微雪电子wavego怎么重置密码

粉丝1.5万获赞2.9万
相关视频
 01:40查看AI文稿AI文稿
01:40查看AI文稿AI文稿哈喽,大家好,欢迎来到由微雪电子打造的树莓派系列教程第二期树莓派的远程登录。上一期我们学习了给树莓派烧录镜像,树莓派的首次开机和简单的远程登录, 是否有些小伙伴遇到问题了呢?对于一些常见问题,这里给大家做了一个总结。问题一,我按照你上一期教程的方法操作树莓派开关,打开之后,连接显示器却什么都没显示,这是为什么呢? 这是接线顺序的问题,先将树莓派连接显示器,再接通树莓派的电源。问题二,我的树莓派反复重启,是不是树莓派坏了?首先,一个新的树莓派正常是不会出现质量问题的。树莓派首次开机,树莓派会重启几次,如果一直重 起,就要考虑供电的问题,电源功率不能低于五伏三安。问题三,连接显示器以后可以成功登录数煤派,但是数煤派不能连接 wifi, 这是因为我们没有设置国家代码。先点击右上角的无线部分,点击 turn on wireless land, 等待一会, 我们再次点击右上角的无线部分,此时我们发现树莓派提醒无线不可用。我们点击 click here to set wirelessland country, 选择 cn china, 我们再重新点击无线部分,这时就会显示出无线列表了。此时选择你的 wifi 输入密码,点击 ok, 此时 wifi 就连接成功了。
137微雪电子 05:15查看AI文稿AI文稿
05:15查看AI文稿AI文稿登录树莓派方法一,有显示屏登录树莓派镜像招录成功后,拔掉读卡器,将 tf 卡插到树莓派上,给树莓派先连接显示器和键盘,再接通电源,等待树莓派开机,就可以正常使用了。 方法二,无显示屏的登录数媒派,因为我们没有显示器,需要远程登录数媒派,远程连接需要开启数媒派的 s s h 和配置 wifi。 下面教大家如何开启 s s h 和配置 wifi。 首先我们在桌面上新建一个名为 ssh text 的空白文档,删除点 txt 扩展名。 新建完成后,我们继续在桌面上新建一个文本文档, 您可以打开,我们提供微雪微 key。 树莓派教程往下拉选配置 wireless line 无显示器复制粘贴以下内容到记事本 修改模板上的信息,这里填入你所在国家的国家代码。现在我们身处中国,所以我们填入我们的国家代码 cn。 如果你不知道你的国家代码,可以去这个网址里面查找。 ss i d 对应的是 wifi 名字, psk 对应的是 wifi 密码。 关闭记事本, 点击保存,将文本文档重命名为 wpa。 下划线 supplicant c o n f 将 ssh 和 c o n f 文件复制到 tf 卡的根目录下,那么现在就成功开启 ssh 和连接 wifi 了。可以取出 tf 卡装入树莓派开机了。获取树莓派的 ip 地址 获取 ip 之前,先确保数媒派已经开机成功。方法一,通过登录路由器后台查找路由器的背面有登录 ip 地址或者网址,注意, 你电脑需要连接路由器 wifi 或者通过网线连接路由器才能登录路由器后台。在终端设备里面就可以看到树莓派的 ip 地址了。方法 二,使用手机获取数媒派的 ip 地址在应用商店搜索 fimg 应用程序,下载完成后就可以使用了。注意,手机和数媒派必须在同一网络上,因此请将您的手机连接到正确的无线网络。 打开 fimg 应用程序,点击屏幕左上角的设备扫描, 几秒钟后你将获得一个列表,其中包含连接到网络的所有设备,就可以看到数媒派的 ip 地址了。方法三,使用 n map 指令在使用 n map 指令前,我们需要在电脑上安装 n map, 直接 打开,我们提供微雪微 key 树莓派入门教程,找到软件部分,直接点击下载 n map 安装包,解压安装即可。 安装完成后,在使用 n map 指令前,我们需要知道我们电脑的 ip 地址,通过电脑的 ip 地址才能知道 ip 网段,再去使用 n map 扫描这个网段下的设备, 按住键盘 win 加二键,输入 cmd, 点击回车确认。 进入终端后输入 ip confit 查看,我们这里的 ip 地址是幺九二点幺六八点三,幺点幺六三,则其他设备的地址是幺九二点幺 六八点三幺点零到二五五,我们在终端输入 n map sn, 幺九二点幺六八点三幺点零斜杠二十四,点击回车,我们就可以搜到树莓派的 ip 地址。 树莓派的远程登录,我们还需要下载远程登录软件 party 打开,我们提供微雪 vp 树莓派入门教程,找到软件部分,直接点击下载 party 安装包解压打开即可,无需安装。 点击 session, 在 ip address 输入数媒派的 ip 地址, 点击 open, 点击 accept 确认登录名为拍,密码是 raspberry, 输入密码是屏幕上没有变化,属于正常现象。密码输入完 完成后按回车键访问数媒派,此时我们就成功登录数媒派了。这一期视频到此结束了,感谢大家的观看,我们下期再见哦!
932微雪电子 12:15查看AI文稿AI文稿
12:15查看AI文稿AI文稿哈喽大家好,欢迎来到由微雪电子打造的树莓派系列教程第三期, linax 常用命令和编辑器使用。 在前面两期内容中,我们学习了多种方法登陆树莓派,但由于在四月四日树莓派官方对 rasparay, pie or exboss 进行了一次更新,更新之后很多小伙伴会遇到远程登录失败情况, 那是因为此次更新删除了树莓派默认账户派。第一次登陆树莓派需要创建一个自己账户,在创建用户账户之前无法登陆树莓派,我们推荐两种方法创建自己的账户。 方法一,我们可以使用 rasparappaic image 设置,我们点击高级设置,勾选开启 ssh 服务。 go, 选 set username and password, user name 填写我们要设置用户名。 password 填写我们要设置的登录密码。勾选配置 wifi 热点名,填写我们的 wifi 名称密码填写我们的 wifi 密码。 由于我现在身处在中国,选择 cn 语言设置,选择亚洲上海,稍录成功后就可以直接远程登录。方法二,在桌面新建一个 userkins, 点 txt 文档, 文档内容已经给大家准备好了,直接打开微雪微体,找到登录部分,将内容直接复制进去, 再将这三个文件一起复制到 tf 卡根目录下, 将 tf 卡插到树莓派上,树莓派开机后就自动创建一个登陆名为派密码为 rasparay 的账户。我们在上一期学习了 wenc 远程桌面登录, 估计很多小伙伴已经熟练使用树莓派桌面了。虽然我们可以在树莓派桌面上使用鼠标来点击进入文件夹中,但是鼠标点击修改文件会出现权限不够情况,那是由于这些文件里面存放系统运行的重要数据, 只有最高权限的 root 用户才有权限修改。接下来我们来简单了解下 linax 系统中的 root 用户、普通用户和用户组。 linux 系统支持多个用户在同一时间内登陆,不同用户可以执行不同的任务,并且互不影响。 root 用户是默认的超级用户,用于系统管理、维护任务。 普通用户用于日常事务处理,拥有的权限受到一定限制。用户组是具有相同特征用户的逻辑集合。例如,我们需要让多个用户具有相同的权限,比如查看修改某一个文件的权限。 最好的方式是建立一个组,让这个组具有查看修改此文件的权限,然后将所有需要访问此文件的用户放入这个组中,那么所有用户就具有了和组一样的权限,这就是用户组。当我们登陆数媒派 系统时,默认是普通派用户。切换用户就需要使用苏斗和苏命令。我们在终端输入命令苏斗苏 route 回车运行命令,此时我们就成功切换 route 用户了。 切回普通用户,我们只需输入命令苏派即可。我们学会了如何获得 roof 权限。温馨提示,虽然我们学会了如何获得 rooft 权限,但是 root 权限是不能滥用的哦。 接下来我们正式开始学习常用终端命令,下面是给大家整理的一些常用终端命令,后面会一一给大家介绍。 首先我们学习第一个命令叫做 ls, 它的作用是列出目前工作目录,在 ls 命令后面加一个参数 a, 就可以列出所有目录,包括点开头的隐藏文件也会列出。在 ls 命令后面加一个参数 l, 除了列出文件名称外,亦将文件形态、权限、拥有者、文件大小等资讯详细列出。在参数 l 后面加一个参数 h, 文件大小以容易理解的格式列出,例如四 k。 对于 ls, 三个常用参数就介绍完了。由于每个指令参数很多,我们不可能将其全部背下来。想要了解其他参数的作用,我们可以使用 help 来查看命令用法。 在上面的学习中,我们可以通过 ls 当 lh 来查看文件的权限。每个文件都设定了针对不同用户的访问权限。在不切换 root 用户情况下,可以通过 chm 命令设定文件权限。设定文件权限的方式有两种,使用字母来修改文件权限。文件的基本权限就是三种用户身份,所有者、所属组和其他用户搭配三种权限。读写执行 文件属性分为十小格,第一小格表示文件类型,杠代表文件, d 代表目录, l 代表软链接文件。另外三组每组三格分别表示文件所有者权限、同一组内的权限以及其他用户权限。 ch mod 命令中使用 ugo 分别代表三种身份,还用 a 表示全部的身份。使用字母修改文件全线格式如下, 下面我们来演示一下我们想要修 修改 wishare 文件家的权限。首先使用 lslh 命令查看,显示的是用户组和其他用户没有读写执行权限。我们再终端输入 suday chmodo 加 rw wishare 来增加 wishare 文件家的读写权限, 此时我们发现其他用户已经拥有读写权限。如果我们想要取消 wishare 文件加读写权限,再终端输入 tsutosy etchmontogen rwwayshare 即可。 ch mod 命令使用数字修改文件权限,下面是每个权限代表的数字,我们就以二 w x 二杠 x 二杠杠为例,先将其分成如下三部分,所有者有毒写和执行权限。二 w x 用户 组有读和执行权限二 x, 其他用户只有读权限二。有权限就在对应的表格里面打对号,没有权限就将对应的表格空出来,最后将对号所对应的数字耒加起来,所以此文件对应的数字权限就是七百五十四。 再终端输入 suday zh mark 七五四威 share 使用 lslh 命令查看,此时就成功修改文件权限了。 我们学会了如何使用 zh month 命令修改文件权限。接下来学习切换目录的命令 cd, 再终端输入 cdv share。 此时我们就可以看到成功进入威塞尔这个目录了。如果我们想返回上一个目录,在 cd 后 加上点点就可以了。如果进入两层目录以上,想返回主目录,可以直接使用 cd。 现在我们知道怎么查看和切换目录了,那我们继续学习新建文件和创建目录。使用 touch 命令新建文件终端输入命令 touch test 点 txt, 我们可以使用 ls 验证下。使用 mkdir 命令新建文件夹,再终端输入命令 mkdir user。 如果我们想要新建 user test 多层目录,需要在目录名称加上参数 p, 再终端输入 mkdir gump user e test。 若 user 一目录不存在,则建立一个,我们继续来看下文件的删除、复制和移动命令。使用 cp 命令复制文件或目录 录,在终端输入 cp test 点 txtv share, 我们就将 test 点 txt 文件复制到了 weht share 目录下。使用 mv 命令移动文件终端输入 mv test 点 txtwh share user, 这样就把 test 点 txt 文件成功移动到了 west air user 目录下。使用 rm 命令删除文件或目录。我们想要删除 taste 点 txt 文件,可以直接在终端输入 rm test 点 txt, 我们想要删除 user 这个文件夹,就需要加上参数 rf, 再终端输入 rmrf user rf 参数作用是删除当前目录下所有文件,并且不能够恢复。刚入门小伙伴要谨慎使用,以免误删重要文件。除了一些简单的文件操作,我们也会经常给树莓派安装 软件,使用 apt 命令给树莓派安装软件,例如我们安装 ctrix, 在终端输入 sudoat in stock ctrix 杠外杠外的含义是直接同意进行下载,跳过提示 刚刚安装的 ctrix 软件就可以呈现出黑客帝国代码瀑布的特效。 最后两个命令是关机和重启,一般需要 road 权限。 树莓派的关机是不能直接拔掉电源线的,因为树莓派会将内存作为暂存区。如果直接拔掉电源线,会使一些在内存中的数据没有来得及写入 sd 卡中,从而造成数据的丢 失或是损坏 sd 卡上的数据,造成系统无法启动。此时我们就可以使用终端命令来关机,关机成功后再关闭电源,再终端输入 soda shatdom xnar, 树莓派就会立刻关机。再终端输入苏 do reboot 命令就可以重启树莓派了。 对于 linux 常用命令就介绍到这里,如果您想学习更多的 linux 命令,可以按照我们提供威雪威 p 树莓派入门教程的 linux 操作基础部分练习。 前面我们介绍了在树莓派里面文件的复制、粘贴等操作,如果我们要修改文件的内容,就要用到文本编辑器了。在树莓派里面两个常用的文本编辑器 nano 和 win, 虽然 win 功能强大,但是相对新手来说 win 比较难上手。 nano 是一个 体积小巧,容易上手且功能强大的文本编辑器。在基础教程部分我们就暂时不介绍 whim 了,对 whim 编辑器感兴趣小伙伴可以自己客下练习一下,这里就来聊聊 nano 的使用方法。在树莓派终端输入 sudanano test, 点 txt 就可以打开 test 点 txt 的文件, 如果这个文件不存在, nano 编辑器会自动建立一个。此时我们用 nano 编辑器成功打开了 text, 点 txt 文件,我们来了解下各部分的含义。 顶端这一行显示 nano 编辑器的版本和正在编辑的当前文件名。文件若是被修改,文件名字后面会有一个星号状态,行是底部的第三行显示 nufi 表示这是一个新建立的文件。向上三角符号代表 control, amg 代表 out。 给大 家整理了一些常用的快捷键,想要知道更多更详细的快捷键,可以按下 ctrl 加 g 获取帮助,下面我们动手实践一下。输入威 share, 按下键盘 out 加六复制, ctrl 加优粘贴,可以看到成功复制 vision, 按下 control 加 s 保存,最后按下 ctrl 加 x 退出,这样我们就成功将 we share 写入 test 点 txt 文件了。 nano 常用命令我们就介绍完了,本期视频就到此结束了,我们下期再见。
35微雪电子 09:20查看AI文稿AI文稿
09:20查看AI文稿AI文稿哈喽,大家好,我是 vivo。 欢迎来到由微雪电子打造的 pco 系列教程第二期,拜射 gpl。 上一期我们介绍了 pq 的基础硬件,并实现了 led 的点亮,但是有些小伙伴会问,具体怎么实现的 led 点亮呢?答案是使用了 gpl 外设。 有些敏锐的小伙伴发现我们使用了外设这个词,有人就会好奇,明明我只使用了 rp 二零四零这一块芯片,并没有使用外设呀。这里我们需要了解的概念, 外设全称外部设备,在早期 usb 控制器之类的,而 cpu 并不在一块芯片上,所以说被称之为外部设备,简称外设。 但随着半导体工艺的发展,各种外设被集成到了一块芯片上,但人被称为外设。我们把芯片外部的外设称之为片外外设。 同理芯片内部,但内核之外的外设被称之为片内外设,也就是我们上文说的外设。 现在我们需要真正的了解一下我们的第一个外设。 gpl 能称为通用型输入输出端口,简单的来说, mcu 可以直接控制的引角, mcu 经常通过 gpl 银角与外部器件连接,直线控制、读取或者通讯。 gpl 可以说是大多 触 mcu 最重要的功能,也是与外部连接的主要途径。 我们现在可以看到 rp 二零四零的系统概述图, 不难看到内核可以通过 slo 直接控制 gpl, 但是 spi 等外设需要通过 gpio 才能实现对应的功能。我们点赞程序就是通过控制 gpl 输出高电瓶或低电瓶 进行点亮或者熄灭发光二极管的。我们现在了解一下 gpio 是怎么实现输入输出功能的?现在我们可以看到输出部分有四个部分控制,分别为输出速度, 输出使能输出数据而输出能力。输出速度决定了 gpl 最快的反转速度。输出使能决定了是否输出,输出数据决定了输出电瓶。输出能力决定 gpl 的驱动能力。 输入部分则有三个部分组成,分别为,输入使能输入数据,输入此字 输入使能决定是否能够输入。输入数据为输入 gpl 的电瓶输入此字为是否使用史密特触发器。 这里需要注意点,现阶段的麦克拍摄无法控制输出速度、输出能力而输入池子这三个选项。 根据上述结构,可以将 gpl 的状态分为四类,分别为,开漏输出、悬空输入、上拉输入、下拉输入。 在开始我们正式编程之前,我们需要了解一下我们可能使用到的类或者函数。首先我们看到的是聘类中的构造函数,其作用为根据参数初始化 gpl 并返回。 第一个参数 id 代表 gpio 编号,数值应在零至二十九之间。如果使用 gpio 十三,则应该填写为十三。第二个参数 mod 代表 gpio 模式,可设置为不出。 说实话,输入模式、输出模式、开漏模式。第三个参数铺为使用内部上拉电阻或者下拉电阻, 可设置为上拉、下拉和悬空。注意该参数仅在输入模式下有效。第四个参数为输出数值在输出模式和开漏模式下有效。 我们现在看到拼类的 i n i t 函数起作用为从新出,此画 gpio 参数与拼类的构造函数相同,这里就不一一叙述了。聘类中的 v 六函数作用,在不 填写参数的情况下返回 gpl 端口的数值,在填写参数的情况下,将参数写入 gpl 的端口中。参数可 为零或者一拼列中的特构函数,其作用为在输出或者开漏模式下将端口时进行一次翻转。以上四个模式均用于输出模式或开漏模式。 lolo 和 off。 将端口值设为零。 嗨和嗯将断口直射为一拼内中的 lq 函数为外部中段函数,第一个参数为中段触发毁掉函数, 第二个参数为中段触发,条件可设置为边缘触发或电瓶触发。好的,我们已经对 gpl 硬件和有关函数有了一个大致的了解。 我们现在进入我们的实操部分,我们需要准备的材料如下,按揭牌针的披扣仪、 面包板一个,直插按键一个,直插 led 灯一个,适当组织的直插电阻一个,布班线若干。 这里我们将按键连接在 gpl 十五上,将外部 led 连接到 gpl 十六上,通过一 k 的电阻进行限流。 到了我们的编程环节,是时候给我们的板子注入灵魂了。所以呢,我们已经写好了一个程序,现在对他进行一个详细的讲解。 前面两行分别导入了眉身库中的聘类和优探母库。现在我们看看导入门讯库中聘内的两种方法,前者会将整个魅讯库导入,后者将单独导入门讯库中的聘类,相比前者,后者占用的 内存更小。在这里我们把 gpl 十五设置为了上拉输入模式, gpl 十六和 gpl 二十五设置为了输出模式。 以 gpl 十五也就是巴腾为例,这一行创建了一个 gpl 编号为十五出入模式,并且使用了内部上拉的拼对象,并赋予给了巴腾。 现在我们看到下一段代码,此处将读取 gpl 十五的数值,并判断是否为零,若为零 表示按键按下,则会等待十毫秒重新判断按键是否按下,若还是按下,则开始执行下一步。这里插播一个小知识,有小伙伴知道我们为什么要等待十毫秒后重新判断 按键按下吗?在实际情况中,机械触点断开或者闭合时,由于机械触点的弹性作用,一个按键开关在闭合时不会一下稳定的连接在一起,也不会在断开时一下子断开, 因此在闭合或者断开的瞬间会产生一系列的抖动。为了避免这种现象,则需要进行按键消抖。 硬件消抖和软件消抖均有各自的优缺点,硬件消抖的优点是较少的软件开销,缺点是硬件成本较高。 软件消抖的优点是硬件成本较低,缺点是较多的软件开销。这里我们进行了一个软件消抖及检测,出案件闭合后,执行一个四号码的延迟,让前沿抖动消失后再次检 测按键状态。如果仍保持闭合状态的电瓶,则认为有按键按下才转入按键的处理程序。 这里我们的按键处理程序为,按键按下时, gpl 十六方转, gpl 二十五设为高电频,然后通过微而循环等待按键释放。 等待按键释放后,将会回到这段代码的顶端,并将 gpl 二十五设为低电瓶,然后等待按键再次按下 程序讲解到这里就结束了,我们现在将程序下载到我们的板子上,看一下实际效果吧。 这期的教程就到这里结束了,希望小伙伴们给我们一箭三联,我们下次再见。
100微雪电子 12:05查看AI文稿AI文稿
12:05查看AI文稿AI文稿哈喽,大家好,我是 vivo, 欢迎来到由微水电子打造的皮扣系列教程第五期, uart 上一期我们使用了 adc 和内部温度传感器,读取了银角电压和片内温度,实现了模拟信号转化为数字信号的过程。 到现在为止,我们已经学会了 pwm 和 adc, 这些为我们的 pco 工作在不同的情况下奠定了基础。这一期我们需要学习一下 mcu 是怎么说话的, 既然要说话,就要规定一定的规则或者语法,就像人类的语言分为汉语、英语、德语等。 当然两个人说话还需要指定沟通使用的语言,如果两个人使用的语言并不一致时,是无法沟通的。 mcu 如果要说话也是一样的道理,需要约定一定的规则,这些规则我们称之为通信协议。 mcu 中最常见的通信协议有 uvr t、 iphone c 和 spi。 现在市面上大部分的单片机都有对应的硬件外设, 这里我们为什么要强调硬件外设呢?因为这些通信协议相对简单,我们也可以通过软件来模拟出这些通信协议,实现通信的功能。 今天我们来讲解一下。 uart, 中文全称为通用异步收发传输器,也就是我们俗称的创口, 其为一种通用的创型异步通信协议,其定义了两根数据线,可以实现传双工的收发。刚才我 我已经说了一堆名词,是不是有小伙伴已经被闹晕了呢?这里我们特别讲解一下几个名词的意思。 创型适用于形容每次传输一位元素剧的通讯协议,和创新相对的是并行,适用于形容每次传输多位元素剧的通讯方式。 一步是指通讯双方不需要共同的时钟,也就是接车方不知道发送方什么时候发送。 所以说在发送的信息中需要提示接收方开始接收信息。如开始位,同时在结束时需要有停止位。与异步相对应的词为,同步 是指双方有共同的失踪,常由主机或者同一个失踪员提供。传送工是通讯传输 中的一个数词,与其对应的词有半双弓和单弓。全双弓是指通信允许数据在两个方向上同时传输。半双弓指通信允许数据在两个方向上,但是无法同时传输。 单工是指通讯允许数据向一个方向上传输。 uvit 的工作原理是约定好通讯的波特律,然后将数据一位位的进行传输。现在我们看到 uait 的实序图,其中个位的意义如下, 一、起始位,先发起一个逻辑,零信号代表传输制服的开始。二、数据位,紧接着起始位之后,数据位的个数可以为四、五、六、 七、八,构成一个字符,长采用二十克码,从最低位开始传输,靠时钟定位。三、基友教研位,数据位加上这一位后,使一的个数为偶数或为基数,以来验证数据传输的正确性。 四、停止位,他是一个制服数据的停止标志。停止位可以为一位、一点五位、二位的高电瓶。由于数据在传输线上是定时的,并且每个设备都有自己的时钟,很可能在通讯过程中两台设备出现小小的不同步。 因此停止位不仅表示传输结束,并且提供了矫正时钟的机会。停止位位数越多,不同时钟同步的柔软程度越大,但是传输速率也会越慢。五、空弦位 处于逻辑一的状态,表示当前线路上没有数据传输,因为 it 还有个重要的参数为波特率,是衡量数据传输速率的指标, 表示每秒传输的符号数,例如每八 b 代表一个符号,数据传输数率为一千二百字,每秒波特率为一千二百,波比特率为一千二百乘以八,等于九六零零 b 特每秒。两者的概念很容易搞错, 现在我们看到 rp 二零四零的 uvit 参数。一、收发独立的先录先出存储器。二、可编程的波特律生成器。三、标准的异步通讯位,在发送时添加,在接收时三 除四换,韩服检测。五、可编程的创口接口,五位、六位,七位或者八位六,一位或者两位停止位。七、可编程的硬件流量控制。 硬件流量控制添加了两个银角, rts 和 cts, rts 为输出信号,用于指示本设备准备好接收数据,低电瓶有效。 cts 为输入信号,用于判断是否可以向对方发送数据,低电瓶有效。为什么要添加这两个流量控制阴角呢? 因为两个设备通过创口通讯时,两者的出力速度不同,可能造成数据丢失。如台式机和单片机之间的通讯接收端的接收数据缓冲区已满,此时还 还接收到发送来的数据,可能造成丢失。使用了流控制后,可以有效的避免这种情况的发生。 现在我们看到官方为我们提供的框图,大家是不是第一眼看的眼花缭乱?没关系,我们将其整理为流程图, 这里我们将其分为两个流程图,分别为发送流程图和接收流程图。这里需要注意一点,我们先前说过 usb 是全双工的,说明接收和发送是可以同时进行的,这里只是为了比较好的理解将其拆分。 现在我们看到发送流程图, app 总线可以访问状态控制计算器,并将需要发送的信息纯录发送。先录先出存储器种 波特律生成器从 apb 总线和计算器快中获取波特率分频因子产生内部时钟。 bot 十六频率为波特率的十六倍。 u art 发送器受到状态控制,计算器控制以波特十六为时钟圆, 将发送先路先出存储器中的内容逐个发送,电路先出状态和中断。生成器会根据先路先出存储器生成对应的先路先出标志位和中段信号。 现在我们看到接收流程图, usb 接收器和 usb 发送器一样受到状态控制,计算器控制以波特十六为时钟源,将接收到的信息纯露接收线路先出存储,其中 app 一种线可以通过读取接收线路先出 整首戏过去读取值 微信点。 uvrt 为 uvrt 对象构造函数,起作用为初始化对应通道和影角。 第一个参数 id 为使用 usb 通道口为零或者一。第二个参数巴德瑞为使用波特律, 第三个参数 betus 为数据,为长度,现阶段仅八位有效。第四个参数 prote 为是否使用基友交应位。 第五个参数 stop 为停止位长度。第六个和第七个参数为 tx 和 ix 为收发银角,因为拼对象。 usb 函数用于检测当前接收缓冲 区是否有数据,接收缓冲区有数据时返回一,否则返回零。 uirt 瑞的函数用于读取字符创。 nba 的参数如果指定了 nbax, 得最多读取这么多个字节,否则尽可能多的读取数据。 red like 函数读取一行,以换行符为结束标志。 red 音兔函数将读取的字符创存入指定的缓存中。参数 buff 用于指定缓存 nbax 和上文中瑞的函数 nbax 参数作用一致。 rit 函数用于发送字不创并返回发送的字。结束 参数 buff 为需要发送的字符创。赛德布瑞克函数在总线上发出停止状态, 拉低总线十三个比特时间。 这里我们需要一块 pq evo bod, 还有两根 usb two macousb 数据线。 这里我们可以看到 p 口 ewowd 的原理图,上面 gpl 零和 gpl 一两个银角连接到了绑载 usb twouvit 芯片 cp 二幺零二的 rxd 和 txd, 这是我们需要使用 cp 二幺零二和 p 口进行 usb 通讯。终于到了我们的编程环节, 前面两行我们导入了对应的库,然后我们初始化了 usb 通道零波特率为幺幺五二零零,使用了 gpl 零和 gpl 一分别作为 tst 和 rxd。 银角用于 uvit 通讯,并且初始化了 gpl 二十五作为输出。银角用于驱动绑载 led 灯,然后通过 uvrt 发出对应的提示信息。 在循环中,我们使用 urt 类的 a 函数判断是否收到信息,然后通过 red 函数获取接收到的数据,判断读取数据是否为字符一或者字符零。 如果为字符一或者字符零,则打开或者关闭 led 灯。纺织则重新输出提示信息。 现在我们进入最后一个环节实操环节。这里我们使用到两根麦克 usb 数据线,将 pcco 和 pco evoword 连接到电脑上。这里 我们已经安装好了 cp 二幺零二的驱动。打开我们的创口助手。当我们插上 pq evo 的 创口助手上会刷新出新的科目口。科目口描述为 cd ctrlipscp 二幺零叉 usb twou airtbreat 就是我们 cp 二幺零二的科目口了。现在我们选择波特率为幺幺五二零零并打开创口。 如果波特律选择不对,则会导致无法通讯。然后我们打开搜拟并运行我们的程序。 在创口助手中我们可以看到对应的提示信息。现在我们分别输入零或者一,可以看看 p 口上面的 led 灯是否打开或者关闭。如果我们输入 零或者一之外的字符,则会提示让我们输入零或者一。 喜欢这个视频的小伙伴,欢迎你们一件三联,我们下期再见。
138微雪电子 02:17查看AI文稿AI文稿
02:17查看AI文稿AI文稿设置静态 ip 地址配置静态 ip 地址大致分三个步骤,第一步,去查找树莓派连接网络的默认网关, 在终端输入 root 杠 n, 我们这里输煤派连接网络的默认网关是 192 168 0 1。 第二,不要确定好分配给树莓派的 ip 地址,这里给树莓派分配固定 ip 地址要遵循两个规则, 第一个规则是静态 ip 地址与路由器网段一致,第二个规则是不能与路由器分配出去的 ip 地址发生冲突,否则树煤派可能无法正常联网。 举个例子,首先这个数媒派的 ip 地址是幺九二点幺六八点零点幺零五,那么静态 ip 地址设置就要在 192 168 0 0 到 255 这个范围里面,这样我们就遵循第一个规则。接着我们查看路由器分配出的 ip 地址,那么显然我们设置树莓派静态 ip 地址就不能用这三个 ip 地址,这里可以直接使用当前路由器给树莓派分配的 ip 地址。 第三步,修改树莓派 dhcp 配置文件,修改后重启,在树莓派中端输入指令, sudanano etc dhcpcd c o n n 回车,在文件末尾添加我们的配置信息。 需要添加配置信息,我已经给大家准备好了模板打开,我们提供微雪 vp 树莓派入门教程,找到配置静态 ip 部分,直接复制就好了。 江苏没 派的 ip 地址换成当前 ip 地址, 192 168 0 105, 将默认网关换成刚刚数媒派连接网络的的默认网官 192 168 0 1, ctrl 加 s 保存, ctrl 加 x 退出,最后重启树莓派,这样就完成了。给树莓派配置静态 ip 地址, 下次登录数媒派就可以直接使用这个静态 ip 地址了。好了,我们这一期视频就到这里结束了,我们下期再见。
89微雪电子 09:30查看AI文稿AI文稿
09:30查看AI文稿AI文稿在本视频中,我们将循序渐进地介绍如何对 vivo 进行二次开发,并编辑自定义的动作。 首先打开一个页面,访问 vivo 的 vicky 页面,在这里你可以找到环境配置过程中所需要下载的资料。点击这个连接,打开 are doino id 的下载界面,选择适合自己电脑的版本,下载并安装 are doino id, 等待安装完成。安装过程中,如果询问是否要安装一些驱动,也最好一起安装上。 安装完成后,运行 arduino id, 需要允许他联网,他会自动检查安装的库有没有需要更新的。接下来为 arduino id 添加 esp 三二开发版,点击文件编号设置复制 vp 页面的 esp 三 二开发版链接粘贴到这里,点击 ok, 确认下载 wiki 页面的 packages 压缩包完成后解压缩,记住解压后的文件位置,打开 c 盘 users, 选择你的用户名文件夹, app data 需要显示隐藏文件 local arduino 十五 packages 保留这个窗口。另外再打开刚才解压好的文件夹,将解压出来的 packages 文件内的 e s p 三二文件夹移动到 r do e no 十五内的 packages 文件夹中。 接下来安装依赖酷下载 libraries 压缩包,打开 arduino id 文件编号设置,查看酷的路径,打开这个文件夹,解压 libraries, 并记住解压后的文件位置。将解压出来的文件移动到 到 arduino 的 libraries 文件夹中。下载 vivo 的开源程序 arduino, 然后解压,记住解压后的文件位置,最小化 week 页面,关闭之前打开的 arduino id, 打开刚才解压的文件,双击运行 vivo eno 文件,这将会打开 arduino id, 这就是组成 vivo esp 三二内里程的全部代码了。其中 vivo eno 中有一些 a p i 的介绍,它包含了一些多线程的功能以及主循环。 initialization configuration 中定义了一些外围设备的引脚定义和模块初始化函数等内容。 preferences configuration 中包含了一些对 m v s 区操作的函数,用于吊电后保存。舵机校准参数。 server control 中式 这个产品最核心的部分包含了舵机角度控制、速度曲线控制、逆运洞穴以及步态生成等函数。 webpage h 是 web 端地控制页面,主要使用了 html 和 javascript 来编写,你可以更改这个页面来进行交互方面的二次开发。 app 下划线 h t t p d c p p 包含了与网络相关的设置。 default 下划线 wifi 下划线 mode 的数值为一时, vivo 开机后会自动建立热点,你可以将 default 下划线 wifi 下划线 mode 的数值由一更改为二, 并且在这里填写你的 wifi 名称和密码,这样 vivo 在开机后就会自动连接到这个 wifi。 接下来介绍如何对产品进行二次开发。这里使用了 vi vivo 中包含的函数,所以只需要更改 vivo eno 这个文件即可。为了更清晰直观地展现代码逻辑,我们后续代码介绍部分不再使用录屏方式来制作教程。 首先我们写一个简单的历程来控制 r g b 灯光闪烁。浏览到 vigo eno 的后部分。前部分的代码含义会有后续教程来介绍。 look 内的函数为主循环需要执行的函数分别负责机器人动作控制、传感器信息更新和线控调试模式检测。把这三个函数注视掉,在每行函数前面加两个斜杠,这句函数就不会被执行。 注视掉这三行函数后,我们就可以在 look 中添加需要让它下次开机后自动执行的函数了。写入 如下代码,这行代码的含义是让林浩灯发光,发光,颜色又这三个数字来定义,三个的范围都是零杠二百五十五,代表着红绿蓝三种颜色通道的亮度。至于具体是哪个数字对应哪个通道,会随产品批次不同而改变。 当三个颜色通道的数值相等时,颜色为白色,数值越大亮度越大,数值全部为零时不发光。 这行代码的含义是让一号灯发光。接下来设置一个延迟时间,一千的单位是毫秒,一千毫秒为一秒。 然后再给两个灯设置一个不一样的颜色,同样也是延迟一秒钟,这样灯光每种颜色会亮一秒钟,并且无限循环下去。接下来上传产品程序到 e sp 三二,首先点开 arduino id 左上角的菜单,看下已有的炕口编号,一会连接产品与电脑后,新出现的炕口就是对应 vivo 的连接 vivo 与电脑。 再次点开 arduino id 左上角的菜单,选择相比刚才没连接时多出来的这个 com 口,然后选择开发版类型,我们这里搜索 esp 三二 dead module, 选择它。其他与上传程序相关的设置如下,注意, psram 一定要选择 enabled。 本次教程不涉及摄像头,所以没关系,未来涉及到摄像头或者需要将产品原始历程上传到 esp 三二时,有可能会因为没有选择 enable 而导致摄像头画面闪黑色。设置好后, 点击左上角的上传程序,等待上传完成。上传完成后,机器人会自动重启,并且运行这几条改变灯光颜色的代码。效果如下,接下来的教程来让机器人运动。使用坐标点来控制 vivo 的腿部运动。 由于 vigo 的腿部连杆结构比较复杂,我们需要使用逆运动学函数来控制腿部末端点的位置,进而控制腿部运动。 我们先控制一条腿,分别沿三个坐标轴来运动。为了避免目标位置超过腿部连杆支持的范围,我们基于基础位置来进行加减, 将坐标点 walk extended x walk hat walk extended z 作为基础位置,这个位置的腿部姿态如图所示。调用该函数来控制一号 靠腿末端点运动到基础位置前面三十毫米的位置,高度和侧向坐标不变,但是单独调用该函数并不能让腿动起来,还需要调用这个函数腿才可以动作延迟一秒钟再进行下一个动作。 调用该函数来移动到基础位置后面三十毫米的位置,使用同样的方式来控制末端点,分别在高度轴和侧向轴动作上传程序。 这里需要注意涉及到舵机运动的历程,需要将开关打开才可以动作。该历程的运动效果是这样的, 接下来控制其余的腿一起动作。逻辑上与上一个历程相同,每条腿的逆运动 学计算完毕后,一定要调用这个函数来让全部腿开始动作上传程序。该历程的运动效果是这样的,接下来介绍速度曲线控制函数。速度曲线控制的目的是为了让机器人的动作看起来更加平滑, 我们可以看到如图所示的这个白点,让他从 a 运动到 b。 首先这个是没有速度曲线的动作启停都比较突然,看起来机械感强,不自然, 这里是带有平滑。速度曲线控制的动作启停看起来自然的多。我们用来控制速度曲线的函数是 best control, 它需要三个参数,分别是起始值、目标值 和位置比例。位置比例参数的取值范围为零至一,当位置比例为零时,函数的反 回值为起始值。当位置比例为一时,返回值为目标值。当位置比例参数以固定的不符和时间从零到一变化时,函数的返回值变化如下图曲线所示。 接下来使用速度曲线函数来控制一号腿的末端点,由前向后运动,使用负二循环来生成位置比例参数传递给速度曲线函数,每次循环唉值增加零点零一,每次动作延迟一毫秒。 上传程序,该历程的运动效果是这样的,可以看到在从前到后的运动过程,速度的变化比较平滑。最后,让机器人表演握手的动作代码如图所示,你也基于前面所学到的知识,再去设计其他有趣的自定义动作。关注我 们后续会更新更多教程,带你从零开始开发机器人。
89微雪电子 01:02查看AI文稿AI文稿
01:02查看AI文稿AI文稿哈喽,大家好,欢迎来到由微雪电子打造的树莓派系列教程第一期,树莓派的入门教程。树莓派其实一款只有信用卡大小的计算机,由英国的树莓派基金会所开发, 初中是为了促进青少年学生的计算机编程教育,从 2012 年发布以来,受到了很多学生、业余智能硬件爱好者、计算机发烧友等群体的追捧,十年来销量达 4600 万台。 树莓派可以应用在我们生活的各个方面,就比如说医疗器械。哥伦比亚的一个团队尝试树莓派作为呼吸机主控来帮助病人调节呼吸。树莓派官方推荐系统是 raspberry pios, 这是一款基于 deb linex 的树莓派专用系统,适用于树莓派所有的型号。除此之外,树莓派还支持许多操作系统。
392微雪电子 01:39查看AI文稿AI文稿
01:39查看AI文稿AI文稿在上一期内容中,我们可以总结,想要控制树煤派有两种方法,第一种,连接鼠标键盘显示器控制树煤派。 第二种不需要鼠标键盘显示器外设使用电脑通过无线网络直接控制数煤派。对于许多小伙伴来说,配备齐全的外设比较麻烦,所以很多人都会选择第二种方法。 那这期视频我们系统学习远程登录数媒派,带你一次性解决数媒派的远程登录问题。 有的小伙伴听到这里就会想,我会啦!上一期已经学过如何使用 party 登录啦!虽然上一期我们已经学过如何使用 party 登录, party 使用起来简单,对初学者非常友好,但同时存在一些不足。下面给小伙伴推荐一款免费好用的登录软件 mobster, 我们可以对两款软件做一个简单的对比。 party 优点,最简单的 ssh 工具,无需安装,支持多系统版本,下载后就可以直接使用。缺点, 文件的上传和下载比较麻烦,多 session 绘画使用不方便。 mobstone 优点, 一,下载后就可以直接使用,无需安装。二、自动登录功能,传输文件方便。三、功能十分强大,支持 ssh、 ftp 串口、 x server 等功能。四、支持标签切换也十分方便。五、众多快捷键操作方便。 缺点,只支持 windows 系统。下面我们就来学习一下功能强大的远程登录软件 mobster。
76微雪电子 09:09查看AI文稿AI文稿
09:09查看AI文稿AI文稿欢迎收看音响测量软件极速入门教程 smart 七极简指南。大家好,我是罗维,这是第九集关于测量一个音箱的九个基本操作步骤, 这九个步骤分别是,一、线路连接二、查看声卡是否正常配件。三、建立 tf 测量项目。四、粉皂输出接口的设置。五、检查返回信号和测量信号。六、将粉皂送入一支音箱七、插入延时补偿八、保存曲线九、关闭粉皂。现在进行的是第一个操作步骤,线路连接, 将一支有缘音箱连接到调音台,调音台上面所有的推子都是拉下来的,然后这里准备了一张声卡,声卡已经连到电脑了,用一条大三星转大三星的线连接声卡的输出任何一个通道和声卡的输入。二、通 用一条大三星转卡农工的线连接声卡的另外一个输出通道和调音卡的输入通道。 用一条卡农线连接测量话筒,还有声卡的输入一通道,并且呢要打开声卡的换向电源。 现在我们来拍手 检查一下信号灯跳不跳,现在呢已经进行到了第二步,就是检查声卡是否正常的配接。 首先我们在 smart 软件里面点击 offices, 然后呢找到第二个选项, offiddysopchass, 就是音频设备选项,进入到这样一个对话框, 他有两个列表,输入设备,输出设备,在这个后面我们注意到他的状态, 如果显示 ok 的话呢,证明是可以用的,显示一个红色的 n 杠 c 就代表根本就不能用,就是这些都是用不了的,用鼠标的滚轮来滑动,他可以找到里面出现 ok 的字样并不多, 因为这些声卡我根本就没有接,现在唯独接了一张柏琳达的 usb, 可以在最后有一个选项看到出现了一个 ok 的字样, 然后前面是 v 五,跟着一个乱码括号,二杠 umc 二零二 hd 幺九二 k, 这个呢就是我当 当前接到的一张百灵达的声卡,他的型号就叫做 umc 二零二 hd, 注意这里千万不要打勾,如果你打上勾的话呢,那么你就选不上了,他打勾的意思就是隐藏掉, 不打勾的话才是代表已经被选上了,现在我们点击 ok 就可以了。然后我们可以看到这样一个对话框弹出来,他说没有找到设备啊,请确保那个设备呢已经正常的连接,而且符合当前所需要的一个采样率, 我们就不要管他了,点击 ok 就好了,因为我们根本就还没有去建立测量项目,对吗?我们看到这些测量项目就是上一次建立的,这一次呢我们又换了一张声卡,所以他会弹出这样的对话框,这是正 长的,现在进行到了第三步,就是建立 tf 测量项目,首先我们点击 facto 传输函数, 就会看到这样一个画面,分为上下两个框子,接着呢,我们点击锤子和扳手交叉的符号,还是回到了这样一个配置的页面。 接着呢,我们是在穿斯福方克绳里面点击新建 tf 迈士门诊,然后弹出这样一个对话框,我们输入他的名字,比如说 umc, 接下来呢就是找 dws, 就是声卡,现在我们用的是这个,要记住这个名字。 v 五一个乱码,然后二杠 umc 二零二 sd, 如果这个时候呢 把软件退出,把声卡插到另外一个 usb 接口,那么前面这个二呢,可能就会变成一啊,或者变成三啊,或者是没有了,所以这个时候我们必须要在前面去查看这个声卡前面的序号是多少。接下来就是测量通道选择左, 然后参考通道选择右,然后点击 ok, 你就可以在这里看到多出一个测量项目,这边的设置呢,请参考我当前的设置,然后点击 ok, 现在进行到了第四步,就是粉皂的输出接口设置,首先点击这个地方弹出这个对话框,然后在 dys 这里选择播放的声卡, 跟前面是一样的选择,就是 v 五,前面是一个乱码,然后二杠 umc 二零二 sd 妹,你这里选择左,奥克斯这里选择右,点击 ok 就可以了。接下来我们到了第五个操作步骤,就是检查返回信号,还有测量信号,我们点击这个小三角形, 你可以看到 m, 在这里跳 m 就是测量信号,证明我们的测量信号是正常的了,接下来再检查这个返回信号,也就是二,他并没有跳,这个时候呢我们点击播放粉灶,然后呢还是没有跳, 我们终于找到了原音,首先点一下小喇叭,点击右键声音, 然后点击播放。接下来我们找到 umc 二零二 hd, 点击右键属性,点击高级,然后呢把它调成二十四位四十四点一赫兹,点击确定,接下来点击录制, 找到 umc 二零二 hd, 点击右键属性在高级,这里也是两通到二十四位四四幺零零赫兹,确定,点击确定。 接下来我们检查一下 strat 的设置,好的 dyas, 仍然回到这个界面,我们可以看到他也是四四幺零零赫兹,后面呢也是二十四位,我们保证他跟小喇叭里面的设置是完全一样的就可以了,当然这就是威武驱动下必须要检查的一些事情, 如果你使用的是 a 四 l 驱动的话呢,这些步骤就可以省掉了。然后点击应用, ok, ok, 接下来还会弹出这个框子,我们不要理他,点击 ok 就可以了。然后呢再一次点击三角形, 再一次点击 pinglax, 我们就可以发现下面这个条子会亮起来,然后我们再一次点击 pinglax, 就发现他不亮了。这是因为返回的通道呢,是用一条线直接从输出插回到输入, 所以只要输出有声音了,那么输入就可以看到有信号了。接下来我们可以看到声卡上面这个输出音量旋钮,假如说把它关掉的话呢,同样输入也没有信号了。现在我再一次把它打开,我们把它开到百分之八十的位置,然后声卡的输入通道 有个音量旋钮,其中输入二音量旋钮呢,控制的就是我们看到的这个二通道,也就是参考通道,你可以把这个信号调整到一定的高度,比如说蓝色跟黄色的交界处。 然后呢我们再看到声卡的输入一通道,控制的就是这个测量话筒进来的信号大小,当然现在我音箱还没有开,等音箱一开的话呢,这个条子就不知道多少了,所以我们可以开到一个偏小的值, 比如说这个位置,等下音箱一开的话,这个信号就会充起来了,现在我们把粉皂送入到一只音箱,首先这一路呢我们看一下他的电瓶,通过电来调节这 录的粉皂的电瓶调到一个合适的状态,现在把主输出的推子推起来,粉皂呢发送到主输出按键按下去,然后慢慢推起来。
1909罗维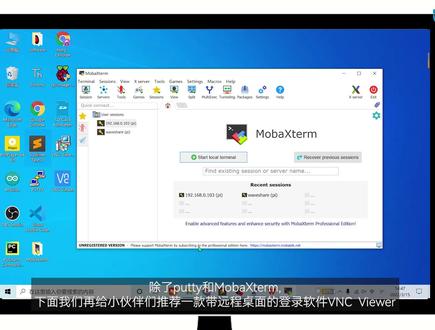 01:48查看AI文稿AI文稿
01:48查看AI文稿AI文稿除了 party 和 mobstone, 下面我们再给小伙伴们推荐一款带远程桌面的登录软件 vnc viewer。 使用 vnc viewer 登录树莓派,大致分为三个步骤,第一步,我们需要让树莓派开启 vnc server, 我们在终端输入指令 recipe 杠啃 fake, 按下回车确认,按下键盘的下键,选择 interface options, 选择 vnc, 选择 yes, 选择 ok, 按下键盘上的向右方向键,选择 finish。 此时我们就成功开启树莓派的 vnc server 了。第二步,在我们的电脑上安装 vnc viewer, 接着打开,我们提供威雪威 p 树莓派入门教程,找到软件部分, 直接点击下载 vnc vivo 安装包,下载完成后点击安装,点击 ok, 点击 next, 勾选 i accept, 默认安装在 c 盘,若自己要修改安装路径,点击 bros 修改即可。点击 install 等待进度条结束安装完成。 第三步,我们使用 vnc viewer 登录数媒派,在电脑上打开 vinc viewer, 在 enter avnc server address or search 框中输入数媒派的 ip 地址,点击 continue, 我们勾选 remember password, 在 user name 填写默认登录名为派,在 password 填写默认密码,默认为 raspberry。 输入完成后点击 ok, 我们就可以看到数媒派的界面了,下次登录就可以不用输入登录名和密码,直接点击历史标签登录了。
303微雪电子 16:15查看AI文稿AI文稿
16:15查看AI文稿AI文稿哈喽,大家好,我是 vivo, 欢迎来到微雪电子打造的 pco 系列教程第一期 pco 的基础介绍。 pco 是苏门派基金会最新发布的 mcu 开发版,其上搭载了自行研发的 mcurp 二零四零, 我们现在来了解一下皮扣的外观。皮扣长五十一毫米,宽二十一毫米,板厚一毫米。 pcb 使用了成精工艺,所有银角都做了半孔设计,既可以焊接二点五四的排针,也可以直接焊接在主板上。 两个二点五四间距的二十片排针孔位横向均距为十七点七八毫米,也就是可以直接安装在面包板上面。 让我们来了解一下 pq 的基础硬件吧, 这里有几个重点我们需要了解一下,绑载按钮并非复位按钮,而是启动选择按钮, 按钮未按下时, mcu 复位或者上电则会从 plus 启动。如果按钮按一下, mcu 复位或者上电则会进入 uf 二下载模式。这里不得不吐槽一下说明。还有官方为什么不增加一个复位 按钮呢?导致每次下载 usb 文件时需要重新连接 usb 进行一个上电操作,而不能使用乱搅喂直接进行一个复位。嗯, p 口使用的 flax 为华邦电子的 w 二五 q 幺六片的空间为二 mb, 但是 rp 二零四零最大支持十六 mb, 也就是意味着后续的项目需要更大的 vh 空间时,我们可以进行更换更大的 vs p 扣的金证使用了十二兆金证,如果后续使用 rp 二零四零进行开发,并且要求低成本、高性能, 并且没有非常严格的持续要求,可以使用片内的 rc 诊断,或者通过 gpio 从外部输入其他 的时钟信号,可以有效的控制成本。基础的硬件我们就先了解了,这里 接下来我们了解一下劈扣的生态圈,嗯,没错,就是生态圈。也许有人会问,才出来几个星期的板子或者芯片能有什么生态圈? 假如你使用过素梅派系列的产品,你就会知道素梅派的生态圈是多么的丰富。在我个人看来,在同类的产品中,可以说素梅派做到了地表最强生态圈。 背靠着这么强大的苏梅派生态圈, p 口自然可以继承苏梅派很大一部分生态和创客玩家甚至可以说是粉丝的关注。有些人会觉得奇怪,我为什么会觉得 p 口能够继承苏梅派的生态仅仅是一个 m cu? 不不不,当你了解了 rp 二零四零这款 mcu 的命名规则后,你会发现这绝对不仅是一个 mcu, 而是一个系列的 mcu。 让我们了解一下 rp 二零四零的命名规则吧。 二 p 代表厂商名 yesberry 的缩写。第一个数字二代表着核心数, 第二个数字零代表着核心架构为阿姆克特斯 m 零系列,准确的说是使用了阿姆克特斯林 plus, 是阿姆系列最省电的核心之一。第三个数字四代表 ram 为二百六十四 kb。 第四个数字零代表内部没有分意思性存储系。看我命名 规则,大家也可以感受到,苏门派官方对产品有个比较明确的规划,也说明在不久的将来,苏门派官方还会推出更多的 mcu, 搭建出更好的生态圈。我相信苏门派官方是有能力做好这一点的。 pco 现支持两种软件开发环境,分别为麦克派审和 c 或 c 加加,均由官方提供并维护。 rtstry 的官方已经成功的在 pq 上运行了, rtstry 的还有阿多肉的 ceo 和创始人,在其官网上都说要将阿多肉的内核移植到 rp 二零四零上。这些仅仅是批扣发布才几个星期的情况下,各位大佬对批扣的 反应,相信后续还会有更多的其他软件开发环境进行支持。 让我们对比一下类似开发版的性能吧。在基础性能上,不仅打包了阿多诺乌诺阿三,也碾压了麦克币特飞鄂。说到这里,小伙伴们是不心动了呀,但是摸摸自己干瘪的钱包,真想说一句,买不起,买不起,嗯, 但是你真的知道他的价格吗?他既不是阿多诺乌诺二三的二十三刀,也不是迈克贝特 v 二的十五刀, 而仅仅需要四刀,折算成人民币仅需三十至四十元之间两顿食堂放菜的价格。能做到这个价格,咱们还要啥自行车 车呀。 我们现在进行一个批扣原理图的讲解, 我们将会分成几个部分,分别对原理图进行一个详细的讲解。我们现在看到电源部分 啊,正常情况下呢,麦克 usb 接口会通过麦克 usb 数据线连接到 pcg 或者充尾派的 usb 接口上面,也就是说 vbox 正常情况下是一个五伏零点五安的电源输入, 经过第一消特机二极光,会有一个零点一伏至零点二伏的压降,也就是说威森斯特的电压在四点八伏左右,威斯斯特会经过一个 c 一陶瓷电容器输入到 rt 六幺五零 b 杠三三,这是一 个 dcdc 升降压转换芯片,这个 dcdc 升降压转换芯片呢,他的输入范围为一点八伏至五点五伏,输出为三点三伏, 其中三点三伏 en 这个脚视为使能脚正常情况下通过二二落上拉到 vs 四等,此时 dcdc 芯片工作。但是呢,我们可以通过三点三伏 en 这个脚位进行一个下拉,使其光断三点三伏电源。 另外, ps 脚位默认是接地的,通过二八落下拉到地,此时呢, dcdc 芯片工作在 pfm 模式下,这个模式下的转换效率比较高,我们也可以通过 gpio 二十三角进行一个上拉,使其工作 在一个 pwm 模式下。这个模式下呢,会导致他的效率变低,但是呢,他的文波会变小 呃,官方为我们提供了三种供电方式,我们可以安全的为数目派配扣进行一个供电,完全取决于你的选择。我们可以通过设备本身的麦克 usb 连接器为数目派配扣供电,就像我们的图一一样。 然后呢,我们也可以通过 vbox 银角进行一个供电,输入的是五伏,我们还可以使用 vcs 等银角进行供电,这个输入电压可以由一点八伏至五点五伏输入。 官方考虑到我们可能会使用第二电源的供电方式,也为我们提供了三种供电电源的 使用方法。上图呢,是一个最简单的电路图。第二电源经过一个消特机二极光连接到 vs, 但是他有个缺点,第二电源要跟 vbox 一样,要经过一个消特机二极光损失一部分的能源,从而降低整体的电源的效率。 有人说为什么要加上这个二极管,直接连上去不行吗?最主要是防止两个电源的电压不一致,导致电源倒灌入某一个电压较低的电源中,导致元器件损坏。 我们现在看到的是顺派官方为我们提供的第二种电路,这个电路呢,相比之前那个电路呢?他会做到一个,当 vs 被移除的时候,他会构成一个理想二极管电路,他的组织就会变得非常的小。呃, 双方给出的数据是他使用的 pm box 的广,最大压降的是零点九伏,阻值大约为零点一欧。 我们现在看一下第三种方案,使用电池来供电,总体方案呢,跟第二种是没什么差别的。官方友情提示,注意电池上最好加上电池保护芯片或者保护板,否则不排除嘣的可能性。 我们接下来会对几个重要的点进行一个讲解,芯片出来的 usb 角必须要串联两个二十七欧的电阻连接到外部,不能直接连接 adc 的基准电压,默认是用板子上的三点三伏进行一个提供,但是我们也可以通过外接三伏基准电源进行一个调试。官方建议我们不要 低于三伏,这也是内部核心供电稳压管的输入端,为了稳定的电压,我们需要适当的加大。然后我们这里使用的是二点二微法的滤波电容。 iovdd, 这是一个 gb io 的供电,我们外围都使用了一百纳法的电容进行一个滤波。 dvdd 是内部核心的供电,使用一点衣服供电,也可以使用外部的电源进行供电。 usb vdd, usb 全速接口的供电,使用三点三伏供电。 看到我们的波斯特按钮和 flige 波斯特按钮呢,是一个非复位按钮,而是启动选择按钮,按钮未按下时, mcu 复位或者闪电则会从 flag 启动 按钮,按下时 mcu 复位或者上电则会进入 uf 二下载模式。使用的 flax 呢是华邦电子的 w 二五 q 幺六,具体的型号讲解呢,我们就不进行详细的讲解了,我们有兴趣的同学可以自己自行观看一下。 好,我们现在看到时钟电路,我们这里唯一需要注意的一点是二十四,二十四适用于限流,防止过流导致精正的寿命减少或者损坏。 我们现在一看到我们的 adc 采样电路,二五二六风压得到三分之一的 vc 四筒,通过一个 n 勾到的猫屎管,这里的 n 勾到猫屎管及到当 vc 四筒有电压,三点三伏被切断,防止 vc 四筒 电流泄露到三点三伏的网络中。 led 电路,这里的 led 电路呢,也没有什么好讲的,阿三就是起到一个限流电阻的作用,这是第八格的引脚引出,这是我们四十拼引脚的引出, 让我们进入下一个环节实操阶段。众所周知,点灯程序作为学习所有开合版的第一个程序,就像学习所有编程语言都是先学习哈喽 word 一样,对着程序员有特殊的意义。 现在我们打开了素面派的官网,然后选择硬件,然后选择我们要使用的皮扣,然后开始,然后我们可以去下载他的 麦克拍成的固件,然后我们点击下载,然后我们这边就取消一下下载,因为我们已经下载过了。我们打开我们的所在的文件夹,按照官方的方法进行一个连接, 然后上电以后,他会自动出现一个类似于优盘的东西,然后我们把其他拖进去,我们把 ufo 文件拖进去以后,他会自动消失掉, 这时候他就会自动运行麦克拍摄的部件了。我们现在打开了 soney 的官网 songy 点 org, 根据你自己的操作系统下载, 我们已经下载完成了。打开索尼, 然后一路点奈克斯就行了。我们需要创建一个图标在桌面上,这根据你自己的需求进行一个选择吧,然后等待安装完成即可。 好,我们的索尼已经安装完成了,我们刚才已经安装好了索尼。 然后我们现在需要安装一下 rendy 的插件。官方会为我们提供一个 songy 的插件。我们需要找到 sonep 口,然后我们需要点击他的 redes, 我们选择对应的插件,然后我们已经安装好了。我们只需要打开桌椅,进行一个管理插件, 从本地文件安装找到我们的插件文件,我们这里进行一个安装,然后等待片刻,记好。 我们需要选择一下变异器,然后我们要选择到 maco plass sbapple, 点击确认,他会默认,就自动会连接到开扣上面。然后我们接下来就是编程了。我们现在已经写好了一个配扣的程序,然后我们现在将其保存为 保存到配扣上面,然后我们选择 man 点 p y 进行一个保存,覆盖掉它。 我们之前已经写上去一个程序,所以说我们会覆盖掉,然后我们这个程序呢会让 led 每一秒钟进行一个翻转,我们点击运行,这时候我们的配口就会运行 每一秒钟让 led 翻转一次的程序了。我们再说一下怎么使用 c 来进行一个开口的操作, 官方很贴心的为我们已经提供了一个布林克的 ufo 文件,我们只需要直接下载他的 ufo 文件,就可以直接进行一个点灯的操作。我们这边已经下载完成了,我们只 需要将 pco 上电进入 ufo 下载模式,然后将 ufo 文件拖入,此时 pco 就会自动进入一个闪烁的状态。 好的,我们现在完成了麦克拍摄和 c 的点灯程序,这期视频就到这里结束了,我们下期再见。
263微雪电子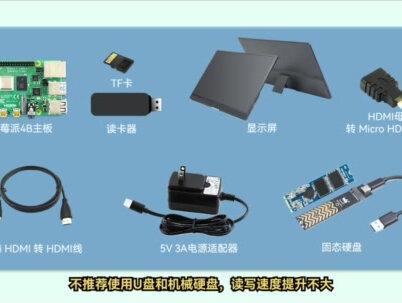 03:07查看AI文稿AI文稿
03:07查看AI文稿AI文稿欢迎来到由微雪电子打造的树莓派系列教程第六期树莓派的 usb 启动我们在日常使用树莓派的时候,通常将系统安装在 tf 卡上, 由于 tf 卡读写速度相对比较慢,对性能就会有影响。我们可以将高速的固态硬盘通过 usb 接口来连接树莓派,使用 usb 启动对树莓派的性能会有较大的提升。 下面就来介绍下两种 usb 的启动方法。使用 rasparai pie imager 设置 usb 启动。使用 raspai gunfi 设置 usb 启动。 准备工作树莓派四 b 主板至少八 gdpx 卡和读卡器,带有 hdmi 接口的电脑显示器或电视 hdmi 母口传 micro hdmi 功口 minih dmi 转 hdmi 线五福三安电源适配器带有 usb 转接口的固态硬盘不推荐使用优盘和机械硬盘,读写速度提升不大。 使用 rasparapi imager 设置 usb 启动,给树莓派烧录引导程序。将 tx 卡插入读卡器连接电脑,打开 rasparappai image 软件,选择操作系统下的 miss laneysutility images, 选择 boot loader, 选择引导模式。这里我们选择 usb book, 即 usb 启动, 等待引导程序烧录完成后,我们将 tf 卡插到树莓派上开机,第一次开机需要耐心等待,当绿色 led 将以稳定模式闪烁,显示屏将成绿色, 此时关闭树莓派,并取出 tf 卡给固态硬盘安装树莓派系统,打开 win 三二 disc imager 或者 raspberry pi image 烧录镜像过程可以参考第三期视频的开头。安装完成系统后, 将固态硬盘插入树莓派的 usb 三点零接口,等待开机成功就从硬盘启动树莓派系统了。 使用 respect 设置 usb 启动,先将树莓派系统烧录到 tf 卡上,烧录过程省略 a few moments later, 烧录完 完成,将 tf 卡插到树莓派上,开机,打开树莓派终端,输入 sudoraspec gunfig 回车确认,选择 advance options, 选择 bootloader order, 选择 usb 启动。当提示 usb 为默认启动设备时,按下回车键确认,选择 finish 重启树莓派,等待开机成功就从硬盘启动树莓派系统了。 欢迎小伙伴留言提问,教程制作不易,记得点个赞哟,我们下期再见!
186微雪电子 03:00查看AI文稿AI文稿
03:00查看AI文稿AI文稿本次为您带来威雪电子 jackson tx 二 nx 开发套件。套件基于 txrnx 核心模组设计, 是 jackson tx 二系列的最新产品,是英伟达计 jackson nano 之后入门级嵌入市和边缘系列。产品的右翼星座,算率高达一点三三 t flocks 是 jackson nano 的二点五倍。模组采用 nvidia pascal 架构,配有二百五十六个 nvidiaco 的核心和四 gb 内存版,在十六 g 的 emmc 可用于系统存储,功率低至七点五瓦。凭借低功率、高性能的优势, 让 jackson tx tonx 在实时处理需要解决贷款和延迟问题的应用程序时能达到很好的效果。适用于工程机器人、商用无人机和企业协作设备等项目。 模组支持与训练的 ai 模型。英伟达套工具包合 jackpacksdk 等开发资源, 支持深度学习、计算机视觉、 gpu 计算、多媒体处理、 codacudna 和 tens rt 等软件库,以及其他一系列流行的 ai 框架和算法, 比如 tenserflow、 pietart 咖啡咖啡二、 carris mx net 等,对于 ai 学习或者 ai 产品部署都是一个不错的选择。 开发套件搭载了 jasonlbsb 底板,底板左侧引出两路 csi 摄像头,可以接入 imx 二幺九和 imx 四七七等高清摄像头。 供电采用的是五点五乘以二点五的 dc 接口,支持九伏到二十一伏范围的电源设备。套件中配送了十九 口服桌面式电源,方便用户直接上电使用。正面还引出了 dp 接口和 hdmi 高清接口,方便用户接入屏幕做显示版。在的四路 usb 三点零高速接口,可以接入键盘、鼠标或者 usb 固态硬盘等 usb 设备, 正面右侧是 is 四五标准的签照以太网口,搞定用户网络通信的需求。 microusb 接口可作为系统烧录接口使用。 右侧四十 pin 眼角采用彩色标记,颜色区分功能一目了然。底板的背面引出了 m 点二 t e 接口和 m 点二 t m 接口,支持 m 点二无线网卡和 n v m e 太硬盘等设备。套件赠送了支持双模 wifi 和蓝牙五点零通信的无线网卡,赠送一百二十八 gbmvmv 固态硬盘,满足存储扩展需求,让用户不再限于版。在 emmc 不足的烦恼中,套件同时配套了高颜值散热器,内嵌的散热风扇转速可达五千五百转,为套件提供强力散热。 jackson tx two nx 套件配套完整,宫殿街口、存储散热都为你准备好了,就等你来开始一趟 jackson 系列 ai 之旅。
37微雪电子






猜你喜欢
- 1.4万牛夫人🐮