smart200支持总线控制电机吗
粉丝149获赞788
相关视频
 05:08查看AI文稿AI文稿
05:08查看AI文稿AI文稿不用指令如何让 s 七杠一二零零与 smart 两百走 pn 总线通信? 如果你想快速配置 smart s 七两百与 s 七幺二零零通过以太网轴 p n 总线通信,则可以通过以下步骤学习,一、学习目标,让一千两百 p l c 通过网线及 p n 总线收发数据给 s 七二零零 二组网配置,由于一千两百 p l c 和 s 七二零零的网口只有一个,所以需要添加一个工业交换机。 三、调试确认步骤一,打开 step 七 microing smart 软件软件版本 v 二点七。步骤二,双击 c p u s t 四零修改 p l c 型号和 ip 地址, ip 地址要和 s 七一千两百网段一致,我这边设置幺九二点幺六八点零点幺零,要和一千两百 plc 跟四伏器错开。 步骤三,打开工具,选择 profnat。 步骤四,勾选智能设备 下一步。步骤五,修改标识这个标识是指主 p l c 添加这个 p l c 时显示的名称可以使用默认的。步骤六,添加通信传输数据 添加两个,一个输入,一个输出,注意这个地址默认是 ibqb 幺幺五二到 ibqb 幺二七九共一百二十八个字节,如果不在范围会报错, 我们先测试四个字节。步骤七,点击导出,注意导出的文件夹位置等会主 plc 需要导入。最后点击生成。 到此, smart s 七幺二零零 p l c 的配置已经完成了。步骤一,打开 t l partov 十七软件,我这里在上节课的基础上添加配置即可。 步骤二,打开选项,选择管理通用站描述文件。步骤三,选择刚才导出的路径,添加导出的文件,选择好后点击 安装,等待安装完成。 步骤四,打开设备状态, 选择网络视图。步骤五,在硬件目录中找到 other field devices, 找到 probenate io, 打开 plc, simmons, ag, cpu, st 六零,将刚才导入的定音文件添加到网络中。 步骤六,点击未分配,添加网络,选择 p l c 一到此, s 七一千两百的配置已经完成了。步骤一,查看添加从占分配的 i o 地址, 双击打开设备状态,拉开设备盖栏,可以看到输出是 q b 幺幺二到 i b 幺幺五四的 字节,输入 i b 一百一十六道 i b 幺幺九四个字节,刚好跟刚才设置的对应上。步骤二,下载到 p l c 中。 步骤三,把 smart 的程序也下载到 p l c 中,注意选择正确的网卡。选择好 p l c, 点击确定, 点击下载。步骤四,在状态图标里添加 id 幺幺五二和 qd 幺幺五二,以十六禁止显示,点击监控。 步骤五,打开 s 七一千两百,选择监控和强制表。步骤六,添加 q d 幺幺二和 id 幺幺六,对应 mart 两百的 id 幺幺五二和 q d 一一五二。步骤期,点击在线监控。 步骤八,分开显示两个 p l c 监控的值, p l c 一二零零的输出对应的 smart 两百的输入,因此给 smart 两百的 q d 幺幺五二复制后, p l c 一二零零的输入 i d 幺幺六,会收到 smart 发送的值。 同理, p l c 一二零零的 q d 幺幺二对应 smart 两百的 id 一一五二给 p l c 一千两百的 q d 幺幺六复制后,全程每写一行指令就可以实现数据传输。四、总结。
646迪恩讲技术 06:42
06:42 02:15:20
02:15:20 01:11查看AI文稿AI文稿
01:11查看AI文稿AI文稿所有的西门子 p、 l、 c 都支持 profinite 总线吗?这个网络最多能带多少个站点?有没有办法扩展呢?接下来带给你 profinite 的几个硬核内容,先点赞收藏哦!第一, profinite i 是网口通讯,网口通讯会逐步的替代串口通讯。你看西门子 profinite 到 profibers, 三零 c c link 到 cc link r e 包括吉恩是在用 easternet ab, 汇川和欧姆龙在用 easter cat 都是网口通讯。第二, profinite io 支持全双供幺零零 m b p s 速率,最多支持八个设备站,而且网络中只能有一个控制器。 c p 又在做 profinite 设备的情况下叫做智能 io 设备。 这个智能 r 设备因为是 cpu, 所以它还可以再带八格设备展,这就是带下级的 profinite 控制方式。第三,不是所有的版本都支持 profinite 通讯, cpu 固键 版本必须为 v 二点五以上。 profinite 除了控制远程 al 以外,还可以控制 v 九零四伏和支持 profinite 的工业机器人、相机等第三方设备。 第四,每个设备最大通讯一百二十八个字节,存储到 i 区和 q 区的一百二十八点零到一千一百五十一点七。关注我,持续分享西门子 plc 技术!
229九方汇PLC编程培训 00:20查看AI文稿AI文稿
00:20查看AI文稿AI文稿西门子 p、 l、 c 外传家剖斐南从线一共能带多少轴?二零零苏奥远中 pto 定位用单项而输出分别是 q 零点零, q 零点一 只有零点三,一共三个没有定位模块。 pto 不可扩展,通过剖腹内按松线方式最多带八个次服用库指定 posi 定项目需要十二个轴,你怎么做?评论区告诉我。
 01:14查看AI文稿AI文稿
01:14查看AI文稿AI文稿啊?先复位啊,实灯首先点动模式,正转反转啊,回领模式设置 啊,我们定点 啊,点第一个点,第二个点 啊,第三个点 啊,第四个点, 咱们启动啊,切换模式启动。
212锦胜自动化PLC 00:25查看AI文稿AI文稿
00:25查看AI文稿AI文稿西门子两百 smart plc 采用四八五 modebats 方式控制英维腾斯服。位置一设定十万,位置二设定负十万,位置一启动, 位置二启动。
 01:12:43
01:12:43 11:19
11:19 00:43查看AI文稿AI文稿
00:43查看AI文稿AI文稿大家好, smc 的 popnite 总线法导啊,如何跟我们的啊?西门子 st 二零呢?做一个 popnit 通讯啊,首先第一呢我们需要用到一个交换机,第二呢一个 cpu 啊,一个总线法导啊,然后呢,咱们先演示一下啊,咱们先把那个前八个位给他零来把,把零给他给上来,让他先灭掉啊,先灭掉 好,现在灭掉了以后呢?然后我们让他第一个防倒的线圈的,两个线圈同时亮,井号二九幺幺 幺幺啊,好呀,是一个红灯一个绿灯啊,一块亮,是不是这样?是我们现在通上了啊。嗯,具体怎么设置呢啊?咱们下个作品啊,咱们详细的讲解啊,感谢您的支持。
 01:12查看AI文稿AI文稿
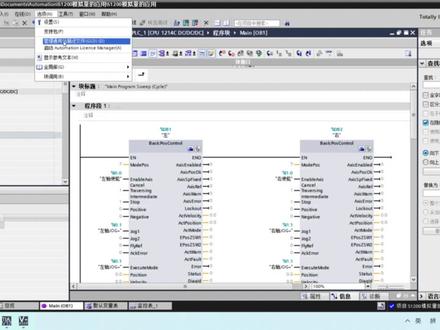
01:12查看AI文稿AI文稿好,大家好,欢迎来到万斯科技。呃,今天呢,我想给大家演示一下两百 spa 的皮尔西来控制步进电机的运动啊。我做的思路是什么呢?就是按下启动按钮, 按下启动按钮之后,呃,电机开始正转,当遇到限位之后,正限位之后反转。 呃,然后呢,就是当反转到反转纤维之后,再改变方向正转啊,就是这样的一个思路。 然后就是按下停止按钮,可以在任意位置停止,然后再按下启动按钮啊,还可以接着接着他的这个逻辑去运动。 好,按一下停止按钮,停止。好,就是这样的一个思路。呃,我是用的 pls 运动运动指令来写的。 然后就是如果你感兴趣,呃,也欢迎来到我们万思科技,我们一起学习探讨,谢谢大家。
44那又如何 02:02查看AI文稿AI文稿
02:02查看AI文稿AI文稿大家好,今天给大家介绍一下讲解一下我们国产 smart 系列的 plc, 基本上整个看起来其实就是整个使用都是完全兼容的,这是我们 sr 三零,包括我们的型号二八八杠 ysr 三零是完全兼容,程序通用使用也都是一样的。 然后这个是我们的 cpu 中央处理器,包括后面的 io 我们也是有的。然后现在这个 cpu 我们已经上电了,可以测试一下,然后上电这已经联网了,然后我们打开我们的 smart 软件,可以测试一下 它使用都是一样的,直接主探我们 s r 三零,然后通 ship, 可以看到已经找到了我们通讯,然后我们随便打开一个程序, 那我们随便打开一个成简单程序,他可以相当于直接我们直接对下载 带成功,然后我们在线, 所以它这这笔记本的整个使用是一样的,因为我们我们的推出的国产 smart, 它主要是为了方便咱们工程师, 相当于可以不用去学其他的编程软件了,这样使用起来更清晰,而且也可以直接完全支持混用, 这样的话使用起来也非常方便。







猜你喜欢
最新视频
- 2277枝白owo