西门子rtcp指令怎么用

粉丝2073获赞6753
相关视频
 00:12查看AI文稿AI文稿
00:12查看AI文稿AI文稿常见几种五轴系统,支持 rtcp 功能指令。
481西尔普数控机床厂家 09:08查看AI文稿AI文稿
09:08查看AI文稿AI文稿西妹子的时钟指令一共可以有,可以主要分为两个,一个是瑞达 gc 读取实时时钟,另一个是赛塔 gc 设置时时时钟,看一下读取时时时钟,他的一个使用没鼠标,我们键盘上点击 f 一键可以查看。帮助 瑞的 idc 是读取时时时钟指令,他就说从 cpu, 就是从 poc 的 cpu 内部读取当前的时间和日期,并将其载入从字节地址 t 开始的八个字节时间缓冲区内。 怎么理解?我比如说我用一个,比如说啊,我用一个 看一下时钟指令瑞达 tc 怎么怎么驱动吧,首先 把它拖过来之后,这里一,那么就是使能,需要给他进行使能这一个读取失失中指令才能激活我比如说我用一个 sm 零点五, sm 零点五 针对一秒的每零点一秒钟的时间内接通零点五秒,断开零点五秒, sm 零点五,加上一个上升眼, 好激活这一个雷达力。 c 读取实时中,读取实时中,这里刚才可以看到他的含义。 读取从 cpu, 就是说从 plc 内部读取时间载入到字节地址 t 字节地址 t 开始的八字节,这里就是 t 字节地址 t 开始的八个 字节,八个字节,那么字节地址 t, 我比如说写一个 vb 幺零,那么就是说这个指令激活之后,将 cpu 内的时间 给他传送到这个 t, 就是 v b 幺零指定的八个字节,那么就说 v b 幺零到 v b 幺七正好八个字节分别代表年月日十分秒,星期,那么就说明。以这样的话举例的话,就说 下方就是 vb 幺零,那么就是年幺幺,就是月幺二是日幺三是十幺四十分钟,幺五十秒幺 七,这里注意是幺七是星期,他这个幺六的话,就说 t 加六,这个是 t 吗? t 加六他是不起作用的。假设我这里写的是一个 vb 零,那么 t 加六的话就说 vb 六他是不起作用的。 t 加六, vb 六 他是不起作用的。然后 vb 幺零, vb 幺零的话,你看我如果写的是 vb 二零, vb 二零,那么这一个雷达力 c 独具实施中指令激活之后, vb 二零代表年,二一代表月,二二代表日,二三代表小时,二四代表分钟,二五代表秒。 然后 v b 二六是不起作用的, v b 二七代表的是一个星期。这里要注意的是,我在切换到 v b 幺零,这里需要注意一点,他这一个读取的时间信息都是以 bcd 码的形式存在的。 bcd 码,然后呢,我们在使用的时候需要将读取的信息,就说读取的 bcd 码转换成使劲制,那么怎么转化呢?我比如说这里一个用一个奥威斯奥斯,奥斯奥始终接通,始终接通,以未必要零开始,那么这个瑞达力 c 读 去实施中指令激活之后,那么 vb 幺零, vb 幺零以 bcd 码的形式转化成实际之数,那么需要一个这样的在这个位置转换指令, 字节到整数,我们先字节到整数,就说 bcd 码转换成整数之后, bcd 啊到二, 好,这样的两个转换之后,那么这一个 bcd 码就可以转化成十斤之消息了啊。看一下,比如说这个位置,我们用一个往这里来一点,这个位置,比如说是未必要零, 未必要连号,他是年年转化成,那么转化成整数为 www 一百,比如说 ww 一百,那么这个位置的话,我可以写为大,也是为大 一百,这里转化成 vw 二百。好,这样的话就可以一次力推了。然后我们把月可以看一下,把月日给他写上, 直接复制吧,康康锤加 c 复制, ctrl 加微粘贴 好。后边的话都是一类似的情况,我就不接着写了,然后以此类推,这里 v b 幺零是你,然后是 v b 幺幺是越 v 幺幺的话,比如说转化成这里用了 v w 一百了,那么下面写 v w 幺零二,然后这里是 v w 幺零二, 转化成一个 vw 二零二,然后这里是 vb 幺零幺零是年,幺幺是月,幺二是日,那么 vb 幺二是日。 vb 幺二转化成 vw 幺零四, 然后 v w 幺零四转化成 vw 二零四。 好,然后之后以此类推,让我们写上一六,这样的话就可以显示了。年月日。现在我写完了年月日这一个程序,我看一下写到 poc 里面是否能读取出来 cpu 的年月日呢?看一下, 进行一下飘 c 的通信。 好,下载到票 c 里面 后,进行一下监控, 可以看到他现在是零幺幺,哎,和现在的时间二零二二年八月十五日不一样,为什么不一样呢?看一下, 因为我们没有再进行这一个时钟设定,因为我这个飘 c 已经锻炼很长时间了,一直没给他供电,那么我们在时间需要设置一个时钟,设置一个时钟,你看现在的设置时钟未设置,我们读取, 读取 pc 就是读取电脑的纸号。二二年八月十五日二十二点三十四分。好,现在设置,再把这个程序下载到 pc 里面看一下, 这里就出来了,你看这是三十四,你为什么是三十四呢?未必,幺零是三十四,他读取的是 bcd 码,最后转换成了二十二,那么八八二十一转换成十五,那么就是二二年 八月十五日。好,这样的话就没问题了,我们接着下,接着往下写看一下。那么这样的转换完了之后,那么我们就说,如果假设在出问题上显示的话, vw 二百,他是你, vw 二百零二,他是月, vw 二百零四,他是日年月日。然后小时看一下,我接着往下写,下小时,以此类推。 小时 vb 幺二,完了是 vb 幺三,这里是写一个 vw 幺零六,然后 vw 幺零六转化成 vw 二零六。 好的,写进去看一下, 看小时出来了,二二年八月十五日二十二点,以此类推。这就是时钟指令的一些简单的维达利 c 读取时钟指令的一些简单说明。
147自动化小白成长记 01:42查看AI文稿AI文稿
01:42查看AI文稿AI文稿首先我们要均打开当前我们运行的程序,是吧?打开当前我们运行这个程序, 我们确定我们是在哪个大号前面放标,在这里按一下这一个,其他 一个高速设定,高速设定这里有两个,一个加工等级可以切换的,有一个三角形,两个三角形,三个三角形切换工差的话是根据我们做产品或者做零件的工差一般是到 一个丝或者是程序功差的一点二倍来设置,最小可以设到零点零零一个喵,确定好以后按下接收, 这样就多了一个赛克八三二指令,这就是高分高清指令,刚才我们讲了怎么来添加高分高清, 现在我们角落要改变他的加工等级,怎么来操作?这边一个相遇的箭头,我们按一下面板上面一个相遇的箭头键,进入这个画面,现在我们再来更改他的一个加工等级,一个三角形或者工差,零点零零二 接收,是吧?这样就改变他的一个等级。还有我们叫他告诉个人指令以后我们怎么把它取消掉,怎么关掉他,也有两种方法,一种是还是按下这个相遇的箭头, 按一下这个取消选择,按一下接收,这样的话零零幺就表示刹车靠近已经关掉了。还有一种最简便方法,按下编辑,编辑里面装备,在这里按下剪切这一段,这一段指令就剪切掉就没有了。
360百益成科技 01:15查看AI文稿AI文稿
01:15查看AI文稿AI文稿西门子如何输入吊刀质量?首先哎打到 mdi 点亮它,然后输入 m 六 p 三有三号刀,然后直接按咱们这个循环启动。 注意词,注意的是这个主轴必须是在呃启动状态下,还有这个静给也必须在 在这个开启状态下,否则他会起床是不会运动的,这样的话他才能完成一个 换刀动作,否则他会不完成 这个这个键一定要开启主轴,还有这个主轴转速,还有这个智能保持这个。
25最美芳华强哥 07:20查看AI文稿AI文稿
07:20查看AI文稿AI文稿今天我们讲一下西门子 plc 之间的葡萄干的通讯,葡萄干的通讯是一种单边通讯,单边通讯也就是说持续在 一个 plc 里面写程序,就可以完成两个 plc 之间的数据首发的通讯。以两个幺二零零 plc 为例,分两种情况,一种是两个 cpu 在同一个项目, 另一个情况是两个 cpu 不在同一个项目。首先我们来看两个 cpu 在同一个项目里面的情况。先建立一个 x 七链接, 在网络视图里选中链接,在商人框里边选择 s 七链接,从 plce 的 接口拉出一根链接线,然后链接到 pc 二的中间的接口,这个时候呢就完成了一个 s 七链接。在右边的 链接里面可以看到已经建立了一个链接一,这是两个 cpu 都在同一个项目里面的情况,如果两个 cpu 不在同一个项目里面, 这个时候也是选择链接,在下拉口里面选中 s 七链接,这个时候选择需要 c 一的 propet 接口, 拿出一根链接,然后再回到 plce 的找回来的接口,双击就完成了一个链接。这个链接是 没有指定远程伙伴,所以说在连接二的属性里面是需要手动输入远程伙伴的 ip 地址,这个时候就建立了一个 未知伙伴 s 系列。然后要记住两个连接的 本地 id, 这个 id 在程序里边是需要关联到指令,所以不同的链接有不同的 id 号。 在远程通信伙伴的 ps 属性里面,要勾选允许来自远程对象不能盖的房子,这个时候才能进行正常的通行。 以上这些是网络组态的操作过程。 接下来我们开始写程序,在写程序前,首先在 pc 一里面建三个地皮块,一个地皮块是数据块 pro 水平块, pro 主要是发送数据的月亮电梯可以建数字,不同类型的数字,波尔型、字节型、 字型、整数型、实数型都可以,并且需要在属性里面去掉优化的块儿范围,因为在 在这里面需要绝对地址。顺着库尔盖特也是同样的情况。 再建一个数据块, alt 里面建两个结构变量,结构变量主要是 pro 的 get 指令输出变为壁纸,主要反反映指令的完成状态和错误状态。在 plc 二里面也建两个数据口 数据块 pro 的 get, plc 放的数据块 get 对应 plce 的数据块 put 长度 类型要一直属于块 put, 对 prce 的数据会 get, 类型和长度要一致。 接下来我们看程序,首先添加扑特指令,在扑特指令里边主要有四个输入参数,三个输出参数。 输入参数 i q 是触发指令上升沿触发,所以我们需要一个脉冲性 选择系统始终的五赫兹。原来 id 呢? 选择一百 a, d、 d 二为远程通讯伙伴 接收数据的指针区域格式五 p 井号 d b, e, d x 二点零空格。另外体力空格 成都市 sd 为本地 plc 存放数据的指针地址。歌手 p d, b 五点 d, b, x 在这个格式里面, db 一点 dbx 二点零是指针的起始地址。 b、 y、 t、 e 是数据类型,否则盖的指令不是所有的数据类型都支持, 需要注意它支持什么样的数据运行。接下来关联变量的输出定制,输出定制在我们刚才已经建立的结构变量里面 去关联,这时会在这里变量一定, 如果需要通讯不同的数据类型,可以增加通讯区域,在 addr 里面添加另一段通讯区域, 这个时候又增加了一个通讯区域,每条指令总的通讯长度为一百六十个字节。接下来我们关联 get 指定的变量, 如果需要增加通讯区域,和破塞指令一样,这时破塞盖的指令就已经完成,可以进行通讯测试。今天就讲到这里。
600南京宁工科技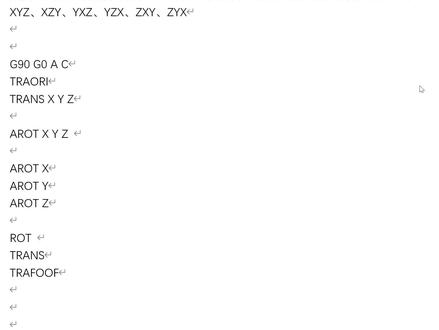 06:59查看AI文稿AI文稿
06:59查看AI文稿AI文稿西门子八四零 d 目前定导指令用的是塞科八百,这是新的指令。以前西门子老的定导指令是 a rot alt。 使用的话有这么几个要点,第一,必须要有预定位, 也就是说 aerot 没有刀凿摆正的功能,只能旋转坐标系。第二个, aerot 没有平移功能,如果要把坐标原点平移,必须搭配圈子指令。 所以说这个 error 的这个 a 是指在平移的基础上 再旋转,那这个 a 的意思就是 additional 附加的。第三个 air rot 跟 slag 八百不一样, slag 八百有刀尖跟随功能, 也就是说能追踪刀尖,坐标系始终跟随共建 aerot 没有这功能,所以 aerot 必须要搭配 churan 这个联动指令。第四点, aerot 如果写一行 x, y, z 分别代表绕 x 绕 y 绕 z 的旋转角。写成一行代表 x, y, z 顺序的空间角, 也就是 z y x 顺序的泰特布朗九。如果写成这样子的话, 是 x y z 顺序的泰特布莱恩奖相当于 cygarbaby 的五十七号。 写成一行相当于 cycle 八百的二十七号。当然,如果分行写的话,不一定是 x y z 顺序了,也可以比如 写成 y x z, 那这儿就是 y x z 顺序的泰特布莱恩角。 也就是说,如果分行写 分三行写的话,就是按照写的顺序的泰特布兰角。写成一行,一般都是 x, y, z 顺序是空间角。 最后取消的话,写 road chance 就可以把坐标系平移旋转取消掉了,最后再运行这个指令,取消 try。 虽然现在西门子系统基本上大家都用 cyberby, 但是在某些特殊的情况下, 用 aerot 去做定轴可能更方便,比如双摆头、龙门吉双,很多后处理 都喜欢用 a rot 做定轴,为什么呢?其中一个主要的原因是,比如 c 正负三百六十度, 假如是 a c 双百刀,那么计算当 a 取一个正,对于定招加工来讲, c 还有两个 g。 如果用 cycle 八百比较麻烦, 其实也不是很麻烦,就是三个八百,这时候不能用于刀招摆正,因为这时候刀招摆正要转 a, c, a 取定了一个方向, c 还有两个结,所以三个八百不能用于倒倒白正。因为三个八 本身他说的双节是指 a, 不是 c 管不了 c, 所以用塞个八百的话,只能让塞个八百单独旋转坐标系,不能做倒车摆的。也就是说塞个八百之前必须要有预定位, 旋转轴的预定位,再加上塞个八百本身参数是比较多的,很长, 用起来其实不是非常方便,所以双百刀龙门机床往往化繁就简,干脆就用 air rot。 air rot 相当的简洁,就萨克萨斯 arrow 的,当然也需要预定位,无非是再多一个 churide 指令, 那看起来比用萨克爸爸要简洁的多,当然呢,还多个圈子指令,总而言之,简洁的很多。 加预定位的好处是什么?避免了 c 的双截。取哪个 c 的结由预定位的这个 c 值决定了, 也就是在预定位置上就决定了 c 区哪个结,而不是由系统 cycle bubble 去决定 c 结,因为 cicle bubble 他没办法决定 c 是哪个结,他只能决定 a 是正还是负。其中一个结, c 出现双结 无能为力,那 c 出现双解的话,他可能取得这个解跟你要的 不一样,这就会出现很麻烦的局面,造成双百头龙门机床撞击的话,那是相当的可怕,损失也很大,因为双百头的龙门机床,那个百头造价不飞的, 严重的话撞一下修一下十几万。所以双百岛农贸集团做后处理还是比较复杂的,要考虑的东西比较多,因为主要的原因是 c 不是无限制旋转的,那么一般在正负三百六十度范围,这个是最多的 a 确定正负以后, c 本身还有两个角。呃,这问题就比较复杂, 有些初学者把摇篮机床的后处理改一下头尾,改一下 a、 c 轴的行程,就把它用于双摆头龙门机床,这是相当危险的做法,处事是必然的。
526海滨仲夏夜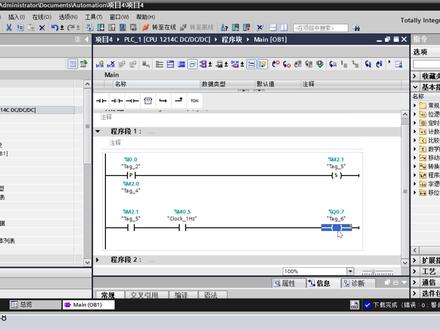 13:22查看AI文稿AI文稿
13:22查看AI文稿AI文稿大家好,这期呢接着上一节呢继续讲解这个基本指令的一个使用,然后这节呢主要通过一个例子来给他去讲解一下程序的设计方法,当然这个呢仍然是处于基础的一些教学。 那么先介绍一下三种触电指令的一个区别啊,大致说明,第一个呢是上身眼触点指令,那么这个触电指令是针对于某一个触点,也就是不而量所对应出现的上次炎,也就从零到一的跳变之后出现的上次炎。 第二个是线圈出现的那对线圈的一个轮流的一个长时间的出现,那么这个线圈的上面的地址呢,会输出一个周期,也就是如果说写成这个样子线圈的这个长时间的话,那么 m 六点一会输出一个周期的 这个上身眼的线圈的检测。第二种呢,第三种呢是这个轮流之间的上身眼的检测,也就是当这里边的 i 一点零跟 i 一点一, 如果两个逻辑运算结果出现了从零到一的挑扁,也就在这里边的 ceo k 前端这个地方出现了零到一的挑扁,那么后边的这个 m 八点一会输进行自稳 啊,说他检测的是前端的轮流的从零到一的调变,出现了上震眼到下面的检测,是下检验的出现啊,这是三种的这个边检测之零的一个区别, 下面我们讲一个例子,这个题目呢可以直接看一下,那么这个题目当中所描述的意思,如果说我们拿到这样题目之后,进行程序设计的时候,应该怎么去做?在 ps 整个程序设计的时候,关键的思路是什么呢?其实 是逻辑思维能力的培养,就是我们要有一个非常严谨的逻辑思维方式啊,那么在拿到这样的题目,或者是我们在企业当中接到这样的一些 啊,只是和要求之后该怎么去做?其实不是把他说的这个功能先听完,然后整体整体去把握整个程序的一个思路的写法。其实这个词呢,对于一个初学者来讲呢,没有必要这样去想。初学者来讲呢,我认为是 将整个项目来进行分解,怎么个分解法,就按照你怎么会怎么分解,其实怎么其实怎么分解都是可以的,分解到你后面会为止 啊。比如说像这个题目本身来说,我们可以一句话一句话的去读,不要第一句话射击故障显示电路,这句话读完之后对于程序斜切来讲是没有任何意义的, 因为你没有在成语当中去描述这个,是不是没有办法去描述这个,大不了就在备注里面注视一下,说明一下,第二句话就有意义了, 从故障信号安定零零的上身眼开始,这句话如果说在程序当中怎么去描述这句话呢?安零零零的上身眼开始明显要用到什么批出点啊?因为他检测是安零零的上身眼,说明在软件当中应该怎么去写呢?一个上身眼的指令, 上次演的简简直是点是谁的?上次演的是爱你的,你的上次演就是出现了,然后下面呢,要对对这个爱你的这个状态进行重组,比如说我们 m 二点零 啊,随便写了一个,这个给你描述的就是我们这里面的什么呢?这边的从故障信号安定的上线开始, 对吧?然后呢我们接着往后写,其实呢,我们在程序写的时候呢,你不要怕他错,写完之后再去看他有没有错,扣你 点七,也就是说当他上次已经开始就扣六点七了,就应该以一赫兹的频率闪烁。好,这里边呢,这句话的难点在哪里呢?就是这个地方的闪烁,对吧?一赫兹的闪烁怎么做?当然你可以通过在我们后期学的电视器去完成, 但是呢,在整个的这个呃播出软件当中,当没有那么复杂的,就他是有自带的时钟的一个闪烁频率,通过右键属性点击这当中的系统和时钟存储器,点开之后会有两部分,一个是系统存储器和一个是时钟存储器。 那么今天先讲下面一个,我们勾选启用使用存储器的字节,勾选完之后呢,下面会有一个相应的地址,这个地址呢是 mbx 的告示, mbx 的指的是中间存储的一个字节, 我们 x 是多少的?是零啊,我们这里写的零,所以相对于 mb 零, m b 零有哪些组成呢?有 m m 零点零到 m 零点七组成一个 m b 零说了,就包括 m 零零到 m 零点七 八位,这其中每一位呢对应的这个频率值都不同,这个频率是有系统自动给的,所以当我们点击确定我们一号值在这里有,就是 m 零点五, 对吧?我们点击确定好,现在我们的始终就有了,那么是多少呢?是 m 零点五。那么计划在刚才的题目是什么呢?当我按零零零上次眼开始那么扣零点七,是不是他有个扣零点七, 我们可以直接先写上扣零零七,然后呢?要以什么?一赫兹的评论上说,当我这个点出现之后呢?然后呢出现了 m 零点五,是吧?一赫兹的评论 按道理来讲逻辑是一样的,但是我们去想一下,这样的程序写法是不对的,原因是什么呢?因为我这里是上身炎,也就是从这一点开始,他的逻辑输出来其实只有一个周期, 一个周期的点加上一个闪烁的点,最终输出也只有一个周期,最多其实他能不能输出一个周期,这是不一定的,对吧?当我这个地方的这个上层以后,这个上层要如果说啊,当正好他这边一对一的时候,一加一才有可能最终输出一等于一, 是不是?所以到这里边这个逻辑状态怎么办呢?我怎么才能让他直行闪呢?必须前端一指为一,向的是一加上闪烁,最终结果才是闪烁。 说的话,我们直逻辑虽然是这样,但是我们直接这样写是不对的,没法自行闪烁。从我们这地方来先出出一个中间点来赞成一下刚才的状态, 也就是说我要先把这里边的这个状态存起来,就是故障信号,按理年龄上升延开始这个状态,先存一下,先保存起来,用周围整理进行存储。比如说 m 二点一 啊,我们刚才是二零零二年二点零了,那么现在这个所描述的意思是当我安利人帝豪在上千年开始之后呢?那么对 m 二点一进行了自毁,那么现在 m 二点一就一直是一,只要我们有遇到负责人,他就一直是一啊,那我们下面接着写, 假设我在这个 m 二点一的情况之下加上闪烁,对吧?我们的目标还没有实现啊,要让他闪烁 m 零点五,对不对? 这个是一指闭合的,但是这个闭合是有条件的,当他上层眼出现之后,对不对?他闭合,他接通,接通之后这个是闪的,这个一直是一加上闪,最终结果肯定是闪,对不对?而且呢是以一号这个平台闪烁说这个地方输出扣零点七, 看我们先这样写上。好,那么对刚才的这个 题目的要求呢?就基本实现了扣零点七,是不是?然后呢?一直只是在那一或者的平均上说,现在完成了操作人员按复位按钮,按零点一之后啊,就和下面的十一图也可以看到二零零一复位按钮在这里出现了之后, 那么正常情况之下呢,应该是这个故障灯呢?应该要消失,对吧?从最后面的一句话理解啊,如果故障已经消失了,这指示灯呢? 应该熄灭,那么我们回到里边的这个程序该怎么去写呢?怎么就是让这个灯熄灭了?如果单纯为了灯熄灭的话,其实比较容易的,怎么呢?我只对前面这个地方,如果说打开的话,也是 m 二点零进行复位,只要一复位之后,他变成零零加上闪烁,最终结果是零, 对不对?说了,我们先写一个复位点,这个复位点的条件是谁呢?是 m 点一复位,然后我们对他进行复位, m 二点一,可以看到现 这功能是不是实现了,对吧?他实现了。好,我们回答刚才的这个要求,这这个地方实现了,如果说当我复位按钮按下去之后,是不是如果说故障没有的话,那么这个故障是消失的,得灭了。 但是下面一句话,如果没有消失,这种指的是谁?如果没有消失,这句话说的是谁?就说是安定年龄,对不对?也就是相当。最后面的意思, 如果二零零他还是一直是一,对吧,也就是这上面的啊,这里边的二零零零一直是一, 那就是没有消失了。在这种情况之下,看这个条件,这句话的条件是当你爱你的你一直是一,而且呢,我按下复位按钮的情况之下, 对吧?这个手指示灯应该转为常亮,应该转为常亮,比如说他不要再闪了,转为常亮。就这里面的这个地方颗粒点气要转为常亮,用不同的状态来表示,那么这个时候应该怎么去设计他先?第一个问题是他在什么情况之下才转为常亮的? 先不要看怎么去实现产量,至少我们要先搞这找到他的条件是什么?就是导致产量的条件是什么?导致产量条件是什么呢?就是安利的零唯一。 同时呢,我们这里面的 m 二点一是什么状态了? m 二点一应该是处于 零的状态,是不是零的状态?也就是说在 m 二点零,如果说我对他进行呃,复位之后啊,他其实他前段是一样, 他为什么前端会是一呢?是因为我们在前端这个上身岩出现之后啊,就对他进行了质位,对不对?我们刚才的程序说这个地方的这个 m 二点一一至是一,所以我们这里面找的话,你看这里面这多加一个就是 m 二点一的状态, 当案例里零为一,我按一下复位按钮,这个时候呢,其实所谓的 m 二零一呢,应该是零,对不对?在零的情况之下,那么这个时候我们所看到的扣零点几才为一直是 转化为常量了。那么在程序当中如何去描述这个呢?应该是怎样呢?我们单独写一个,我们单独写一个以后,第一个条件呢,一定是要在 m 二点一四为零的, 稳铃的有长臂点,为什么会是这样子一个长臂点?因为我们按一下二零零一之后,我们知道他是都会在进行复位的,对不对?在这个词语当中,前端的词语中是不会变成零的, 按下就是他会变成零,对不对?复位了,他是复位了,变成零了,也就是相当于我这里的哪个条件呢?按下了按年龄,对,按下按年龄一致,会会导致的结果,其实就是这个结果, 两百二零一变成了零,所以我就直接拿这个结果来取就可以了。同时呢还有一个条件是 a, 你一定要是一, 爱你的你一定是有心意。那么在成语当中怎么去描述呢?敞开点,爱你的你一定是一, 就是这样。那么在这种情况之下,应该不要直接闪烁了,要输出什么敞亮扣零点七是吧?我这条程序当中是不会让他闪的,他是没有闪的,对不对?但是呢,我们看一下这个功能啊,所有的功能都 不玩了,是不是只是故障的消失,也就故障的消失,就是意味着当 id 年龄为零的话,那么他要断掉了啊,那么我看一下这个程序,如果案例年龄为零,他是不是就可以断掉,是吧?好,那么程序是不是设计完了呢?其实没有, 因为这里出现了双线圈,在整个成语当中双线圈的出现是不允许的,因为双线的出现呢,会导致我们扫描周期的是从上扫到下的,最终的少,最终成语少的时候是少的是这条程序,那么输出的时候是这样的一个状态,就说最终扫到的这条程序他是零,那么这种输出就是零,超少的是一,他就 高就输出是一,他会靠上调程序上面的结果呢进行了一个覆盖,那么两个扣你脸清,那不行, 怎么把它合成一个呢?那就比较简单了,应该来说用什么方法呢?把它并连起来,把这个呢,我把它先复制下来,这是上面的那两个之间 一并联之后,同时输出一个坑里的七,不就问题解决掉了吗?然后把上面短成一段删掉,好,这样的程序就做完了。然后呢 可以通过如果说你有设备的情况之下点击下载,如果说没有设备的情况之下点击仿真,启动仿真 啊,然后呢在这里边呢,可以可以对整个程序来进行一些监控和一些操作,可以去验证一下这个程序的正确与否啊。那么这一节呢,这个内容呢就讲解到这里了,其中这里边要注意到一点,就是 当我们对这个 cpu 进行设置之后,一定要将这个 cpu 点到之后呢进行下载,否则的话这地方有可能会引起不闪烁, 引起不闪烁啊,也就说你写了程序,如果说直接点到这里面的程序进行下载的情况之下,有可能没有把这个 cpu 的设置下载进去,那么最终的结果是无法闪烁的啊,所以一般情况之下要对这个设置来进行下载啊。今天这一节讲到这里。
287火山哥 05:22查看AI文稿AI文稿
05:22查看AI文稿AI文稿西门子的 churide 指令是联动指令,这儿我们主要讲一下 churide, 它还有一种特殊的用法,就是加个括号,里面写一或二, 表示转换编号,一或二 choi, 一表示激活方向转换为一。那这个是怎么用的呢?我们举个例子,比如六凿机床, 这个六道机床, x、 y、 z, a, b, c, 我们看看 b 是什么?正负一百一十度的摆头, c 是什么?正负二百二十五度的摆头, b、 c 构成 双摆头。再看看 a 是什么? a 是转台,绕 z 轴的转台,因为 c 已经被摆头占了,所以他不得不叫 a, 只能叫 a。 那这三个旋转轴只能两个旋转轴进行联动,三个旋转轴联动没有意义的。 如果 b 和 c 联动,就是 b、 c 双摆头进床。 如果 b 和 a 联动的话,就是摆头加转台起床。 一种是 b a, 一种是 b c, a, a 和 c 联动没有意义,因为 a 和 c 在这儿都是绕着 z 轴旋转的。如果我是机床制造商,那我怎么区别两种不同的联动呢?比如 求爱挂号一代表 b 和 a 联动,求爱挂号二表示 b 和 c 联动。 这儿再举个例子,意大利著名的 ceb 法拉利机床,用摆头加转台来做叶片 啊。这儿这是摆头,这是转台。转台是 a。 摆头本来应该叫 b, 但是它称为 c。 疏通系统是西门子系统,当然是法拉利机床厂商对西门子进行了二次深度开发, 那二次定制开发主要的一个方面就是 true ride, 这里分为五种。第一种 就是对摆头 c 进行联动,也就是说你摆头不论摆到什么地方, cry e 都可以追踪刀尖, 但是不追踪工作台的旋转,工作台带着这个一片旋转到什么位置,坐标系不会随着弓箭旋转。二是同时追踪 摆头刀尖与弓箭。三四五是针对 b, a 型的, a 仍然是工作台旋转,带着弓箭旋转, b 是摇篮式的球,二三就是同时追踪, b 和 a, 求爱式是单独追踪共建的选择, 五是单独最终逼摇篮。为什么要这样区分呢?其实就是为了能实现安全进刀, 把 shred 这个功能细分了。那么前面我们有一个视频,专门讲到 b 摆头加 a 转 台阶上如何实现安全的水平素质下刀动用了 aerot 指令, 而如果用法拉利机床这个定制的西门子系统的话,不需要 aerot 这个三加二的定早的指令去参与, 用这么几个 choy 指令就可以了。比如我用 choy 一追踪摆头的刀尖, 但坐标系不随着弓箭旋转,那坐标系就保持在空间不动, x y 里面必然是水平的,这样的话水平素质加高就很容易了。不需要 aerot 这些指令来参与,但 劲刀完成换成 chouride 二就可以了。西门子系统非常复杂,而且二次开发定制化也相当的 厉害,也就是说可扩展性很好,从这儿我们就可见一般。
147海滨仲夏夜 37:04
37:04 07:24
07:24 01:23:06
01:23:06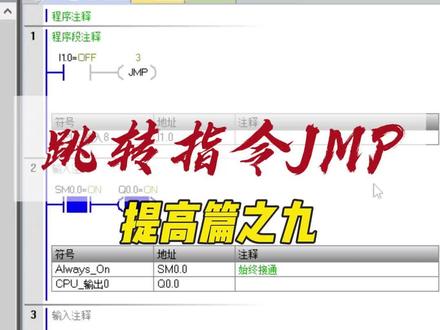 04:31查看AI文稿AI文稿
04:31查看AI文稿AI文稿今天讲一下跳转指令架谱,他的简称是 gmp, 这个指令他也是成对使用常规,我们上面 放一个 jap, 还有一个标号,这个标号可以是一,一直可以从一到二五五,也就说我们一共可以使用 两百五十五个跳转指令在一个程序里面,但是通常我们不是这么多,两三个就绰绰有余了。和他对应的标签是叫 level l i b l, 简称为 l b l label 是一个方框 l b l, 然后它 他用一,他也用一。如果下面再有一个驾宝,这样一个跳转指令,假如他边按,他跳到哪去了,他跳到这边来,假设这个程序中间我们再加一些其他指令,我们 另外写吧。一个常开的开关,编号为二,也一点零,这边一个恰,然后编号为一,中间有一个 s m 零点零, s m 零点零表示一接通就进行通电的意思,然后输出 q 零点零,接下来来个标签,编号为一,和它是成对,接下来再来一个输出 q 零点一。我们就 一个短历程吧,这样更明显,这个历程输入电脑以后会怎么样呢?接下来我们看实操,首先接个按钮,接在 r 一点零上,再分别接这两个指示灯, 我们可以共负极绿色,接入 q 零点零,上红色,我们接入 q 零点一,上,这边接它的负极公共端, 再接入一个正经,最左侧为第一组,输出到公共端可接正,也可以接负,也可以 接二百二十伏,我这一款呢是既定器型了。好,这样就接好了, 这是西门子的 p l c 编程软件。首先我们来一个逻辑开关,编号为 i 一点零,来一个跳转命令,这样我们设为三,接下来我们再来一个常开,可以设为 sm 零点零这个位置,再来一个输出,可以用 q 零点零, 我们这边填入一个跳转的 label, 也就是跳转的接触点,跳到哪里去,编号也是三,这两个 要成对使用都用同一样的数字。好,我们再来一个 sm 零点零,再来一个输出 q 零点一,这样程序就好了,我们下载到 plc 当中下载,下载成功 我们开始运行,我们监控整个成状态看一运行这两个常开的输出 就输出了两个,灯也亮了,这时候我们按下 i 一点零来看看什么情况,看直接跳过了第二行, 进入了第四行,这就是跳转指令,可以越过很多条,直接跳到你想运行的 那一行之前就可以了。跳转指令大家还有什么不清楚地方可以在评论区给我留言,需要西门子编程软件的请加我粉丝群,粉丝群里面 有发相关的编程软件,以及还有相关的纺织软件,今天的课程就到这里,谢谢大家。
183闽南电工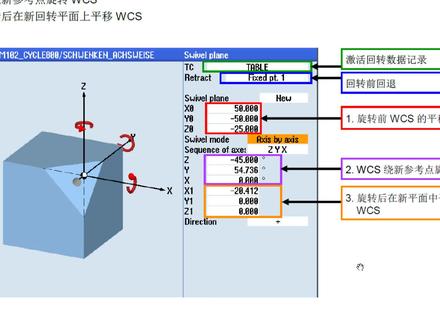 17:42查看AI文稿AI文稿
17:42查看AI文稿AI文稿西门子系统定早指定是 sack 八百,这是机床上打开 sack 八百命令的界面,看上去并不复杂,但实际上写着命令的话比较复杂。完整的 sack 八百命令有十六个参数, 下面我们讲一下各个参数。第一个参数定义,撒个八百指定运行后要不要退刀? 零是不退岛。一是沿着机床 z 着退到 z 向零点,二代表 z 向退到零点以后, x y 方向都要退到 g 中原点。三保留。四是 凿向退刀,沿着刀具凿向进行退刀,一直退到不能再退为止。五是定义一个刀具凿向退刀的距离, 这个距离达到的时候就停止退刀,那距离在哪呢?在下面。但是绝大多数情况下,这第一个插座我们都一定以为零不需要退刀。 第二个参数是双引号括起来的一个英文名称, 这个叫回转数据组,这个名称指定了三块八百的一系列的参数。 不同品牌的机床,这个数组名称不太一样,比如德玛吉机床 d m u 五零 b c 摇篮,这个名称叫 d m 机, 然后摇篮机床 a c 摇篮,机床名称是 t c 八 摆头转台机床 t c e。 所以第二个插座需要看机床说明书。 第二,它的如果你写零,也就相当于取消赛格八吧。打一般我们不用这个,我们一般取消定轴,用赛格八百两个双括号 就行了。刚才说的这个 t c 参数就是这个地方,这个系统,这个机床,它叫 table。 第三个参数定义,转化状态,所以转化状态总共有十万位,万位、千位,百位,十位,个位, 个位。如果是零,就是新的定轴平面, 如果是一是附加,就前面有 cigarbob, 我在 cigbo 前面那个 cigbobi 建立的那个定轴平面上再附附加,再来一次旋转。 如果是零的话,就是从初始坐标期旋转一的话,收前一个,十二个八百附加旋转, 你可以理解为绝对与正量十位。如果你定义的零意味着 cygar 八百,在旋转旋转轴的时候, 刀尖不跟随刀具不动,比如是 a c 摇篮, a c 摇篮在摆的时候刀不动, 这二射一的话,刀会跟随这个弓箭跑。 cygberbaby 这个指令下面就可以看到它既能旋转坐标系,也能旋转机床的。 没转着。为了安全,我们这儿第十位应该选零,选零就相当于海德汉 plan 指令里面用 today, 如果这儿选一,相当于 海德汉 plan 指令里面选 move。 百位一般选零就可以了, 千位没有用,万位,万位就是定义。 要不要让塞个八百去回转旋转轴?如果零那就是是,如果不是零,那就否, 否的话还有方向。那十万位呢?是旋转回转着是正向还是负向?这个正向和负向就是我们说的五朝机床多紧, 在多解的时候选哪个解?注意啊,这是第四找的解, 不是第五轴的。前面说了双摆头起床。 c 轴,它是第五轴, b 轴或 a 轴是第四轴, c 着也有两个结,在 b 区正或区负的时候, c 各有两个结, 这儿它不是选择 c 的解的,是选择双百头 a 或 b 这第四轴的正负解的,所以在双百头上这儿尤其复杂,所以在双百头记装上 最好不要让萨克八百来旋转 a c 或 b c 这两个旋转轴, 第四个参数就是选择坐标器旋转采用什么角度。 这第四个三度是用八位二进之数来表达的,复杂就在这最高的两位决定了回转角的种类。四个种类, 第一个是眼轴角,这儿翻译的不好,第二个是立体空间角,第三个投影角,第四个直接角,我们主要看第一个眼轴角。眼轴角英语怎么说? access by access。 凿,沿着凿去旋转,其实就是广义欧拉角。广义欧拉角的定义就是旋转的时候是沿着自己的坐标器自己转, 但是广义欧拉脚总共十二种,具体分为六种,狭有拉脚与六种泰特布莱恩脚。这儿是不是十二种呢?这儿我们看说明啊, 执行 cycle 八百时,不可以按照 z、 x、 z 的顺序旋转,这地方的意思就是说, 撒一个八百的这个眼轴角不能用狭义欧拉角,只能用六种泰特布莱恩角就是这六种。 上面这个叫侠义欧拉角,那侠义欧拉角跟泰斗布莱恩角都属于广义欧拉角,换句话说就是轴沿着轴去旋转, 只不过狭有那角,第一个凿跟第三个凿名称相同,泰透不来鸟, 三个轴名称各不相同,所以 cycle 八百不支持下右了就。那我们看看假如 x、 y、 z 顺序的态度不能有,这儿 总共八位二进支出写出来应该是什么样子的?最高的两位应该是零和零, 先写好,然后第六位怎么写?应该这样写, a 绕 x 的第一次旋转, b 绕 y 轴,第二次旋转 c 绕 z 轴,第三次旋转就是 x、 y、 z, 我们把这个写进去, 最后八位 二进制就是这样,这个换成十进制是多少呢?很容易无期。 在 sacrababi 写指令的时候,这第四个插座要写实禁制数,不是写二禁制数,要把它化成实禁数。如果 x、 y、 z 顺序的话,是五十七号。再举个例子, z、 y、 x 顺序, 以此类推,以 a, r, z 第一次旋转, b 绕 y 第二次旋转, c, r, x 第三次旋转,把这个填进去, 这就是 z、 y、 x 顺序。旋转的二进制八位数算成十进制是 二十七。在机床界面里面,这儿直接就写 z, y、 x, 没有写二十七啊,这个就比较直观了,其余的顺序以此类推,不再追溯了。 其他三种角度我们就不讲了,用的很少。第五、六、七号参数代表 定凿模式,先要平移,然后旋转,就是平移到什么点, 就是这儿的 x 零 y 零 z 零八九十号参数就是旋转角。比如二十七号 z, y, x 顺序,那这个 八九十一次,就是 z 角, y 的角, x 角 按照这个顺序写。如果这儿是 x、 y、 z 呢?这个儿界面就会变成 x、 y、 z, 按照这个顺序去写命令。 十一、十二十三号参数,意思是平移,旋转以后你还可以再平移, 就是这儿的 x、 e、 y, z。 这个一般我们很少用,一般平移就一次,平移完了,没有必要再第二次平移。所以一般我们这儿就写三个零十四号参数,就是如果把三个八百拿来,同时选 旋转回转轴,按照正解去旋转,还是按照负解去旋转?这个正解和负解再说一遍,是第四轴的正负解, 这如果写零,就不旋转,会打着 sat 八百只旋转坐标系。 如果是负一负减正一正减十五号参数,这个翻译的非常不好,很难让人理解这是什么意思。这个十五号参数对应的就是第一号参数, 第一号插头,如果你选 note, 就是三个八百,执行的时候先刀具沿刀轴方 方向退刀,退一个距离,然后停止,再执行塞个八百的旋转坐标系等一系列动作。啊,这个你倒着适量方向的退刀到底退多少距离?最后第十五号参数指令, 比如你写个一百,那就沿着向退一百毫米的距离。如果第一号参数你选的是零,不退到这儿没有用。第十五号参数没有用,随便你写,但是我一般我们就写零, 十六号参数一般我们就写零就可以了。以上我们就简单的介绍一下,下面举两个例子,比如这个指令, 第一个零不推倒 tz 八不说了,这是他的这个机场定义的速度拼差,这第三个差速十万,十万代表要按照负方向去旋转回转轴负减。 为什么倒数第三个战斗这儿有负一,这儿是对应的。假如是 a c 摇篮,那就把 a c 轴转起来, a 是负的角度旋转。 假如这儿写的一十万零一, 代表从前一个赛格八百的定轴坐标 c, 再进行附加选择。 如果写,您不管前面有没有十个八百,都不关我的事。我现在重新做一个平面啊,重新做的这个平面,这个新的定轴坐标系是从初始坐标系旋转, 不再追随前面的赛过八百了。所以说零是绝对一,是正量附加,但一般我们叠加附加非常少,非常少见。 二十七号 z y x 顺序的延兆角,然后二十三十四十表示旋转之前坐标系先从初始坐标系先平移 一到二十三十四十这个点,然后按照 z y x 顺序旋转。旋转是按照欧拉角六十度,九十度,四十度旋转, 旋转完了以后要不要再平? elevel 零零零三个零, 然后倒入第三个参数,指明旋转回转轴是正解还是负解?我先按照负解来转,第四轴的负解来转, 后面两个零我就不再追数了。如果这样写,第三个长度是十十一吗?啊,这个这个地方如果写一就代表不转不转了,我们看看是什么样子的, 也就是 one way, 写个一否负像的,那就不转了。同时倒数第三个参数也写零,不转,只转坐标系。 如果这样的话,塞个八百直转坐标器,那 a c 轴需要你单独写个命令,把 a c 轴转起来,具体要转到多少度,你必须要让有一个明确的数值把它转。 大部分情况下我们都是让撒个八百去同时转坐标器与回转轴,在个别的情况下,如果解的情况比较复杂的话,必须 然后做处理,决定回转早怎么转。三个八百直转坐标系,尤其在双百头机床上。 这就是简单的介绍一下。光看官方的说明书看不懂,翻译的很差, 翻译者根本也不理解,他不是专业的技术人员,就是简单的翻译一下啊,这种翻译出来的说明书根本没有办法看懂。 比如这儿倒出第三个参数负一的意思,其实是 第四招,按照负解旋转。正义是第四招,按照正解去旋转 零就是 saguary, 不负责旋转,会转轴,只转坐标器。这儿写的驴唇不对马嘴,看了根本不懂。
679海滨仲夏夜




