三菱六轴机械手示教器使用方法

粉丝1414获赞3927
相关视频
 05:45查看AI文稿AI文稿
05:45查看AI文稿AI文稿嗯,今天我们来讲这一个机器人的零点教定吧,零点教定呢,我们这个上面呢先讲两种, 一种呢是这个通过原点输入的方式,还有一种呢就是这种 abs 原点方式。 首先先讲一下这个圆点收入的方式,就是找到机器人本体底座,一般呢像大部分的都会在底座外面的, 就是他是在需要拆下来一块盖板,然后呢还有的呢是直接呢就是在机器人上面以四轴的 ch 系列的呢比较多。呃,反正这个圆点呢反正都是 只会在这么几个地方,不会在别的。然后呢他是一串乱码,他是一串乱码,就 因为模拟的呢是看不到的,就像这种的像什么零零啊, umpi 啊,找不到关系的一串乱码,有的时候还有特殊制服的。然后呢输入到维,呃,输入到维护预报的这个,我们先把这个擦掉, 输入到这个维护,然后圆点数据就是这个圆点数据输入的方式, 他一般都是会一一对应的,比如说像四轴的呢,他就是一个第一,然后接一到接四,六轴的呢就是第一接一到接六。嗯,这个里面呢你可以呢保存到文件,就是呢把这个呢保存到 到跟我们那个工作区下面的那个工程,它里面呢有一个文件夹是可以放这个文件的,就是圆点的数据的一个文件,你也可以呢直接写录,那写录的时候呢要记得这个操作面板, 这双面板他是要把那个机器人呢当前的是掉电,就是这个四伏吗? 这个是福呢,一定要是 of 的状态,不然呢会报警是不可以写进去的,那么要复位呢,然后再重新写一下,这里呢写入啊, 还有一种呢是这个 abs 圆点的方式,那机器人呢,在他出场的时候啊,他都会在他的关节圆点啊, 他贴上那个一个三角标签,或者是像现在的 c h 系列的,他是那种直接打的那个钢槽,但是他都是有对应的啊。 嗯我也要注意的呢,就是像四轴的接三接四呢,是要一起写的,就是一起勾选,就是在这个勾选接一接二呢,你可以单独呢勾选接三接四呢,你如果要写入的话呢,你就必须要一起勾选啊, 呃六轴的话呢,同样的是接五接六呢,你要一起呢勾选进行呢圆点设定啊, 这个是 abs 的输入方式,那还有呢就是抓手输入方式的 高手输入方式呢,这个要借助一根那个自举报去,呃去去去,那个去视角的,这个呢我们呢暂时呢不过多的介绍。 然后圆点这个里面呢还有一个就是在呃知道就好,就是在后面有可能会碰到富家轴的那个, 呃做项目的时候呢,他附加轴呢,他是会需要设置一个用户圆点的,正常的我们呢就是在接七啊,或者是接八轴给他设置一下用户的圆点啊,到时候呢他这个圆点数据里面啊,他自动的会出现一个乱码,这个呢就作为 结清,就是副家族的那个原点,这个呢自己呢需要知道一下。 然后我们说一下这个一般判断原点丢失的依据就是机械手啊,他的软件或私教器点位的数据为零啊,或者是直接都是新没有数据, 这是一种。第二个呢是机械手移动方向异常,有的时候呢就是当你默认的坐标系的时候啊,默认基准坐标系的时候,但是呢他的 xy 比如说走斜了,或者是走反了,那这个呢也是远点不对。第三个呢是发生了重大的撞击,之前视角的点位不对了,重新视角之后呢,跑着点位呢,仍然不准。 还有一种情况呢是换电池错误导致的,就是导致的他的那个圆脸丢失,那主要的呢是这几种情况啊,就需要进行了圆脸消定了啊。 还有这个呢是补充一个啊,就是或一个是没有数据,或 或者呢数据很大,几千几万这种都有 啊。然后我们这节呢,到这里呢就结束了。
 12:29查看AI文稿AI文稿
12:29查看AI文稿AI文稿嗯,大家好,今天呢我们来说一下这个六周的话,嗯是如何?就是说建立工具坐标点, 那当然我们在之前的,嗯视频当中呢也有奖,那我们今天呢讲一个就是不一样的,那通过这个 工序这个里面这个薄荷长度这东西上来实现。 那我们呢首先我们首先先建立一些模型啊, 我们这里呢最佳新的,嗯,然后说建个六吧,然后进行编辑 更新了,在这个他这个就是模拟那个解锁的法兰的,那我们点一下这个最佳误解, 然后我们先给他取个名字吧,然后 咱们呢就是模拟那种尖端啊,就是咱们在效效功率点的时候都会有一个尖端 啊,就这个圆柱,然后把这个统一半斤的给他设置成甲,然后这个大小里面的这个表面半斤呢,咱们设置成一,底部的半斤,咱们设置成五十,高度的话咱们设置两百看一下, 咱们设置成两百台一下,位置呢咱们不用动,位置咱们不用动,然后点击一下这个保存 好,就是像这样,然后呢咱们在下面呢再放一个物件,咱们在下面呢也放一个物件, 那么这个物件呢咱们呢跟他是一个倒着的一个圆柱啊,这里半斤给他也是农村讲不同, 表面呢咱们来一个一,然后里面的话咱们就用一百吧,高度的话咱们高一点, 咱们来看一下啊,差不多。然后呢咱们呢?呃,当然这个有点远啊,咱们往这边呢放一下位置的话,咱们放 放到这个是三百,那咱们呢就放到三百吧,这样呢也差不多了,然后呢咱们呢就去这个 设置工具点托好长度,自动计算给他打开,然后 这个里面呢咱们呢可以呢选择你待会要把拓这个试交出来的拓数卷给他放在哪一个这个拓里,咱们呢可以呢选择一个拓二, 就是待会呢他会放在这个托二里面。那么第一步怎么办呢?第一步的话呢,我们先 这个移动,第一步呢我们先把这个先第一个点呢先给他,给他先对上, 那在实际项目当中呢,如果需要遇到需要设置工具点的项目呢?呃建议呢是要前期呢先做一个,就是说呃 仿尖端的那个字句啊,接手上面一定要装一个仿尖端的那个字句,你要设置在哪个点,你就要做一个相应的字句出来。 好,我们来看一下啊,那咱们呢这个就是大概的只要他能对上呢就可以了啊,这第一个点就可以了啊,然后点击这一行,然后把这里呢是用于计算的这个勾呢,一定要把它勾上啊, 把选择的行呢施教,那么这一个位置呢,他就施教完成了, 这个位置就已经保存在这个里面了。然后呢咱们现在来旋转,这是多姿势, 弄好了之后呢,再把它给再对上 多个角度去拉动这个视图,然后看一下啊,基本上对上了之后呢,就可以把第二个点给他再试交一下, 有这种 切换不同的姿势,然后再把它给对到原来的尖端的就可以, 这样的话呢机器人的内部呢会自己拿来计算一下, 那差不多第三个点呢,我们呢再睡觉一下,那么 现在呢这个当你如果说他已经计算出来呢,下面呢会出来这个坐标的,那么不够呢,咱们呢就接着呢去试交啊, 我们就接着第四个点再动一下机器人, 好差不多呢这个点呢也对上了之后呢,咱们就可以再点击这个第四个点,然后把选择的好好撕掉 好了。那大家呢可以看到这里腰肌酸的坐坐标呢已经呢出现在这个地方了啊,当然呢他下面呢还有 一个推测的误差,那我们正常推测的误差呢,如果是做的越小越好,像这个已经有四个毫米呢,一般呢就是呃误差呢比较大,正常呢应该是要在 呃看完这个看要求了,比如说你没有一些呃精度要求的话,只是比如说为了方便做动作,那么这个呢其实呢误差呢还好,那么咱们这个里面呢就教一下这个方法, 因为咱们这个是在这个模拟里面呢,是不好这个看的啊,然后呢咱们把这个写入一下,写入到这个参数里面去,他就会把这个 个拓这个数据呢写入到这个拓二,这个拓个坐标这下面啊,然后呢这里呢是是否呢要将运算出的拓长度设成当前的拓个坐标,那咱们呢 选择一下四,因为呢咱们呢那这里看到这个拓坐标呢已经显示成拓二了啊,咱们要去检验一下, 那么检验之前呢咱们咱们先检验吧,检验的话其实就是 abc, 你转一下原先的话,这个错误工具点的话是在这个法兰这里啊,所以呢现在呢他已经进行偏移到这里了啊,所以的话呢,我们在绕着 工具点来做旋转的时候呢,他就是绕着那个工具点来旋转,大家可以看一下啊, 他是落在尖端的在旋转的啊, 再来看一下 b 组, 可以看一下,然后 c, 那那我们做的这个工具点呢,都是没有问题的。那么其实呢大家可以呢把这个破口坐标系的显示啊,给他设成一个。真的。那我们可以看一下 当前的这一个托我坐标系的这个显示啊,用 a 克制方向和 y 方向和 z 方向。那我们来看一下, 其实呢他这个点呢就在这里。 好的,那这个呢就是我们呃,三年机器人呢,他的六轴一个做工具点的一个 方式啊,也是跟其他家的那个呃,四点法,六点法差不多的啊,这个呢就是四点法啊。
 00:51查看AI文稿AI文稿
00:51查看AI文稿AI文稿三菱机器人试教器支持热插拔,但拔出的时候有一定的技巧。首先将锁定 ur 杆向上拔起, 握住视角器接头,然后将视角器上的三位置开关打到中间位置后,握住视角器连接头快速向外拔出。我们看到机器人在不报警的情况下拔下视角器接头, 如果我们不将视角器上的三位置开关打到中间位置,或者再将三位置开关打到中间位置后超过五秒后再拔掉视角器接头的话, 机器人会发生急停报警,我们演示一下。
 02:18查看AI文稿AI文稿
02:18查看AI文稿AI文稿员工机械手怎么给他做简单的测试呢?先打开机器人控制器的电源,再打开我们的机械手调试软件, 然后新建一个工程,选择对应的机器人的型号。 啊,我们这个是七公斤的,然后后面的就是不需要做设置,然后提示是否在线,然后点这个在线啊有一个操作面板 选择, ok, 这时候,嗯,我们可以选择我们之前编好的程序,这里面有个测试程序,然后也可以把它 把这个程序打开,这个就是我们刚才打找到的这个测试程序, 这个是这边是机器人需要执行的步骤,这每一个步骤然后都有他对应的坐标, 然后这边是每一个步骤所对应的坐标。我们把呃在视角模式下,我们可以把移动到某一个位置,然后把当前位置读取出来,然后保存在这个里面, 这个就是每一步的坐标,然后这边是机器人需要执行的每一个步骤。来我们看一下,演示一下我们今天 我们之前做的这个测试程序,看一下啊,在这之前呢需要先打开四伏,需要四伏昂啊,四伏昂以后这个电机就已经 已经在准备好的状态,我们点成这个开始就可以执行我们这个程序了。 好,机器人已经动起来了, 你学会了吗?感谢大家的观看,欢迎点赞关注!
150杰哥自动化 01:12查看AI文稿AI文稿
01:12查看AI文稿AI文稿这个拖动试驾我们搞完了,然后给大家演示一下啊。开机,然后就可以拖。左右随便拖吗?右随便拖上可以拖多久?上? 可以拖两分钟。转脑袋,转脑袋,然后转回来,然后之后就要停到这。嗯,好,然后再按,这就录制完成, 他要先复位的开始。对,然后我们再按开始,再按开始就是重复刚才的那个动作。好, 左右左右上。哎呦,这动作蛮激动的,转哪来?往那边转,然后停,停到刚才这个位。 啊,这样做。哎,他怎么又动了?他会再来一点啊?他就会一直一直循环,一直循环这个动作啊。 然后供电很简单,需要一个快充头,然后这边直接连 type c 就行了。然后主控呢?这个硬件会全开源。嗯,软件会部分开源。嗯,就到这了。好,拜拜。
2616小Dou有两块钢铁 28:15查看AI文稿AI文稿
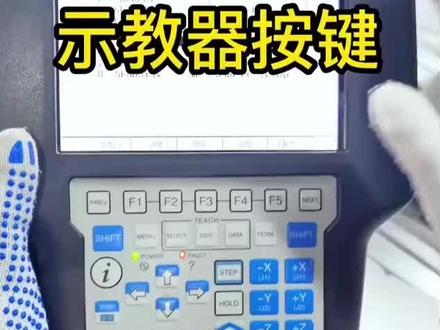
28:15查看AI文稿AI文稿那么呢我们呢接着呢给大家讲这个操作面板,就是刚刚打开的这一个操作面板啊,这里呢都是我的, 呃,根据这上面名字呢在这边呢先呃写的,然后呢大家呢可以呢后面的自己呢多去呢看一看。 然后呢我们呢直接呢看着这个上面啊给你讲我们这个操作面板啊给他打开,然后把这个旧杆也给他点开, 然后大家可以看得到呢这个状态啊,这里面呢是可以显示机器人当前的一个状态,那现在的状态呢是他可以呢选择程序了啊,然后呢我们 呢下面呢是一个程序呃程序呢这里面呢是空的,那我们呢在后面这个选择啊,我们呢点开这个选择是这个按钮,然后选择刚刚的这个命,然后呢点击这个 ok, 那么呢他就是已经选进去了这个程序名,然后包括这个行号现在执执行的是多少行?现在呢他停在的是第一行, 那比如说我们现在点击一下这个第二行啊,我们让他跳到第二行啊,我们并没有执行啊,我们只是想把这里呢他现在呢已经从刚刚可以选择程序呢他变为这个待机当中。 他现在呢是变成跳到第二行了吗?他现在是待机档啊,当我们呢点击这一个 复位啊,复位的话呢一个是复位报错,刚刚说过了,就是一旦机器人有什么报警啊,可以呢把它复位掉。还有一个呢复位呢他的复位程序的点击一下这个复位,那我们可以看到刚刚这个行号呢从第二行呢就变成了第一行, 然后这里呢从待机当中呢又跳到了可以选择程序, 然后这个速度比例呢是可以在这里面做密码的一个调整,他速度的一个调整。比如说我们可以在这里面呢进行选择, 又或者呢是加减这种呢进行选择的。这个四伏呢就是四伏上电的意思,就可以机器人的里面的电机啊供电, 然后这个四伏 off 呢就是呢四伏呢就是掉电,然后这个开始呢是开始运行程序的, 就是比如说我们刚刚这个程序,如果说你点一下呢,开始呢他就能开始运行了,这个停止呢是立马停止的意思,然后这个复位啊说过了这个结束呢 就是缓慢结束,然后这个三 d 呢是三 d 监视,就是把机械那个监视的画面调出来, 然后这个报警呢是可以,比如说有正在报警的呢,然后你点开,那么他这里呢就会跳出正在报警的那些报警状态。然后又或者呢我们呢去可以呢点开历史,然后点击这个 ok k 可以看到他历史的一个报警状态,我们现在还没有报警啊,如果有报警的话呢,他这里呢会跳出来的, 然后这一个呢是程序监视,程序监视呢是监视这一个插槽的, 那插槽呢我们后面呢会讲啊,因为我们现在呢这个选择的程序是这个命,所以呢我们这个任务插槽啊,他这个里面加载的程序呢就是这个命,这里面呢只可以做监视使用啊,就是你可以看到这个光标现在停在第一行 啊,因为我们没有启用程序嘛,所以呢他就停在这个地方,然后包括下面的他是监视一些变量用的,变量用的呢你点击这一个追加,你呢就可以, 可以呢去监视,比如说一些系统的变量啊,这些都是系统的变量,然后包括你刚刚程序里面写的这一个点位,这个点位呢也是一个变量, 包括这些系统的变量。那因为我们刚刚的这个程序里面的只有这一个变量,所以呢他跳出来就只有这一个,你也可以呢自己呢去输入,当你后面变量用多了呢,你可以呢自己输入去监视这个变量, 主要是去检查程序用的,然后右边呢这一块呢它是一个信号, 他这个呢是上面的是输入的信号,可以呢看到呢外部有没有什么输入信号给过来。然后这里呢是下面的是输出的这个信, 输出的信号呢可以让我们自己呢主动的去,比如说控制一些电磁阀,气缸啊这些东西 啊,这里呢是有设定的,设定呢就是输入输出的信号,它的起始位是从哪里开始的?因为我们 呃 io 板卡呢,如果你使用 io 板卡呢,那就只有零,最多呢两块 io 板卡就最多呢零到六十四,呃零到六十三,一共六十四个这个信号输入输出呢都是这样的, 那当我们使用不同的绑卡呢,我们有的绑卡呢信号呢它是从两千开始的, 那么还有的呢信号呢他是从六千开始的,这个呢就需要呢去呃 看一下到底是选用了什么,然后呢这里呢信号,其实呢把它呢做一个更改嘛,然后呢就可以去监控一下这个信号,对不对啊?下面呢是一些计程序啊。 嗯,当我们用到了一些,比如说像 czlink 的时候啊,然后会有计算器,那么呢我们可以看一下计算器的值啊,那这个计算器呢,一般呢都是十六位的啊,可以呢,看得到这个计算器的值呢是多少, 要么这个程序监视里面这个东西就到这里。 呃,我们下面再看一下。呃,单步,单步呢,刚刚的上面已经说过了,我们可以去用于 调试状态,是走单步,下面的这个直接执行呢,我说过了,就是比如说我直接呢移动点位, 直接呢执行机器人的指令,比如说木这个 p, 移动到这个 p, 然后点击一下执行啊 啊,可以看得到现在呢刚刚报警,这个报警的意思呢?就是,呃,因为我们这个四伏啊,没有上电,所以呢他才会报警啊,我们这个时候点一下复位啊,你看报警没有了, 然后显示在待机当中。因为刚刚报警嘛,所以呢他显示在待机当中,那么再按一下复位啊,他就可以跳到这个可以选择程序这个里面了。那这个抓手呢?刚刚说过了, 一个是这个里面呢可以呢控制这个着手的这一个开臂,那减呢就是 close, 加呢就是 open, 就是关闭打开的意思。 然后这一个旧的呢就是去移动机器人的关节啊,或者是直胶走周边系啊,都可以的。然后它下面呢有呢突破数据, 还有呢一个 bes, 这个弓箭啊,这个弓箭啊弓箭呢,我们也可以选择 bes 零到 bes 八, bes 零呢,就是不用, 然后这个 off, 这个 off 呢是我们之前说的那个寸动跟点动的意思,比如当你选择 off 的时候呢,你一直按着 它是会一直动的,当你选择 high 跟落的时候呢,你一直按着跟点动呢,是没有区别的,它只会动一下, 然后呢这里呢是可以看得到,就是那个系统输入的话,他到底是给你呃是一个自动的状态还是一个手动的状态?都在这里, 那么我们这里呢要看一下它还有两个,就是 f l 一跟 f l 二,这是两个,呃, 一个是 f l 二的话是多回转数据吧, f l 一的话是它的手续,这个里面呢 一般呢是不需要自己呢去更改的,一般呢你视角出来是什么样子呢就是什么样子,但是要记住这一个多回转数据,多回转数据呢有可能造成呢就是说机器人,呃,比如说像四周的话, 那么就会有可能造成呢机器人的那个四轴的话,他多旋转,这个呢在实际的那个调试过程当中啊,呃, 也许呢会发生,也许呢不会发生,这个呢就是看自己后面去调试的时候发生,到时候再看看。 然后我们下面讲一下这个个产 甘肃常用功能的介绍, 这里呢我们先擦掉啊,然后这里呢参数呢都在这个里面, 这里呢有参数一览,这个参数一览呢它里面呢有机器人的各个参数,包括你下面这些什么动作参数啊,程序参数啊,一直到这里参数呢他这个里面呢都可以找得到,只是呢他这个里下面呢帮你分了一下, 你可以呢直接去这个里面参数去找。那他这个里面呢就需要你对参数的名称啊特别的熟悉,所以呢一般呢是不在这个里面去找他的那个参数去更改啊,或者是读取啊,这些参数呢 都不在这个里面的。呃,这个里面呢有一些参数呢?呃, 会用的到,比如说我们的一些,呃机器人,比如说他的那个机制码啊,又或者是机器人要初始化他所有的参数啊, 又或者是我们后面程序上面会用的一些用户的那个参数啊,呃,亦或者是用的比较少的那个吊装,还有 正装的那个改写的那个参数,那么在这个上面呢都是可以呢找得到的。好,我们看一下这个动作参数里面, 动作参数呢里面的动作范围呢,是查看机器人关节的范围的,然后重量和大小呢是可以设定机器人抓手重量和大小。 拓呢可以查看贝斯坐标跟拓数据。用户定义领域呢,可以定义区域,机器人在区域里呢是让他报警的还是做信号的输出的 附加轴呢?是使用附加轴功能的时候需要进去设置的一些参数。充头减脂呢,是设定机器人充头减脂,呃充头减脂的一个参数。弓箭坐标呢是设定弓箭的一个 数据,这里呢写错了, 是设定了弓箭的数据的,然后力觉控制呢,是使用力觉的功能的,然后插槽表呢,是设置后台的运行程序,比如说后台 一直在运行的一个程序啊,我们呢是通过这些呢进行那个的,其他的呢?这个里面呢没有呢?呃用到的呢没有介绍到的呢,就是基本上用不到的那些, 然后通用一呢是设定专用的信号的,比如说我们机器人的那个外部来控制的,启动了停止啊, 呃给操作权啊,或者是四伏,呃上电或者是吊电,这些呢都是在这个通用一里面设置的数据呢,这个里面 一般可以用于那外部信号来切换我们的程序号,比如说我们选择的是一号程序,然后把它切换成二号、三号、四号啊,这种呢是可以通过呢外部信号来切换,或者是我们操作面板上面那个速度,也是可以通过外部信号来做切换的。 然后这个仪态网设定呢,这个 e snap 设定,这个里面外部网络端口通讯使用的,又或者呢是你要更改机器人的 ip 地址,也可以呢在这个里面进行设定, 然后现场网络参数呢是给那个绑卡使用的,那么相对应的呢,这个里面呢会进行一些简单的参数设置,那主要的呢不在机前这边,这个呢后面呢 用到的时候呢会再跟大家说。然后监视功能的介绍,就是呢还有一个监视功能, 然后这个插头状态呢,可以监视各插槽运行的一个状态,比如说你主程序在运行,你这个是可以看得到的,但是后面你后台,你比如说插槽二啊,插槽三啊,还有程序在运行, 那么你怎样去监视呢?就在这个监视这个动作,监视操作状态里面监视。 那么刚刚我们说的你主程序呢,一般呢当前运行的那个主程序啊,是可以在插槽一里面看得到的,那么你后面呢还有其他的插槽里面的程序,那么你可以呢打开这个二啊三啊四啊 这个任务插槽去监控看他程序运行的状态,这个呢是一个笼统的, 这个插槽状态呢,你打开呢它是一个笼统的,比如说你可以看得到有几个插槽在运行,但是呢你看不到具体的它运行到哪一个插槽,它运行到第几步这个样子。 然后维护功能介绍啊,维护功能介绍呢,这个原点数据 他是进行机器人的一个原点校定的,一般呢我们呢这个里面呢会用到三种, 一个呢是原点数据输入方式,还有一个是 a、 b、 s, 还有一个呢是字句的模式, 然后这个初始化进行控制器程序的初始化清零,还有一些其他的一些初始化。你比如说在这个里面你可以呢设置获取这个电脑的时间, 然后这个维护预报,维护预报呢是跟维护保养有关的,这个里面可以查看的电池剩余时间啊,或者是黄油皮带的使用时间。 然后七呢是备份还原,在这个里面呢他是有备份的,首先呢我们备份呢就右击这个全部,然后点击备份,可以将控制器内容备份到本地。还原呢就是 比如说像我们刚刚备份出来的这一个时间命名的文件,我们可以右击这一个文件,然后呢点击呢还原,点击 ok 就可以了, 那我们这个里面呢主要来看一下,呃, 刚刚这个动作参数里面呢,比较的简单,没有什么要看的。 然后呢程序参数里面主要是这个插槽表,插槽表呢,他这个插槽一啊,就是我们机器人这个,呃插座面板上面这个程序当前运行的这一个插槽一,它里面的这个 程序名,然后我们一般有后台的呢,会从这个其他的加载进去,比如说我们还有程序呢,那就选择一下进去,如果你要一直运行的,那么你就点一下这个 os 启动条件,他就是控制器一通电他就会运行, 那么我们还有两个,一个是报错的时候运行,还有一个是 start 呢,就是我们正常的启动条件 restart 呢,我们可以呢通过这一个程序来,呃, long 就是当你这个主程序运行的时候,然后呢通过程序命令来调用其他的程序,让他在这个里面进行运行,这个是两种方式, error 呢,一般的这种行动条件呢是用的很少的,不会用, 然后这个信号参数主要是这个通用一跟这个数据通用一呢,这个里面呢我们可以看得到。 呃,主要是一共呢是必要的呢是五个一个输入一个输出的,这个输入输出呢都是相对于机器人来说的,输入呢就是给机器人的,输出呢就是机器人输出给外物的, 一般我们需要这个启动,还有停止,程序复位、报酬复位以及操作权四服呢,是看要求,比如说,呃,我们的客户他想通过外部来,嗯把这个机器人 断电上电,那么你就让他给信号过来,因为我们的程序里面呢,我们是可以自己呢让机器人呢上电的,有指令的,所以我们呢就需要呢,至少呢是需要五个操作权操作复位,程序复位、停止跟启动。 那么这个呢,我们是可以自己呢进行 io 点的,进行一个配置的,这个五四一这些都是输入信号一,就是机器人的输入信号一,机器人的输入信号四,机器人的输入信号五、 关于输入信号呢,我们呢会在后面呢跟大家呢介绍,然后这边呢是机器人的一些可以可以发出去的一些状态,比如说我们运行当中要发多少,那别人知道我们机器 人呢在运行呢,我们报警呢,那也要让别人呢知道我们的机器人呢正在报警啊,包括你获取的操作权呢,那么我要反馈给你啊,我现在操作权呢被你获取着啊,我现在自己动不了。 然后这个数据数据里面呢主要是进行一些程序的选择啊,或者是速度比例的选择, 通过这个数值输入的开始位跟结束位,他是一个静字的一个组合,就是奥静字的一个组合, 通信参数就是刚刚的说的这个仪态网通信设定在这个里面呢,你可以看到机器人当 选的 ip 地址,或者是你去更改,在这个里面呢,你可以呢去更改你想要的去选的 ip 地址,然后设备端口在这个里面呢可以设置呢跟外部通讯用人的设备, 他的一些,比如说你要跟外部进行通讯,你做服务器还是做客户端,然后端口号是什么协议的话,我们一般选择数据连接, 然后结束编码啊,选择的回车还是回车加换行,然后分配呢?分配抗端口 就是用来通讯,一共是八个,然后呢我们的 com 一呢是不用的, com 一呢是留给机器人跟控制器呢进行通讯用的,我们一般呢使用的是 com 二跟 能看吧, 这个里面呢还有现场网络参数的,现场网络参数呢,这个里面我们一般呢用的比如说 cc link 的绑卡, 在这个里面设置占编号啊,战术啊,倍率啊,以及传输速度啊,然后还有一个现在默认使用的 ie feel the basic 啊,在这个里面只要你打开有效就可以了, 又或者是 profit bus 啊,然后网络版卡啊, profit net 或者是 internet 啊,这些呢都可以监视,这个里面呢就是动作监视,在这个里面可以见 是的插槽状态,那么如果有一直运行的那个后台的插槽,然后呢我们想去改这个后台插槽一个程序呢,我们可以在这个里面点一下程序全停止,那么他这个后台运行的程序呢他就停止了, 然后可以看一下这个程序监视,首先呢在这个里面呢我们可以点开我们的任务插槽一,比如刚刚这个主程序,在这里 可以看得到,可以监视到他的状态,然后又或者我们有后台的程序可以在这个二三四五六七八,然后都去可以看, 然后呢下面呢是是 信号的监视,信号的监视呢我们可以呢监视一般呢用的多的呢就通用信号,或者是有计算器的呢,我们可以在这里呢进行了计算器的一个监视。 通用信号,通用信号呢刚刚跟那刚刚的这里呢是一样的,然后呢你可以呢在记这里呢进行监视设定,包括其实的变化跟行号都是可以的,跟这个呢是一样的。 然后下面呢就没有就到维护了,维护这个里面的原点数据,原点数据我们用的比较多的方式呢,一个是这个原点数据输入的方式, 在这里面呢直接输入呢,原点数据当然八百的呢,他现在出货呢,他是不用进行 数据输入的方式,但以往的还是七五零的那种,以前的都是要的。还有一个抓手方式,抓手方式呢就是呃最后会使用的一个,他是那个, 嗯,就是通过自具棒来设定的一个方式,这个用的呢比较少,然后还有一个 a b s 是经常会用的到,经常会用的到的就是各关节的一个三角对齐,或者是一个 呃打的一个线用来对齐,然后来找那个圆点的, 然后还有一个初始化,初始化这里面呢主要是比如说时间进行设定啊,然后初始化程序啊,然后序列号的一个采集, 因为我们机器人本体呢跟控制器上面的他都是有名牌的,他都是有序列号的。然后这里呢维护预报, 维护预报呢是可以看的那个,嗯, 这个 r t 三呢,是看不了那个那个时间的了,但是呢可以看到那个润滑油跟皮带的 一个时间,就是在这个里面,包括呢我们在这里面还有复位,比如说我们给别人做维护保养的时候啊,更换了润滑油啊,或者是呃打了润滑油,或者是你更换了皮带啊,才可以进行重置, 否则你皮带我们一般只是调一调他张力,不会进行更换,所以呢不需要进行重置。 然后呢下面 就是没有发 works 呢,我们呢后面再讲,然后备份呢备份,比如说现在我们先备份一下,就是全部右击备份,那我们备份呢这个里面呢,我们一般呢是选择全部的,其他呢就什么都不选, 点击一下, ok, 点击一下, ok, 然后呢等他呢自动的备份就可以了,备份好了之后呢,你可以看得到在这个备份里面有一个这个以时间,就是你刚刚备份的那个时间啊,他 非常出来的一个文件。那这个文件呢,它是在哪里呢?就是在你自己呢建的这一个,比如说我们刚刚的这一个培训,然后这个边看, 然后在这个里面就是你刚刚的备份文件,那么我们要还原,怎么还原呢?就是在这个右击,然后点击这一个还原,然后再点击这个 ok 就可以了, 那我们这里呢就不还原了,还原的话又要浪费时间。 然后这个软件的话呢,大概这上面用的呢就都在这里了,我们在后面使用的时候呢,我在跟大家呢细说如何去用这里呢?先给大家呢简单的介绍一下, 然后我们呃 这一节呢讲的就到这里结束了啊,大家那个 ppt 呢要多看一看,然后知道呢这个上面的这些是干嘛用的啊?好。
 00:40
00:40 05:24
05:24 00:37查看AI文稿AI文稿
00:37查看AI文稿AI文稿怎么让机器人快速的回到原位呢?其实很简单,我们只要在试教器上看一下这边的程序编辑器,让我们可以看一下,按一下调试,我们看查看一下这个值,这个是目前这个机器人状态,他个个轴的值,我们其实只要把它给全部改成零, 我已经把六个轴的数值全部调成零了,这样就可以回原位了,我们来看一下,哎,首先我们要把 a p p 移至光标,然后我们就可以运行看一下机器人,这样就可以回到原位了,学会了吗?下课。
3707我是工程师! 02:05查看AI文稿AI文稿
02:05查看AI文稿AI文稿机器人如何工作?发纳科二,两千亿,这是一个标准的六轴机器人, 这意味着它可以在六个不同的轴方向上旋转。轴一轴二, 周三, 周四, 周五、 周六, 每个轴通过一个四伏控制, 机器人通过社交器进行控制,手动社交并记录位置。根据社交指令,机器人可以自动运行 末端工具,也可以通过社交器编程,包括所有应有程序和家具。湖汉 等离子汉,马朵夹爪, 雌性家爪,吸取式家爪。 以上就是一个标准六轴机械臂工作原理的简单介绍,后续还有更多技术分享,敬请期待。
662予希智恒科技 00:13
00:13 00:28查看AI文稿AI文稿
00:28查看AI文稿AI文稿有朋友说我天天拿台丑的要死的四周机器人拍,有本事上六周,接下来个六周一样可以在四周期上面直接导出生成轨迹,画完这个端端后面就开始装夹头,比如汉西头点夹头什么的都来一波, 一台机器人挣一千,一年就是三千六百万,想想都激动。
335南昌源冰智能科技有限公司







猜你喜欢
- 1.2万山西运城玲子焊接培训