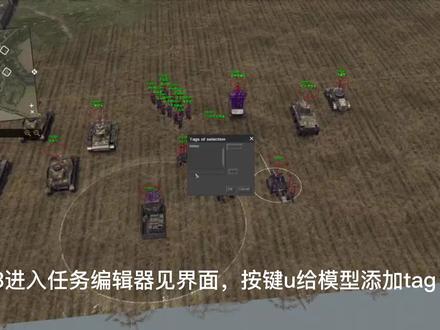
dcs任务编辑器怎么设置编队距离
这是学习空战前必学的第二课,而中 prf 是对于中低接近率目标最佳的方法。 高 p 二 f 有最长的探测距离,但这在你和目标头对头飞行的时候效果最好。除了高和中 p 二 f, 你还可以选择交替模式来切换高和中 p 二 f。 交替模式是对于目标方位角和航向夹角位置时的最佳选择。你可以按右视加 i 来切换 prf 设定。我给你增加了两架飞机,一架飞向你,一架飞离你 练习调节你的 prf。 注意,不同的 prf 设定会探测到不同的目标。当你准备好后,按空格键继续。 在绝大多数现实任务中,目标不会恰好出现在与你相同的高度层,这时你就需要使用雷达天线的扶阳角控制功能来搜索与你不同的高度层的目标。使用右线加分号使天线向上。 右式加句号使天线向下。垂直显示器右侧垂直线代表雷达天线角度的运动范围。 垂直线中间的两道短横线表示天线中之时的位置,在此垂直线右侧有一条标有数字的短竖线,只是当前天线的抚养角。 我已经分别在较高和较低的高度层设置了两架和你对头飞行的飞机。请调整天线抚养脚来探测这两架飞机。 当你探测到两架飞机后,按空格键继续。在 hud 底部。两条垂直线的中央是一条只是雷达天线水平角度的水平线。它只有三种可能性的设置, 中央、右侧和左侧。按左线加动号让天线向左转动。

粉丝2.2万获赞29.6万
相关视频
 10:08查看AI文稿AI文稿
10:08查看AI文稿AI文稿然后就给后续的一个车 现在添加,把他们添加到支援 you man that with the scotty felix。 这样的话我的一个时间非常好了。 然后我们把空调制干,冰压到 呀, 太多了。
42遥远的星星 13:53查看AI文稿AI文稿
13:53查看AI文稿AI文稿yeah do come on doc come in here what is that back touch now yeah document here do come andy that nobody's coming here stupid gaza。 干啥呀, 你也不累。 嗯,可以弄,弄完可以发,发完就接着, 不让骂。我饿吗?你饿了?我说你呢,我饿。嗯,这啥,我饿, 裤子都穿不上了,不能吃了啊。 one gives not much need to。 他不是很饿,你一天到晚他不饿,他就是闹。过来 过来过来过来过来过来过来。 就是不饿呀, 叫什么 都不是我下的啊, 让你找吃的。 go go go。 嗯, 哎呀,感觉够呛了啊刚刚要不下个吧。感觉还行。 我们西安人在此,拜拜。
54遥远的星星 09:47
09:47 03:19查看AI文稿AI文稿
03:19查看AI文稿AI文稿很多玩家都不会玩导弹阵地,摆设好各种配置后,结果发现他们都不运转,原来是你没有放对。正确方法就是在任务编辑器里打开坦克,然后在右侧选择阵营与坦克类型,根据自己需求去选择吧, 选择好类别再选择类型,比如防空导弹、战车等。在选择时要选择同类型的,不然无法成功发射导弹,比如这个 scn ps, 最好就是选择发射车,不然后面都要一一更改。 在地图上放置后,在单位最后一个按钮不断点击,这个做法就是为这一组添加成员数量,设置好数量后就将他们一一摆放好,可以首 手动摆放,也可以在高级航路点动作设置进行。 摆放好导弹阵地后,就点击某一个设备,然后更改为其他必要组件,比如发射车与探查雷达、追踪雷达等,具体看视频操作。
37皛志游戏 00:59查看AI文稿AI文稿
00:59查看AI文稿AI文稿我们的下一步是启动两台隐形,在这么做之前,确保你的推力感在最小位置。按右 out, 将 home 启动左发。 在这里我试着快捷启动发动机,但好像任务无法识别操作,只好关闭发动机,重新启动 左发。启动后按右 ctrl 加后启动右发。 在前方面板的中央是引擎转速表,表上有两个指针,当一台引擎被启动。
64夜雨康斯坦丁 16:42查看AI文稿AI文稿
16:42查看AI文稿AI文稿哈喽,大家好,我是黄瓜,今天给大家带来一期这个欧洲卡车模拟二存档编辑器的使用教程啊,首先让我们打开这个存档编辑器啊, 打开这个 tssetol 这个文件啊,打开这个 啊,我打开这个文件,现在进入的是这个界面。好,现在现在到了下一步就是让我们启动我们的游戏啊, 我们启动一个单机版啊,直接启动单机 好了,这个是皇后自己的存档啊,我们不用管他,我们直接新建一个存档, 然后选择一个头像,选择一个卡车,选择一个公司标志,再输入你的公司名称,咱们就随便写一个就行,然后简体中文这个地方有的刚上来的同学他是 英文的,所以点一下,然后倒数第三,倒数第,倒数第二个,倒数第三个去了倒数第二个就是简体中文,然后把此 tm 云端的这个 对勾拆点掉啊,然后点创建 好了,大家看到了,刚才选择成 的时候,黄瓜选择了卢森堡啊,细心的朋友刚才也看到了,为什么啊?咱们的任务现在是卢森堡到卢森堡,这就是黄瓜为什么选择去卢森堡的原因啊,因为他很快出门就到了 啊,出门就到了,咱们现在把任务过一下 音乐, 帮我把音乐调小一点。 好,现在呢,到这一步的时候,他就会提醒咱们让咱们去往目的地, 嗯,然后我们点击 e, 呃, esc, 点击推出的那个按键,然后点击存档和独导,然后点击保存,是保存游戏啊,点击一个 新春岛,然后春岛的名字呢?咱们就起一二三四五六吧,啊,因为 比较好记,对吧?这个存档咱们就建完了啊,咱们可以看一下在这个载入,下载这个里面有一个一二三四五六的这个存档。好,我们不要管他,我们切出我们的这个 存档编辑器,到这一步之后,我们点击 ok, 然后选择 ets 二的这个存档,然后选择找到咱们的这个啊, 这个刚才创建的这个名字啊,这是咱们刚才创建的这个文档,第一行不是中间的这个是我们的,就是游戏名最早做的那个公司名字,然后第二个呢是我们这个游戏的刚才你做的那个存档备份 啊,存档备份,这是这黄瓜之前的存档,所以是没有刚才的那个存档备份的 好。让我们选择这个村道,然后点击解密,然后点击加载村道啊,大家会发现这个进度条在 再走好,出来了,这就出来了,出来以后我们第一件事是干嘛啊?点击这个最大,给他调到一百五十级,然后把这个危险品呢,危险品呢全部点满, 这是第一步,第一步完事了之后,我们选择公司啊,点击解锁所有访问城市,然后再解锁所有车库,点击升级 到这一步,如果你想自己开车挣钱的话,那基本上到这一步就完事了,如果你想再刷点钱的话,那么简单,在这个位置啊,再输入九块九, 为什么输入九个九呢?因为他会检测的啊,好,到这 这里就完事了,这个位置可以这个卡车的,这里啊,可以修车和加油啊,都是免费的 啊。挂车,这也是给挂车修理,但是这是只是给你自己的挂车修理啊, 这是公司名称,是做货的时候用的,做什么货啊?嗯,当你打个比方,你现在咱们在这个卢森堡,你想送货去博明汉, 那这就选完了,选完了之后呢,可以在这里选择。你要配送到货物啊,什么货物都有,所有的货物都有,但是有的货 你得需要,你有 dlc 啊,得有 dlc。 做完货之后点击添加啊,皇后,现在做一个。 嗯,来坐个火车头吧。火车头在哪 啊?这是咱们的等级不够,火车头还没有刷出来啊。等级不够,火车头还没有刷出来,我们随便来一个刹车片吧。 啊,这块基本上都可以不用管。然后直接点击这个啊,点击添加 任务,添加到任务列表,这个就做好了,这就是货总总里程呢是两千零八十公里啊,卢森堡到博明汉是两千零八十公里啊,然后我们点击保存 好,这保存结束我们给他擦掉或者是隐藏都可以。现在回到游戏里,我们点击加载游戏。一定要点点击加载游戏啊。 好,细心的朋友们可能会看到我们的右下角这个资金啊,资金已经改了。好,这个就是我们的所有的这个东西已经改完了,而且我们的等级啊,现在还看不到等级。 好让我们现在去车站啊,我们直接飞过去吧。 嗯,车库,车库怎样?卡车销售商在这里 啊。这个飞行模式呢,就是按小键,不是大键盘上面那个零,然后四四六八控制前后前后左右。就是小键盘的那个二四六八控制前后左右, 然后按九落地,落地的时候稍微离地面有一个距离,不然他会卡到你的车啊,到这一步我们直接啊买车。 好,第一辆车,第二辆车, 第三辆车, 哎,怎么了 啊? 啊?第四辆车, 第五辆车,第六辆车,哎,我们一共买五辆车就可以啊,一共买五辆车就可以。好了,现在我们这个车买完了。 有的小伙伴啊,有的同学他刚上来的时候,他就会带飞行模式 啊,刚上来的时候他就会带着飞行模式,如果你没有飞行模式,那下期视频呢?皇冠会出这个飞行模式的修改教程啊。 这是在货站,我们按零,然后飞到这个你送货的这个货站啊,这是,哎, 然后啊,对,按错了,是 f 九落地,哎, f 九落地,我按九去了,因为黄瓜也很少用这个这个飞行模式啊。好,到了卸货区 我们直接跳过,因为我们现在有钱有经验,我们直接跳过 啊,这是展示我们的总部啊,过了第一个任务之后,他就会给你一个总部。 好了。这个同学们刚才想问,肯定会有人想问,为什么会要买,要买这个五辆车啊?因为这块有一个车库管理,这里有一个车库管理啊, 如果你们有五辆车的话,这个车玻璃是不会亮起来的,就是说你想飞车库是飞不了的。什么叫飞车库呢?咱打个比方啊, 你的朋友在博明汉,而你在克拉根佛,你两个想,你们两个想在一起玩,对吧?那你就可以直接飞车库啊,就点博明汉,点前往 啊,就直接就过来了啊,这就直接过来了,如果你没有,如果你没有五辆车的话,那你是直接飞不了车库的,你就只能自己开过来,就像为什么嘎存档要用存档编辑器把这个地图全都打开啊, 好 好进到游戏了之后,我们开始游戏之前啊,有几个地方给大家 讲解一下啊。这个游戏设置里面这个有一个疲劳驾驶,这个如果你不想开开车,开开,开着车的话,想休息的话,你就给他点关掉,然后里程偏好尽可能不要管他,你可以给他拉到最大, 他就会会给你选择最远的那个里程啊,道路交通事件和绕行啊,这些都可以不用管。降水怪,降水盖里,如果你有那个,嗯,怎么说呢,就是如果你有这个,呃, 冬天的服务器,冬天的皮肤就是冬天的 dlc, 哎呀,什么叫冬天 dlc, 这党做的稀碎呀,就是你有冬天的这个 model 啊,你可以用这个, 这好吵啊啊。就是如果你有冬天的 dlc 的话,不是冬天的那个 model 的话,你可以把它拉到最大,可以看雪景啊,它会给你下雪或下雨啊,显示过场动画,这是你开始的时候 那个欧卡的那个动画,显示时区啊,这个即可能的打开,然后档位,如果你是 就是喜欢真实自动挡的,你就调真实自动挡,这个序列式是手动挡, h 档缓过,目前还没有用过啊。然后制动强度给他拉到最大, 然后卡车限速拔了往下,这里有一个真实油耗啊, 如果你喜欢这种,就是啊,开开车没有油了,很快咱就给它打开,基本上这个游戏设置里就这些, 然后这里是按键设置,按键设置基本上可以不用改,玩的时候大概自己看一下就可以了,然后控制啊, 控制设置往下滑,这里也都基本上没有什么。黄瓜的灵敏度是最高啊,用的是键盘啊,对了,还有一个 音频打开,打开音频之后往下拉,拉到拉到底,然后倒数第二个语音导航里面启用语音导航,选择语音和语言这块, 拉到最后有一个中文游函啊,这是个女生,你可以用男生啊,可以用男生,然后警告这个地方你可以选择无或者是音效 语音,但个人建议不要打,不要给他打开,因为他会一直提示你啊。呃,你已超速,请注意您的时速 啊。对,刚才咱们把音乐关了,所以预览是听不到的。好了,基本上进入游戏的设置就这些啊。基本上进入游戏的设置就是这些 啊。好了,本期视频到此结束,感谢大家的观看!关注黄瓜不迷路,黄瓜带你上高速,我们下期再见!
157游戏玩家黄瓜 15:31
15:31 05:40查看AI文稿AI文稿
05:40查看AI文稿AI文稿这不是三 d 游戏,而是大量四空二全新航线变电器,无需现场作业,在电脑上就能精细规划航线。准备好鼠标键盘,马上教会到家。打开四空二,进入项目,点击航线库, 创建信号线,编辑任务名称,选择机型, 选择行点航线确定调整浏览器至合适比例,开启航线,规划新世界。 选择起飞点安全起飞高度务必高于起飞点附近最高障碍物二十米。新手选择垂直起飞模式,如果你是老司机,提前安排好起飞路线,选择倾斜起飞模式,效率更高。 务必确认 ik 信号正常,其他参数默认设置关闭航线,设置波浪线符号,切换视角 一二,切换主幅镜头,鼠标滚轮控制变焦, w a、 s、 d 控制飞行器前后左右移动, q e 控制左右偏航旋转 c z 上升下降空格还不能跳空格,新增行点,操作很简单,不易 结束了,大家截图保存 了解基本操作后,拨浪号键调整至与我相同的界面布局 无人机视角二 d 小地图拍照样图三视图界面下,按 v 鼠标控制无人机视角,键盘控制无人机移动拍摄悬停鼠标微调拍摄点, nf 定向拍照, 打单个或多个拍摄点。哎呀,拍摄点不小心打歪了, 呃,别担心,按 v 解锁鼠标微调白框,重复以上操作,边飞边打点小地 确认环境,很快就完成了场地的巡逻。航线, 航线完成后,旋转模型检查航线任务中是否存在绿色虚线,绿色虚线代表航线穿模,可能是碰撞点。我们可以更改航点位置, 双击需要更改的行点,进入编辑模式,键盘移动行点位置空格确认修改, 或者鼠标左键水平拖动行点,左键加 alt 键上下拖动行点改至安全位置,再双击拍照动作,更改拍照点。 也可新增过渡点,规避风险。点击碰撞行 断初始航点,进入虚拟飞行视角,按 shift 加空格,添加一个过渡点,避开障碍物。多次确认航线安全后, 保存航线识别验证,通过计划库调用并下发航线任务立即执行。 观察无人机导航信讯模块与图传画面,若有危险情况则急停暂停任务,重新编辑航线,规避风险。 验证完航线,我们通过点击精准复拍,调出蓝色预选框,微调拍摄精准度。小键盘 上下选择移动行点,左右移动行点动作,浏览任务照片,逐章调整。 比如厂区巡逻航线中,我们需要精准确定消防栓位置,无遮挡,随时可应急使用和厂区内配电线,配电柜无损坏。 划重点栏框,通过机器学习框选目标物,与实际目标飞行物进行特征点匹配,达到精准拍摄的目的。 而白框将直接调整云台相机俯仰及偏航角,随后保存下方航线任务。如果你仍喜欢 经典的航线编辑模式,可在地图或模型中右键打点编辑航线, 别克首飞,上传在线任务,录制航线至时空二,继续编辑精准自拍界面。 你还记得 f 键是什么功能吗?嗯,最后一次划重点,登录大江四空二航线编辑器,点击帮助按钮查看操作说明, 忘了也没有关系,你要的答案都在这里,感谢观看!今天你会飞了吗?
194三维测绘 28:53查看AI文稿AI文稿
28:53查看AI文稿AI文稿panza einsel spirite last time get to it alice clark pathela yeah fun gates lose you don't need a feeler bangates angly george the feeler 还想吃海 answer doesn't answer to the right 小辉 van gates and entry clothes i'm sarah aims up spit heights unfamilitation either spit right 为了照片 yeah yeah! boy gets lost one gets lost quickly hours now on the night come on! bastardian tune come on it's lost our standard one thing and i alice climbing up you know yeah! 安全安全带, 然后就把那个。
64遥远的星星 27:44
27:44 34:22查看AI文稿AI文稿
34:22查看AI文稿AI文稿我们再去学习了关于 work process 的一个一些任务指令的一个接触之后,包括产生,输出,接收, 搬运和拾取的这样的一个指令。那么在完成这些学习之后呢,我们来去进入我们的一个知识代入的一个模块,那么在这个模块里边是 基于我们每一个章节中所学到的一个内容。然后呢针对一个大型的布局,然后逐一的进行一个设置的加入。那么在这里边我们首先需要导入的一个关键所在 就是我们在之前三单元老师这边带领大家做制作的一个工作站布局,那么我们再去导入这个 工作站布局之后,我们再去在这个工作站布局的基础上进行一个布局的搭建。所以说在三单元的教学视频中,老师逐一强调的说关于这个布局大家一定要保存。 那么回到我们的所讲,在这里边除了三端鱼的布局之外,剩余的组件这边的话呢,大家也应该很熟悉了,人 work process log 管理器,传送带,托板, 然后零件框。零件框的话大家没有接触到,然后原著除了零件框之外,其他的大家都是已经或多或少已经接触到了。所以说这里边的话呢, 老师就在导入的时候会把这个速度提到快一些。 首先我们打到 works 文件夹,在 works 文件夹里边我们将 work process 服务器进行一个导入,导入之后还有我们的人工, 再有的就是传送带, 传送带之后我们接下来就是一个拖板,零件框还有圆柱。 那么拖板的话呢,我们直接在 product 这个文件夹里边去查找, 零件框的话,其实在拖板上方我们就可以直接找到这个零件框, 白色的以及圆柱,圆柱也在这个文件夹下,我们找到这个黄色的 single 圆柱。那基本现在我们做布局里边所需要用到的组件已经完整了。那完成之后呢,我们在这个布局里边, 首先需要把这个物料机直接去掉,因为这个物料机是在我们之前三单元在制作的时候所插入的一个小型的辅助工具。其其实我们在 后续的一个搭建中,物料机是要被省去掉的,我们先给他删掉。删掉之后我们首先进行一个布局的一个摆放。那这边的话呢,首先我们再把 所需要禁止的组件,不需要运参与运作的组件呢,放置到一边,我们先进行一个布局摆放。摆放的话呢,我们为了保险起见,我们先把这个索要进行一个连接的,这个传送带呢,把它的跟随改变的复选框给它取消掉, 然后我们直接复制这个 oppo size 主页进行连接。那注意连接的话,如果你在视图很小的话,连接上之后一定要去剪 检查,有可能你连接的是他的底部的一个接口部分,并不是什么呢,并不是他侧边的这个接口部分。大家一定要去注意这一个小题的细节。 然后再将一个传送带呢,我们给它复制成两条,并且更改一下角度位置。 那么这边的话呢,老师先大致的调整一下位置。注意的是我们在调整完位置之后,是要给某些位置那个执行单位啊,或者说是我们在 一些放料的一些零件位置是需要留一些空隙空间的,所以老师这边呢先进行一个暂时的一个调整。 那么在这里边主要做到的就是我们先在原先的这个传送带的基础上加入两个 oppo size, 并且呢再在它的一个左侧位置呢加入两条传送带, 他们的起始和中指位置都加入 process。 完成之后我们可以看到除了这个之外呢,他的一个脚步的一个位置, 或者说是中间的一个夹夹层,那个位置是有两个拖板,并且上面是有 work process 的。大家可以发现的是上面是一个 w 的一个形状,这个 w 形状的话也是 work pro。 再次只不过是针对性的进行了一个显示的一个设置,那么一会会给大家讲到这个显示设置是具体要去怎么去做的。所以呢,我们在接下来将两个拨板然后放入,但是像现在老师再去放入的时候,明显感觉到很拥挤, 很明显和我们在截图中的它的这样一个宽松位置是不一样的,所以说我们还需要调整一下它们之间的一个距离。 那么针对他的一个距离调整的话呢,我们可以通过多选,或者说我们也可以把他们建立一个组,都是可以的,可以根据大家的一个调整来进行一个设置。 然后大致调整之后呢,我们在俯视图的时候也要给它相应的对齐, 然后这个时候的话关于他的一个放置位置就不会像之前那么拥挤了。然后我们再大致的去进行一个位置调整,因为这两个位置的话呢,他不是很不是很那个 重要的一个摆放位置,只需要他在这个中间,不要去影响到我们的人的一个路径就就可以了。 那么这样子就可以了,我们最后呢再把人放置到我们的中间区域就足够了。那现在呢,单从组件摆放上来说,我们就已经完成了这一节中所需要用到的组件的一个放置。那么完成之后, 这里首先给大家要需要注意的是什么呢?我们先首先去说一下接下来所需要做的一个加工流程。 完成组件摆放之后呢,这一单元我们会给他加入一个人工的一个模块,人工上料上下料的一个模块。那针对这个模块的话,首先零件的一个输入, 产生输出和接收。那这一块的话是和之前我们所讲到的内容是一样的,由人针对接收的零件搬运,放到一个拖板上面。注意的是在放到这个拖板上面之后,我们要给他设置的是什么呢? 放置之后呢,我们要给他设置是正列式的一个放置。然后这个放置呢,零件是要在箩筐里边的,也就是我们的这个零件框里边的。 然后呢,另外一边我们要给他放置一堆没有零件框的一堆零件,也就是意味着是可以直接拿出来放到传送带上进行加工的。 直接从另外一堆的这个零件中搬运加工输出,进入到这个成品布局, 也就是我们之前做完成的这个上下料单元中,然后进行过一系列加工,完成之后成品。然后呢,我们再由人工把成品放置到我们的输出传送带上,进行一个输出,这是我们最终的一个目的,所以说我们接下来呢会把 布局中进行一个模块的一个划分。首先我们将要去做的是零件输入的一个模块,那么针对零件输入的一个模块的话, 我们这样给他做到的是老师现在框选的这个扑克,也就是首先要完成零件的一个产生,然后输出在 就是接收,那么再将接收的零件由人工搬运到头板上,并且呢是进行一个阵列的一个放置。所以呢我们再去完成这一步的话呢,也是需要一个不同的一个指令的一个配合。 我们首先从初时段开始进行一个设置,产生零件的话,我们首先要有一个零件框和一个零件作为一个基础, 我们把它先单独拉到一边作为一个基础的话,如果这个时候老师这边直接通过捕捉,然后把零件放进来,那但是这只有一个零件,很明显是不符合说我们一个用零件框来去进行一个 呃装取的一个条件,那么用零件框装取的话,它最起码会有很多个零件,然后呢再从一个框里面进行一个零件的一个存放, 那么完成之后呢才会对他进行一个搬运。所以说我们在去做零件的产生之前,首先需要去做的是一件事情,就是我们先要把这个零件框填满。怎么去填满呢?其中有两种情况, 第一种是利用我们之前所学到过的阵列的一个方式,然后对它进行一个参数设置。 然后第二种方式的话呢,是利用我们最初时学过的复制粘贴的方式,再加上父子关系,然后进行实现。那我们这边的话呢,首先先利用一个父子关系来去给他进行实现这样一个功能。那么在这里呢,我们首先 要去通过复制粘贴的一个方式做出三十六个圆柱,那么大家听到这个三十六个圆柱之后,大家觉得可能说这个数量有点庞,那么如果这样复制粘贴下来的话,每一个还要去找位置 会得不偿失,或者是说这个时间上会很多,我们卧不如去直接去做我们之前学过的阵列的一个方式。但是如果我们掌握到一定的一个技巧的话,它的一个复制和粘贴来说会相应的很简单一些。那我们来看, 那么这填满这个零件框的话是需要三十六个。那针对这三十六个的话,我们直接从第一个开始做起,老师这边打开俯视图,然后呢摆放了第一个之后,直接复制粘贴第二个,然后再复制粘贴第三个, 也就是一列里边的话呢,顶多放置三个。然后这个方式的话呢,大家可以通过这个目测的这个方式就可以了,目测的方式,然后给它放置较为平整就可以了。然后第二列的话是不是还有一个一个摆呢? 提示不用了,我们直接摁住 ctrl, 选择之前摆好的这三个直接复制,那么第二列就有了。那么按照这种方式的话,其实我们再去进行多选, 然后第三列和第四列也有了。那以这种方式进行一个摆放的话呢,那相信我们再去 放置的时候,就从参数上面来写的话,因为我们要去阵列的话,首先要去计算他们之间的参数,然后放置什么的之类的参数上面来写的话,基本时间上也是差不多可以平齐的。那可以看到老师又通过一个复制, 将一层的零件直接复制出来,那么这个时候老师只需要针对圆心所在的这个零件,对应他上方的进行一个捕捉,进行一个放置,那么第二层就可以了。然后呢,再通过复制粘贴, ctrc, ctrlv, 然后又出现一层,直接再进行一个捕捉, 那么第三层就可以了。那现在的话呢,针对我一个箩筐里边所有的这个零件的一个阵列和缝制,我就通过手动的一个复制粘贴就已经完成了。那么这个时候大家可以发现的是,他并没有想象那么难, 三十六个,并没有想象那么难,哪怕是一百个。其实我们只是开始的第一个起步比较难,那么到后面如果零点个数多了之后,我们直接多选,然后再去进行复制的话,会事半功倍的。那么完成 之后,这个时候注意的是,如果老师先拖拽一下这个楼框,发现的是什么呢?框出去了,但是零件还在位置,那这代表的是说他们并不是一体。那如果说我到时要去产生的话, 如果我现在就要去设置一个产生,设置的话,这里显得可以的。但是我写的零件是什么呢?我不可能每一个零件都要去写进去,然后逗号逗号隔开,那样生成之后他输出的效果也是单个单个的去出, 不是我所需要的一个效果。所以说我首先需要给大家做的就是先让他们成为一个体, 就是说他首先需要这些零件和这个框是一个整体。那怎么做呢?我们直接把所有的零件追加一个父子关系,也就是附加。然后附加到哪里呢?附加到楼框上面就可以了。 那这种情况我怎么做呢?毕竟现在已经复制出这么多原著了。大家打到单元组间里边, 我们打到单元组件类别,就单从零件这里边呢,我们直接从这个 singer 这里边的分类,然后选择第一个,按住 shift, 这个时候按住 shift, 选择最后一个 singer, 然后注意这个时候就不要忘了他。再检查一下下面有没有 cd, 如果有,你再按住 ctrl 多选就可以了 啊。这样就都选都选了之后,直接点击一下附加,然后所有零件跟随一下这个箩筐,点击 好。那这个时候所有的圆柱都以楼框为主,那这个时候我拖动框的话,那这个时候发现所有的圆柱都会跟对我的框进行一个拖动, 也就是说所有的零件都是他的子项零件。那这个时候我再去进行一个产生的话,我直接告诉他我产生一个框就可以了,因为他的子项零件会跟随他的主项去行走,然后产生框, 然后提交。提交之后呢,我们再做一个什么呢?输出,但在这之前我们先验证一下走。 这个时候如果出现这个黑色叹号,大家不用担心,之前也给大家解释过,这属于正常现象,我们在做完。一般做完任务之后是不都会消失掉的,那这个时候大家可以看到产生出来的零件是正常的。那完成之后呢,我们继续往下就可以了, 按照之前学过的方式就是产生。然后呢,怎么呢?向外输出所用到的指令就是 transport out。 那去做的时候大家一定要注意的是 什么呢?一定要是在 create 后面朝前点击 transport alt, 然后提交,直接勾选所有就可以了。提交。那另外一边的话就是 transport 的 in。 那这个时候我们再模拟,大家可以看到产生输出和接收就已经没有任何问题了。 那在这里边的话呢,给大家再去多做一个小的知识扩展。 大家可以看到现在虽然说我是增快了一个播放倍率,但如果我按一倍的去进行运算法,大家可以看,由于传送带他是比较短的,他的产生的和输出的这样的效率还是比较高, 基本上这个传送带上面是满的。那这种情况的话,有的时候他也不是一种好的一个现象。比如说我们可以看到 产生的时候多个零件的交融,那不是一个好的现象,包括我们后续这个加工的速度,或者说哪怕人工的一个摆放速度。可以看到这里边关于人工摆放就有四个窝口,再次再去等待它,再加上两个拖把的话是有六个, 那这个时候人会供不应求,所以说我们没必要把它搞的这个速度这么快。我们可以在怎么呢?我们重置,然后在已创建的这个产生和输出后面,产生和输出后面我只需要再加一个。这里学习一个新的指令,叫做体内 delay 的话是延时,延时的话呢,这里老师给他一个十五秒的 一个空隙,然后提交。那这个时候的话是有三条指令的。初始段首先产生一个零件,然后向外输出,然后等待十五秒,延时十五秒。 oppo 赛事特性就是走完之后自动循环,那么他在延时十五秒之后又重新开始产生输出,然后再等待十五,再重新开始产生了输出。也就意味的是每个零件的产生和输出中间所间隔的时间是十五秒钟。那这个时候我再进行一个播放, 那么大家可以看到它的一个产生和输出的一个效率就已经和之前又有不一样。那同样这个 delete 的话呢,也可以按照什么呢?按照我们之前物料机里边的那个输出频率进行一个设置。你看到三者组合之后呢,基本物料机已经被淘汰了,我们 完全 oppo 才是可以去替换掉的。那这边的话呢,就是关于单个零件的一个产生,输出和接收。那么输出接收之后呢,我们再去利用人工进行一个抓取和放置的一个码舵就可以了。 那这个时候的话我们先在末尾端接接收之后我们直接设置一个 fade fit。 那么零件的名称我们还是最好设置一下,不要尽量在抓取的时候不要去勾选这个所有,尽量不要勾选所有, 然后粘贴。然后任务名的话呢,这边为了后续的一个方便设置。那这边的话呢,我就以数字开头了,以 数字进行一个区分了。那这边的话就作为人的第一项任务就写一个序号。一,然后手爪和手爪坐标系,因为是调用的人工,我们不涉及到,所以说这两个完全没有必要去对它进行一个设置。 所以说呢,我们这两个就直接给他 pass 掉上去就可以了。之后搬运提交。 那么再有一个放置。那为什么这两个 work process 老师并没有再去先去进行一个导入呢?这里边为的就是给大家去展示一下他们的一个显示更改的一个效果。 老师再重新导入一个 oppo process, 同样通过捕捉捕捉的方式,我们来去把它放到中心,并且呢给它减去一个七百的高度回撤 就可以了。完成之后呢,那怎么像我们 ppt 里边它所显示的这种形状的一个更改呢?我们只需要选择这个 opposize, 在他的显示框里边可以看到默认的是一个箱体的一个显示,我们取消勾选,这个时候我们勾选这个 w 就可以了。但是这里边还会有其他的,有传送带显示的,还有那个工作台显示,甚至是这个 拖板显示的都有,我们显示一个 w 就可以了。显示显示之后呢,这样的话我们就有了 work process。 然后在这里边呢,我们对应的设置一个放置。 那这里边的放置的话呢,老师打算用一个 need customer 对它进行一个放置, 因为零件体较大,如果用 netpart 的话呢,它的一个放置,如果稍微有点数据的话,它会 沿着第一象限。那这边的第一象限是什么呢?当 workpose 以 w 为证,那他的第一象限就是现在老师鼠标就显示这个位置,那么他会一直往这个方向延伸,他不其他的这个拖把的位置他不会占用,支持占用这一角,并且会向外延伸, 那这种摆放方式的话呢,会导致关于波板上然后摆放不均匀,并且有悬空的零件的一个显示。所以说这边呢暂时就我们就先用这个 need customer, 然后直接提交,我们还是直接调用 party 一就可以了,一会儿针对 party 一进行一个修正提交。然后呢我们进入 这里边关于 customer 的一个设置。 customer 这一设置的话呢,首先名称我们要进行一个更改,名称我都要进行一个更改, 那么针对他的一个长宽的,一个长宽的或者是说是他的一个位置显示,我们要怎么去更改。那这个时候呢,首先我们要去对他进行一个测量,也就是说我们要去测量一个他的一个位置。 我们看一下这个箱体,首先测量它的长度,最外比沿 选择另一侧最外沿是六百。那么完成之后呢,我们再测一下另外的宽度,最外沿另一侧最外沿的话是四百, 也就是长是六百,宽是四百。那么高度是多少呢?我们再看是三百五。那这个时候数据就得到了一个是六百,一个是四百,一个是三百五。 那针对这个的话呢,我们就可以去对他进行一个坐标的一个填写了。那针对这个坐标的填写的话呢,老师打算是要这么去进行一个放置。 这里老师还是以这种画图的方式给大家进行一个标律。首先呢这里会给大家画一个坐标系过来, 我们换一个方向。 那么这里边的话呢,老师画一个坐标系, 那老师打算要放置的一个方式是什么呢?我们我们打算放置,因为考虑到这个拖板的一个大小,我们放置的方式是第一个,然后第二个, 然后第三个,也就是说我们横向放置三个,纵向的话就一个。那么针对这样的一个放置的话呢,我们就只需要考虑到他的一边横向的这样的一个坐标就可以了,还有他的一个高度坐标,所以说我们再去放置的时候,我们直接 长宽高也知道了,然后它的一个方向我们也知道,那这个时候我们只需要写 坐标就可以了。首先叉 x 的一个偏离的话呢,那我们先因为它的一个长度是六百, 长度是六百的话,那我们就要去把它进行一个划分,但是在去做之前一定要再检查一次。像老师刚刚在做的时候,计划是横向是有三个,我们可以直接拖过来,我们看能不能放下三个, 哎,这个时候大家来看一下老师准备放置的是什么呢?三个,但是放置三个的话呢,以他现在以他现在所放置的这个长度这种方式 进行一个放置的话呢,它横向只能放置两个,但是如果我转一个角度的话, 才能放置三个。所以说我们在去放置的时候一定要搞清楚,就是他是否要进行一个转角,如果你不进行转角的话,你就要去根据你所 写那个测量处的一个长度和对应放置的一个位置进行一个匹配,那么匹配出的结果如果是像类似于现在所展示这种, 不能放下三个,只能放下两个,如果非要放下三个的话,只能是旋转一个角度,那么旋转角度的话,我们也之前也给大家讲过,是在什么呢?是在这里边我们直接写一个角度的一个偏移就可以了。所以说针对这一块的话呢,我们就需要给 给他重新的去定义一下这个参数。那这边的话呢,老师先以两个为例,我们先以两个为例进行一个放置,我们先查看一下两个之后的他的一个结果。 首先那这边的话呢, x 因为长度是六百,然后呢六百,然后刨去一半的话就是三百。所以呢,我们再去做他的一个放置的时候呢, 先偏移一个三百的距离, x 三百,然后 y 的话是零,因为我们另一个方向不做阵列。放置 z 的话先零,然后旋转角度也是零,然后另外一个的话就是 负三百,因为我们要先放置两个,所以另外一个是负三百, 然后其余的都是零。然后呢,完成这一个之后,我们先检验一下,以这样的一个列表,我们只放置两个零件,这样的列表我们先检验一下效果,先看一下他会不会是横向的进行一个两个的进行一个放置。 那么在放置之前检查一下任务。任务一我们把这个任务一写到这个模型里边。 morning 哎,那这个时候可以看到首先正三百的位置 啊,负三百的位置 两个是没问题的。那我们再尝试着在两个的基础上再高一点, 那么我们直直接复制前面的两行, ctrl c, 然后回车,然后粘贴。然后这个时候呢我们直接在它的基础上增加一层,所以呢在它的 z 的基础上就是三百五, 然后呢我们放置三层, 这个时候我们再来去检验一下。检验过程中我们来再来发现一下关于人工搬运的时候所产生一些错误。 暂停,大家可以看到又是那个错误。首先人工在搬运的时候发现他的一个站立的一个高度是不一样的,所以我们先再去测量一下他的高度。五百五十六 我们在这个 oppo process 里边先把人的这个高度先解决第一个问题高度,也就是在原基础上加一个五五六。 好,这是第一个问题。 注意第二个问题。大家可以看到人工在去移动的时候,如果没有一些特别的限定,他会直接从两点之间线路最短的这一条路,然后进行一个行走,那这个时候他就可能会 穿过一些模型体。如果你在没有对他进行一个操作或判定,或者是说的一些路线设定的话呢,他会蹭穿过这个模型体。那这种情况怎么办呢?像这现在大家可以看到 人的模型已经和木板已经融为一体,很明显是不可以的。那这种情况的时候我们可以给他调入一个 路径的一个设置。那我们再去选择到 works pass 这个文件夹里边呢,我们找到有一个黑色三角,里边带有一个旋转的一个人工补偿组, 那这个补偿的话呢,做的是一个站立位置的一个设定。我们导住两个, 首先我把第一个进行一个位置的放置,然后第二个呢,再进行一个位置的一个放置,那这两个是作为是什么呢?首先这个组件大家可以看到它是一个等腰三角形, 然后呢,这个三角形的话呢,他有一个箭头,箭头所指的方向,或者说说这个字三角形,这个字 大脚所指的这个方向呢,就是人要去面对的一个方向,然后包括这个地标,他所你所放置的这个位置,到时候也是去设置人工去站立 工作任务的时候的一个位置。那么这边的话呢,做的是一个抓取,所以说他要站在这边进行一个抓取,那么放置的时候就站在这这一侧进行一个放置, 他不会跑到我们放置的另一侧,这样的话来回走的时候会穿过末形体,可以通过这个地标来去进行一个修正。那这地标怎么去使用呢?首先在去放置了之后,我们来去选择进入他的一个组建属性里边, 这里边大家着着重去看三个选项就可以了,第一个 take a task, 第二个 paste task, 还有第三个 process task。 做的是第一个是抓取任务,第二个是放置 任务,第三个是工作任务。那很明显现在人工做的是什么呢?抓取和放置任务。那现在以我现在鼠标所停留的这个位置,人工做的是什么呢?拾取的任务。那这一套任务叫什么呢?作为作为我们之前编辑的那个费德尼的 任务的任务名字叫做一。所以说针对这项任务的话呢,我们持取的任务就是先让他在 这个抓取的位置进行一个拾取,其他的就先删除了。抓取的时候在这个地标上直行,然后另外一个地标的话是在什么情况下呢?是在放置的时候站在这个位置之一, 然后其他的不做填写,我抓取的时候肯定不会再跑这边抓去,对吧?所以我们再去设定地标之后,我们来再来去执行验证。 那这个时候大家可以发现人工搬运抓取了放置,他就不再会穿过模型体,而直接是通过我们的一个设定,然后进行一个完成了。 而且在放置的时候,大家可以注意到,它的一个放置并不是之前所我们预料到的是横向,而是纵向的一个放置,纵向的一个战略放置, 然后放置的有三层。 那造成这种原因的话呢,其实有的时候也是和我 我们的这个 work process 放置方向是有关。大家可以看到这个我们在这个 ppt 里面 work process 是一个方向,然后再有一个是我们现在是另外一个方向。那这边的话是作为的是一个 零件的一个抓学放置。并且呢给大家做了一个地标的一个讲解。那现在的话关于我们第一个模块,零件产生输出,然后搬运阵列放置,并且加入一个地标,再加上人工的一个放置位置的一个修正,就已经完成了。 那么我们在完成之后,我们接下来将会去进入到第二个模块,也就是我们从第二个模块就是另一个拖板上进行零件的生成,并且能让他 人工对产线进行一个上料。那这是第二个模块。那在讲第二个模块之前呢,老师先暂停一下视频。
12dj 10:10查看AI文稿AI文稿
10:10查看AI文稿AI文稿哈喽,大家好,欢迎收看本期视频,这一期视频呢,给大家讲解一下帝国时代是模组编辑器里面生成单位调整包的详细配置方法。首先我们先建一个模组, 然后选择调整包,之后点选下一步,之后他会出现一个输入模组名称的一个对话框,这里呢,我就以调整中国火枪的数据吧为例,命名为 chinese and canada 这个名称吧。填写完对应信息之后呢,进入到调整界面,找到对应的文件之后,右键点击他,点选 克隆。哎,这里有个 unis can can 四 c h i 这个文件,点选克隆覆盖负极设置,然后确定之后我们就可以看到。呃,左边面板最下方啊,有一个我们已经克隆出来的一个文件, 通过这个文件呢,可以调整单位的生命值,造价,还有建造时间等很多的, 点选 extension, 然后找到。先看一下这个 cose e x t 这个文件吧,这里呢,有调整单位的造价。 对,我就不太想改他了,我想改一下他的生命值,在 挑选一叉 t 这个文件这里,然后找到一快,这就生命值了,我把它调成三百之后呢,呃,再调一下建造时间吧,目前是三十五秒,然后改成二十二秒,二十秒吧, 然后我们就找到下一步呢,就改一下他的攻击力,找到空 baysext 这个文件,然后有个哈斯筷子这个文件里面,找到 where pen table 之后呢,找到这个 no enemy weapon wests 这个文件目录,找到 vipansbpg 这个文件,然后右键他, 我们再转到参照之后呢,我们就会到达这样一个文件里面,然后同样也是找到这个 vipen canner cannon 四这个文件,然后右键把它也给克隆出来, 克隆出来之后呢,我们就是通过改这个文件,同样也是克隆覆盖负极设置。然后呢,在这里改 单位的伤害值,还有攻击距离等很多参数都可以改。那我这里主要是讲先改伤害值吧,在搜索这里搜索电脑局 一共有十九个类似的结果,那我们找到一级目录,一级目录呢,就是在左边第一条竖线下来这里,这这第一个就是他的一级目录, 然后我们看到有最大最小值是三十五,那我们改成两倍吧,改成七十吧, 改成七十克之后呢,我们再改一下他的攻击距离,我们在搜索框里面搜索 rage, 然后同样也是点搜索,然后找到他的一级目录,这里总共有九个结果,那我们依次来看,这也是 啊,找到一级目这里有个 max。 先说一下为什么是十六吧,因为帝国寺里面一格的攻击距离啊,刚好是四米, 所以十六的话对应游戏里面火枪的最远射程是四,那所以刚好是十六。然后呢,这里我们改一下,增加百分之五十的射程吧,把它调成 二十四米,也就是游戏里面他会变成六点的攻击距离。然后呢,改完之后再把它给保存一下,其实这一步也可以不用,但是为了保险起降,我们先保存吧,然后 再点选。呃,建造,然后生成模组,他生成了模组的时候,他也会帮你再保存一次的。这个刚才我们的操作呢,也是为了保险起见吧, 各路看电脑的性能了,呃,一般的话会比较快,如果成功的话,在页面的左下角会出现斯大厅 vd 选还有 nd v 选这两个文件,就可以看到他其实已经是成功了。为了再次确认吧,我们 来到他自动生成的模组的跟目录,找一下他会不会出现在里面。已经出现在 两个文件的 chinese hendankness demo 已经出现在里面了。 进入游戏之后呢,我们再点选魔主这里,然后看点到我的魔主之后呢,我们再 本地这里啊,已经可以看到我们的三个模组了,我们这个 chinese and cannas 这个模组啊已经是可以用了。呃,进入到游戏界面的话,我们 说一点吧,这点非常的重要。在我们的游戏设置这里啊,我们要点选我们刚刚创建的这个 chinese handle cannon stem 这个小笼包,之后点开 开始游戏就才可以硬把我们做的那个模组给他应用起来。我们看到现在呃火枪的生产时间已经改成了二十秒, 然后因为我是生到明朝了,还有百分之十的生命加成本,所以他总共的生命值是三百三, 然后攻击力是七十,加上他升级的加成吧,总共是八十四格的攻击力,然后他的攻击范围啊,刚才我们调的是二十四米,也就是六格 的攻击范围,那刚好验证了我们这个呃,修改啊,是成功的。 呃,视频的结尾放个彩蛋吧,就是升到满科技的。刚才我们调整的火枪之后啊,就是 非常的恐怖数据,然后看一下他的手成效果吧。那今天的这期视频内容就到这里了,感谢大家观看我们下期视频,再见,拜拜。 不动,我看就左手的方法已经别让我做成魔,马上再次归功, 东升利益。
83游人陈庆之 08:22查看AI文稿AI文稿
08:22查看AI文稿AI文稿节课呢,我们继续讲 a e 的这个动画方面的这样的一个知识点啊。呃,我们上节课呢,讲了这样的一个 a e 啊,它的这个动画非常核心的一个知识点,就是我们这一个关键认真它的一个创建以及修改的方法。那这节课呢,我们继续深化这一个关键针动画啊, 讲的呢是我们这个关键真辅助,以及呢他的这个动画曲线编辑器他的一个用法啊,那我们呢?啊好,那我们呢先打开这个软件啊, 好,打开软件之后呢,这边呢由我们这个上节课做的一个比较简单的啊小球从屏幕左边滚到屏幕右边的这样的一个动画, 简单设置了两个关键针啊,在两个属性上分别设置两个关键针,一个呢是这个位置,一个呢是旋转,对吧?然后呢我们播放看一下啊,我们上节课呢,做完这样的一个动画之后呢,发觉 a 感觉呢这个小球啊,他虽然是滚动了,对吧?但是呢总感觉这个动画呢非常的假啊,而且呢很很粗糙的感觉,对吧?那这个是为什么呢?就是因为啊,我们设置了两个关键针,对吧?那在我们这个日常当中啊,这样的一个 日常当中的动画,他从来没有一个啊,他几乎没有一个动画呢啊,不论说你是丢球也好,或者是丢任何东西啊,或者开车也好啊, 他都不可能是一个突然的云加速,然后呢突然停下来,对吧?他呢这个动画呢,他不可能是做一个匀速运动的,对吧?一般来说呢,你无论做什么东西都会给他一个加速度,让他呢从静止 变得运动,然后呢如果想要把运动变得静止呢?要给他一个啊刹车,给他一个减速度,对吧?有这样的这样的一个,呃, 有这样的这些力作用在上面之后呢,他呢会产生一个变速运动,那这个呢是比较偏向于真实的,对吧?所以说呢我们计算机啊,他当然,嗯就没有必要去给他加力去做动画,那这样的话呢,他会做一个非常复杂的计算,对吧?对于这种动画呢没有必要, 所以说呢我们就要用动画的这样的一个调节的方法,去模拟我们这样的一个现实当中这样的一个变速运动的这样一个方式啊。那怎么做呢?我们先给大家教一个简单的方法。 连的方法是什么呢?我们选择啊,然后说我们在这边选择一个,先选择一个结束吧,啊,这样的话效果比较明显一点,我现在看这个结束的这个,呃停止的这个关键针啊,到这边,哎,突然停住很假,对吧?那我们要做什么呢?让他做一个变 速啊,由运动慢慢慢慢静止下来的这样的一个效果,那怎么做呢?我们在这边选择这个位置这样的一个关键针啊,就是最后的这个关键针,然后呢右键这边呢会有一个叫关键针辅助啊,里面呢有。呃很多东西啊,我们看这三 里面呢有很多符啊,里面呢有很多参数啊,我们呢看后面三个啊,一个呢是缓入,一个呢是缓出,一个呢是缓动啊,那我们选择什么呢?我们在这边可以选择这个缓出啊,点击一下之后呢我们可以看到他的这个他的这个关键针啊, 这样子变成了一个诶小箭头的这个样子,对吧?那我们来看一下播放的效果 啊,可以啊,重新来啊 啊右键啊啊,然后呢关键真辅助啊,这边呢有这么多这样的一个,这个叫什么?这边呢有这么多这样一个命令啊,那我们呢看下面三个,一个呢是缓入,一个呢是缓出,一个是缓动,对吧?那我们先讲哪个呢?就讲缓入啊,我们点击一下,看一下他的这个效果, 我们现在可以看到点击之后呢这样的一个关键针啊,它变成了一个什么呢?变成了一个诶向右的一个小箭头的这样的一个样子啊,和我们这个之前的这个菱形的这个关键针完全不一样了,对吧?那它会起到什么效果呢?我们来看一下, 感觉没有我们这个呃小球啊,我们先不看他的这个旋转啊,呃,我们就只看他的这个位移变换,是不是他到结束的这个时候的时候,他有一个缓慢啊,缓慢静止的这样 的效果了,对吧?那这个呢缓入呢,就是说我们在这个这个关键针啊,要到达这个关键针数值的时候,让他呢做一个哎速度逐渐下降的这样的一个效果。大家如果那比较,嗯, 大家如果不好理解呢,就可以理解,比方说我们开车啊,在高速公路上做一个匀速运动,然后呢踩下慢慢踩下刹车,然后呢速度啊,不是一下子急刹车啊,是慢慢踩下刹车之后,我们这个速度呢是缓慢下降, 直到逐渐的停止,对吧?那我们这一边呢缓入呢就是模拟的就是哎缓慢下降的这样一个效果,好,现在看上去呢有点有点别扭,为什么呢?就是因为我们这个位移啊,他做了这样一个缓入动画,但是呢我们这个旋转没有做,所以说呢旋转的速度啊,和位移的速度他现在 不匹配了啊,他就会产生这样的一个效果,那我们呢在这边选择旋转的这个最后一针,同样的也是快线针辅助,然后呢选择到缓入,哎,这样的话我们看一下效果, 哎,看到没有,现在就自然很多了,对吧?我们这个关键针到这边之后有一种慢慢慢慢刹车的这样一个效果,这个显然比之前的这样一个突然静止的这样的一个效果呢啊,好很多了啊, 那在前面啊,我们呢把这个时间指针啊移动到开始啊,开始呢,我们现在可以看到他呢也是一个突然加速啊,突然的一下子开始运动,然后呢到这边慢慢的结束,对吧?那他呢也很奇怪,那我们呢在这边呢就可以选择啊,那我直接直接就选择这两个关键针了啊, 然后呢选择之后呢右键这边呢关键帧辅助,我们在这边呢可以选择第二个叫缓出啊,缓出是什么 意思呢?就是在我们这个关键针啊,远离这个关键针之后,他慢慢的出出去啊,他慢慢的出去的时候是做一个匀速的这样的一个出去啊,什么意思呢?点击一下就可以看到效果了啊,我们播放一下 啊,那先缓存一下,哎,看到吗?现在呢我们有了一个比较自然的这样一个动画,我们这个小球啊,感觉是一个 是有一个力,让他慢慢的往前推,然后呢慢慢的结束,对吧?那他呢就有了这样的一个缓入缓出的这样的一个效果啊,我们一开始的时候呢他是一个静止的,然后呢速度呢?慢慢慢慢提起来,对吧?直到速度在这边的时候速度是最快的, 然后呢到后面之后呢他的这个速度呢又逐渐的变慢,直到呢渐渐的静止下来啊,他呢是这样的一个效果,那这样 的话呢我们就达到一个什么呢?变速运动的这样的一个效果啊,画面呢一开始的时候呢是慢慢慢慢上升啊,直到呢最后呢慢慢慢下降啊,有了这样的一个比较逼真的这样一个效果,那这个呢就是我们的这样的一个呃缓入缓出,他的这样的一个 啊使用方法啊,可以看到啊,我们现在这个关键真的他的这个样子啊是完全不一样了,对吧?那这个呢就是我们啊,那这个呢就是我们关键真辅助他可以起到这个作用啊。好,那这这啊嗯 啊作用啊,那再讲第三个啊,我们呢在这边右键有一个叫呃缓动,这个是什么呢?其实呢他呢就是既缓入又缓出啊,怎么理解呢?比方说啊,我们在这边位置这个属性,这边呢 选择到位置啊,然后呢在这一边呢第一秒的时候让他创建一个关键针,让他呢向上抬一点啊,选择位置,然后呢把他 y 轴啊向上抬。由于呢在这边它一开始的时候是默认是没有关键针的,对吧?所以说呢它呢会产生一个关键针啊,好,我们修改完成之后呢,可以看一下。 好,修改完成之后呢,我们可以看到它默认呢会变成一个类似于漏斗形状的这样的一个关键针啊,当然这个关键针呢,它就是我们这个缓动的关键针,但是呢它这个缓动呢和我们这个 等会要设置的呢,稍微有点不太一样,所以呢我们先让他还原关键针的方法呢,就是按 ctrl 键,然后呢点击一下这样的一个关键针就可以,他就可以变回我们这个原来的这个关键针了啊,现在呢我们看一下啊, 哎,我们有了这样一个关键针之后,可以看到他到我们这个顶端之后啊,他并没有一个任何的一些速度变化,对吧?还是和我们这样一个平移的这个效果是一样的。
4壹号影视


