三菱d8340是什么寄存器

粉丝6.0万获赞7.4万
相关视频
 01:37查看AI文稿AI文稿
01:37查看AI文稿AI文稿三零四五定位会修改到哪一些寄存器呢?不清楚怎么使用的同学请仔细看到最后。老规矩,小赞赞走一波, 您的点赞是周老师更新的动力。以下的讲解呢,以轴一作为标准,第一个 d 八三四零,记住哦, d 八三四零是双字的长度,他主要用来寻找是否的当弦为止。我们可以把它连接到触摸屏上,让操作人员知道我们 工作台的当前实时位置。第二和第三个为最低速度和最高速度,这两个呢,我们不需要去改,按默认就可以。第 第四和第五个为低八三四五和低八三四六,记住,低八三四六为双字的长度。圆点启动后,是否会以低 低八三四六的速度寻找远点,碰到远点以后呢,他就会降到低八三四五的速度,慢慢爬行,离开远点停止。第六和第七个为低八三四八和低八三四九加减速时间。 什么时候我们会改动它呢?一般在我们启动的瞬间,机构震动比较厉害的时候,我们一般会把它调大。特别是有一些同学经常会碰到一个问题,就是 我们一启动,不仅我们会发现他卡机,这个时候呢,你只需要把加减速时间调大,就能解决你的问题哦。同学们,你们认为以上的计算器哪一个会百分之百用到呢?
756龙丰优屹教育PLC培训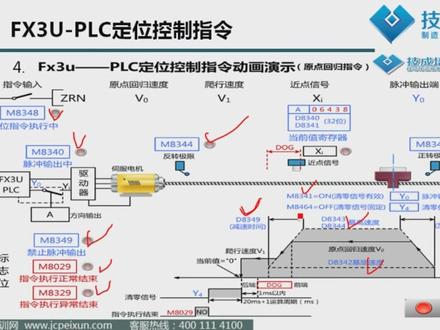 08:32
08:32 16:20查看AI文稿AI文稿
16:20查看AI文稿AI文稿大家好,这节课呢,我们继续讲解我们的三菱 f f 四三一功能,它的一些运动控制相关的一些功能,那么我们三菱 f f 四三一功能,它的本体呢,是支持这个三轴的 定位控制的啊,然后呢,如果我们给三优的 prc 呢,配两个高速脉冲的输出时代器的时候呢,他的本体是可以带四周的啊,是这样的,他这一个做这个运动控制的一个能力啊,然后呢,我们 做运动控制的时候呢,是配合着一些相关的指令的,那么我们这节课主要讲解的呢,呃,是我们的这个高速脉冲输出指令啊,那首先第一个指令啊,高速脉冲的输出指令,指令符号呢? bls 杯这个指令呢,他带有三个操作数,那第一个操作数呢,我们指定的是一个 脉冲的输出频率,然后第二个操作数呢,指定的是一个脉冲的输出总量,对吧?频率指定的是速度,总量走的是一个总的位置值, 走的脉冲竖啊,那我们如果我们在这个第二个操作术这个位置设置为一个零的时候呢,那么这个指点做的呢?呃,是一个连续输出的啊,就不是说啊,他不走啊,是连续输出的啊,一直走不停啊,是这样的, 呃,然后第三个这个操作数呢,代表的是脉冲的一个端子啊,一般呢只能选择歪零歪一啊,对吧? 其实我们三要是可以选择歪零歪一歪二三个点是可以都可以发挥这个啊,发这个脉冲的啊,我们这个 prsy 这个指令呢,本身是一个十六倍的一个定位指令,而这个高速脉冲的输入指令,那么这个指令 的时候呢,他发脉冲的这个啊,总数啊,这个速度啊,是不能超过三十七六七的啊,原本这是一个十六个指令吗?对吧?那如果我们需要走的距离比较长的时候呢,我们可以在这个指点前面加一个 d 啊,叫 dplsy, 这个呢就是一个三十二 二位的高速脉冲的输入之力啊,那么这个时候呢啊,他的速度最大可以指定到十万,然后呢,呃,他这总的这个走着脉冲数啊,发着脉冲数啊,这个就可以更多,对吧?最大是二十一度啊,是这样的,然后他的指针 很多事呢,比如说 prs yk 一千 k 三千 y 零,那么这个指定说例子呢,就是以 y 零这个点来发脉冲,发脉冲的时候呢,我是按照每秒一千个脉冲的速度,总共呢发三千个脉冲啊,以一千的速度,对啊,发三千个脉冲啊,这是他的一个 个功能啊,然后呢当指令啊,发完三千个外甥之后呢,通常呢会接通我们 m 八零二九一个三个周期,这个 m 八零二九呢是一个特殊辅助继电器啊,他的功能呢啊叫做指令完成的一个标志类,就当你这个连续真实的指令工作完成之后呢啊,他就会接通 m 八零二九一个 这三个周期啊,代表呢我们这个脉冲啊已经已经发送完毕了,是吧?已经发送完毕了,是这样的。呃,然后下面这个呢,我们可以接通这个做一个复位条件呢, 复制 m 零等待下载的一个启动信号啊,就是这样的一基本格式,然后下面有几个注意事项,我们看一看这个注意事项啊,那么第一个注意事项他说呢,说是该指令为连续的这个接通类型的指令,对吧?啊?意思就是 说想要把脉冲完全输出呢,那必须连续接通该指令,直至输出完毕啊,那现在呢?呃呃,这啥意思呢?就是我们说这个指令啊,就比如说还是上面这个例子吧,他一共不是要发三千个脉冲吗?对吧? 如果我在发卖送的过程当中,对吧?不是发了一千五啊,或者发了两千个,反正就是没发完啊,那没发完的时候呢,如果你把前面的条件断开,那么这个指令他没发完的就不再发了, 指令已经不执行了,他剩下那块他没走了,他就不会再走了,包括我们下次再重新接通这个指令之后呢?他没走完的啊,上次没走完的,他也不会给你补的啊,他也不会给你补的啊,他是这样的,对吧?那就是这个指令,包括我们第一批 sy, 他也是, 是一样的,对吧? dps 就三十二位的这个高速脉冲输出之类也是一样的。然后呢?脉冲输出完毕之后,他电动 m 八零二九一个散门周期啊,一个怎么周? 呃,就作为一个指定完成标志位吧,对吧?完成标志。然后第三个 prc 的输出类型要选择经济管输出类型的,之前我们也说,我们也说过这一个,对吧?讲硬件,硬件结构的时候,我们说接电机输出类型的 prc 呢,是不能做 定位,做这个硬的控制的是不能发脉冲的,对吧?所以想做定位控制,想发脉冲的时候呢,我们一定是要选择经济管输出类型的, 那第四个平均设定请不要超过 prc 的一个允许范围,我们三优呢,他的最高速度支持的是十万啊,就每秒钟十万个脉冲啊,这最快速度了,这硬件的硬件规定的啊,啊,下面第五个啊,第 主播的,但是我这个位置不用看,对吧?因为现在呢啊,高速脉冲输出指定 prsy, 在这个当今时基本就是看不到这个 值的变化的,我们只有使用后边的相对定位指令啊,啊,绝对定位指令和原点指令啊,这些指令,才能看到这一个啊,才能看到这个当前指的一个变化啊,是这样的啊,这是一个第一个最啊,第二个指令呢,我们看 的是一个叫带加减速的一个高速脉冲的输出指令,那么其实这条直呢,和上边的 ps 还差不多,只不过是多了一个脉冲输出的加减速时间啊,这个呢,就有点类似于你开车是一样的,对吧?你说我这个 开车可能要经过一段高速啊,高速的速度可能都是一百码,对吧?然后呢就起步速度肯定是零吗?对吧?从零开始的,但是从零到一百码,他肯定是需要一个时间的,需要一个缓冲的 时间的,对吧?那同样我们这个电机的运行呢,他也是一般啊,一般也是需要一个缓冲的时间的啊,你不可能说我这腰一踩下去就是零到一百,对吧,这是不现实的啊,所以说呢,我们一般呢会给他做一个这个缓冲的时间,加 加速也好,减速也好,都会做一个缓冲的时间的啊,那所以呢,我们这个就做了一个叫带有加减速的这个高速慢动输出之类啊, prs 二啊,就这样啊,然后这个指令呢,它相对于 prs 来说呢,只是多了一个操作数啊, 我们也看一看这个指令,他这个指令里面规定呢,我第一个操作是叫最高的一个输出比例,是最高速度,对吧?啊?最高速度,第二个呢输出脉冲总量,这个呢还是没平,对吧?总量。第三个呢,加减速时间之前不是说可以试试这个加速时间跟减速时间吗?对吧?这个第三个操作数就是干这个事情的 啊,但是有一点我们在 pls 啊,这个指令里边呢,他的加速跟减速时间啊,只能是设定成一样啊,这不能说加速时间是一百毫秒,减速时间是两百毫秒,这个指定不了啊,你这个位置设置一个时间之后, 他就是加速减速啊,都是这一个时间啊,都是这一个时间。呃,然后还有一个就是啥呢?就是我们说啊,他刚才加速减速时间都是一个吗?对吧?啊?还有一个他这个时间啊,是你合买为单位的,就是你上电时间,上电 百一百毫秒,这那五百呢?就是五百毫秒啊,对吧?啊?以毫秒为单位的啊,呃,然后这个啊,下面第四个就是一个脉冲的一个输出端子,就是你经过哪一个点发的脉冲,对吧?脉冲的输出端子这个都是一样,都是一样的啊,然后下面呢这个指定格式 ps 啊, 千可以一千可以三千,呃,然后可以一百万零,就是还是八零这个点来发脉冲,对吧?他是呃最低发脉冲的最高速度是一千,然后呢一共发三千个脉冲,从零到一千加速的时间是一百毫秒,从一千减到零减 元素的时间也是一百毫秒啊,也是一百毫秒,对啊,是这样的,然后呢下面的话呢,我们就看一看这两个时间在我们软件里边的一个编写的格式啊,编写的格式,那我们首先看第一个 plsy 这个时间,那 首先呢,我们做一个技能调定 m 零啊, m 零启动之后呢,我们执行一个 p l s 掰啊,执行一个十六倍的高速脉冲的一个输出指令,那么高速脉冲输出指令那后边带着第一个操作数呢,指定的是一个频率这个频率值,当然你可以直接写一个数值,然后呢 我们也可以选一个计算机啊,作为一个接近机指定速度的这个松动器啊,比如说做一个地林啊,然后呢第一对吧啊,第二个是一个这个位置值吧,发的脉冲数,对吧?一共发多少个脉冲?第三个 操作数啊,发脉冲的一个端子,对吧?以第零的速度发第一个脉冲,发脉冲的端子一百零啊,对吧?然后呢那你说我这个指定什么时候出去玩呢?当你指定第一这个脉冲数的时候,他发完这个脉冲数,他就会接通 m 八零二九,一个什么都, 我们可以使用 m 八零二九呢,作为我们负面提供条件的啊,一个执行条件啊,一个执行条件,对吧?但是这个位置啊,我们也可以把它指定为一个一个数值,一个速度值,对吧?比如说我现在就是以一千多速度,然后呢一共发三千个脉冲,嗯,这都可以,对吧? 指令计算器时间数值啊,都可以啊,都可以啊,就是这样的。呃,这是我们说的第一个指令,然后说,呃,那这个指令他在执行的时候呢,他是朝正向的去发这个脉冲的,就是朝正方向去走的,那你说我们这个 prsy 这个指令能不能反方向去走? 当然也是可以的,如果想直接反方向的时候呢,那我们再做一个 ps y 啊,可以一千,可以三千。然后呢这里啊,那可能写到这的话呢,我们会发现他这个指令 是呢,其实呢,呃,都一样,对吧?那都是一样的,跟上面这个一样的。哎,你说这个怎么这个他怎么改变方向呢?对吧?如果我们想改变方向的时候呢,我们一般啊会做一个条件啊,做一个什么呢啊?这个位置,比如说我们在吃的一个外形啊,那如果我们作为 这个 y 四这个点呢,我们接了一个控制方向的一个信号的 y 四作用方向控制,那么当置位了 y 四之后,代表 我要通过外四方向信号这个端子,我改变一下他运行的一个方向,改变他运行的一个方向,对吧?啊?是一个外四,那么这个时候呢他就可以朝反方向去走,嗯,这个是正向,这个是反向,然后说反方向走也是一样的。当脉冲发送完成之后呢, 八零二九,我们可以再把我们的 m 一条件复位的同时呢,也可以把我们的这个方向端子给它复位掉,把方向端子也复位掉,这个是正向的啊,这个呢?下边这个是反向的,这个是反向的,然后 那这个是一个十六位的发来冲的实力啊,我再再写,再写一个这个,这个三十二位的,对吧? m 二一批 lsy 啊, 我要以两万的速度,我一共呢发二十万个脉冲,然后呢发脉冲的时候来临,对吧?咱这个也可以指定一个计算器啊,但是这个指定计算器的时候呢,不要忘了,这个是一个三十二位的指令,三十二位的指令,他的操作数啊,速度啊,脉冲数, 都是要指定三十二位的计算机的啊,对吧?这个位置,所以这个一定要注意啊,这个也是一样的,发射就要脉冲了,完成之后 m 八零二九把 m 二复出掉,复位和启动条件啊,朝正方向的, 那如果朝反方向走的话呢,也是一样的 m 三啊, dplsy, 我们还是以啊两万的速度啊,发二十万个外收啊,歪平,对吧?然后呢,当执行的时候啊,想朝反方向走吗?那肯定也是要做一个啊,车位外四动作 作为方向信号的,对吧?然后也是一样的,当动作完成之后,我们再复一下我们的其中条件,同时呢再把我们的方向信号再复一下,这个就穿反方向走的啊,穿反方向走的,那么这个 时间,刚才有时候他有一个问题就在于啊,他这个速度是瞬间达到最大的,对吧?很达到最大速度,时间那是很短的啊,他没有一个缓冲的时间,如果想做一个时间缓冲的话呢,我们是可以执行这个 plsl 这个制定的 啊, ps 啊啊,指令格式啊,我们接着往下斜 m 四 pls 啊,然后呢做一个速度考试的一个最高速度,然后呢设置一个脉冲数啊,把它脉冲数, 第三个呢,我们设置一个加减速的时间,比如设置一个一百毫秒放在他的微波里,对吧?啊?指点一个加减速的时间啊,然后这个也是一样的, 当指令完成之后呢,我们 m 八零二九把这个启动条件把它复制掉就可以了啊,但是这个也是一个发正向脉冲, 如果想发这个副方向外圈的话呢,方式跟上面是一样的, ps 二还是一样是一千吧,可以三千,加进度时间一百,然后呢为零号脉冲,对吧?直接 的时候呢,可以做一个条件,我们质位我们的一个外四,对吧?然后 m 八零二九啊, m 八零二九,八零二九完成之后呢,可以把其中条件 m 复为调,同时呢再复为掉模外四啊,发扬信号的一个端子 啊,对吧?正向的反这样的,这样的,然后我们如果做的是一个三十二位的这个带有加减速的这个脉冲输时的, 那就是 m 六啊, dpls 二,这个速度可能更快,对不对?可以两万啊,可以二十万啊,然后加减速时间是一百啊,然后呢外流防脉冲,对吧? 为了分配成这个也是一样的, m 八零二九完成之后呢,可以复一下我们的情景一点, m 六啊,也是发正向的,如果反向的话呢,也是也是一样的,第一 psr 还是可以两万的速度,我们发二十万和脉冲啊, 二十万个脉冲,然后呢加年度时间一百毫秒来临,对吧?然后这个也是一样的, mep, 我们启动啊,直接是为一个方向端子,然后呢下边 m 八零 二组完成之后输入掉我们的其中条件目期,同时啊再输入掉我们的这个方向信号,一个 反方向运行的,对吧?一个反方向运行的,呃,那么这个就是一个带有加减速的一个这个高速脉冲的一个输出指令啊,然后整个指令的指令格式的话呢?其实,呃,这个道并不是很复杂, 操作数稍微比较多一点而已啊,对吧?然后呢我们看这个大概从头到尾再看一看吧,这个指令格式,对吧?十六位的啊,他指定分为十六位跟三十二位的啊,十六位呢,他走的距离可能发生半生数比较少啊,没有那么多,如果做的是一个三十二位指令的话,前面加个 d 啊, 指令前面加个 d 代表是一个三十二位的一个控制指令啊,然后呢他这里发的发动脉动数就可以更多,然后呢指令完成之后我们接通啊, m 八零二九一个三个周期作为一个指令完成的一个标志类啊,然后呢当然我们这个做定位控制的时候啊, 我们下边这个位置可以为在 m 零同时呢啊,我还可以,还可以在什么呀啊?这个位置其实他可以在直接置为一个 m 一,啥意思啊?这个走完之后连着就走这一个 啊,都包括后边都是一样的,可以再接着往下写啊,一个连续的运行的,对吧?这都是可以去做的啊,但是这个啊只是其中一种格式而已啊 啊,然后这是三十二,就是我们三十二位的,还有十六位的一个高速迈腾的输出指令啊,然后呢朝反方向运行,不要忘了这个这个方向信号啊,他这是可以改变方向啊,可以改变方向的。然后下面呢,我们做 pls 啊,这个变速带 加严重时间的这一个,这个,呃,高速排出输出指令的时候,指令格式也差不多,对吧?十六位的啊,下边这个加地的带到三十二位的啊,对吧?然后呢如果说 运行啊,加一个智慧方向信号的,这个智力啊,智慧方向信号啊,指令完成之后呢,把这个条件把它复位掉, 复位掉就可以了啊。呃,那么这是我们关于这个高速脉冲输出指令把他的一个理论部分的知识啊, 那我们这节课的主要内容呢?大概怎么读啊?然后呢,我们下节课呢,讲解这个定位指定还有我们的回应题,那么这节课呢,就到这,我们下节课再见。
451星途 14:59查看AI文稿AI文稿
14:59查看AI文稿AI文稿好,我们来讲课三连皮耳机、数据计算器等功能以及编号,大家看我们会议介绍计算器相关的知识, 大家也可以咨询翻阅手册变成手册的六十一页,我们看一下计算器的功能。数据计算器顾名思义就是用于存储数据数值的软件键, 在我们实际的设备程序中,主要用于存储用户的设置参数,实现不同的公益需求。 处那个 d 计算器的编号,我们可以从下面表格看,表格上看出, 在 fx 二系列的比尔西当中,他计算器可以分为 一般用, fx 二,一般用的计算器有两百点,第零幺九九, 第零到低幺九九,别急停电宝使用 三百一十二点,从第两百到第五幺幺, 以及第三第三个分类,停电保持专用。停电保持专用就是 仅用于天天宝石用,而不能设置成一般用。前面我们说的一般用和天天宝石用都可以在我们 prc 变成软件中进行设置。 停电保持用可以设置成一般用,一般用,也可以设置成停电保持用,而我们这一个他仅能用于停电保持用。什么是停电保持呢?就是配耳机,在旺布的功能电源去除的情况下,他能够保持数值的不变, 比如说 d 幺二八,当前的数值是一百,在 plc 外部电源断却的情况下,一百的数值不会,一百的数值不会丢失, 里面的竖折就会丢失, 哎。第四部分就是文件,文件专用,文件专用我们用的比较少, 我们就暂时不做讲解。 特殊用就是第二吸系统内部固定的具有特殊功能的数据计算器, 比如说正在地位方面的 x 走当前的脉冲数,他会时时的那个存储,在特定的存储期中, 我们在后面具体应用当中会具体收到特殊用的计算器, 其实特殊用的计算器在我们实际当中用的是很少的, 我们后面用到的时候再进行详细的说明。 另外是指定的电子计算器,我们在具体收到电子计算器的时候,在下节课我们也会对这个电子计算器做 做一下更具体的介绍。 计算器的分类从我们刚才的表格上可以看出,可以分为一般用、停电用、 adc 系统固定特殊用,列表在 变成手册的三百九十五页,系统用的计算器,那个编号范围在第八千到第八千二百五十五, 会在我们电量所测试中,所罗列的计算器是商城三年公司用于系统处理的原件,建议不再变成我们的程序中使用。我们下面大概来浏览一下特殊用的计算器的列表,看一下按 场合又可以分为什么类型,可以看出按场合可以分为第一类,栖息状态用 和时钟用以及标志用,这就是 pc 模式用, 附近接听用。这些表格都可以在我们的编程手册三百九十五页进行具体的查阅, 我们进做个了解一下,继续往下看,可以看出还有错误检测用、地粘电路功能用、采样跟踪用、 高速滑行接触器用,以及存储器容量用,以及输出刷新用,通讯链接用, 以及我们的还还是在实际的定位当中非常用到,高频率用到的定位用,以及扩充功能用。变者计算器当前值得记录用, 可以看出按时用场合分可以分为必须状态用、时钟用,标志用,必须模式用等等等等。 不同的应用场合在我们实际编程中,在不同的应用场合会涉及专用的应用整理, 呃,专用的应用指令,首先都会做大边幅的介绍和边端实力的讲解,在我们讲到应用程序 此类的时候,会对涉及的地计算器做针对性的讲解。在我们实际的编程中, 除定位功能外都很少用到特殊用计算器,大家客户可以放一月手册的三百九十五元,对不同特殊计算器有个印象即可。 d, 计算机的使用形式,在我们实际的项目程序分析中,一直 计算器主要用于改变计时器,计时器等,这里数值更改的地方一般用吉林木或者是外部的智能仪器仪表进行更改数值, 如常用的触摸屏读取修改地址下我下面我们具体用编程软件来演示一下给大家, 我们可以打开第二期的分享软件, 新建一个工程 iphone cpuficon 的类型,我们我们随意输入一个 三千元的 m m 零, 一般我们可以把在计时器,在我们输入计时器的时候一般会写成七零 k 二三,计时器的计时时间我们写成固定量, 这是我们这种计时器的输入,是我们常用的一种输入形式, 在需要更改计时器的设置值的时候,我们可以那个输入这样的形式低零,这这种输入形式就是表示 计时器的设置值可以进行修改。如何修改呢?计时器的设置值我们可以 以这种形式,这种木屋的直列进行修改,我们可以用一个木屋直立 mov, 比如这样我们要将地林的直设置成一二三,我们就可以这样写, 我们执行一下 m 一长, m 一闭合一下,然后我们第十七的低零就更改为了一百二十三, 就像一百二十三的值写入到了 定时器的设置值当中。 除了用木指令更改地灵的值,我们还可以通过外围的智能仪表仪器, 比如说我们触摸屏就可以更改 d 零点值,进阶更改我们这个电磁器的设置值,我们可以打开演示一下,给大家看未来的变频,那个变频器的那个触摸屏的编程软件, 我们可以新建一个工程默认的型号, 我们可以在编程编辑操作设置里面添加一个三零 pls 的编程软件,那个 prs 的型号 我们选择三厘米 q, 每次必须的去 coplay 选森林 psc 的公司,然后 fx 二的型号赶紧确认, 我们一些通讯的形式全部保持默认,参数什么的默认确认,我们添加了一个三零 ps 编程软件,然后点击 oplc 的型号,我们点击, ok, 我们添加一个按钮, 这个值,按钮对应的值我们就可以对应,对应上三零 p 二七幺,这个是二 n 的第零。 ok, 这个这个编辑框是什么?是什么呢?我们来个标,那个 注视说明一下,我们可以把它注视成这是计时器 t 零的数值,我们可以改成计时器, 可以改成计时时间, 修改技术时间, ok, 我们可以模拟在线模拟一下,把这个工程保存在桌面, 他现在变异 好,我们在这里就可以在冲泡瓶上就可以修改我们计时器 t 零对应的低零的这个存储区的值,从而改变计时器 t 零的时间。我们可以在这里随意修改一下,输入一个数值 mant, 我们只要按下 ante, 他会触摸屏跟 prc 是实时通讯的, nt 按下之后我们的这个幺四五就会显露到 d 零当中,从而改变 t 零的计数值。计时的时间 啊,我们这个也是在这里, 这是存储器, 用在计时器上面,我们用在计时器上面也是一样的, 我们可以把这个操作修改一下, m 一改成 m 三 m 二, 我们这个计时器我们改成计数器,西宁第一也跟上面是一样,我们再加复制连接过来, 嗯,是, 这就是存储存进去, 存储器用在修改计时器和计数器的当前那个计数值的上面, 更多的关于存储器的作用,我们会在后面说到 功能指令的时候再做进一步的进一步的解释。了解 好了我们 计算器的介绍就说到这里, 其实痔疮剂也是非常简单的,他仅起一个存储以修改数值的作用。
107糊涂一点 01:22查看AI文稿AI文稿
01:22查看AI文稿AI文稿大家好,我是胡老师,最近有粉丝问这个三菱 plc 的这个停电保持继承器,他的范围是不是可以设置? 我们三 u 跟二 n 的这两个型号的这个停电保持在这个计算器,它的范围是可以调的,默认是从两百开始,那在哪里调呢?在这个参数有个 p、 l、 c 参数, 这里有一个软元件设置,在这里我们可以看得出来,不光是这个承重器低可以设置,他默认是从两百开始到五百一十一, 其他的也是可以设置的。 m 的范围也是可以设置, s 的范围也是可以设置, c 的范围也是可以设置啊,那我们 这里默认是从第两百开始,例如我改为这个从第一百开始,那我们就输入第一百就可以了,然后上线也可以设置离我上线到这个第四百, 然后设置结束就可以了,然后这个时候他的范围就变成了一百到四百,停电保持的 那五百一十一以上的是没办法设置的,这个是固定的,这个是固定的,还有就是其他的型号也是没办法设置,大家学会了吗?关注我,分享更多 poc 知识!
213PLC培训时进教育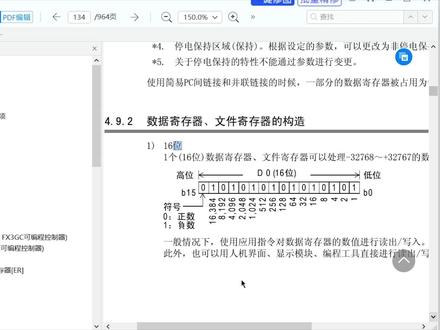 05:35查看AI文稿AI文稿
05:35查看AI文稿AI文稿我们接着学习三年 p、 l、 c 的基础知识。数据计存器就是我们经常在程序里面用到的 d 存储器, 比如我们程序里面的第十、第十二、第零、第二,这些都是数据计存器。三菱 plc 的数据计存器,他都是十六个位,比如下面的低龄存储器, 它有十六个位,从 b 零到 b 十五,一共十六个位, 每个位的表示方式只有零和一。我们看这里, b 零到 b 十五,它所有的 位数都是一零或者是零,那么就是一。那么在 plc 里面位是一个什么东西?我们看这个图简单了解。 v i t 是计算机中最小的数据单位,也是二进制系统中的一个位,它的表示方式只有零或者是一两种状态,你不能用二、三、四、五去表示。 way 是一个数。 way 它是二进制,只有零或者一两个数来表示。 way, 它可以表示开关的状态, 比如我们的 x 零端口断开的时候,就可以表示为零。一可以表示开关的接通,比如 x 零端口接通,它就可以表示为一。像我们程序里面, 比如我们程序的 x 零接通,那么你用二进制的未表示,他就是一。 x 零断开,用二进制表示为零。下面的 m 零辅助继电器,它也是一个二进制的位,当它接通的时候,可以用一表示, 它断开以后,可以用零表示它,所以一个 way 它是二进制, 要么是零,要么是一,就是一个位。所以在我们的三零说明书里面,低零存储器他有十六个位, 他的每一个位要么就是一,要么就是零。下面的字节 八个位组合在一起,他就是一个字节后面的零零幺零幺零零幺,这里就是八个位,八个位,他就是一个字节。下面的字 由十六个位组成,幺零零零零幺幺零零幺幺幺幺零零, 是你正好是十六个二进制位,他们组合在一起,就是一个字。十六个位组合成的字,在三菱的皮尔西里 表示为我们的数据计算器。低存储器有十六个位。 b 零是最低位,低一个位。 b 十五是最高位,低十六个位。那么三零的低存储器,它就是一个 字,有十六个二进字数。三零片心里面的双字。第一,他是由三十二个位组成,三十二位,他是由两 个相邻的数据计存器合并在一起。那就是说三菱的 plc, 它其实没有三十二位的存储器,它是有两个存储器合在一起使用。如下面的低龄, 他是从 b 零到 b 十五十六个位,再加上 d 一 d e, 它同样有 b 零到 b 十五十六个位。 那么你把低零存储器和低一存储器合并在一起,他就有三十二个位,就是从 b 零到 b 三十一、三十二 各位组合在一起,就是三菱 ps 里面的三十二位数据计算器,他是有两个相邻的存储器合在一起的。零加上一一,他就是三十二位的存储器。 如果你的低位是低二,那么他就和相邻的低三组合在一起,形成三十二位的数据计算器。那么在什么时候我们才会用到三十二位的数据计算器呢?
205知多工工控知识 07:26查看AI文稿AI文稿
07:26查看AI文稿AI文稿大家好,我是临时高图 p 二 c 培训学校樊老师,每天关注几分钟,轻松学会 p 二 c。 大家可以通过二维码或者点赞转发都可获取上面的 资料和软件。我们将会在这里学会三菱 p 二 c 编程,西门子 p 二 c 编程,新捷 p 二 c 编程。当然也会学习私服 步进电瓶器,模拟量定位,控制气缸等等操作。学校有各种大型机器给同学们进行实战,樊老师将会手把手实战,教学时间短,见效快。好了, 我们一起来学习吧。老铁们。大家下午好!今天我们学习三零 p 二 c 当中的内部 数据计程器。第一,很多同学对这个搞起来是有一定的难度,那今天呢,我们把它 简单化教学,让同学们几分钟啊就可以学会这个继承器的应用。首先我们看一看这个内部继承器呢,主要是有十六位和三十二位,什么时候是十六位,什么时候是三十二位呢? 默认状态下就是十六位,我们规定他为三十二位时就是三十二位了。那么怎么规定的呢?那么我们可以传值的方法,这是最普通的,那么今天我们就讲这个传值的方法,那么讲是 m 一通,然后我们就 m o a 空格, 那 k 假设是四万,那么然后第二,那么我们如果这样去操作的话,我们确定大家就看到结果是不可以的,为什么呢?因为我们这个地方的这个 k 的这个数字已经超过三二七六七,因此 他不能用木物来付值,他必须要用第一木物来付这个值,才可以把这个四万的值付到第二里面去。那么用了第一木物以后,我们的第二就是三十二 喂的一个继承器了,大家可以看一下,那么这个继承器就相当于我们的一个水杯一样,那么这个就是水,那他呢可以装到这个杯子里面去。那么有的同学就要问了,那么这个第二,他现在是三十二位,那我可不可以 继续用这个方法?第一步去传值,假设两百万,然后传到我们的第三呢,这样他就不行了,因为我们这个三十二位继承器呢,他实际上是用了两个连续的十六位,什么意思?也就是说你可以把第二当成了 十六位,那这个地方呢,第三也是十六位,他们两个组成一个三十二位。那意思就是说你用了第二第三就不能再用了,他们两个是捆绑,那这样的话就是错误,我们只能 第四就可以了,这样就可以啊,这样我们这两个呢,他用反了,都是三十二位,那他呢第二和第三,他呢第一四和第五。那么如果是传十六位的呢,那么我们就可以用下面 这个数字。举例如果我们用 mov, 那么 k 一百传给第五,那这个时候我们是可以继续传,传直到第六的,也是我可以继续 movk, 随意啊。 第六这个是可以的,因为这里用的木船的这个数字就是十六位,那把十六位的数字传给第五,那第五就是十六位。 那么这里呢十六位一个低就是一个十六位,那他就可以这样做。 然而这个低木呢,他就是简单的说,只要你用了低木,那么第二和他后面的这个数字就第三就成为一体了,那就不能用了,在我们这个 可以观察一下,大家可以利用这个来观察一下,我们副职的话还可以通过其他方法。那现在呢我们就看一下, 那这里呢我可以啊右键那这个地方呢,我们有个调试,当前这个字更改,我们可以选择数据流行为 搭个沃尔的,那么这个就是三十二位,那我在这里填的子弹就可以填到三十二位,如果选了沃尔的,那就是十六位。下面还有一个福点数, 那么我们现在来看的是什么呢?我们来看一下。这里右键我们选择在线软元键,我们来监视一下他的这个效果,那现在我们要看的是第二, 然后呢我们给他执行哎,这个第一位啊,你们同学们一定要记住啊,这个第一位我们没有给他输入任何题的时候,他默认之为零。 那现在呢,我们第二啊。回车大家可以看得到我们在第二的这个位置,它显示了一个复数,为什么呢?原因是我们这里呢使用了一个十六位的这个显示效果,我们把它换成三十二位, 他就显示的正常的。大家可以看到这个时候呢,我们可以看到第一山,他这个里面呢是没有放任何东西的,那么没有放任何东西呢,那就意味着他也被占领了啊,他 不是说没有数据在里面,他等于是第二和第三,哎,两个计算器都是三十二位,如果我们用十六位呢,大家可以看到这个第三啊, 他啊我们写个第二,这里的这个第三,他也是一个第啊,那么我们看一看这个第四, 那第四和第五,第四是两百,第五呢是一百,那么我们这个地方呢,把这个数字啊,他就出现问题,那就出现故障了,那么我们明明是传了两百,但是呢我们这里呢 用了第五,所以他就有冲突,那么这个就显示错误了,那怎么操作呢?那么我们就取消 一下,同学们看一下,那么我们就不要把这个低音占了啊,那么我们怎么办?我们改个低音第八,这样的话大家就可以看得到,我们这个就不会再错再有错误了。所以同学们一定要注意,我们前面用了这个 三十二位以后,我们后面的这个就千万不能重叠。大家再来看,我们同样给他灌进去,那这个时候他就正常,那么我们可以看到来 第五他也是没有备用的,大家记住啊,因为第二他这个是一个十六位的显示,所以就不真实,我们一定要换成三十二位整数,这样他才能够显示到我们一个真实的一个数据。今天的课程就上到这里,希望同学们能够学会。
 02:04:08
02:04:08 09:21查看AI文稿AI文稿
09:21查看AI文稿AI文稿上一个视频中踢零定时器,他的时间是由十进制数可以三百来制定,下面的踢一定时器,他的时间指定是由低时存储器,存储器里面的数据我们可以去改变,他 改变了低时里面的数据,那么就等于是把 t 一定时器的计时时间做出了改变。那么这个低存储器是什么?我们要先了解它。 这里的内容是 fx 三 u plc 的编程手册,我们可以到三零机电的官方网站去下载。第一存储器其实就是一个数据存储器,里面可以存储数据,包括二进制数、 十进制数、十六进制数,那么他也分有一般用停电保持用停电保持专用。 我们先看一般用,一般用它的编号是从 d 零到 d, 一百九十九有两百个点,这个是三 upl c, 它有两百个 d 存储器一般用行 fx 三 g 的它就少点,三 s 的有一百二十八点。那么一般用的这个低纯属器,它的特点是 plc 掉电之后,它里面的数据会被清零, 停电保持用,那么是指 plc 掉电之后,它里面的数据会继续保存起来,因为 plc 里面有一个后备电池,他可以继续为这个存储器供电。下面这种停电保持专用,他的点数就非常多。这种存储器他的特点是他的编号范围,我们是不能通过参数去更改,他 像这种停电保持用,他就可以改成一般用。 那么低存储器,他是一个十六位的数据存储器,一个一是一个位,一个零是一个位。 第一层主机有十六个位,那么他就有十六个二进制数,像这些二进制数、十进制数这些内容我们以后还会有视频详细的讲解,我们现在是看 是一个定时器的设置,我们这边的 t 一定时器是由第一时指定他的计时时间,那么第一时的数据我们就要去设定他。我们先把软件连接到模拟运行状态, 我们可以看到现在第一零里面的数据是零,因为我们还没有向他里面写入数据。 我们看这条指令,把 m 十接通之后, mov 传送指令,把实际自速二十就会传入这个低十的存储器。我们把 m 十接通, 我们看到第一时里面的数据现在是二十,那么这个 t 一定时器他现在的计时时间就是二十乘以一千毫秒等于两秒, 我们把把 m 十二接通,我们看一下 t 一这里的计时时间是不是二十。 把 m 十二接通,我们看到这里的计时,我们看到这里的计时时间就是二十, 计时时间到达以后, t 一长开触点就接通,现在我们又把 m 十二给切断,切断了之后 t 一的时间时就会清零,因为他是一般用的定时器。我们再看一下下面这两条指令,这两条指令的作用就是按一下开关, 第一时里面的数据就会加时,按第二次第一时里面的数据再加时,再按一次再加时,那么就是我们按一下这个开关,第一的定时器就会一秒钟一秒钟的增加, 那么你按一下 m 十五的时候,这是一个减法的指令,第一十里面的数据就会减去十,每按一次都 会减十,我们现在把 m 十四给按下, 我们看到这个触点跟上面这个长开触点有点不同,这是一个上升延触点,他是指按下开关接通的一瞬间,他只接通一次, 接通了之后他会自动给断开,不会再接通第二次,等到你再按第二次的时候,这个开关也会再接通一次, 然后他自己会自动给断开。现在我们接通 m 十四,在 m 十四 接通之前,我们先要把 m 十给断开,因为在他接通的时候,这条传送指令就会一直把二十这个数传入第十里面, 如果不把这条指令给切断,那么下面这条指令他就会执行不了,第一时里面的数据一直都会是二十,把 m 十给断开, 现在我们接通 m 十四,我们注意看这个 d 十里面的数据,接通 m 十四, 数据变成了三十。 add 就是加法的指令,把十进制数十和低十里面的数字计算,然后再存回低十,就是存回他自己里面, 那么这里的是十,原来低十是二十,那么现在低十就变成了三十。上面踢一定时器,他这里的定时时间就会变成了三十乘以一百号秒, 那么我们把 m 十二接通,看一下 t 一的定时时间是不是三十, t 又开始计时,他现在的时间是三十,我们把 m 十二切断, 我们再按一次 m 十四。再按之前我们要先把它切断,因为我们刚才已经把它接通, 现在他已经断开,但是这里我们 是这里,我们是看不到他的反应,然后我们再点接通,第一时的数据就会变成四十, 现在第一时已经变成四十,然后我们再按一次断开这个开关,其实就是等于是我们手动的按钮开关按下去,他就会接通,并且处于一种锁定的状态,所以我们要按 按一次断开这个开关,他才会断开,然后我们再按一次接通这条指令就会执行, 这里的数据是五十,那么现在第一的定时时间就是五十了,那么下 下面这条指令 m 十五,它接通的是一个减法的指令,那么把低十的数据减去十进制数十 又成回他自己里面去,那么这条指令一执行低十里面的数据就会减十,就变成四十,我们可以接通 m 十五, 我们看到第一十的数据,现在是四十,把它断开再接通就变成三十,所以这两个按钮的作用就是增加第一的定时时间, 减少 t 一的定时时间,通过这两个按钮去改变 t 一定时器的一个时间值,那么这一个视频我们就 主要是了解定时器,他的计时时间值可以通过这一个低存储器来改变它,那么我们下一个视频再见。
1007知多工工控知识 07:49查看AI文稿AI文稿
07:49查看AI文稿AI文稿我们接着上一个视频,来看一下这个累计低十到低十五的计算方法。 你用到的是一个低石 v 零的变质计算器, v 零的只由下面的 inc 加一指定了改变, 当这条线路接通一次的时候, v 零里面的值会加一,接通第二次的时候, v 零的值会是二 m 二接通就是把 v 零第三十、第一十里面的数据全部清零。 第二条 m 零指令接通是把数字写入寄存器里面。 fmov, 它是一个多点传送指令, k 一五是指定传送给多少个目标原件, k 五,那么就是五个目标原件,第一十是第一个目标原件,第二个是第十一,第三个是第十二。 这条指令执行下来,就是把十这个数同时传送给第十、第十一、第十二、第十三、第十四五个姬存器。 现在低石里面的数是十,我们可以在在线监视软件件电视里面查看一下低十到低十四里面的数值, 低十到低十四的数值,从后面看上去全部都是十,是因为这条指令执行的结果。 那么我们现在注意看一下 add 加法指令在上面, ianc 指令在下面,他这里的排列是有一个顺序的, a、 d、 d, 他是加法指令。第一次运行的时候是把第三十里面的数加上第十里面的数。我们看自己的运算过程,第一次就是把第三十的数加上第十,第三十 一开始是等于零,低十是等于十,那么第一个运算过程就是第三十加十,实际是不是零加十等于十,那么这个 m 一已接通加法指令,先执行第一 三十加上低十,因为现在为零的值是等于零,所以低三十加低十,我们把 m 一给接通, 我们看一下现在第三十里面的值就是十,因为他运行的计算过程就是第三十加上第十。 因为之前 v 零里面的值是零,所以第一次运算就是低三十,加上低十, 他的计算结果是等于十,那么我们看一下现在 v 零的值是一,那么这个辫子姬存器第一 十 v 一,它的实际的值就是低十一,如果这条指令直行,就会是低三十加上低十一,就跟我们这里的劣迹穿的一样。 d 三十加十,那就是等于二十,我们要把 m 一给接通, 那么他现在的值是二十,他的计算的是第三十加上第十一,所以等于二十。 跟我们第二次计算结果,那么他的第三次计算,我们看 v 零现在是等于二,那么这里的变质计程器就是 d 十二,那么就把 d 三十加上 d 十二,然后等于三 三十,我们把 m 一却把它断开再接通等于三十。现在 v 零又等于三,电子计程器就是第十三, 那么第四次运行就是第三十,加上第十三,那么就是这一个结果等于四十, 那么第五次运行的时候就是第三十,加上第十四,结果就是五十, 那么现在他就做了五次的运算,他现在已经计算完了五次。我们注意看这个比较触点,他现在还是接通状态, 这个比较触点是小于等于,就是指 v 零里面的数小于等于五次的时候,这个触点他是一直接通。 我们现在如果把 m 一给接通,由于这一个比较触点他是接通的状态,那么后面的指令他还会执行一次,我们把 m 一给接通, 接通了以后,其实这条指令他还会执行第六次。那么他的值为什么是五十不变呢? 因为这一个低十五里面的值是零,所以他的运算结果还是五十不变。下面的 v 零,这个时候他 就是六的值,那么这个比较触点因为条件不满足,他就已经断开, 那么这个计算程序到这里就是结束。如果再去接通这个 m 一,由于这一个比较数点他已经断开,后面的程序他就不会去执行。我们注意看这里第三十 跟这个辫子寄存器相加之后,他的结果又存在这个低三十,然后又用这个低三十的值再去 跟下一次运算相加,那么他的运算的最终结果就会放在第三十里面。我们这里用的 mv 上升人触点一次一次的接通,就是 为了掩饰他这里的一个运算过程,如果我们把它修改成一个常开触点,那么他这里的程序就会自动去运行 这个上十年触电,我们改成敞开触电以后,如果我们把它接通,后面的程序它就会自动运行六次。 v 零里面的指定会是六,我们现在把它接通, 接通了以后他就会自动运行六次。因为这个触点接通了以后, plc 的每一个运算周期 inc 都会向 v 零里面加一它的数值在每个扫描周期都会进行运算,所以这一个触点 一直接通,那么他后面的程序就会一直运行到完结,那么就是这个触点的条件不成立的时候,这里的运算就完成。好的,我们这一个视频就到这里结束,感谢你的收看和支持。
436知多工工控知识




