埃斯顿机器人更换电池后如何复位

粉丝7700获赞5.6万
相关视频
 00:24
00:24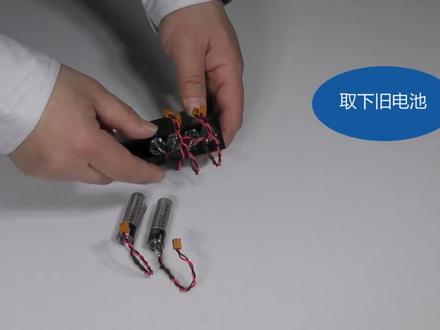 06:56
06:56 00:43查看AI文稿AI文稿
00:43查看AI文稿AI文稿有粉丝问我,机器人如果断电了,靠里面的电池他还能操作多久?其实这个电池啊,他是用来保存各个轴的绝对值编码器数据的,如果视角器上显示零七八的报警,那就说明啊,机器人本体和控制器上的电池没有电了, 我们要更换机器人本体的电池,那怎么换呢?首先啊,在更换电池的过程中,要保持控制电源是打开状态,否则呢,就会造成零点位置数据的丢失,找不回来的。 然后呢,按下急停按键,保证机器人处于不能动作状态。打开机器人电池盒上的盖子,把旧电池拿出来,换上新的电池,然后啊,把盖子拧好,电池就换好了,是不是非常的简单,你们知道控制器上的电池是怎么换的吗?评论区告诉我下播。
115山东沃川智能科技有限公司 05:15查看AI文稿AI文稿
05:15查看AI文稿AI文稿大家好,欢迎回来。在之前的内容里,我们聊过运动指令、控制动作、 i o 指令实现设备互联, 但机器人在执行复杂任务时还需要处理各种数据,比如抓取零件的次数,运动的速度值或者弓箭的坐标偏移量,这些数据的存储和修改就需要我们今天讲的指令。赋值指令 新建里面,控制指令中下面有个点点点,等于号点点点,这个就是我们的复制指令确认。接下来我们讲解它的作用、操作方法和应用场景,让你明白如何使用复制指令给程序传递数据。 首先明确复制指令的核心作用,它是艾斯顿机器人编程中用于给变量分配数值的基础指令。 简单来说,变量是程序中用来存储数据的容器,而复制指令就是往这个容器里装东西,或者说更换容器里东西的操作。没有复制指令,变量就是空容器,无法参与设计中的计算、判断和参数设置,机器人也无法处理动态变化的数据。 首先认识一下变量类型,复制指令使用之前必须先定义变量,也就是创建好容器。爱思顿机器人中最常用的变量类型有两种,对应不同的数据存储需求, 一个是 int 量整形变量,用于存储没有小数的整数,比如零件的抓取次数,弓箭的编号,计数器的数值等等。还有一个是实数型变量 real 量, 用于存储带有小数点的数值,比如机器人的运动速度啊,坐标位置,传感器的压力值等等。这两种变量是赋值指令里最常用的操作对象,定义时只需要在软件的变量表里面新建就可以了。 然后我们了解赋值指令的使用方法。 爱思顿机器人中的复制指令,操作逻辑很直接,等于号右边添加一些数值或者表达式计算的结果,复制给左边的变量,也就是说等于号右边,同时可以添加函数、运算函数、数学函数等等 其他函数,这些可以将运算结果复制给左边的变量。 赋值指令的价值体现在他能让程序处理动态数据,而不只是能够使用固定的参数。结合之前学过的指令,我们举一个生产中最常见的例子啊,动态调整运动速度,给大家直观展现一下。 在进行抓取不同重量的零件的时候,需要切换运动速度,我们用赋值指令配合依附逻辑判断,就可以实现速度自由切换。我们先给这两个变量赋上不同的速度, 发轻的物件的时候用速快点,一百发重的物件的时候我们用六十, 我们添加一个判断,等待零件到位信号, 我们这边缺一个变量,我们还需要添加一个变量, 我们判断一下二十一的信号,就是它来了之后有这个信号就代表是轻量零件,我们就把轻量速度浮到运行速度中,否则的话就是重量了,我们就用重零件的速度, 这样我们就判断完成了。让我们添加一个运动指令,随便目运行到这里,这样我们的程序写完了。我们这个程序通过第六行跟第八行的复制指令,将对应的速度复制给 speed t c p, 让机器人自动切换运动速度,适配不同弓箭。 总结一下,赋值指令的核心是给变量传递数据,先定义变量类型作为容器,再用变量名等于数值或表达式的格式实现固定值计算结果或变量间的数据传递。 它是机器人处理动态数据的基础,无论是统计数量、调整参数,还是实现复杂逻辑,都离不开复制指令的支持。今天的内容就到这里,我们下期见。
47智能制造滕老师














