施耐德plc上的sl sd表示什么

粉丝444获赞868
相关视频
 06:35查看AI文稿AI文稿
06:35查看AI文稿AI文稿下面给大家讲解一下机器专家微一点二软件的使用方法。 第二章硬件介绍第一节莫迪康 m 二四幺硬件介绍 现在大家看到的这款 prc 型号是 tm 二四幺 cec 二十四 t, 它拥有双核处理器,内存有六十四 mb, 闪存可以达到一百二十八 mb。 它上面的 tm 二十一 c 是代表它属于 tm 二十一系列。 后面的 e 代表它集成了一个以太网的端口, e 后面的 c 代表 prc, 还集成了一个看 open 的总线段子。二十四代表 prc 的输入输出通道总数为二十四。最后面的 t 代表 prc 为晶体管圆形输出。 在 prc 的左侧是一个 tm 四的总线连接器,它可以扩展三个通讯模块,就是这个 被绿色包围着的是 prc 集成的以太网端口, 我们可以用它上下载程序获得通讯。 中间这个位置有一个可以扩展的 扩展板卡,二十四点输入输出的 prc, 它只有一块可以扩展。四十点输入输出的 prc 可以有两块扩展板卡, 在 prc 的右边,他还有上下两块护盖。打开上户盖,我们可以看到上面有个拨码开关,是用来控制 prc 运行和停止的,我们也可以在软件上设置。 下面这个位置是一个三伏电池舱,旁边是一个 sd 卡的卡槽, 可以使用 sd 卡上下载程序、固件更新和数据存储。 打开下壶盖, 它是一个 usb 迷你杠 b 的接线端口,我们可以在不方便给 prc 通电的情况下,通过它进行程序的下载调试。 最右侧是一个 tm 三和 tm 二的总线连接器, 他可以增加扩展模块,最多的时候可以增加到十四个扩展模块。 打开上盖板,这是一个阿基四五的串形通讯口,他下面 是串型通讯口二,上面是串型通讯口。一。 prc 支持两路串型通讯, 右边是十四路嵌入式输入,包括八路快速输入和六路常规输入,还可以支持十六路的单向高速脉冲输入或者四路的双向输入。 打开下盖板,下边左侧是看 open 的接线端子,可以连接六十四个重站,并且集成有终端电阻。 旁边是一个看 open 的线路开关。右边是实路嵌入式输出,他 可以支持四路的 pto 高速脉冲输出。 看欧盆后面是 prc 的二十四伏电源接入点, 在 prc 的后面有两个锁钩,是用来固定 prc 的,在 prc 的左上角和右下角还可以支持螺丝固定。 我们看一下 prc 前面的 led 指示灯,第一个 pwr 是显示 prc 电源是否有电。 第二个阿优 n 是显示 prc 的当前运行状态。第三个一啊啊起到 prc 的报 作用。第四个 io 指示灯如果亮起的话,他代表了分布式 io 串型线路。 sd 卡扩展板, tm 四种线, tm 三种线, 你太网端口或看 open 端口上存在错误。下面的 sd 如果亮了,表示 prc 正在访问 sd 卡。 bat 代表 prc 的三伏纽扣电池是否需要更换,或者电池电量已经很低了。 第七个和第八个 sl 一二指示灯代表了 prc 集成的串形通讯状态。 第八个 tm 四代表 tm 四串型总线是否出错。第九个一 th 代表集成的仪态网端口连接状态。第十个 can 杠二代表看 open 总线活动的状态。第十一个灯,也就是最后一个 can 杠一代表看 open 总线是否出现错误。 右边还有嵌入式输入输出端子状态的 led 指示灯,了解这些 led 指示灯的含义,可以帮助我们快速的锁定故障点,方便我们维护设备。 更多内容大家可以访问施莱德电器官方网站。
64来过一遍 05:51查看AI文稿AI文稿
05:51查看AI文稿AI文稿下面给大家讲解一下机器专家微一点二软件的使用方法。 第九张, sd 卡功能的使用第一节使用 sd 卡下载程序, 下面给大家介绍一下使用 sd 卡给 prc 下载程序。我们以 m 二四一 prc 为例, 这是一张 m 二四一的十六 g sd 卡, 这是一个空的 m 二四一 prc 里面没有任何程序。 我们首先将 m 二四一的这张 sd 卡 将 sd 卡插入电脑, 右击,选择格式化文件,系统里格式化的文件类型,选择 f a t 三十二 格式化完成以后,我们在机器专家为一点二中编写一个小的程序,使用 fd 卡下载到 prc 当中, 添加 m 二四一 plc, 添加程序组织单元, 编写一个简单程序。 当 prc 开始运行以后, qb 零的八个位同时为一,将 pu 拖动到任务中, 点击工程,选择大容量存储。 这里可以使用红命令下载程序或者上传程序。下载或者是上传原程序以及其他功能。上传,这里是上传他的日志 文件,他还可以通过这里添加单个命令,选择上传或者下载控制器的其他文件, 设置控制器的节点名称, 删除或者重启。 如果选择这里的其他命令,在目标这里要选择相应的功能。 我们使用红命令演示,选择下载程序, 点击生成,选择 sb 卡,确定完成以后最小化。机器专家软件 弹出 fd 卡, 将 sd 卡插入到 m 二四一 prc 之前,首先要将 m 二四一 prc 断电,当 prc 断电以后,我们将 sd 卡插入到卡槽中, 在这里的 sd 指示灯常亮, er 灯闪烁时,就说明程序已经下载成功,断电,拔出 fd 卡 通电, 通电以后看到运行指示灯开始闪烁,说明控制器里已经有程序存在,将开关打到运行状态, 运行指示灯常亮, qb 零到八个位的指示灯常亮。 这里的 qb 零的八个指示灯为一,说明我们在控制器中下载的程序已经正常运行。 更多内容大家可以反问施耐德电器官方网站。
73来过一遍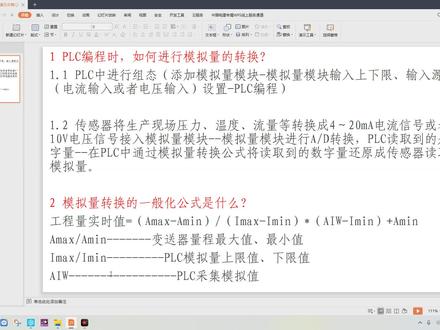 10:21查看AI文稿AI文稿
10:21查看AI文稿AI文稿大家好,我是李老师讲电器,今天这一节呢跟大家分享的是就是我们在 ps 编程的时候是如何来进行这个模拟量的一个转换与这个运算。首先呢我们要知道这个, 嗯,像现场的传感器采集的是一个四到二十毫安或者是零到十伏的一个电压电流信号, 这个信号呢是一个模拟量,我们知道这个 prc 啊,他只认这个数字量,零幺零幺的数字量, 那这个进行一个是怎样转换的呢?我们来今天这一集就来学习一下,就说 ps 编程时如何进行模拟量的转换。 首先我们在 prc 进行主态的时候添加模拟量的模块,然后设置模拟量模块输入的上下线, 然后输入原形式是电流输入还是电压输入,电流输入是零到二十号弯或者是四到二十号弯,电压输入是零到十伏,零到五伏。 然后传感器将现场压力、温度、流量等模拟量转化成四到二十毫安电流信号或者是零到十伏的电压信号, 接入这个模拟量转换模块进行这个 ad 转换,这个 a 就代表这个是 模拟量, d 就代表数字量。进行 ad 转换后, psa 读取到的是数字量, 然后我们在 prc 中通过模拟量转换公式将读取到的数字量在还原层传感器读到的这个模拟量,这个呢就是我们一个一整个的一个过程, 但是有的 prc 它是提供了相关的这个模拟量转换的指令或者是功能快, 在这个 m 三四零 qc 中啊,他没有提供这样的模拟量转换的这个指令或者是功能快, 那我们怎么来做呢?我们就要用到这个模拟量转换的一般化的公式,这个工程量实时指就等于这个 变送器良辰最大值减去最小值,然后除以这个模拟量的上限值,减去模拟量下限值,乘以这个 psc 采集到的这个值减去这个模拟量的下限,然后再加上良辰下限 这个公式,就是这个进行模拟量转换的一般化公式,不管是什么 prc 都可以使用这个公式来进行 模拟量的一个转化。首先下面我们就来看一下这个在这个 psa 边产是如何进行的。 首先我们在主态的时候啊,在这个硬件主态的时候,我们添加了一个这个 ami 零四幺零的模拟量输入模块,然后我们对这个通道零进行主态的时候,我们选择的是这个 四到二十毫安,四到二十毫安输入,然后这个比例这个地方 百分之零对应的是零,百分之百对应的是一万,这个就是相当于把四到二十毫安在转换的时候转换成零到一万这个区间, 这个也可以选上,也可以不选这个,这个是一个相当于判断,可以判断传感器是否溢出的一个条件。 然后我们在这个,嗯,数据编辑器里面这个 dfb 建立了一个模拟量类型,是 dfp 功能快。 然后我们看一下这个输入输出有哪些输入输出和这个公共, 然后我们输入输入,在这里面有模拟量输入值,就是这个 prc 读取到的这个 嗯,将四到二十毫安转换成这个零到一万的值读取的,这是模拟量的上限,模拟量下限就是这个我们刚刚设置的零到一万,这个是传感器 良辰上线,良辰下限这个是一个 real 数据的,其他的这几个是一个暂行数据硬的数据类型。 然后我们在这个输出输入输出里面建了一个实时值,也是一个瑞尔,然后我们在这个公共变量里面建了三个也是瑞尔变量。 然后我们就看一下这个程序是怎么写的。 首先我们需要把这个模拟量输入纸使用这个 inter two real 转换成 嗯,浮点数放在这个看一里面把这个模拟量上限还有模拟量下限都使用这个整形转浮点数转换之后放在这个临时变量中,然后我们调用了一条这个操作快, 我们使用操作快来进行一个公式的计算,这个公式,这个公式就是我刚刚在这里讲到的这个公式,把它写一遍就行了,这个很简单, 然后我们编好了这个功能快之后呢,我们在这个主程序来进行一个吊用,吊用之后呢他就成了这样,就说有很多银角 模拟量输入值,这个就写我们这个 prc 的模拟那个传感器地址,传感器输入的这个一个地址 上限以外,下限零,然后传感器良辰就根据我们实际的来写,是压力的零点零到一点六,造化的就写零到一点六, 然后这个实时值,我们在这个数据编辑器里面这个边量里面建了一个压力实时压力 数据类型要前前后对应是一个 rao 数据, 然后这样的话这个主态就已经完了。然后我们可以来仿真运行一下点连接, 然后我们再点将项目传输到 prc, 然后我们点击运行 现在这个模拟量数字,它是一个零,然后这个对应的这个实时值班就是零,我们把这 这个改一下,我们把这个纸修改一下,把它修改一下, 我们把这个纸修改成一万,一万的时候我们再来试一下,在 重新传输一下一万的时候,他就对应的是一点六 啊,这就是一点六,我们也可以改成这个五千,五千的话我们可以猜一下这个是对应多少,是零点八兆塔五千, 这样的话就是零点八这个模拟量输入值,他可以是零到一万之间 任意的一个整数。这里我们为了就是只是为了观看方便,设了几个特定的满良辰, 然后零点还有这个中间值,让大家观看的更加就说明显。好了今天的分享就到这里,谢谢大家。
214李老师讲水电站 01:31查看AI文稿AI文稿
01:31查看AI文稿AI文稿现在这款 cpu 呢就是刚刚从 plc 控制柜上拆下来的这个 cpu, 我们先看右下角的网口,这个网口呢主要作用是两个 cpu 之间的同步, 然后呢这我们把霸王口给拔下来,拔下来之后呢我们可以看到他是一个光口转电口的一个配件,我们现在插上。 然后呢这个网口呢主要做同步,然后上面这两个网口呢是连接施耐德的设备,就是 cia, 所谓的 cia 呢就是一个远程重站, 中间这些白框框在一起的,说明他们是用了同一个 ip, 你可以理解为他是一个小型的一个交换机,但是交换机有 ip, 这就是这两个网口的作用,主要用于主环网上面 这个口呢是服务口,一般呢我们可以下载程序啊,然后上面的指示灯呢是我们可以监测 cpu 的运行状态,比如说运行啊,错误啊,都可以通过灯的闪烁颜色或者说亮的不同的颜色来进行一个区分。 然后最左边呢这个绿色呢是我们的一个 s d 卡的一个插槽,我们 s d 卡就插在这里。然后呢这整体呢就是一个 嗯 c 意念的一个介绍。然后呢我们现在拿起 c p u 打开,我们可以看到这个 c p u 后面有两个旋转的一个指针,这个呢下期我们来讲。
63自控项目室 03:25查看AI文稿AI文稿
03:25查看AI文稿AI文稿和大家分享一款思奈的变频器的通信,英文用以 s 七新分子 s 七杠幺二零零 plc 这思奈的变频器 app, 幺二五六八是 rtu 通信应用,和大家分享。第一个是应线接线, 这个图呢是斯乃德变频器阿杰四五接口,一个网线接口,用到了四号角跟五号角 跟四号角跟五号角,这个模块呢是 s 七杠幺二零零通信的通信卡 c b 杠幺二四幺, 下面是极限段子,到这里四号角呢 接到 t 高 r b 这两个 t b 给他短接,五号角接到提高 r a 这两个短接线是比较简单的。 第二个 atv 幺二的参数设置, 这是 itv 幺二的一个变形器的说明书。第一个就是 五六八是地址设置,这是波特利的设计。第三个是五六八的格式通信格式, 我把超时这四个长头设定好之后, 他要设置一个命令通道和给定通道。 六十二给定通道就是设定那个变频器的频率, 通过摩托把子来设定命令通道,控制变频器的起停也要通过摩托把子进行来控制。 我们用变频器的通信软件调试软件,不是通信调试软件 so move 来进行设备, 这个通信设置沃尔巴斯的地址,我们设置二,通信比特率,博特率九点六格式八按一超时一秒, 这是通信格式。第二个是这个命令通道,这个给定通道 输入变频器的频率,通过摩洛巴斯命令通道控制变频器的启停,通过摩洛巴斯在这个搜过之后,然后写进去就好了。 到此呢,我们这个一二两个就讲完了。
164許工日記 09:16查看AI文稿AI文稿
09:16查看AI文稿AI文稿下面给大家讲解一下机器专家微一点二软件的使用方法。 第八章看欧盘通讯 第二节 can open 与私服控制介绍下面给大家介绍一下 can open 与私服控制之间的通讯。首先打开机器专家微一点二软件 新建项目, 添加 m 二四一 prc, 配置一下 prc 的 ip 地址, 点击开 open bus 后面的加号, 先插主线,找到开 open 管理器, 点击看我本管理器后面的加号。添加私服驱动器的型号, 这里我们选择这个四伏驱动器给大家演示。 双击看欧喷 bus 设置波特率,这里波特率我们保持默认。 双击看 o pen bus 管理器, 这里可以看到控制器的节点 id 为一百二十七。双击私服驱动器, 可以看到私服驱动器的节点 id 为一,所以私服驱动器硬件上的参数设置中看 openbus 通讯 id 参数也要设置为一。 看 openbus 通讯数据的方式有两种,一种是 pdo, 一种是 sdo, 我们这里选择 sdo, sdo, 这里可以选择添加 sdo, 可以选择我们需要添加的通讯数据。 前面这里是一个十六位的,所以后面这个是一个八位的子,所以这个参数是私服驱动器旋转一圈的脉冲数, 这里是十六进制的幺三八八零零,代表十进制的一百二十八万,这里更改为十六进制的 二七幺零,是实际制的一万,也就是说我们给他一万个脉冲,他旋转一圈。 点击上册这里的开 open io 映射,这里所显示的参数是私服驱动器的参数,在控制器当中的 io 映射区配置完参数以后,添加程序组织单元, 添加一个功能块, 点击这里白色的框,打开输入助手,选择驱动器运动控制的库, 这里是湿服驱动器运动控制的各个功能。首先添加使能的功能块, 第一个银角是选择轴的名称,我们使用输入助手选择轴的名称。 第二个音讲是智能信号 状态输出,错误输出。再添加一个功能块, 打开输入助手, 选择速度控制功能框 周名称 省能点上升沿出发。 第三个银角是电机的速度,这里我们不直接填写。删除问号,删除功能块后面的问号。 再添加一个功能款, 打开输入助手,选择停止轴的功能块 周名称 十,能点上升烟,出发, 删除功能块后面的问号。 再添加一个功能块, 打开输入助手, 选择复位轴的功能块 周名称, 使能点上升烟,出发, 删除公众号后面的问号。 功能块填写完成以后,将 pou 拖动到任务配置中,将程序下载到 prc 中。 将程序下载到 psa 中以后,首先接通一下电量 a 杠三,启动复位轴功能, 下面接通变量 a 杠零,启用轴,使能功能变量 a 杠零要保持为一。在速度功能块设置一下速度, 这里我们设置为一万, 接通一下电量 a 杠一, 可以看到四伏电机开始旋转, 如果我们想让轴向相反的方向运行,这里的速度只给他一个负数。 再接通一下电量 a 杠一, 四伏电机开始反转, 使用停止轴功能块,停止轴, 接通一下变量 a 杠二, 四伏电机停止。 更多内容大家可以访问施莱德电器官方网站。
79来过一遍 00:16查看AI文稿AI文稿
00:16查看AI文稿AI文稿在线仿真功能呢?他的好处就是说你可以把电脑和 psc 连起来,然后电脑就能够看到 psc 里面所有的逻辑关系,这个时候你可以改变其中任何一个计算器的值或者状态,进行一个调试,看后面有什么反应。
171三盛机电电气自动化









猜你喜欢
- 1346鹏哥说电路