饲料器的相关界面, 接下来我们对它进行一个详细的了解。 首先窗口的左上角这一个是主菜单的快捷栏,单击它可以进入主菜单。 右边的这个有个人物图标的是人机对话框,如果机器人程序当中有相关的人机对话语句,都可以在当前界面进行显示。 在右边这个是状态廊,通过状态廊我们可以看到相关的机器人信息,比如当前机器人是处于自动模式,电机处于开启状态,机 人当前是停止的一个状态。成速度百分百,表示机器人运行时候的程序速度是按照百分百的速度运行。除此之外,我们当机他 当机。状态栏还可以进入一个叫做事件日志的画面,这里呢可以显示机器人在运行过程中所发生的相关的一些操作。 如果你机器人发生相关的程序报错或者说系统故障,也可以通过事件日志进行查阅。 下边的这一个白色的框我们叫做 试图窗口,在这里可以进行相关的配置编程啊,包括查阅等等的一些操作。这一个叉可以关闭当前的窗口,回到试热器的主页面。 接下来再来看一下视角器右边的这些按钮,首先我们看到的这一二三四这四个按钮是机器人 a o 相关的快捷键,也叫做可编程按键, 这个在我们学习 i o 相关知识的时候会用上它。这个红色的是急停按钮,这两 两个是机器人的模式操作键,就是我们进行手动操作的时候,我们可以通过它可以快速切换机器人的运动模式。 上边这一个是切换机器人手动重定位及手动线性的模式快捷键,下边这一个是切换机器人手动关节运动的一个模式快捷键, 在这里我们可以对他进行一个演示,演示前我们需要先把机器人的模式由自动改为手动,具体的操作可以当机这一个控制器的面板图片 标。当其他这里有三个模式按钮, 首先最左边的这一个是自动模式,中间是手动限速模式,手动限速模式下机器人的线性运动速度为两百五十毫米每秒。最右边这一个是手动全速模式,我们需要把它切换为手动限速。 对于我们初学者而言,我们正常用手动模式进行相关的操作, 当我们选择手动限速之后,我们来到状态栏,我们可以看一下他当前的模式已经切换为手动模式,那么在手动模式下 很多的操作就可以进行,比如说刚刚要讲的这个手动模式的一个切换键,当击他 左下角右下角这个图标就是一个手动重定位的一个显示图标,我再登记一下,它当前就是一个手动线性的图标,那也就是说这些当前处于手动线性模式下, 当我们点击下边这一个,可以看到它是我们的手动关节的一个模式, 一到三,四到六这两个切换啊,反复切换 下一个,这一个是增量模式的切换键, 增量模式如果你打开当前这个图标是这个样子,如果说你关闭它,它的图标是这个样子,会有一个静止图标。 增量模式打开之后,机器人的运行速度会变慢,可以方便我们进行一些更为精确的手动操作。 在下边的这四个按钮是机器人的播放停止步、退步进相关的按键操作。 再往上看,这有很多箭头的,这一个是手动摇杆,我们进行手动操作的时候,需要通过摇杆来控制机器人的相关运动。 这个 in able 我们叫做使人键,也是机器人在手动模式下的一个上电按钮。当然在真实的试药器当中,这个按钮没在这里,它是在这个侧边, 需要用手按下去保持,那么他就可以一直进行上电,如果手一松开,或者说握的太紧,他都会断电。我们演示一下给大家看, 当前呢我们可以看到状态栏当中是防护装置停止的一个状态,也就是说他当前电机是没有上电的,我们当记一下这个 nable, 当前就会变成电机开启状态, 只有在电机开启状态下,我们才可以进行相关的手动操作。关于具体的一些操作知识点,在后续呢会跟大家再次详细的进行说明。本节课只是让大家了解一下试药器的相关界面, 接下来我们再看一下窗口的 最右下角有一个快捷键,我们单击他可以看到这里呢还有一些选项,这个就是增量模式的一个选择,这里呢可以选择增量的 五小中大相关的模式,这个键是可以切换机器人的一个运行模式,你是当周还是连续?下面这一个是调节机器人的步进模式的选项, 这个下边是调节速度的运行速度的一个百分比,当前选择的是百分百,如果说选择百分之五十, 我们可以看到状态栏当中的速度也变成了百分之五十,那下边这一个比较少用,是停止和启用相关任务。 关于虚拟试药器的常用界面,我们本节课就介绍到这里,关注我,后续内容更精彩!
136工业机器人教学 02:28查看AI文稿AI文稿
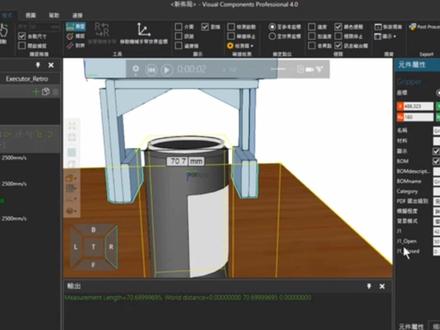
02:28查看AI文稿AI文稿工业机器人编程 abb industrial robots 第十七章 vbb 工业机器人 robots studio 不可动工具的建立首先建一个空的工作站, 导入设定工具的模型, 点击建模,新建一个小正方形,建立一个基准,让这个选择吸盘。模型选择放置,选择三点法, 放置完成之后删除小正方形。现在这个模型 与坐标系保持一致,选择设置工具,选择已有模型,选择吸盘。 现在需要把这个坐标系放在呃吸盘的最下方,所以我们先测量一下这个吸盘距这个底面的距离, 选择点到点,测量气盘到平面的距离, 读出数值,把数值 潜入到参数表那,点击下一步完成,观察这个坐标系是否在这个工具的中心。 不可动工具设置完毕, 喜欢的朋友长按点赞,强烈推荐一下吧!
 07:47查看AI文稿AI文稿
07:47查看AI文稿AI文稿下面我们继续学习仿真软件中传送带组件的创建方法及操作步骤,如图所示。在前面的课程中,我们添加了机器人模型,创建了机器人系统, 在机器人第六轴法兰盘上安装了机械夹手,组建创建了弓箭集合体模型。下面我们导入传送带模型, 选择导入模型裤,选择设备,选择输送链,选择默认宽度四百毫 猫咪,点击确定 传送带模型默认放置位置。在世界做标系的原点位置, 我们可以通过移动命令使用鼠标拖拽的方法调整传送带的位置, 也可以使用坐标偏移的方法来调整传送带的位置。右键点击传送带,选择位置,选择偏移位置。 首先将传送带沿歪轴副方向移动两百毫米,点击应用,点击关闭。 我们通过俯视图来观察,这样传送带和机器人就在同一纸线上。 下面我们再次右键点击传送带,选择位置,选择偏移位置,沿 x 轴正方向移动一千毫米,点击应用,点击关闭。 这样传送带模型的位置我们就要调整完成。 下面我们将弓箭几合体放置在传送带上面,我们选择捕捉末端右箭选择弓, 选择位置,选择放置,选择一点调整视角, 点击主点,从 调整视角 将捕捉更改为捕捉边缘, 点击主点道, 点击应用,点击关闭。我们通过复制图观察, 使用鼠标拖拽的方法调整弓箭集合体, 将弓箭几合体放置在传统在中间, 这样弓箭几合体就放置完成。 下面我们点击建模指令, 选择 smart 组建, 右键点击新创建的 smart 组建,选择重命名,将名称更改为传送带, 回到仕途窗口,点击布局, 使用鼠标拖拽的方法将传送带模型添加到传送带组件中。 右键选 传送带组建,选择编辑组建,首先选择添加组建,选择传感器,选择面传感器。 在新弹出的属性对话框中,我们需要设置传感器的原点位置,传感器的高度以及传感器的长度。选择仕途窗口,调整视角, 首先选择传感器的原点位置, 设置传感器的高度, 这轴方向五十毫米,设置传感器的长度,歪轴方向四百二十, 点击应用,点击关闭,这个时候我们就创建完成了面传感器组建。 由于面传感器组建的检测对象是弓箭集合体,所以我们右键选择传送带,选择修改将可由传感器检测参数 取消,调整视角, 这样我们就创建了新的传送带组件,导入了传送带模型,将工件几何体放置在了传送带上,同时添加了传感器组件。
128工业机器人学习交流 02:19查看AI文稿AI文稿
02:19查看AI文稿AI文稿工业机器人编程 abb industrial robot 第十八章 abb 工业机器人 robots studio 可动工具的建立 首先建立一个空的工作站,导入模型,选择建模,建立一个急转的一个矩形,选择模型,把它与正方形对齐,选择三点法, 选择移动指定,把模型移动到可视空间。设置工具首先我们先要把工具进行一下分类, 把工具分为三部分,左左右转,还有基座 至节点 l 一, l 二, l 三, 设置接点,选择旋转的,选择两个轴的端点 一,另一个爪的参数 选择工具数据 定义工具坐标系,选择重心,把它放在中心位置和边翼。机械装置选择添加选择我们需要添加的姿态, 完成可动工具的设置。
 02:32查看AI文稿AI文稿
02:32查看AI文稿AI文稿哈喽,大家好,这个视频呢,我们来给大家讲一下如何给机器人添加工作站,也就是说我们如何添加虚拟的睡觉器。这个视频呢有点长,需要耐心的看一下, 我们前面讲了怎样添加机器人和工具,而这个机器人呢,是没有灵魂的,我们如何给他添加他的控制器,睡觉器,我们点击机器人系统。 那前面两个是上个视频讲的啊,第,今天我们点击第三个机器人系统,然后呢,我们点击同布局, 注意从布局里面呢位置一定要选一个没有中文路径的文件夹啊,中间一个汉字都不能有,有的 的话会报错。我这里呢就选 c 盘了,随便默认了个位置啊,因为怎么说呢,这个东西占用的空间很小啊,十几兆啊,或者说几十兆,所以说 c 盘我给的空间足够大,这个也无所谓啊。 好,我们点击下一个,然后呢,这个就是我们当前空间中所含有的机器人的型号,所以因为只有这一个,所以说没办法去选其他的,点击下一个。 好,在这里面呢,我们需要选项选一个,需要点击这个选项, 点击选项,我们点击第一行,把 english 给勾掉,选择 chinese, 这就是把英语改成汉语的意思,当然 如果这一步不选的话也没关系,我们看我前面的视频呢,教大家如何在社交器中改汉语,一样的 点击确定完成。好,滚动条开始走了,我们的控制器状态,右下角这个控制器状态呢,由红变黄再变绿,则为建立成功,现在是正在启动。 好,现在看呢是已启动建立成功,然后我们点击我们的控制器,点击试驾器,哎,这就拿到了, 会不会发现这个社交器呢?和现实版的社交器是一模一样的,怎么样?有没有学会?
19跟着学渣学编程 00:48查看AI文稿AI文稿
00:48查看AI文稿AI文稿这是一台 a、 b、 b 机器人,这是西门子 p、 l、 c, 这两个到底有什么关系呢?相信很多学习电器自动化的人都会有这个疑惑,其实在自动化产线里面,他们需要连接进行通讯,相互交换信息来更好地传递和完成任务。 plc 告诉机器人去把这个给我搬运下来,机器人去执行任务,执行任务之后再返回给 plc。 老大我任务完成了。 通过这样的交互通讯,机器人就可以作为整条生产线的一个员工和其他设备共同完成这个生产任务。接下来我就给大家分享一段更换 plc 以及通讯连接的过程,最终实现机器人自动抓取,感兴趣的同学可以期待后续更新。
473小小工程师 01:25查看AI文稿AI文稿
01:25查看AI文稿AI文稿abb 机器人仿真软件,仿真软件模型库,把它点开,他有不同型号的机器人,还有一些喷涂机器人的各种类型变味机,这边还有导轨模块定位安装有两种方法,第一个呢就是我们通过这个箭头拖拽过来, 第二种呢就是用两点法来做,点击这个基础模块,然后位置放置两点,然后呢我们要把这个模块的底面朝上, 我们选中这边的捕捉中心,然后选择第一个框,出现这个小圆点之后点击一下,在第三个,然后选中这个点一下,我们再去找实训台上他要放的位置, 那我们以这两点为例来做,先选择这个第二个框,然后出现这个小圆点,点击 最后一个,那就是这个位置了,然后我们再点击一下,最后我们点击应用, 这个模块就安装上去了。常用快捷键平移,我们按住 ctrl 键,然后加鼠标左键,它就可以平移我们这个工作站了。旋转,我们同时按住 shift, ctrl 键加鼠标左键, 他就会旋转我们这个实训台。放大缩小,我们可以通过鼠标这个滚轮呀,这样放大,然后缩小,明白了吗?
313机器人小王老师吖 07:13查看AI文稿AI文稿
07:13查看AI文稿AI文稿我来给大家介绍一下,怎么在 robo studio 二零二一里面创建一个带 visa 的协作机器人的仿真工作站啊?首先点击新建,选择空工作站,然后点击创建 好,点击创建以后呢,我们第一件事啊,先确认我们安装的时候所用到的那个,呃, 哪些软件先准备好,对吧?在这 air ins 菜单里面呢,我们来看看左边。首先 robo where 必须要有的, 必须要先装好了,对吧?另外一个呢,还有 v 扎, v 扎现在有更新的版本哦,在这里对应的,我刚才查了一下,是一点二的可以装,然后呢,我这是一点零一级装这个也是 ok 的。 那然后的话呢,我们呢,先来看看这个,大家可能会说,呃,怎么打开没有四角七啦,会怎么样的呢?我们在这里安装的。那我们要装这个怎么装呢?右键在这上面,右键点击安装 好了这个就安装我们的这个四角器的一个安装的一个东西。那如果不需要安装的话呢,我们就启动就好了,那我们不需要启动,要不我已经装好了,所以他就要问我要不要重新安装,我就不重装了。 那实际上的话呢,在这里我们看到啊,如果你们没有 lobby 的话,就在这里选对应的 omego 的这个,他就新的版本,让你去加去装。然后呢,点击这个啊,这里如果没有装的话,比如说我没有这个版本,他就会让你说添加再添加就好了,当然建议用最新版本。 好了,当你这个 robo via 跟这个 visa 都准备好以后呢,就在这里搜索去安装就好了。都有了以后,我们回过来,在控制器这里选择这个安装管理器, 安装管理器七啊,记得要我们这里新建,点击新建起一个名字嘛,然后呢,我们就做示范,好吧,我就起个这样的名字,然后点击下一个, ok, 我们这里要选择最新版本的,点击最七点二是最新的就好了。下一个这里的话呢,我们来看一下啊, 这个我们要添加,有几个东西都要添加一下,就是这里,哎,我们这里点打上那个显示最新的就好了。 facependon software update, 这个要装的要最新版,这装了以后才会在这里出现,对吧?这个要确认一下这几个东西, robot control 要有的, robot os 要有, robots 又有 robot where installation utilities 要有, visa 要有。好,你看看这里缺了什么,一二三四五一二三四五。这有就多了, visa, visa 没有,对吧? 微撒的话呢,我们就把它选上,这样子才能确保他有微撒,对吧?好,下一个。好嘞,这里的话呢,我们来看一下啊,这里就没什么了,确保微撒在这里,如果 ctrl 在这里,如果在这里就好了,因为添加也没什么好。添加了,在这里,然后点击下一个 好选项,这里不要注意啊,这里的话,因为我们要进行一些编程,对吧,我们选上我们有必要的一些选项,我建议是这样的, perfect 呢,可以选上 device 就好了。 pop in that device, 然后的话我看看。 motion performance 这里不用 motion separation 不用哎。 what? 数文可以考, 可以选上,好,我看看还有哪些必须要选上的啊啊? multitasking, 把它选上。 communication 这里,呃,也可以没有 呃,然后的话呢,我们选项这里啊, lobo studio connector 可以选一下,就以防万一而已了,这里就把这个 program program page 全要选上, okay, 还有 engineering 的这些好像应该下面就没什么要选了。好,这里确认好以后了,我们看看了,关键这里选传动模块好,选哪个,到时候就打开了这个选项跟哪个机签,呃,匹配就是用哪个机签呢。我们现在啊这一个版本里面的话呢, 哎,我建议你就先用这个幺四零五零的,哎,要因为呢要支持到一万五跟幺幺零零的话呢,就能打开试打开试教器啊,要在下一个版本,这个版本呢,应该大概在二零二 一年的五月初的时候就支持了,也可以用那个重点提醒大提醒一下大家,如果你们用一万五来做这个仿真和做指令的话呢,其实,呃更容易获得裁判的 喜欢,我,所以呢,可以到时候呢,但版本升级了以后,你可以装这一万五针对一万五来做一些仿真,然后针对他来开发这个指令,对吧, 这样子演就更好了,因为我们题目有两部分吗?对吧?好,我们这里就选这个,哎,哎呀,幺五零,幺四零五零,这个好,选好以后就下一个,记得在传动模块里面选这个,你选择幺幺零零也可以,幺幺零零是普通的工业机器人而已,下一个。好,这就选好了,选好以后呢,我们点击应用, 点完硬后以后呢,就把这个安装管理 g 七关掉,关掉以后呢,我们的基本 里面呢,我们就导入这个机器人导入方法就不不用从这里了,因为我们刚才已经在那个呃系统里面指定的机器人型号,所以在虚拟控制器里面选择总现有控制器。还记得刚才的名字吗?叫做这个示范,对吧?好,点击确定。 这个时候呢,我们在等待这个系统启动完成啊,我们就选这个第一个机器人就好了。好,点击确定。 右下角这里呢是黄色,我们应该是等到绿色证明这机器人启动好了。机器人启动好以后的话呢,我们就可以,哎,多放他的位置啊,其他的话参考罗布斯丢丢的一个操作,说明你移动他以后,他肯定会要让你做一个确定的。我们来看看这个啊, 看看这个。呃,在本大本地坐标的话,我看要移动他的话呢,肯定他会问你一个东西。我们先不看这里,我们先看看视角器吧。关键的地方,视角器 好,打开试教器的话呢,我们他应该第一次打开,他会呃,英文的,那我们改成中文对不对?中文在 setting 这里面,我们选择这个 language, 能改吗?我看看啊,不能改啊,状态没调过来。好,在这里呢,我们改成 menu 手动,在这里有个快捷键, menu 手动,然后电机关闭, motors off。 好, chinese, 点击 apply yes, 好,这里。这个时候的话呢,我们重新打开视角器, 他就变成中文了, 我们来看看啊,再关一次,再打开一次, 这个时候我们看到是中文的,对吧?这个时候呢,你看 visa 就在这里了,这个时候呢,你就可以在这里,呃,去运行 visa, 并且这个 skill creator 的话,之前有别的视频,在 bilibi 里,包括我的视频号里面都有这个相关的视频,可以查看它就知道怎么去做了。好,这个环境就搭建好了,剩下就靠你们来发挥你的创意了。
62叶晖yehui


