arduino智能小车米思齐教程

粉丝771获赞2101
相关视频
 09:31查看AI文稿AI文稿
09:31查看AI文稿AI文稿大家好,今天我们来学习点正品,这里有两种点正品,这种是不带驱动芯片的,他总共有十六个银角,我们要去控制他的话,就需要用到十六个控制银角, 这种是带七二幺九驱动芯片的点正屏,我们要去控制它的话,只需要用到三个控制眼角就可以了,这样就可以节省控制眼角的数量。 接下来我们来学习点正品的显示原理,这是一个八乘八的点正品, 这圆点总共有八行八列,每一个圆点对应一个 led 灯,也就是说这个 点正瓶总共有六十四个 led 灯,我们把有字的这一面面向我们点正瓶的两排银角,是这样逆时针进行编号的。 点正品有供应级和供阳级之分,供应级的点正品内部的 led 是采用这种连接方式,而供阳级的点正品内部的 led 是采用这种连接方式。 我们来看这种供应级的点正平,如果我们想让这个灯点亮,对应着原地图就是这个灯, 我们只需要在他所在的列给一个高点品所在的行给一个低点品,那么就可以让这个灯点亮, 对应着这边我们需要让十三、十三号管角,十六、十五、十四、十三也是这个银角给他一个高点皮,然后在九号 银角给他一个的电瓶也是这个银角,这样的话就可以让这个灯点亮。同理,如果我们想让这个灯点亮的话,我们只需要在他所在的列 一个高电瓶所在的行和一个低电瓶,这样我们就可以让这个灯点亮了。 如果我们想让这两个灯同时点亮,那我们是不是同时给十三号管角和三号管角一个高电瓶,给九号 和十四号管角一个低电瓶,就可以让这两个灯点亮了,答案是不行的, 因为这样的话这两个灯也会点亮,也就是说我们不能只让这两个灯亮,而让这两个灯不亮。那怎么办呢?我们就需要利用人的视觉战略和现象, 也就是说先让这个灯点亮,然后让这个灯熄灭,熄灭了之后马上让这个灯点亮, 这个灯点亮之后,然后熄灭之后马上又让这个灯点亮。由于这两个灯亮灭的间隔时间很短, 这样我们人 看起来就好像这两个灯是同时点亮的,这样我们就可以让这个点正屏显示任意的内容了。 接下来我们来看这种带七二幺九点正瓶的银角。第一,首先我们来看这两个银角是电源的正负极,然后第一是 spi 通信的 数据银奖,然后 cs 是片片银奖,然后 clk 是始终银奖。 当我们觉得一块点正平显示内容太少了的话,我们可以在这边给他再集连多个点正平, 这两个是电源的正负极。然后第二次接下一个点正 的地域银角, 然后 c s, 接下一个点正品的 c s, 然后 c o k, 接下一个点正品的 c o k, 这样我们就可以今天出多个点正评,从而显示更多的内容。接下来我们来编写一块点正评的控制程序,这个是连线图, 首先我们需要对点正频进行初始画,在显示器这个栏找到点正频,然后 使用这个初始化模块设置点正品的三个控制银角,这里默认就行了。然后设置点正品的 水平点正数和数值点正数,由于这里只有一个模块,这里两个设置为一,然后对点正平进行清屏操作,这里设置为全面。 接下来我们使用这个模块来控制点正瓶的六十四个 led 灯,这里六十四个小方块对应着点正瓶的六十四个 led 灯。如果我们想让点正瓶的第一行点亮,我们这里把第一行选中就可以了。 上传程序之后,我们发现 这点正品它不是第一行点亮,而是第一列点亮,这样的话我们就需要旋转一下点正品的显示方位, 注意这里需要把这个序号改为零,因为这点正频他是从零开始编号的,然后这里设置为九十度, 这样点正品的显示方位和这里的显示方位就对应上了。 如果我们嫌这样去点比较麻烦的话,我们可以使用这个软件预设好的图案, 这里有很多种图案,我们可以自己去选择。 接下来我们进行多块点针屏及连程序的编写,这个是连线图,同样我们需要对这个点针屏进行促使化, 这控制银角不变,然后我们只需要把这个水平点成数改为二就可以了。然后需要去旋转这个点成平, 第一块和第二块点正平,对外旋转九十度, 然后 对点正品进行清屏操作。 接下来我们就可以通过这模块去分别控制两块点正平,首先我们来控制第一块点正平, 让他的第一行显示, 紧接着我们来控制 第二块点成平,只要你注意要将这个数字的名字改一下, 然后上传, 这样我们就可以去分别控制两块 led 屏了。当然我们也可以通过这个模块 让点正屏滚动显示遗传字符,这里是设置速度,这个是设置显示内容, 这个速度越小他滚的速度越快。
1925iMaker 04:20查看AI文稿AI文稿
04:20查看AI文稿AI文稿实验室舵机出动零一工坊文老师主讲 本实验的硬件接线很简单,舵机自带三条线,中间的红色线连接主板五伏接口,黑色或灰色的线连接主板, gnd 接口,绿色或黄色线连接主板的数字接口九、主板五伏接口用于设备供电, gmd 接口作为负极连接,而程序通过数字接口九对舵机进行控制。舵机是我们学习的第一个会动的设备,大部分舵机可以旋转一百八十度, 部分可以旋转三百六十度。在实际生活中,摄像头、智能小车都可以使用到。舵机设备虽然简单,但是第一次让我们接触到可以运动的设备,感觉离智能化机器人 的理念进了一大步。程序主要逻辑如下,一、对舵机进行初始化,指定主板接口九二、使用递增循环,从零度开始,让舵机一点点旋转到一百八十度。三、使用递减循环,从一百八十度开始, 让舵机一点点旋转回零度,舵机旋转的原点没有变化,会看到舵机在零到一百八十度来回转动。我们联想一下生活的场景,家里的摄像头要根据用户需要转动, 已查看不同的位置的实时图像,在手机中发出指令就可以让摄像头转动,相当于我们在米斯奇工具中发送指令让舵机转动,其工作原理是相同的。作为第一个会动的设备,为儿读 eno 编程提供了广泛的空间。 本实验使用的设备是一个小型的舵机,由三根线延伸出来,用红色跳线连接舵机,红色线。用橙色跳线连接舵机,橙色线用黑色跳线连接舵机黑色线, 红色跳线连接主板五伏接口,橙色跳线连接主板数字九接口,黑色跳线连接主板 g、 n、 d 接口。 硬件接线完毕, 开始电脑端编程,从控制分类中拖出初始化控件,从执行期 电机分类中拖出 server 舵机控件, 对舵机进行初始化。指定管角为九,脉冲时长为默认的一千五百。 配置主程序逻辑,拖入递增空间,递增变量命名为 pos, 其实数值设置为零,终点数值设置为一百七十九,不长为一。 在递增的代码执行区,拖入舵机转动空键,拐角修改为九角度,引用 pos 变量延时配置为十五毫秒, 复制递增控键,调整参数变成递减逻辑,其实数值设置为一百八十,终点数值设置为一,不 常为负。一。 检查代码,如果没有问题,就点编译编译,如果没有发现异常,可以接上主板 usb 线,将代码上传到主板中。 实验效果如上舵击有规律地按零到一百八十度旋转。 实验总结,本结结合课程内容,陪伴着朋友们一起学习舵机出动实验,学习硬件接线。米思奇编程代码上传执行, 让大家可以更加了解耳朵 inno 电子原型的相关操作,提升了思维能力,动手能力。
274零一工坊 04:19查看AI文稿AI文稿
04:19查看AI文稿AI文稿实验一, led 闪烁由零一工坊文老师主讲, 使用的器材有四种,除了主板,还有 led 灯,两百二十欧姆电组,两根跳线和面包板。接线的关键点是 led 的正负极。 led 有两个角,长的是正极,短的是负极。 led 正极与电阻连接在一起,用红色跳线连接电阻和数字接口时,用黑色跳线连接 led 负极和主板,直沿 d 管角。主板数字管角时能输出零伏或五伏的电压,输出电流为四十毫安。 但是普通的 led 需要二伏的电压和三十五毫安左右的电流,这就需要一个电阻帮助 led 阻挡一下,将电压从五伏降到二伏,将电流从四十毫 毫安减到三十五毫安。如果不接电阻,被立地灯将很快烧掉。用方口 usb 线将 arduino 主板与电脑连接,一方面可以让电脑供电,另一方面用来做数据和指令传输。如果实验的成品需要独立运行,可以用 d c 插头进行供电, 连接四个串联的五号电池或一个九伏方块电池。然后我们复习一下耳朵 inno 的代码结构,包含初始化和循环执行两部分, 我们主要是配置循环执行区的代码,米思琪工具会自动帮我们生成初始化代码。使用米思琪工具进行代码编程, 主要逻辑也比较简单,一、设置数字管角时为高电屏,让 led 灯亮起来。二、延时一千毫秒及一秒。三、设置数字管角时为低电屏, 让 led 熄灭。四、延时一千毫秒及一秒。上述内容为循环区代码,初始化代码将被自动生成,代码编写完成后上传到主板就可以了。 首先我们检查一下设备,分别是四百口面包板一个, led 灯一个,为了更好接线,稍稍弯曲其长角两百二十欧姆电阻一个,跳线两根,橙色的接正极,黑色的接负极 arduino 主板一个。 一、将 led 灯接到面包板上面,接入时要注意跟中间凹槽平行,不能垂直,否则将短路。二、用二二零欧姆电阻连接 led 灯正极可以稍微弯曲一下电阻的接线,接入时不能跳到中间凹槽的另一 边。三、用橙色跳线连接电阻和主板的数字管角时,跳线与电阻应该在垂直方面的接口相连。四、用黑色的跳线连接 led 负极和主板直沿 d 管角,同理,跳线与 led 负极应该在垂直方面的接口相连。 电脑打开米思奇编程工具一,在工具左侧找到输入输出分类,点击选择数字输出空键,该空键进入中间代码区。在工具左侧找到控制分类,找到岩石组件,拖入中间代码区,并与之前的空键拼接。二、 选定数字输出控键快速复制一个,选定延时控键快速复制一个。三、配置,第一个数字输出管角时为高电频,第二个数字 输出管角时为低电瓶。 代码配置完毕后,点击上传按钮,将代码上传到主板中。 主板接收到代码后,将按照相关指令执行,让 led 灯点亮一秒,然后再熄灭一秒,效果如上所示。 实验总结,本节结合教程内容,陪伴着朋友们一起学习 led 闪烁实验,学习硬件接线米思琪编程代码上传执行,让大家可以更加了解耳 do inno 电子原型的相关操作,提升了动手能力。
141零一工坊 02:05查看AI文稿AI文稿
02:05查看AI文稿AI文稿首先我们在百度搜索 mix 零,然后点击进入 mix 零官网, 然后点击软件平台,选择密克斯林官方版,然后根据自己的操作系统选择对应的安装包, 这里以 windos 系统为例,进入 windows 安装包下载页面后,我们点击下载链接一进行下载即可。下载完成后,我们得到的是一个压缩包,然后解压, 打开解压后的文件夹,打开一键更新工具, 然后选择安装功能,初学者直接输入,嗯,不安装即可,后面不需要操作,等电脑自己安装完成显示,请按任意键继续代表安装完成, 然后我们回到刚才的文件夹,找到 mix 零点,一叉一可执行文件打开, 打开后我们看到的就是这样一个界面,这个就是 mix 里软件操作界面了,我们就可以在这里编写程序,如果我们要将 编写好的程序上传到控制板中,我们还需要安装创口驱动, 驱动程序我已经放到视频剪辑中,有需要的小伙伴可以自行下载。 下载完成后,我们得到的是这样一个文件,然后打开这个文件,点击安装就行了。
5465iMaker 02:27查看AI文稿AI文稿
02:27查看AI文稿AI文稿打开米斯奇编程软件,点击 are you inno avr 类型项目,此时界面右上角显示主板的型号和 com 端口保存当前新建项目到自定义的实验目录。为了测试主板与电脑是否连接成功, 我们准备编写一段非常简单的代码。文老师先简单介绍一下代码结构。耳朵 inno 的代码分为两部分及初始化部分和循环执行部分。 一般而言,米思琪会自动帮大家生成初始化部分,我们只需要编写循环执行部分。本视力中循环执行部分内容为打印和 low 和延迟两秒。延迟动作是为了让循环的节奏慢一点, 不至于快速无限执行。我们在编程工具中执行相关逻辑。从左侧图形化编程区的串口分类找到打 印空键,并可以实现自动换行。在文本分类中找到字符串空键拼接到打印空键的后面,其含义是使用串口打印和 low 字符。 然后从控制分类拖入延时控件,该控件的时间单位是毫秒。在这里解析一下,毫秒是时间单位,一千毫秒等于一秒, 我们配置延时两千毫秒,也就是两秒。配置完成后,点击左上角的上传按钮,将代码上传到二读一弄主板中。代码编程和上传的时候,要保证主板与电脑一直连接, 在这里文老师给大家讲解一下原理。我们用米思琪工具编写的代码通过上传按钮上传到主板中。上传前,程序在电脑端进行编译,变成相对小的文件通过串口线稍录进主板, 主板的 r x 和 t x 串口指示灯会不断闪烁。代码上传成功后,主板将独立运行,相关代码 运行的内容就是刚才的每两秒打印一次 hello, 打印出来的信息可以在电脑端的串口监视器查看,这个也是非常常见的代码调试方式。此时我们观察 r 读 eno 主板,发现每隔两秒主板的 rx 指示灯在闪烁, 表示主板通过串口再发送信号。实验是成功的,已经完成主板与电脑的通讯。基于 mix 里的耳朵 inno 入门教程,配套器材已上架,有四大优势,办学视频由资深专家整理, 图形化编程步骤完整,设备完整。三十多种设备一次购买做完十五个实验,是您学习 are reno 的好帮手。
169零一工坊文老师 04:57查看AI文稿AI文稿
04:57查看AI文稿AI文稿哈喽,各位家长们或者小伙伴们,给你们大概的讲一下我们目前用到的两个设计的代码解析。首先我们用的是米斯奇的这个逻辑代码的编程, 那么如果说没有接触过这个的,首先你可以看一下,他是一个图形化编程软件,如果接触过图形化变成软件的会对他很熟悉,如果没有接触过的话,我们啊丢脑的银角,你可以看任何一个丢脑的食物图, 他会有对应的数字编号引角。我们上一个设计的实验是通过不同的灯的闪烁,那么 led 灯他为什么可以实现闪烁?首先我们需要了解的是一个特性,就是关于 led 灯的一个特性, 那么 led 灯说白了我们在前面的视频当中有讲 aled 灯,它由一个长角一个短角所构成的, 长的代表着正极,短的代表着负极,那么什么条件下灯才会亮?这个知识可以讲一下, 就是说白了你是不是点电源,这边你给一个正极,给一个负极的一个 dc 直流电源,就是说白了你的电池正极负极接上去之后,那么你的灯是不是才会发光?这是一个常识性的问题,这应该知道吧, 这个应该相对而言比较简单一点,就你才会发光,那么在正极在我们的代码当中代表的是一,也就是说他所谓的正极叫什么?叫高电瓶,叫做正极, 那么如果说低电瓶,低电瓶代表的什么?低电瓶代表的是零,那么低电瓶他在代码当中是闹,是不是就闹一个是害, 一个是高电瓶,一个是低电瓶,那么这样就很容易理解着,我们现在再来看代码, 我们看代码是不是?如果说你的电路怎么接的?我们在我们电路食物上面是不是这样接的?我们的电路食物是不是这样接的? 我们正极是不是串了一个一 k 的电阻,就串了一个色环电阻,你不管多大,因为怕电压太大了,串了电阻之后这边才能接五十的,那么你负极这边是什么? 你户籍这边他是不是就直接就是接到我们的啊?啊 do not 的那个 l 口了,就是银角了,那么什么条件下会亮?现在我们正极已经 有了,那么什么条件下灯才会亮起?是不是你这边得是一个低电瓶,就你这边得是一个负,得是一个闹才会亮起?是不是? 那么在代码编程,李斯奇图形化编程的时候,是不是我控制对应的银角,它输出低电瓶的信号,二三四五四个灯输出低电瓶信号,你可以看一下,在代码这边我现在至二三四五为输出,在代码这边我是不是都是闹为低电瓶?看到没有? 全部都是低电瓶,那么全部都是低电瓶之后延时,延时多长时间?一千毫秒,当然延时时间我可以调整。 延时一千毫秒之后是不是在变为高电瓶?我们说了亮灯条件必须得是一个正道一个负,如果我这边也变成高电瓶了,那么是不是就不构成回路 灯就不会亮起,灯就不会亮起这个常识,那么这个时候灯就会灭掉,然后再延时一千毫秒,再反复的直行灯亮起来,那么最后实现的效果是什么?就是高低高低高低,也就是最后实现我们实物当中的一个灯闪烁的一个效果, 那么是不是这一节课就这个代码主要讲的是什么?讲的说白了是不是还是通过高低电瓶的变化来实现灯的一个闪烁的变化, 这个应该明白吧?如果明白这个的就是你大概的这个环节,这一趴基本上你全部都知道了,也就是这个功能。那么灯 我们在实验现象当中你自己也可以搭建了。我这边正极我串了一个色环电阻,防止灯烧掉,我在这边接一个五伏的电源, 在我丢到板子上面,这边我直接接一个负极,那么灯就会亮起。灯负极我是直接接到 l 的 l 口的,如果 l 口给高电瓶,则不构成回路灯不会亮起。如果 l 口给低电瓶 就给闹,那么他这个时候是不是就亮起来了?那么最终实现灯亮的效果。如果说我在代码中米斯奇图形画边,图形画边成,我加一个岩石,最终实现的效果是不是就是灯一闪一闪的?那么实现我们闪烁灯的一个效果是这个代码实现的就是闪烁灯的效果,这个是不是闪烁灯的一个效果? 高低电瓶的一个变化,很直白,很直观。然后我们可以结合我们上一条视频看一下实验现象,这个代码就很清楚了。好的。
33创客王老师 00:59查看AI文稿AI文稿
00:59查看AI文稿AI文稿大家好,上一段视频为大家介绍了阿堆诺编成的四大步骤,本次视频看下如何快速开始编写阿堆诺程序。 我这里使用的工具是一款免费的图形化编程工具,叫米字西。我们快速录入一段程序,点击这里的打开, 系统已经内置了一些粒的程序,我们选择第一个程序,打开后看一下它的功能。这是一个闪灯程序,可以控制电路板上的 led 进行闪烁, 点亮一秒钟,然后熄灭一秒钟。修改这里的岩石,我们可以改变 led 闪烁的间隔 程序循环往复,直到切断电源。通过这个小程序,我们发现使用途经化的方式入门耳堆能编程并不是一件很困难的事情。 有关于程序的问题,大家可以在屏幕下方留言,在下一段视频中为大家演示如何编译下载程序。本次就为大家分享这么多内容,做个创客并不困难,我们可以从啊对弄编程开始。
989创客大王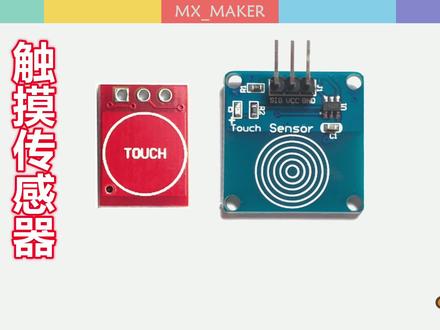 06:42查看AI文稿AI文稿
06:42查看AI文稿AI文稿大家好,这节课我们来学习触摸传感器, 最常见的触摸传感器有这两种,他们的功能和使用方法都是差不多的,都有三个银角,分别为电源的正负极加一个信号银角。 实际上触摸传感器它的功能相当于一个按键,我们可以直接用手去触摸这个触摸传感器,我们也可 可以把这个触摸传感器给他装到一个盒子里面,这样我们就可以通过触摸这个外壳,从而起到一个隐藏式按键的功能,这样可以让我们的作品更美观, 就不会像这种按键突出来一块了,我们直接用手触摸这里就可以了,就像视频开头那样。 接下来我就以这种触摸传感器为例进行讲解。触摸传感器总共有三个银角, 生果是信号银角, vc 根源的正极,坚定根源的负极, 这个是连接图,接下来我们会用一个触摸传感器去控制一个灯, 触摸传感器接到二号管角,这个灯接到三号管角,如果不清楚这个彩灯模块的使用,为什么这样去接的话,可以看前面的视频, 按照连线图把线接好之后,接下来我们就开始变成序,这个灯的状态是由触摸传感器控制的,所以我们需要用到 创可打印,去看一下这个出门传感器具体输入给物流版的值是多少。 去打印数字,输入二号管角的值, 打开上个烟丝气, 手没有放上去的时候只是零,然后放上去只是一,然后松开是零,这样我们就知道这个触摸传感器 具体输入给物流版的值是多少了。然后我们需要声明一个变量,所谓变量就相当于一个储存数据的容器,这个 iton 就相当于这个容器 上面贴了一个标签,也就是编了名,编了名我们可以自己去改, 这里我就不改了,最先让他只为零, 然后去判断我们的手是否放上去,如果 二号管角输入了值 十一的话, 那么就代表这个手放在这个数目传感器上面了,然后直行让指示灯状态的这个 iton 变量取一个反, 也就是将之前 itan 的值取一个飞之后再复制给这个 itang。 如果之前 矮他们的值为零的话,那么执行这个操作之后就变成一,如果是一的话,如果之前这个矮他们值是一的话,执行这个操作之后矮他们值就变成零,这样这灯的状态就对应着就进行了改变, 我们的手放上去不是马上拿开的,那么这个条件会一直成立,只要我们的手一直放在上面,所以为了避免这个艾特曼只是重复去取反,所以 我们这里需要用到重复执行这个模块。当我们的手 放上去之后没有拉开的时候,也就是这个条件一直满足的时候,就让 程序在这里执行空操作,只有当这个条件不成立的时候,才会跳出这个循环,也就是手拿开的时候才会执行后面的操作。 接下来我们来判断这个指示灯状态的 电量, itom 的值是等于多少的,如果等于一的话 就让灯亮,否则如果等于零的话 就让他灭, 让灯亮的话,我们需要用到数字输出怎么块灯世界在三号 管角上的,让三号管角输出一个地点平就可以让灯亮,如果不清楚为什么三号管角输出地点平,就可以让这个灯亮, 可以看前面的视频,好,等于零的话就让这个灯熄灭,然后输出一个高电频就可以了。然后上传程序, 最先这个他们只是零,现在这个灯是熄灭的,然后我们用手去触摸这个传感器,放上去之后,那么这个灯就亮起来了, 然后再放上去,打开之后这个灯就熄灭了,这样我们就实现了视频开头的效果。
815iMaker 16:47查看AI文稿AI文稿
16:47查看AI文稿AI文稿好,各位朋友,大家好,我们上节课学习了用手机蓝牙来控制小车的运动啊,那包括我们前面学的红外控制和蓝牙控制,都是我们人为的来控制小车的运动。那么我们先看一下这个视频 啊,这个小车他沿着下边我贴好的这个黑色的轨道在行进,这时候没有人为控制的,他自己调整他的方向,那么其实这就实现了一种小车的自主行进啊,这个可以说脱离了我们人为的控制啊,那他是如何实现的呢? 那么其实他主要就用了这样一个传感器啊,我们需要至少需要两个啊,这个叫做红外寻鸡毛块啊,通俗一点 点讲,他其实就是一个红外发射与接收模块啊,我们看这里有一个 传感器,这是发射,发射红外光啊,然后遇到可反射的物体反射回来以后,然后这个接收住,接收住以后,然后就给这应该这个电压比较气啊,然后就输出开关量,高电瓶或者低电瓶 啊,这是他的另一面,那么这是一种类型的,其实网上有很多类型的啊,还有这样的,这接口焊好了,还有这样排针型的,当然还有这一种啊,这一种最常见。 还有这一种啊,这是一个红外发射的,这是一个接收的,接收到以后通过低压比较器啊,输出高电瓶或者低电瓶这类,我们看 vcc 基因 d 这一个 out。 那么 另外大家要注意的是什么呢?这个红外发射,他发射出来一个红外光以后啊,比如说遇到比较浅的颜色的物体,他会反射的,那遇到黑色的啊,他会把这个红外光吸收掉,不再反射了,所以这里就接受不到了,所以我们就可以通过他来检测 啊,嗯,能反射,不能反射的物体啊?下边我给大家做一个演示, 我们看这个,我这里啊,现在就有一个这样的一个模块啊, 这里有两个,一个发射的,一个接收的,然后我把它接在这个 l 口上,我们观察一下, 我把它接在第十二,第 十二短口啊,十二银角,他有三根线,一个是 vcc, 一个金币,还有一个 outout, 就是输出高电瓶或者低电瓶。 好,我们看我现在通上电以后,我们发现啊,现在这上面这个指示灯是不亮的,当我为什么不亮了,因为他下边没有反射的东西,这个距离可以通过上边这个小的电位器来调节啊,就是这样一个电位器啊,这样一个电位器 啊,有些有,有些设置的是没有的,是不可调的。然后我们看,当我靠近桌子的时候,哎,你发现这个指示灯亮了 啊,我远离的时候,他发射的红外光的强度啊,没有这么强,所以他反射回来接受不到。嗯,当我移动,我们看到桌子上我贴了个黑色的胶带啊,我以同样的高度往前移动,移动,移动的时候, 哎,移动到黑色的时候,他熄灭了,黑色的,把红外光吸收了,所以他不再反射,那么这样的话,我们就可以以此来判断啊,小车是否沿着这个黑色的 路线来行走啊,通过这个开关就可以了。下边我们通过程序来获取一下他,嗯,输出的,输出的数值到底是多少? 那么我们先定义一个 啊,红外输入十二银角,设置他的银角模式为 这啊,试着,哎,阿姨啊,试着他的为输入模式,因为我们要获取到他的状态,然后我们就可以读取他的状态了,这种 用这样一个就可以了啊,我们获取他的状态,那么获取完以后怎么办呢?我们给他打印出来,所以这里要来一个创口初始化, 那么我们把它打印出来就可以了。 好,我把程序上传一下。 嗯,有问题啊,这个数据线可能有问题。 好,上传成功我们看 看一下啊。呃,我先要打开这个创作助手, 我们看他现在输出的是零啊,输出的零什么什么情况呢?也就是说他不反射光的时候,也就是我们遇到黑色的时候啊,我们看现在我把它往下放 啊,遇到能反射红外光的物体的时候,他输出的是一,我移动,移动,移动,移动到左侧的时候,哎,移动到这个黑色胶带的地方的时候,我们看他输出了零, 所以以此我们就可以来控制这样小,用这样的数据来控制小车了。那安装的时候我们怎么安装呢?我把这个放大一点啊, 安装,我们这样啊,我们把它装在下边,我们这个小车的这个这个底盘当时设计的时候已经给我们设计好位置了,当然如果我们自己设计小车底盘的话,我们可以把这些红外发射和接收的这个模块直接设计在 pcb 上就可以了 啊,下边我这里已经我们从这个空里穿过来啊,是线显得整洁一点,把这个电源拔了 啊,我这这里有两个尼龙珠啊,我把它上上,然后再给大家解释。 好,我们看一下啊,我给他装在这里了啊,啊,我这个当然我们看方向就装反了,我们要是这个传感器朝向地面的方向啊,所以我把他的方向调整一下, 调整到这样就可以了。 当然如果你没有这些尼龙柱的话,你用热熔胶直接粘在小车底盘上也行,但是注意这个距离啊,这个距,我们看一下这个距离啊,看这里这个距离不要离,离这个地面过 大约一到两厘米就可以了啊,那这样的话,而且你要注意这个宽度啊,我们看一下这个宽度, 这个宽度啊,我们在这里应该可以看到这个宽度啊,恰好比我们的胶带宽一点,我们比一下 比他宽一点就可以了啊,那宽一点会出现什么情况呢?我们看啊,那就说小车正常行驶的时候,左右两个传感器啊,都能接收到反射的红外光,所以他们输出的都是一 如果啊,比如说小车到拐弯这里转弯这里的话,我们看一下啊,继续向前走,哎,右侧,这个右侧这个是不是要到黑 黑色的上边?黑色的他返回的是零,这时候我们让小车左转就可以了,如果是比如说是右转的话,右侧是零的话,我们让他右转就可以了,这样他就会自动调整他的方向。那下边我们写一下程序。 那这个,呃,电机的控制啊,呃,我们还用上节课的就可以, 我把电机控制的部分复制过来 把,我们不需要, 要用的啊,不需要用的,嗯,速度值我们要留着啊,这个我们不需要,然后是这里边控制的部分,我们只需要改一下就可以了,其他的不用动, 留下的是电机控制的。那我们就可以写了啊,我们当然这里边要声明两个变量,一个就是,呃,左侧,左侧这个传感器啊,我把它 左侧这一个和右侧这一个用,他们来判断左侧的红外传感器是,嗯,我们看一下是第几银角,左侧的是第 十一银角,十一,右侧的是第十二银角, 那么我们就开始判断了啊,判断如果,如果什么呢?他两个都是一啊,我们把这个写出来啊,黑色的, 黑色的时候他输出的是零啊,要不然一会就忘了。 如果他两个都是一,那么我们让小车直行就可以了,那我们获取 获取这个左侧的 他等于,并且啊,这个符号我们前面已经讲过了,并且右侧这个 他也等于一,那这时候两个都没有检测到黑色的这个胶带,我们让小车向前就行了,向前就是发握的, 然后给他一个速度值,速度我们就用这个四 p 的 y 六 就可以了。那其实我就可以把这个复制一下啊,复制一下。如果啊左侧为零,说明左侧有黑色的胶带,他已经压着胶带了,那压着胶带说明这个我们就应该想 向左转弯了,那我们让他左转就可以了。 time left, 那同样如果啊,如果右侧为零,说明右侧压着胶带了,让他向右转弯就可以了,所以是他 red, 那这样的话其实就基本上实现了这样一个功能啊,当然你啊,我们只是实现了最基本的巡记,你后边还可以加上其他的,比如说我前边这里贴一个横的交代啊,两个都是零的话,我们可以让他刹车 啊,这个我就不再写了,我们把程序上传 啊,这个接口又出现问题了啊,我们现在在设计板子的时候啊,我自己画的板子,我现在就不用这个,太不 c 口了,很容易出问题。现在用这个啊,不用这个,以前的这个。呃,迈克尔 sb 了, 用的就是太不碎了。嗯,双向都可以插 好,上传成功,上传成功啊,我们我们把这个线拔掉啊,稍微测试一下,我桌子上位置也不够大, 哎。发现他已经转弯了是吧。已经实现了这样一个功能啊,你看他已经转弯了, 那么我们现在只是给出了他一个最基础的用法啊,当然你可以加上。嗯,其他的。刚才我说的啊,功能更 丰富一点啊,我们这里只用了两个。这个红外熏鸡毛块啊,你可以用四个啊,判断有九十度的弯啊什么的都可以判断啊,我们这里只是讲它的基本方法,抛砖引玉啊,以后大家可以设计自己喜欢的作品, 那么这是我们用 id 一来写的程序啊,当然这个米斯奇的程序我提前已经写好了。嗯, 我这里就不再讲了啊,这个非常简单。 米斯汽车程序啊,你们看我这里说一下啊,我们看右侧这几个,这几个是电机驱动的,呃,就是前进左右后退的函数啊,我把它封装到一个函数里边,这里要 输一个参数 x 啊,我们写太多的话啊,每一个展开都是这么长,他比较占位置,所以我把它折叠,折叠以后啊,这样看着就比较简洁了。 然后我们声明完函数以后啊。嗯,在这里函数啊,声明完以后只要调用他就可以了。比如说我这声明一个前进,这里会出现一个,你可以调进前进的,我们在这里调用他就可以了 啊。然后这个具体的我就不再讲了,我把它放在网盘里边,需要了,大家可以下载下来自行研究。 那么今天的课程我们就讲到这里啊,下节课我们学习。嗯,轿车自动避障,就是前天遇到障碍物的时候,他会自动转向。好,大家再见。
322多一事不如少一事











猜你喜欢
最新视频
- 2286全球不知名数学爱好者