伺服电机的齿槽效应如何解决
用过四伏的朋友应该都会有这样的经验,四伏电机运转的时候呢,速度和转距的抖动要比变频大不少,即使是空载也是如此。这在一般的位置控制模式下并不是太大的问题。但如果用四伏来做速度和扭距控制,尤其是那些对于速度和转距的精度要求比较高的场合,比如说收放转应用当中的张力控制,这个抖动的问题就显得是 突出了,因为它非常影响设备的工艺、性能和质量。那遇到这种情况该怎么办呢?最近一款名为 cnamaxs 两百的私护新品可能会给我们一些提示。尽管还没看到具体的这个技术规格啊,但从官宣当中透露出的一些信息我们可以看到,这基本上就还是一款主打性能路线的经济性。 不过呢,在这次新闻稿中倒是特别提了这么一句为了能够更好的适配一些对于速度和扭矩精度有较高要求的应用,比如说电芯组装工艺和电池制造中的收放卷应用。 s 两百提供了更为优化的速度特性和更小的速度抖动以及齿槽转距补偿功能。十七到二十一位分辨率的兵马戏场盔和同步舟 期二百五十一秒的实时已开网通信 prophenic irt。 那从这段话中我们可以看出啊,四部电机的速度和扭距的抖动其实是和电机的齿槽效应有关的。也就是由于永磁电机内部磁场的分布的不均匀,造成电机转子的旋转的时候呢,磁力线的密度在一圈里面的不同的位置会发生周期性的变化,进而导致电机输出转速和扭距的周期性的波动。 厂家给出的解决方案呢是齿槽转锯补偿。这当然是驱动器内部的一套算法,原理上应该不太复杂,就是让驱动器给电机的电流在他所需要的那个基础上再叠加一个偏置量。另外消除齿槽转锯对于电机转锯和转速的影响。 除了齿槽转机的补偿以外呢,我们看到 s 两百还配置了较高分辨率的四种反馈,并且在通讯的端口上采用了基于高速同步时钟的实时移开网通讯。这样做的目的应该是希望通过对于电机运转速度和运动控制参数更为实时、高速、精准的更新, 来提升整个运动控制系统的频响、外观和响应德行。所以呢,从 s 两百上面这些细节里面,我们或许能够得到这样一些有关于产品应用的启发。也就是,如果我们发现四部电机的速度和转距抖动过大, 影响到了设备的工艺性能,那么可以看一下这个抖动是不是由齿槽转锯所造成。如果是呢,那么就可以看一下这款私服产品当中有没有可以对齿槽转锯进行补偿的参数,有的话那么就调教一下。除此以外呢, 还需要看一下运动参数的刷新的速度和实时性,以及四服反馈的分辨率是否足够。如果不行,那可能就需要更换不同的四服产品了。

粉丝5.0万获赞15.7万
相关视频
 01:57查看AI文稿AI文稿
01:57查看AI文稿AI文稿好的朋友们,有网友提问,让说说齿槽力,那今天就这个问题一起来聊一下。 首先讲讲什么是齿槽力,他是由运动中的电机啊,齿部和磁铁之间的吸引力变化造成的推力波动,从而造成了速度的波动。 那我们来做个测试吧。把没喝完的矿泉水放在有磁铁没有电机的这个覆盖台上, 我们来清推一下这个负载台,我们看一下现在的推力波动啊。水上的波动是这样的啊,相对而言比较平稳,运动比较有规则。 这个呢,是我们装上电机的啊,有体型的电机,我们把水放在这个后台台上,我们也轻推一下,感受一下这个变化。 那我们看到了 好像有一格一格这样一个状态,这就是我们齿槽力的一个展现的一个形式。 降低这种波动的形式呢?也有几个,比如说我们体型结构上的一个变化,比如 据说我们磁铁这个斜贴,当我们速度比较快或者负载比较大的时候啊,这个速度波动也比较小。但齿套力还在。你们还了解哪些方法?评论区可以一起探讨一下。
96苏州刘工的电机 10:59查看AI文稿AI文稿
10:59查看AI文稿AI文稿大家好,现在我们开始录制视频,今天我们要介绍的内容是如何利用 maxy 二 d 对分数槽楼组的齿槽转距进行仿真和斜波分析。 嗯,那我们知道采用分数槽绕组可以降低电机的齿槽转距和转距波动,因为分数槽绕组的齿槽转距,嗯,齿槽转距的辅值通常要比整数槽绕组要小很多,这样有利于降低电机的震动和噪声。 嗯,那什么是迟早转句呢?我们来看一下迟早转句的定义。 齿槽转距是永磁电机牢组在不通电情况下,永磁体和铁芯之间相互作用产生的,转距是永磁体和电输铁芯之间相互作用的切相分量引起的。那在了解了 齿槽转距的定义以后,我们来看一下对齿槽转距的仿真需要进行哪些设置。 那第一步呢是转速设置,第二步呢是激励设置,第三步呢是网格加密设置,第四步呢是对以旋转边界进行提分,第五步是求解设置,第六步就是使淘转距波形的输出。 那我们利用嗯磁柱法一键有线缘得到 电机的二 d 模型。 接下来我们就对嗯,我们来进行第一步转速的设置,那在进行齿槽转去仿真的时候,我们需要将转速设置的足够低, 通常是只是一度每秒。那如果是分数槽老祖的话,这里我们设置成零点五度每秒。 当然如果你电脑配置足够好的话,你可以尝试设置成一点一度每秒。 然后第二步是记忆力的添加。嗯,对于 一键有线原生成的二 d 模型,通常情况下都是外电路基地,这里我们需要,嗯,我们呢也可以,我们一方面呢可以把老祖全部删除掉,那如果不删除的话呢,我们需要将外加基地改为零电,零基地电流, 那这样我们就完成了零基地电流源的添加。 然后是第三步对气息区域网格,嗯进行加密设置。通常情况下我们不 需要对此路法一键倒过来的二地模型的网格再进行网格的加密铺分设置。但是呢,齿槽转距对仿真啊齿槽转距的仿真对网格铺分的长度设置很敏感,所以我们要将气息附近的部分进行网格的加密设置, 比如瓷钢钢圈和充片。 然后是第四步对旋转边界进行气氛, 那在半的这里我们我们双击这里,然后在这里我们可以看到,嗯,下个安购这一项,我们把这个值设置的小一点,这里我们设置成零点一, 然后我们进行第五步求解的设置, 那一般情况下,我们啊仿真齿槽转距的一个周期或者两个周期,这里我们仿真一个周期,那我们需要计算出一个齿槽转距的周期。 接下来我们看一下 呀齿头转距的激波次数是怎么定义的? 转子每转一转出现的齿槽转距激波次数等于钉子槽数和级数的最小分贝数。 那在我们这个例子当中呢,它是二十四槽,二十级的分数槽,无刷电机啊,它的齿槽转距的积波次数应该是槽数二十四和级数二十的最早公倍数,也就是二十,然后一个积波的跨度应该是三百六十度,除以一百二十等于三度, 而转速我们设置的是零点五度每秒,那一个激波的周期,呃,应该这样计算, 嗯,用一个积波的跨度除以,嗯,三度除以。转速零点五度每秒,也就是六秒,那这样我们计算出来一个池槽转距的周期是六秒。 然后我们如果我们计算的是此条转距的一个周期的话,我们应该把 stop time, 也就是计算的停止时刻设置为六秒, 那计算节点呢?不应少于两百个,这样的话计算的时间不长。 top step 应该等于零点零三秒。 然后我们来设置一下下一项, 这个选项是用来设定计算时的场 场结果存储场结果存储,嗯,然后我们,嗯,在这里我们也需要给定起始时刻,终止时刻以及采样间隔。 那停止时刻我们也设置为六秒,然后采用间隔,我们设置的稍微大一点, 然后我们担心艾特出利斯特,嗯,这样我们就可以将要存储的时刻保存在这样的,嗯,右边的这样的状态栏里,然后确定,然后我们来进行一下自检。 时间,没问题,我们开始进行计算。 那这就是我们通过仿真设置得到的迟早转距的波形, 嗯,然后我们还可以通过后处理来查看齿槽转距的各斜坡的腐殖和他们的分布状况, 这就是,嗯,斜波的分布状况,嗯,这就是我们今天视频录制。
160展文电机技术服务 06:29
06:29 01:52查看AI文稿AI文稿
01:52查看AI文稿AI文稿这台四伏电机驱动器故障代码显示一二七幺零,意思是电机过载拉不动,我来检查一下什么原因, 在机器的前面液晶显示屏上可以看到是左圆点传感器或四伏电机出现故障,请检查他的意思,我就理解为 可能是四伏电机没有归零,就像一个人早晨出去干活,晚上没有回家,家里老婆着急了,报警了,咱们来看一下这个四伏电机什么样。设备里边有点乱, 大家看这个长方块里面就是四伏电机,因为怕进水所以包成这个样,上面这一个是普通电机,他们的功能是不一样的。我准备拆开这个外罩,看一下里面是什么原因造成的,我好像 发现了故障的原因,这外罩就不用拆了,在这里故障点就在这里,这个圆形的铁板挤到这里了,卡的很结实,得用点力气把它撬出来, 卡到这里对四伏电机有什么影响?往下看,把这个圆形的铁板拿掉以后啊,我觉得故障也就排除了,我先把电送上,然后再启动机器,看一下机器报警这个现现象还有没有。 好, ok 了,故障报警没了,这个四伏小电机是拉着上面这一块左右滑动的,中间这个伸缩缝就是被刚才那个原铁片给挡住了。四伏电机工作完以后要归位啊,也叫归零,回不去了,所以就报警了, 就是告诉你我拉不动了,我卡住了,快来救我。好了,现在师傅驱动正常了,我这工具箱还没打开,是不是修的有点太快了?
1.5万城阳电工电路 15:00查看AI文稿AI文稿
15:00查看AI文稿AI文稿好,接下来我们看一下这个师傅一个内部位置和内部转距,他的一些轻易涂上的编程方法。首先我们要做的第一段程序就是 触摸屏上面做一个死人啊,就是我们用一个这个单个计算器写二十一级 w 啊,就说通过摩托巴士的形式,然后控制这个师傅的死人,在触摸屏上面有一个这个死人开关。 首先这个单个计算器写的这个 k 一是我们的一个目标账号,就是我们第一个是个驱动器,他的一个通讯账号,一 啊 k 一千三,这一千三是,呃,在哪里面呢?就是他目标站所对应修改的摩托马斯地址的一个 啊,死人的一个编号,我们可以看一下,在我们的说明书上面有讲到七五杠二十啊,好像是我们的死人,那我们找到死人对应的这个 莫德瓦斯的地址,因为我们飘车这边都是实践制的方式。 k 吗?啊, 嗯,看看我们这个剩下上面所讲的这个对照表, p 五杠二十,这个死人残刷对于时间制的地址是多少?幺三零零,对吧? 说说我们天图这边,这里是幺三零零的这样一个地址,然后 k 幺六, k 幺六,他这个是十六禁止的啊,一个长数十, 嗯,就是我们 p 五杠二十啊的这个值改为十开起十的, 看我们屁股刚二十,这里正常,上面也说了啊,屁股刚二十,这里看当射电值等于十的时候,将信号设置为一直有效, 对吧?所以说我们这里写的这个啊,这个 k 幺六,他就是神游经质的十,把他收为十,然后这个只能一直有效,然后就是 是我们 prc a b 口四八五的这样一个通讯号,这就是触摸屏上面做的一个实能开关 这一段程序啊,再看一下这个时能关闭时能关闭,我们就取法吧啊, k 零这里代表什么呢?呃,就是十六禁止的零 啊,也就是我们之前上面说的这个批五杠二十啊的值等于零的时候,然后部分配套输入端子,这个,呃,也就是 关闭,死人啊,啊,这就是一个死人的开火关。首先看一下我们这个位置模式啊,一段当 这个外拧之外的时候,我们切换为外拧通的时候是转到内部位置,内部位置,首先我们得 把内部的一个正反转了,这个转距要写入一个正常值啊,防止这个从转距模式突然切换到位置模式的时候啊瘦, 以前我们转据所限制的这个数字,他出现不转的现象啊。首先我们看看这个,呃,同样是 单个计算机写二十一 w, 然后 k 一七九六代表什么呢?就是我们一个内部症状转距限制的就是 p 三杠二十八,然后我们限制多少呢?呃,我这里写的是 k 两百就是百分之两百,当然我们出场是百分之三百,这个根据自己需要来也可以设为出场值 k 二,也就是我们的 prc 这边的一个啊,串口号 ab 口的,然后再写一个,再写一组这个 k 七九七, k 七九七就是我们的一个内部反转转句的一个限制, 他对应的是我们四伏驱动器参数是 p 三杠二十九啊,然后同样写出两百的值啊,我们的一个内部位置下的一个速度,比如说你看我们这个 k 一 k 幺零零 三六,这个幺零零三六呢,就是一个内部位置下的一个速度。 p 四杠十二,对于雷公波的八十值,这个 hd 幺八,就是我们触摸屏上面啊,这个设置的 一个目标速度就是一个转速,看到没有?然后再下一个就是我们的一个位置设置,内部位置模式下的一个脉冲设置,对应的这个摩托巴斯地址呢?就是 k 幺零三四 啊。嗯,我们随便查一下这个,嗯,内部为中国私下的脉冲设置是多少呢?皮实杠十加速时间,这是一个加速,一个减速,嗯, 幺零三七,这个 k 幺零三七,他对于我们的这样一个摩托马斯地址是批四杠十三, 然后这个减速时间事故驱动器里面的一个啊,减速时间内部的,他是皮实干实事。对于摩托湾是 地址是 k 幺零三八,把我们的加减速设置进去,然后设置完以后呢, 我们要做一个启动的帆布信号,因为他是走的内部位置吗?这帆布信号我们定义是 y 一端子, y 一端子是可以自己定义啊,外输出口的,这个输出口对应到我们 事故驱动器上面的某一个,这个输入段子翻股段子配合,呃,就是批四杠三点一 啊。假如我是嗯 s i 二,那我们可能就是皮实干三点一,设置为二, 然后启动的方式,上层炎呀,常开呀,啊,启动有效就是,嗯,比如我查一下,你看 这个劈四杠,劈四杠零三点一,对吧?啊,零三点一, 这里有说设置为二,信号上升沿启动顺序执行,全部不循环,然后我们再将批四杠零四设置一下,他的有效段数设置为一段即可, 这是驱动器里面要设的皮实杠零三点一,皮实杠零四,内部转距, 同样就是我们有一个切换开关,切换端子,当外联处于墙壁的时候,我们要写入的第一部分就是我们的一个什么 内部速度,首先在限制,你看我这里限制了速度的啊,还有一个转距,转距的一个给力就是一个百分比,还有正反转转距的一个给力 内部转速限制的。呃,首先我们同样用到这个单个计算器的一个写入,写入的方式和前面讲的这个一样的,只是这个所对应的 地址不一样,比如说我专机控制时的内部正向速度限制啊, p 三杠十六, 他摩尔巴斯的地址是 k 七八四,反向的一个内部速度限制,对于我们事故驱动器的阐述是 p 三杠十七,摩托巴斯地址是 k 七八五,我们可以查一下这个对照表对不对啊?七十三杠十七,这样说 p 三杠十七, 看 p 三杠十七,我们波特巴斯对照表里面使劲就是七八五, 然后七八四是我们正向速度的一个限制,就是 p 三杠十六,这个参数对照表说明我们写的这个直接是没有错的, 转距的一个给定 k 八零幺,内部转距指定,给定,给定值为罗定,转距的一个百分比的一个指 k 八零幺,对于我们的驱动器的参数是 p 三杠三十三是吧?啊,同样我们在这个私服软件上面也可以求证的到 p 三杠三十三 一所转机啊,这一段,这一段是我们读正传转句的一个线字啊,可以起左右 k 七九六,还有一个反转转角的限制,这两个 k 七九六和 k 七九七分别对应我们啊,事故驱动器上面的这样一个啊, 地址是分别是劈三杠二十八,劈三杠二十九,这个我们一定要把地址分配对, 这就是我们正反转的一个转距的百分比的一个啊,就是说一个设置,嗯,看看我们触摸屏这边的一个这一段 转数限定啊,还有个转句设定,转句设定我们都是同样用一个 hd 六值, 然后单个计算机写的,写到对应的正传正传转句和反转转句,这个对应的奥特曼石啊,地址查出来的。 然后再一个就是,嗯,我们要读取了啊,读取的一个输出转句,输出转句 在这里 我们怎么读取来?首先第一个是得读取他的一个,嗯,当前的一个转数, 读取当前的转数是二一 g 二啊,这个直接开始,同样的是远端通讯账号,然后这个当前转数我们师傅的幽灵钢琴铃对应的摩托巴士地址是 k 四零九六,对吧?然后 我读这个个数,计算机个数为一,然后这个 本地我们接受的这个纸是迪奥零,然后读到我们的销售 ab 口账号二,创考号二啊,你看当前转数迪奥零是吧?幺零, 这里已经从作品上面写了,这就是一个读,这个就是读取当前的一个转距百分比,当前转距百分比,首先就是 对应的这个百分比,转局反馈 k 四幺零三是吧? k 四幺零三,这是由我们那个啊转局的一个百分比,对应的一个摩托巴士地址 四幺零三,在这里 他是我们的幽灵杠铃七,对吧?幽灵杠铃七就是我们那个转句反馈啊,同样的读到我们第一十四 这样一个计算器里面来,好,这个第十四呢?他只是呃当前的一个啊转局反馈的一个百分比值。然后同样我们这里要做一段,首先得将这个 第十四转角反馈的词,把它进行一个啊转成一个辅点。 首先,嗯,用到 f 二七就是一个十六位整数转伏点,就是当将我们这个第十四啊,然后这个数据转成伏点数存到这个第十六里面去, 然后传到第十年里面去了。以后呢,我们得求出这个实际的 输出转局吗?用的是当前我们所反馈的这个转局百分比 这样一个负点数值,然后乘以我们电机的机身上有个额定转距,所得到的就是我们电机直接输出的转距,这个很重要啊。然后第二是我们这里读到这个 触摸屏上面来,这个第二十,因为是伏点数,所以说我们这里要选择一个 第二的,然后这里内显示符点数值 下面的一个模式切换嘛,内部位置切换到内部转接,通过端口控制,要交接指令,触摸屏上面做了 这个转距已到达一个提示,我做了一个文字串啊,死人控制,说叉幺四控制 x 四,就是这个怎么做的呢?就是,呃,看看我们资料上面怎么说啊, 资料上面有一个叫转句限制输出,笨的,这个 就是我们可以通过 p 五杠四十二分配到输出接口 s 五几,就是比如说我想分配到 s o 二, 那就设置为零点二七五,杠四十二。我们看一下驱动器上面设的是多少?我这里设的,嗯,端子啊,七五。
 00:32查看AI文稿AI文稿
00:32查看AI文稿AI文稿四、伏电机常见的十大故障,你遇到了几个?一、编码器报警。二、电机运行时响声不正常,有异响。三、运行中电机振动 较大。四、电机通电后不能转动,但是没有异响,也没有异味,也没有冒烟。五、通电后电机不转,有嗡嗡声。六、电机过热,甚至冒烟。七、轴承过热。 八、电机启动困难。额定负载时电机转速低于额定转速较多。九、电机断轴。十、电机空载电流不平衡。三项相差大,你遇见过几个?评论区聊聊!
374律为科技工控集市 07:06查看AI文稿AI文稿
07:06查看AI文稿AI文稿大家好,我是微电课堂的赵老师啊,这节课呢,给大家讲一下这个四伏电机啊,在使用过程中,他为什么转不起来啊,有几个原因啊,让他转不起来的,今天就给大家着重讲一下这个啊, 又有不少的这个学员呢,在学习过程中呢,就是他有脉冲信号啊,有脉冲信号呢,是吧,电机也上电了,也使能了,但是他依然不转,经常遇到这样的问题啊, 所以说呢,今天就给大家讲一下这个四伏电机转不起来的几个主要原因啊,当然还有两个不常见的原因啊,首先呢,咱们这个四伏电机是吧,要想转起来啊,第一个原因呢就是啊,比如说没有上电啊, 是吧,所有的那所有的电器,他工作必须有电是吧?第一条是没有上电,第二个呢叫做使能 啊,这一条呢就是说啊,犯错误的非常多啊,有好多学员不知道伺候电机是需要使能的, 他和变频器不同,变频器呢,你两个端子接到一块是吧,他就能转,但是四合电机呢,他需要使能信号,先给使能信号,然后再给运行信号,这样他才能转啊,使能啊,不要忘了啊。然后啊, 还有一个呢,叫做脉冲信号啊,脉冲信号,这个脉冲信号呢,分两部分一,一个是没有给脉冲信号 啊,一个是没有给,一个是给的少, 给的少。你发了一个脉冲,对于四合电机来说,那就像挠痒痒一样,根本就没有反应,所以说你要给足够的量啊,你比如说 pic 编成的时候,给脉冲信号要给足够的量。 第四个呢,就是这个脉冲,就是这个电子齿轮笔 啊,这个电子球比,这划重点啊, 啊,换一个终点啊,这个电子齿轮比,这个,因为这个啊, 就是这个怀疑电机不赚的啊,非常多啊,主要原因就是这个,我脉冲也给了,给的也不少,是吧?给的也挺多的,大几千脉冲上万是吧?但是四合电机就是不转是吧?也使能了是吧?就是说他不转,怎么回事呢?就是因为电子齿轮比啊, 这个电子齿轮笔是怎么回事呢?一般的话,这个电子齿轮笔这个出厂的时候,这个四伏电机设置的是一千 这样的一比一千啊,分母是一千,分子是一,或者是分子是十啊,这种状态下呢,是什么意思呢?就是说你发一千个脉冲啊,四伏电机呢,才旋转 这个十个角度啊,才旋转十个角度。你如果这个四伏电机的编码器呢?是三百六十份 啊,比如说是转一圈三百六十分是吧?那他才旋转十度啊,你有时候呢,就是说,但是他远远不止三百六十分,他有可能是三万六千分,是吧? 那你他赚,赚这个你,你给一千个外充,他才赚十份,是吧?那个电机呢,其实也赚了,但是赚的特别的,你根本 看不出来是吧?他转了一个特别小的角度啊,四转不转的就是你,你根本就看不出来,他必须得转过一定的角度,你才能发现,是吧?他其实转了,但是角度特别小,你也发现不了啊, 所以说咱们要怎么怎么弄呢?才能发现他转呢,是吧?一定要把这个电子球笔给他改一下啊,把下边把分母改成一把,上边这个分子呢,你给他调大, 比如说变成一千比一是吧?这样呢,就是说你这边动一点,他上面动很多啊,你给一点这脉冲,他就动的角度很大,这样你就能看到他转了,否则你是看不到的。 然后第五个,第五个,四伏电金不赚的原因,这个原因呢,是不太常见 啊,叫做这个啊,电压低啊,脉冲电压过低 啊,叫做外充电压低啊,我这这么长时间的工作,十几年的工作经验里边就发现过一次啊, 大部分的情况下呢,前四个是吧,就都能搞定,都能都能转啊,是正常的是吧?唯独这第五个啊,这个电压低就发现过一次啊,怎么意思呢?就是说咱们给这个四伏电机的脉冲信号,他也是电, 虽然是弱点,但是他也是有电压的啊,比如正常的情况下是五伏是吧,如果电压低, 他就会不转啊,你比如说这到了三伏了是吧?比如到三伏电压很低了,电压太低了,以后不足以让这个四火电机啊运行啊, 虽然你用那个万用表测量了,他也有电是吧,他也有电,只是电压低,他也会转不起来啊。所以说呢, 这个呢,就是说啊,几乎就是四伏电机不转的啊,大部分原因了啊,当然还有小部分的,比如说线位开关什么的。那个呢,就是容易发现啊, 尤其是哪不还不容易发现呢?就是从啊,第二第三,最最重要的就是四和五这两条是极难发现的是吧,非常不容易发现。这个四呢,就是说啊,一般有 经验的老老工程师他绝对能发现,因为他他的经历过。前三个是吧?到第四个了是吧?但是那个脉冲电压低,这个呢?也不是一般啊,得非常丰富经验的老工程师他才能见过这种情况啊,一般情况下他根本见不到这种情况,是吧? 那么有想系统学习自动化的学员呢,可以私信我啊,这就可以讲到这里,谢谢大家。
979微电赵老师PLC 00:27查看AI文稿AI文稿
00:27查看AI文稿AI文稿师傅电机线这样抖动该怎么办?我们分以下三种情况处理,第三点最重要,记得点赞关注。第一点,当师傅电机使能后来回震动,我们就调到,调到他的光亮。 第二点,在师傅电机中运行过程中遇到震动,我们就把他的刚性调小。第三点,当师傅电机启动时震动,我们就去调位置,缓速度、缓滤波时间就。
2724普菲德伺服电机 03:00查看AI文稿AI文稿
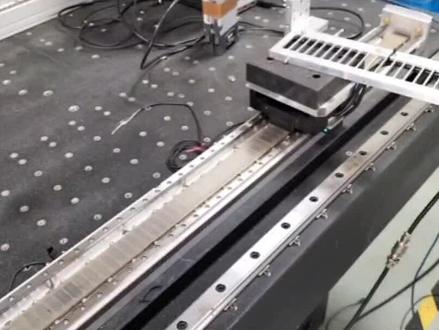
03:00查看AI文稿AI文稿这就是一个 smt 设备啊,垂直安装的轴,这个垂直安装的轴带动在这个丝杆上面带动这一个框呃上下活动。现在的故障问题呢,就是 当我们机器回开机正常回原点的时候,回原点的时候呢,这个马,这个马达的私服驱动器报警石榴过载了,那么我们在前面的视频当中呢,也说过了过载的几个办法,几个故障现象,几个原因。 四伏驱动器本身马达,还有就是这个呃电源的马达的这个线,这根线呢?这根线啊,这根线是从呃这个这个线他有两组线,一组是编码器,这组接的是编码器,这一组接的是四伏电机, 四伏电机到驱动器的到驱动器的线啊,特别是这个四伏驱动器的线有没有断线,如果有断线的话呢,他也会报载,也会报警过载。 那么我们在处理故障的时候呢?呃遵循遵循的一个原则,什么原则呢?就是先简单后复杂。那么现在我手上呢没有好的四风驱,四那个四风驱动器来更换,也没有换,也没有这个马达来换,那么我们首先检查这根线, 就是私服驱动器的那个控制线,没有断的,这根线没有问题,然后他这个电,这个电机呢,这个马达呢就是带刹车的, 如果我们的电机他不带刹车的话,那么你突你带不带刹车的话呢?你突然断电之后,那么这个他不带刹车,突然断电,那么这个框,这个框就有可能压到最底部去,压到最下面去 防止这个呢,所以按这个电机呢是带有刹车的,那么如果这个电机带有刹车的话呢,他这有一组这个线,这一根线被我拿掉的这根线 就是私服刹车的控制线,他控制的方法呢也很简单,也就是给这根线的这个接口提供一个二十四伏的电压,让私服刹车,把它让那个私服这个电机把刹车打开,然后他能够顺畅活动。 如果这个地方缺少一个二十四伏,缺少二十四伏,那么四伏刹车就会把它抱的很紧,抱的很紧的话呢,就是他该要运动的时候,想上动的时候,因为他抱的很紧,他动不了,动不了的话呢,他就会报警过载。那么现在我确定呢,就是这一个 这个这个接口上面他没有二十四伏。那么我们在查了机器的电路图之后呢,这个二十四伏的控制点在哪个地方?我在电源箱的接口上面也可以,我看 你知道,现在呢,我想不麻烦,我就直接给这一个,给这个电,给这根线提供一个二十四伏电源,让他直接供电。 那么我提供的这个二十四伏电源他有一个要求,也就是说当我的机器断电的时候,这个二十四伏的电源也会要断掉。如 如果不是的话呢,就是如果你关机了,这边的二十四伏还有的话,那么他还会使这个电机也报不起这个轴,他还会往下降,所以现在我确定就是这个二十四伏供电有问题,我需要给他提。
2281206yg 01:42查看AI文稿AI文稿
01:42查看AI文稿AI文稿一、电机编码器报警一、故障原因一、机械错误二、电池干扰三、机械震动导致的编码器硬件损害四、现场环境导致的污染。二、无常排除一、检查接线并排出数据。二、检查屏蔽是否到位,检查路线是否合理并解决。 六、十、增加预播器,加以改善。三、检查机械结构,并加以表情。四、检查编码器内部是否受到污染、腐蚀等成油等,加强防护。 三、编码器安装及机械标准一、尽量使用原装电缆。三、通离电缆,使其尽量远离干扰线板,如电源电缆、大功率电缆及高噪音电缆等。 最好使用屏蔽良好的金属电脑管套。三、尽可能使用电源。如果使用开关电源,则应使用于过期,确保电源达到接近等级。四、使中央公共关节点。五、将编码器外壳与机器结构保持均匀,并连接到 电缆屏蔽层。六、如果无法使编码齐绝原则可将电缆屏蔽层连接到编码器外壳和驱动器框架上的接地或专用关子。二、电机断折一不找。原因一、机械设计不合理,导致颈下负载并够大。二、负载端卡死或者严重的瞬间落枕。三、电机和减速机装配时更新。 二、故障排除一、核对电机样物中可增设的最大景象通载力,改进机械设计。二、检查复杂规的运行情况,确认实际的工艺要求并加以改进。三、检查复载运行是否稳定,是否存在震动,并加以改进机械装备精度。三、电机通载电流离合三向相差大 一不讲。原因一、老总手尾端接错二、电源电压不平衡。三、老总存在拆迁短路、线圈反间等故障。二、不想排除一、检查零纠正。二、测量电源电压,司法消除不平衡。三、消除老主故障。
 01:51查看AI文稿AI文稿
01:51查看AI文稿AI文稿如何使用湿敷电机?越简单越好,这是一句废话吗?把简单问题搞复杂的大有人在,我只讲一招致命的方法。来,各位叔叔阿姨们给我点个赞,并下载保存,反复学习。 一、师傅,电机控制接头不要焊一堆线,只取三个信号,一个脉冲,一个方向,有必要时加一个报警。 其他什么死人信号,左极限、右极限及其他信号通通屏蔽了,少即是多,多即是少。 二、别说不进电机容易丢布,湿敷电机发脉冲容易受干扰,这样的话那是你不会用,在正常使用的环境下,不进电机不会丢布。湿敷电机脉冲不会受干扰,不进电机丢布是你选型没有选好。扭力不够, 电压供电不足,转速超过六百转,电流拨码没有拨对。师傅,电机受干扰是机台没有接地发脉冲没有用双脚屏蔽线还可能 p。 二十一,程序不会编程, 你说你干了三十年不可能不会,偏要去编程,我看看你编的程序连回原点都没有写对,还在依老卖老。三条参数,不要相信什么字整定,什么叫自动整定,就是每一个光棍发 他一个老婆按需分配,众口难调,自整定设备螺丝都给你震掉了,刚性都没有整定好。刚性调参数口诀, 先调冠量参数,再调速度增益,再调未知争议,再调力波参数。四、定期选型没有选对,调什么参数都没有用,懂选型比懂 调仓数更重要。来关注我,我告诉你一个万能四伏电机水行公式,小哥哥小姐姐们,你不关注我,我就不告诉你哦!
2.5万黄校长自动化批发 05:18查看AI文稿AI文稿
05:18查看AI文稿AI文稿大家好啊,我是自动化韩国啊,欢迎收看本期课程。那这节呢,我们讲一下啊,什么情况下要设置这个电子齿轮笔啊,就说在似乎驱动器的参数中啊,有两个选项,一个是电子齿轮笔,一个呢是设置没转脉冲数啊, 电子齿轮笔和没转脉冲数两种模式。那么通常情况下呢,我设置电子齿轮笔也可以啊,然后设置没转脉冲数也是可以的啊,就说这两种啊,你设置哪种?似乎电机都能运动啊,运动,但是呢,我们为什么要设置电子齿轮笔啊?为什么 电子尺笔设置呢?是为了让我们的脉冲数和行走的距离啊,有一个对应关系啊,这个关系呢,就说是我们自己来定的啊,比如说我们 想让一个脉冲走零点零一毫米,那么我们就可以用电子池笔把它转化出来啊,就说上危机发送一个脉冲啊,那么四伏电机驱动四杠啊,或者其他机构就走零点零一毫米啊, 这种情况下啊,然后我们就可以设置电子尺笔,如果我们设置的是没转脉冲数,没转脉冲数啊,比如说我们设置一万个脉冲是一圈啊,一万个脉冲, 那这种情况下呢,我们势必要根据四杠的导成,还有减速比等等啊,换,还是要换算出来,你一个脉冲走多少毫米,这时候肯定 不是零点零零零一毫米或零点一,而是零点零三二五。比如说啊,那么你需要换算啊,换算完之后呢,你需要把这 个脉冲啊换算成距离,如果说你想设定距离的时候呢,再反过来把距离换算成脉冲啊,这是互相转换的,那么哪种情况下建议设置电电子尺儿笔呢? 就说你的偏西啊,没有这个,呃,偏西软件没有这个电子群比 这个是选项的时候啊,就说有的偏西呢,什么意思?有的偏西啊,他本身他具有电子池。比这个,呃, 选项啊,就说他可以根据你天的参数自动计算出位置啊,自动计算出位置,比如说我们的 q 系列, fs, 五优系列等等啊等等都可以,或者是西门子的呃,二百 spmat 幺二零零啊这些,那这些呢,你 就可以不用换算电子尺儿笔了,你只要写没转脉冲竖就可以了。没转脉冲竖啊,比如说我们 qq 系列添加一个 qd 七五模块啊,添加一个 qd 七五模块 之后呢,在他的参数中啊,我们就可以设置这个。每转脉冲数啊,是多少啊? 设置没转脉冲数是多少,那这种情况下,我们在驱动器中就可以不需要设置这个,呃,没转 呃,电子锤笔,而只设置没转脉冲数就好了啊,大家看 qd 七五这里啊,有一个没转脉冲数的选项啊,没转脉冲数,这个只要和四伏电机设置成一致就可以了。设置成一致啊, 那如果说我单位设置成毫米,那没转脉冲数呢?设置成一万啊,一万啊,然后呢,没转的移动量指的是四杠的导成 啊,就是你去掉这个呃,换算成减速笔之后,四伏电机转一圈走多少毫米啊,走多少毫米啊,比如说五毫米,那么是五千啊,五千个面就可以了。 然后呢,他会自动把地址数据啊存到一个缓冲存储器中,然后我们就直接读出地址数据了,而不需要计算啊,这种是可以用没转脉冲数的啊。那假如说你用 f s 三 u 二 n es 这种模式啊,那因为他本身呢不具备这种 呃选项,就说你天蝎没准脉冲数什么他只能通过第八三四零呢来这个数据呢,存储当前发送的脉冲数,所以呢我们就可以设置电子尺儿笔,然后呢用电子尺儿笔来表示距离,然后我用脉冲数来 表示距离啊,我们设电子尺儿笔的目的呢就是用脉冲数来表示距离的,和距离的有一个一对呃,一百比一或者十比一或者一千比一的关系啊。所以呢,我们在这种情况下就要设置电子尺儿笔的 啊,那么 fx 五优啊,也可以不设置啊不设置啊,那西门子的那现在来看二百四骂他幺二零零啊,都可以不设置啊。欧姆龙的呢是需要设置的啊,需要设置 cpa 是,比如说他存储的也是脉冲啊, 深处也是脉冲,那么这个脉冲呢就是我们就可以直接把脉冲啊拿过来当成距离来使用啊使用,所以这种情况是需要设置电子尺笔的啊。就总结一句话,当你的偏西在程序中无法设 设置没转脉冲数的时候,那你就设置电子尺儿笔,当你的程序中可以设置没转脉冲数啊,磁亢导程等等一系列参数的时候,那你就可以设置没转脉冲数啊,没转脉冲数啊,希望我的建议对你有所帮助啊啊,今天课就讲这些,谢谢大家。
526自动化韩工


