三菱指令怎么同时使用多个输出
我们接着了解三菱 p a c 的编程指令 c n p 语调指令, 它比较的是两个值, s 一和 s 二比较,将其结果输出到胃炎键 d, 这里就是胃炎键,输出到 d 胃炎键里。 大于就是 s 一,大于 s 二已至就是等于 s 一,等于 s 二,小于就是 s 一,小于 s 二。 输出结果 d, 它可以是 y, 输出端口可以是 m 辅助继电器、状态继电器 s 一 s 二,它可以是低存储器、计数器、定时器、 实数。我们看手册上面的一个实际的例子, c m p 指令 s 一指定的是一个实践质数,一百 s 二指定的是计数器 c 二十 输出元件, d 指定的是 m 零辅助继电器输出元件 d, 它指定的软元件会占用连续的三点, 从 m 零开始,连续的三点就是 m 零。 m 一 m 二 一个比较指令,它会有三个连续的输出结果,当 s 一大于 s 二的时候, m 零会接通。 s 一等于 s 二, m 一会接通, s 一小于 s 二, m 二会接通。不同的比较结果,不同的原件接通。我们看程序 c m p k 五, c 二十, k 五是 s 一, c 二十是 s 二, k 五和 c 二十里面的数值进行比较,结果输出到 m 零, 我们先把 x e 接通。我们这里启用的是模拟模式, 现在模拟模式已经运行,我们先把 x 零接通, 接通 x 零之后, m 零它马上接通。第一个比较条件, s 一大于 s 二的时候, m 零会接通。我们看这里, s 一大于 s 二, m 零接通。 所以 x 零一接通的时候, k 五它是大于 c 二十, c 二十的直线呢,是零,所以第一个条件大于成立,所以 m 零它是接通,然后我们去接通 x 一、 x 一,每接通依次西林计数器里面的数值会加一 再接通,现在是二,再接通,是三,再接通,四再接通。一次, s 一就会等于 s 二就是 k 五等于 c 二十,第二个条件它就会成立, m 一就会接通。我们注意看 第二个条件乘以 s 一等于 s 二, m 一接通,这个时候 m 零是因为 k 五的值它并不 大于七二十,现在他们的值是相等,所以 m 零的条件不成立,所以 m 零断开,这个时候 m e 是接通的状态,我们接着接通 x e, 现在 k 五小于 c 二十里面的值六,就是 s 一小于 s 二,那么第三个条件就会成立,所以 m 二它就会接通。 我们看这里 s 一小于 s 二, m 二接通,上面的两个触点要断开, 这个时候的 s 一就是 k 五小于 s 二是六,所以下面的 m 二长开触点就会接通,我们继续接通 x 一, c 二十里面的数值继续增加。由于 s 一继续小于 s 二,第三个条件继续成立,所以下面的 m 二它会一直接通。 那么等到 c 二十里面的数值等于十五的时候, c 二十计数器对应的常开触点接通 g r s t 期间指令就会把 m 零、 m 一、 m 二连续的三个辅助继电器全部复位,同时把 c 二十里面的数值清零, 我们继续接通 x 一, c 二十等于十五的时候,下 上面的触点就会接通。刚才的 c 二十他已经接通了一次, 把 m 零到 m 二全部复位,同时把 c 零的数值清零。 因为 c 二十里面的值现在等于零,所以 s 一他又大于 s 二,所以下面的 m 零他马上就会接通。我们再回去手册看一下 复位的情况。 c n p 指令,他同时使用了三个软件键, m 一, m 一 m 二, 那么你要把他们复位,再使用三个复位指令,把 m 零 m 一 m 二同时复位。或者你使用下面的 z i m 期间 指令,把 m 到 m 二的三个存储器同时部位 c m p 指令, 它同时可以控制三个输出元件。当我们希望两个数值进行比较,可以有多个输出结果的时候,去使用 c n p 指令。

粉丝7.2万获赞18.5万
相关视频
 05:28查看AI文稿AI文稿
05:28查看AI文稿AI文稿我们接着往下看,现在需要一次性将歪零、歪二、歪五、歪七这四个输出端口一次性把它接通, 那么我们可以用这个传送指令把这个 k 幺六五这个数传送到 k 二 y 零,那么接通的就会是 y 零、 y 二、 y 五、 y 一七这四个输出端口,那么这个 k 幺六五是怎么算出来呢? 这里需要的是从歪零到歪七有八个输出端口,那么我们把歪零到歪七这八个输出端口从低位往高位排,歪零要接通,他就是 等于一,歪一不接通等于零,歪二接通等于一,歪三、歪四都不接通等于零,那么歪五要接通等于一,歪六等于零,歪七等于一,那么这里就出了一组二进自数, 我们把这一组二进字数转换成十进字数,选择一个二进字转换成十进字,把二进字数从高位往低位输入 幺零幺零零幺零幺,那么点一下这个转换,那么这里的实际字数就是幺六五,那么 我们把 k 幺六五传送到 k 二 y 零这个存储信里, 那么歪零、歪二、歪五、歪七至四个输出端口,他就会一次性被点亮。 我们来看这一个程序,当 x 二接通的时候,传送指令就会将幺六五传送到 k 二 y 零,我们验证一下是不是 y 零、 y 二、 y 五、 y 七接通。 我们现在又启用模拟模式,这几个视频我们都用到这个模拟模式,大家在家里呢就可以用这个编程软件去用这个模拟模式来自己练习一下写程序。 那么我们现在把这个 x 零二调试当前指更改,把它接通, 接通了之后, y 零、 y 二、 y 五、 y 七四个线圈同时接通,那么在时务 pilace 上,他的 y 零、 y 二、 y 五、 y 七输出端口他就会被点亮,那么当我们断开这个 x 零二 这四个线圈,他还是在接通的状态,那么我们如何把它一次性又断开呢? 我们往下看,当 x 零三闭合的时候,把 k 零传送到 k 二 y 零 里面去,那么歪零到歪七这八个歪线圈他就会全部断开。我们现在把 x 三给接通, 我们这个时候可以看到这八个线圈全部断开,也就是已经复位。我们看一下这里,现在 k 二八零里面存出的数字是零, 那么就是指这里歪零到歪七,这里所有的二进字数都是零,那么歪零到歪七这八个输出端口 他就会断开,我们刚才的用的就是这条指令,那么你也可以用这个七间复位指令,把 y 零到 y 七之间的所有 y 输出端口一次性全部复位,也是同一个效果。 那么我们再往下看点这条传送指令,把 k 十传送到 k 二 x 零,这条指令有没有问题呢?我们在编程软件里试一下, 我们切换到写入模式, 按一下 x 四的时候,那么就把 把这个 k 十传送到 k 二 x 零,我们点一下,确定 点下去之后,他就会告诉你这个指令是不存在。 那么为什么 k 十不能传送到 k 二 x 零呢?
553知多工工控知识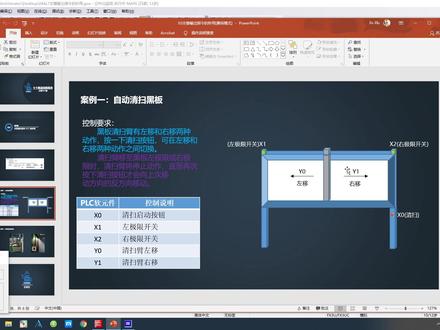 10:00查看AI文稿AI文稿
10:00查看AI文稿AI文稿大家好,这里是公控老友记,相识是老友,一起学习,一起共勉。我是零公,今天我们继续我们的十个典型控制程序三零 poc 篇的案例讲解。 这一期我们的第四期啊,是讲解交替输出指令 alt 的妙用。我们先看看 fx 三由编程指令上,嗯,指令手册上对 alt 指令是怎么介绍的, 这里呢分了两种类型的指令,一个是持续输出型,一个是脉冲输出型啊,持续输出型,也就说我们如果是这边有输入按住,那他这边指令会输出,这里呢他是一个脉冲型的,也就是说我们这边 按住之后只是上升严处发达。当然我们这里用到的是 alt 指令,就我们编程的时候,到时候用到这个指令,那这个指令的话,我们怎么样做到跟他有脉冲输出形式一样的功能呢?就是我们到时候是把这个指令用用上升严, 就是输输入触发的指令,我们用的是上升音,这样子的话,到时候他的嗯持续图呢,就跟这个指令是一样的。 嗯,这里呢我们看一下输入信号上升严处发之后,那这边同时他的输出位啊, 同时也有输出,有输出之后呢,他是一直输出,等我们这边把输入信号撤掉呢,他还是有输出的,然后等到下一个出发再 再按下去的时候,他的上升盐一倒好了,这样子他又下,他的输出呢就断开了, 然后再再持续到下一个上升严,他又触发他上升,也就说相当于是把这个位取反了,你按一下他是高电瓶,再按一下他是低电瓶,这个这个用反呢,到时候我们就有很多地方有 他的很好的应用,我们先来看一下我们的案例吧。好,这是一个自动清扫黑板的一个这么一个装置啊,我们看一下他这边的控制要求, 就是说黑板轻扫臂是这个东西左移和右移两种动作,就是说这个轻扫臂啊,有 左移、左边移动,右边移动这两种动作,然后按一下我们这个清扫按钮的时候呢,他可以往左边清扫,也可以往右边清扫,然后清扫 b 移到黑板的左极线啊, 这个是左极限,然后这个是右极限,一到左极限或者右极限的时候,这个清扫币要停下来,但是呢我们再按一下清扫的时候呢,他要往反向运动, 就说比方说在这里我们按一下启动之后,他要往这边走,如果是在这里呢,我们按下启动,他要往这边走。 好,就是这么一个比较简单的功能,我们来看一下我们这边的案例程序是怎么实现这么个功能的,我们看一下 这个程序,这里呢我们看一下 x 零呢是轻扫启动按钮, x 一是左极限, x 二是右极限, y 零轻扫 b 往左啊, y 一是往右,我们直接在线模拟一下, 我们看到没有默认状态,他是 of 的, of 的时候呢,这边是清扫币是往右的,就说一启动瞬间,如果说我们这个清扫币在中间,他优先往右 往右呢?等到右极限的时候, x 二是不是要碰到的,对不对? 我们这个 x 二是要按的,我们调试先给他就是第一步动作, x 二先给他按,按掉之后呢,相当于说我们这个清扫币是停止在这个位置上的啊,停止在这个位置上,那我们接下来呢, 按一下清扫按钮,他是不是停止在这里之后,他要往这个方向移动?五二零要有输出,对吧?我们先按一下, 好,五二零有输出了,那同时我们把这个按了之后要给他复位掉,然后这个刚才也是蹦在这里啊,也要给他复位掉,要不然下一个逻辑会出错的。 那这样子的时候他是往左往左移,之后他的动作呢?下一步是碰到这个左极线, 我们把左极线给他弄掉。好,左极线用掉之后呢,他停在左边这个位置,然后再按一下清扫按钮,他又往右, 再按下轻松按钮,好往右我们再把它复位啊,你看一下这里,我们如果是上身颜色看不出他已经得电,实际上我们刚才给他按掉了 x 零,看一下这里能看得出来他是唯一的啊, 先给他复位掉,然后还有这个左极线也是唯一的,应该刚才只是点了一下,因为是嗯,跟实物这边拿软件来模拟的稍微有点差别的, 我们按了之后要记得帮他复位是一对吧?一好复位,这样子就复位到 磨人状态了,然后这边是往右往右动作,接下来往右呢,他又碰到这个后之后呢又停下来,这样子形成一个循环,就是反正只要是按过他之后, 这个东西就会动作,然后他什么时候停呢?肯定是要碰到左极限或者右极限,然后相当于说我按一下他往左边 到极限位停止,再按一下他又往右边到极限位停止,就是反复反复,左右左右。如果说不用这个指令,我们单单用一个按钮来实现的话,嗯,怎么说呢?他实现不了,就说你释放按钮之后,他 还能还能按照这个要求来动作,只能是相当于说如果是用一个按钮的话,他按 比方说是 of 状态,他是往一个方向动,然后按下去之后按一个状按的状态往另一个方向动。所以说我们现在 alt 指令啊,他起到的作用就是在这里,就我们按钮按下去之后可以释放掉,然后再按一次,他又有另外一个状态, 所以有些有些 poc 呢。嗯,仿三菱的一些 poc 啊,也有这个指令,像欧姆龙、西门子的好像没有 alt 这么个指令,当然他也可以实现这种交替输出的,只不过可能要编一段程序。然后三菱这种呢,有这个指令的话,我们就可以直接调用了。 好,这是一个案例,我们再看我们的另一个案例啊,另一个案例呢,是这边我自己做的一个项目上。 好,他怎么应用呢?就是相当于说我一个按钮实现,他的单按钮启停, 按下去他是往里进的,再按下去往外出。那我们这这两个托盘呢,是通过步进来控制的,相当于说我左边一个按钮控制这个托盘,右边一个按钮控制这个托盘,然后把弓箭送进去,送到机器,机器人取货的位置啊, 然后这这底下加油检测的。嗯,我按你按一下,然后步进,比方说是正转往里看一下, 正转往里按下去,正转往里,然后到里面检测到了之后停下,停下,我再按一下,然后他又反转往外, 就实现这么个简单的功能,当然我们如果用两个按钮呢,也能实现啊, 但是在这种场合的话,因为我按钮增多啊,机械相应就增多了,然后我布的这个管子就会变粗,然后这里考虑到美观这些东西,然后在一个边上太多按钮了, 操作起来也麻烦,所以就做了一个单按钮启停,在这个时候这个 alt 指令呢,就很好的起到这个作用。我们可以看一下刚才那个程序, 就是我们这里啊,其实只要用到这个 m 零就可以了,下面这一部分就用不着了, m 零,然后但是呢我们肯定有一部分程序去组合起来去控制那个步进的, 我们这里只用到这个 m 零的话,就这么个讲解一下,就是我按一下 m 零是 on, 按一下它又 off, 那我们看一下按一下呐, on, 按一下 off。 好,刚才是因为按了之后我们要给他复位掉,比方现在也要复位掉,这这样子的话才是完整的模拟一个点动按钮。 好,我们两个案例差不多就这么个意思,讲解完了我们这一期就到这里,我们下期再见。如果觉得对你有帮助,欢迎收藏、转发并关注我们,谢谢大家!
187工控老友记 08:46查看AI文稿AI文稿
08:46查看AI文稿AI文稿大家好,我是曹公。这个视频呢,我们来讲三个很重要的输出指令,分别是 outset 和 reset。 首先我们说一下,在我们二十九个基本指令里面,只有五个是输出指令,分别是这三个啊,再加上另外两个 p l s 和 p l f。 这两个指令呢,用的比较少啊,很少用一个呢,是他理解起来稍微啊麻烦一点,稍微不注意呢,可能就会错啊,所以说呢,大家都不怎么用这两个,我们常用的输出指令就是这三个。什么 叫输出指令的?输出指令的意思是啊,他会改变咱们软元件的值啊,你比如说你 out 一个软元件啊,他这里会改变软元件的值, 如果你 set 一个软元件啊,也会改变对应的软元件的值 啊,这个改变倒不一定改变啊,因为他可能之前就是一啊,你把它 set, 他可能还是一啊,改变倒不一定改变,但是问题是啊,他是他可以改变啊,他可以改变。 像其他的二十四个基本指令啊,他都没办法改变软元 键的值,它只是一些触点指令,包括一些结合指令啊,还有一些空指令啊等等,他那些都不会对软元件的值产生任何影响。 好,我们一个一个说这三个指令, alt 指令呢,它在 t 型图里边是这个样子的啊,比如说这个是左母线啊,我们下个视频呢,会讲这个 t 型图,它的一个啊,原理和执行方法 啊,我们这一讲呢啊,先稍微的用一下,比如说啊,前边有各种触点指令, 然后最后呢 alt 指令呢,在 tnt 里边对应的是一个括号啊,你是外零 或者是 y e 或者是 m e 啊,都可以选择一个啊,它的外观就是一个括号,这个就是对应的 alt 指令, 这个 alt 指令它是怎么执行的呢?它是这样子的,比如说啊,咱们把这个 y 一去掉它,把这个 m 一去掉,它,我们这里呢,我们这里把它确定一下,就是输出外铃。 然后呢,这个指令它是怎么执行的?它的执行逻辑是什么呢?比如说啊,前面这些条件都是满足的,都是通的,都是通的。然后呢,执行到这个 alt y 零的时候呢, y 零的值就会变成一。别管 之前外零是零还是一啊,只要执行这个的时候,他前边是通的,或者他的驱动条件是一,那么呢, y 零它的值啊,就会变成一。如果前边的区分条件不满足啊,比如说这个是断的,或者这个是断的,对吧?它前面条件不满足, y 零的值就会变成零 啊,他就是根据前边的条件是否满足来啊,给他负不一样的值。 满足啊,就是一不满足就是零啊,就相当于是满足了啊,这里的能流啊,流过来了,他的线圈 就通电了,就得电了啊,可以那么理解啊,逻辑就是这样子 啊,这一个呢,就是 alt, 其实 alt 一个未软元件还是很简单很单纯,很好理解的。 out 呢,他不止可以 out 咱们的普通的微软元件,他还可以 out 一些技术器、定时器啊,那个时候呢,稍微复杂一点啊,但是我们现在先不设计啊,我们现在只设计这个啊, out y m 啊,这样的微软元件, 当它使用 we 软元件的时候呢,这个 alt 指令非常好理解,对吧?就根据前面的条件变成一,或者变成零。好,我们接着说下一个 set, set 呢,其实 也是啊,前边有一些啊,触点指令,是吧?然后呢最后有一个 set, 比如说这里 set m 零啊,比如说 set m 零,最后是一个 set m 零输出之类,然后呢,如果说前边条件满足, 这个 m 零就会变成一,别管 m 零之前是什么值,只要前进满足了,他就执行赛特 m 零, m 零就变成了一, 如果说前边不满足啊,前边有不满足的条件,然后呢,整个条件是不满足的,那么的话呢, m 零 他保持之前的值啊,就是说执行这一句之前 m 零是什么,他还是保持之前的值,就是说什么呢?他跟 out 的区别是什么呢? out 呢,是一定会根据前边的这个条件来改变他的值的,但是这个 set 的 含义是什么呢?如果前面驱动条件满足,那么就执行 m 零,给他 set 为一,对吧, set 的意思呢?就是 啊,在英文里边, set 的意思就是置位的意思,置位呢,就是把它变成一变成真,对吧?就相当于是前面如果满足,我就给他置位, 前面不满足的,我就不治胃嘛,我就不管嘛,我就不执行这一句嘛,不给他治胃嘛,对不对?所以说 m 零 就保持之前的值啊,其实这个理解起来也很直观的,也很直观,满足就值位,不满足啊,就保持原来的值啊,就相当于这一句没有执行一样啊。这个呢,就是 set, 这个 reset 呢? r s t 呢?其实它跟这个 set 哈,它跟这个 set 呢,很接近,只不过呢, 它是复位指令,比如说这里也是 reset。 m 零也好啊,前面条件驱动条件满足,那么呢, m 零就会变成零,如果前面条件不满足,这个 m 零保持之前的值 啊,就相当于什么呢?相当于前面条件满足了,我就给他复位,复位的意思就是让他变成零嘛, 对不对?前面条件满足就把它复位,前面条件不满足啊,就不复位,这句话就相当于不执行啊,他还是保持之前的执。 现在大家能不能理解这个 aut reset, asset 和 reset 的一个逻辑了, 对吧?这个逻辑呢,其实很直观啊,大家一定要牢记。这个 alt 指令呢, 是无论前边条件是满足不满足或者叫真假啊,他一定会对应的改变他的值。 但是这个 set 呢,只是在前面条件满足的情况下,驱动条件满足的情况下给他制衣,不满足的话就不执行这个 reset 呢,他的逻辑也是这样子的啊,前面驱动条件满足,我就给他复位为零,如果条件前面条件不满足啊,我就不执行,他还是保持之前的执啊,对应的微软元件, 大家一定要深刻的理解这三个指令的逻辑关系好这个视频呢,就到这里。
650曹班长搞自动化 05:32查看AI文稿AI文稿
05:32查看AI文稿AI文稿这里的五条程序是四 a、 d 模拟量模块的控制程序。 第一条程序是设置四个通道为电压输出,凸是写入的指令项,模拟量模块写入数据 k 一是模块一,为什么是 da 模拟量模块是 模块仪的编号,在前面的视频有讲解, k 零四 b f、 m 零号存储器 h 零,它是十六进字数 h 零零零零 四个零。 k 一是代表写入一个数据, 那么这条指令写入四 dm 能量模块,它就是设置 四个通道,全部为电压输出。我们看一下四 d、 a 模拟量模块的手册。首先我们找到 b f、 n 存储器的说明,这里就是缓冲存储器 b f m 零号。 b f m 存储器,它是设置四个通道的输出模式,默认值是 h, 四个零就是我们程 器上的 h 零,它是十六进制。 b f m 零号存储器的详细说明。 b f m 零号存储器是设置输出模式。 十六进字数 h, 它后面会有四个数,那么第一个位数代表的是通道一。 每个通道它可以设置三种模式,一、二、三三种模式。 如果你设置成零,那么他就是电压输出模式,负十伏到十伏,我们看这边第一个微 数,他对应的是同道一,第二个位数对应的是同道二,第三个位数对应的是同道三,第四个位数对应的是同道四。 那么 h 四个零就是代表四个通道,它都是设置成电压输出。我们举个例子,比如你这里的数是 h 零零零幺,第一个一 代表的就是通道一,他现在的是电流输出模式,四毫安到二十毫安,通道一就设置成了电流输出, 然后通道二他的值是零,那么还是电压输出模式,通道三也是电压输出模式,通道四也是电压输出模式。再举一个例子,现在是 h 二幺零零, 那么通道一是电压输出模式,通道二也是电压输出模式,通道三呢, 它的值是一,那么它就是电流输出模式四到二十毫安,那么通道四它的值是 二,它的是电流输出模式零到二十毫安。所以我们程序上面的 h 零就是 h 零零零零, 通道一、通道二、通道三、通道四全部设置成为电压输出 负十到十伏,它输出的电压就设置成了负十到十伏。我们注意看一下 这里的说明,出厂默认值是 h 四个零,如果你新买到的四点 a 模拟量模块,它的默认值就是 h 四个零,那么它就是四个通道的是电压输出模式。 那么如果你拿到的是一块二手的是 dm 模拟量模块,那么你就要自己去 重新设置一下 bfm 零号存储器,把它的输出模式设置成你所需要的。
693知多工工控知识 11:48查看AI文稿AI文稿
11:48查看AI文稿AI文稿我们这个视频先来看这一个 plc 的实际小应用,当我把这个转换开关打开,那么 plc 上的十六个输出端口 他就会隔一个亮起,并且他会交替的不断闪烁,那么这里的指示灯就是表示下面的输出端口的接通情况,我们现在就把这个开关打开,这是一个转换开关, 我们看这里的指示灯就是隔一个亮起,然后不断的交替闪烁,只要这个开关一直接通,他就会不断的交替闪烁,那么这一个指示灯就是用来指示这里的接通情, 这一个指示灯接在的是其中的一个输出端口上,那么我们这个应用你用到的就是传送指令,那么当我们关掉这个开关,这里的指示灯就会全部灭掉。 好的,我们继续看一下程序是怎么编写的,我们一起来看。这个程序有两条传送指令, movcmlcma 是反转传送手册上的九点五反转传送, 那么他就是要把准备反转的数据每个位反转之后传送到这一个滴纯储养人间里面。 每个位都反转,就是指零转换成一,一转换成零,零是断开,断开反转就是接通,那么就是零转换成一,一转换成零。那么我们程序里面把 h 五五五传送到 k 四 y 零,那么亮起的指示灯会是哪些呢?就是哪些外输出端口会接通,如果我们在这一个外输出端口接上十六个指示灯,那么他就会隔开一个指示灯点亮。 我们看一下他的一个二进制转换, k 四 y 零,他有十六个未原件,从 y 零一直到 y 十七,那么把他们对应到 b 零到 一十五的十六个位,我们先把二进制数填进去, y 零要亮起,他就等于一, y 一不亮等于零, y 三要亮起等于一, 你要哪个输出端口点亮,那么他的值就是等于一,那么歪三不亮又是一歪,是要他亮,就填上一, 那么这里有十六个位,把它每四个位从 b 零到 b 三是四个位,他的二进字数是零一零一,把它转换成十六进字数就是五 h 五。 我们看这一个转换软件,二进制转十六进制数零一零一,他就是一个五, 其实是 h 五后面的四个位。 b 四到 b 七对应的是 y 四到 y 七,输出端口同样是零一零一,转换成十六进制数就是五。 b 八到 b 十一对应的是 y 十到 y 十三,转换成十六进字数也是五,后面的字四个位同样是五,那么总的合起来的十六进字数就是 h 五五五, 那么我们用传送指令把这个 h 五五五传送到 k 四 y 零, 那么就亮起的指示灯就会是歪零、歪二、歪四、歪六, 按这个表上的指示灯点亮,零的不点亮,那么我们实物上看到的就是 y 零点亮, y 二点亮, y 四点亮,这里的指示灯就会隔开一个点亮起来, 那么下一条就是 cml 反转传送,那么同样把这个 h 五五五传送到 k 四 y 零,那么他会把这一个数先反转,之后再传送过来。那么怎么反转呢? 这个二进字数是上面的这个,那么把它反转的结果就是,一就是等于零零就是 等你一,那么就是原来点亮的歪零,他现在就会灭掉,原来灭掉的歪一,他就现在点亮,那么正好跟刚才的点亮熄灭, 下面变成熄灭点亮,那么正好就是反过来点亮这排指示灯, 我们看一下这一个视频隔一个亮起,那么他的不断就是交替闪烁,只要这个开点亮,然后就反过来又隔开点亮交替闪烁。那么我们看一下这一个整个程序的运转过程。 x 三接通 t 零,定时器计时 t 零 k 三十,它的定时时间是三秒钟。 下面的这一个是比较指令,有三条比较指令,我们看这里是一个等你号,那么当踢零的值等于 k 十的时候,这个触点他会接通一个扫描周期。 那么第二个比较触点七零等于 k 二十,就是两秒钟的时候,这个触点会接通, 他接通的时间只有一个,扫描周期过了之后他就会断开。那么第三条比较触点他是七零等于 k 三十,就是第三秒钟的时候他接通, 那么这一个触点接通的时候 set m 零, m 零被滋味就是接通,那么这一条传送指令就会执行点亮 点亮 y 零, y 二、 y 四这些等于一的指示灯。 那么到了第二秒钟的时候,这条指令接通,他会把上面的 m 零给复位,因为前面的是用自卫接通的 m 零,我们下面要用复位 m 零把它给断开,把这条指令给切断, 那么从这个比较触点接过来的同时要自卫 m 一,把这一个 m 一给接通, 直行这条反转传送指令亮起之前没有亮起的指示灯, 那么等到 t 零等于第三秒钟的时候, rst 把这一个 m 一给 复位,那么就是把这个触点断开,这条传送指令切断,那么他紧接着的就是把这一个 m 十给接通,这是一个线圈,这个触点接通一个扫描周期,那么他也是接通一个扫描周期, 那么当他接通的时候,他对应的是上面的这一个长臂触点,这个长臂触点断开,那么后面的体灵定时器他的计时值就会复位,那么就会变成零。 那么由于这个 m 十线圈他接通了,值一个扫描周期,那么扫描周期结束的时候他就会 断开,他断开以后,上面的这一个触点他又会接通,他一接通踢灵这一个定时器,他又开始计时, 那么下面的程序他又不会执行,所以我们这里就是利用这一个 m 十线圈 去接通这一个长臂触点,或者断开它来让这一个踢灵定时器复位,然后重新计时,所以这里的程序就是在这个 m 十的通断去切换,他 不断的去重复。我现在把食物上的 x 零三给接通,我们看一下这个程序 接通了以后,这里就不断的记时间,这三个触点会轮流的接通, 那么这条传送指令直行,然后到下面这条传送指令直行,然后依靠这个 m 十去通断这一个触点,让这个替零定时器计时归零, 计时归零,那么他就是在这个程序的范围里不断的重复,所以我们 那么这个这里的指示灯他就不断的切换,切换切换那么就会呈现出一种交替闪烁的效果,如果要停止,他就把这一个开 关给关断。我们看一下面这个 x 零三跟上面的 x 零三是同一个触点,那么当他关闭的时候,这个触点就会断开,这里的程序不执行, 同时这个下降盐触点,他就会接通区间复位指令,就会把 m 零和 m 一给复位这两个切断, 然后再把十六进字数 h 零传送到 k 四 y 零去,那么就是把每一个 y 输出端口的数字 输入零给他,让每个输出端口给断开,我现在把 x 零三给关闭, 我们看到这一个触点接通了一个扫描周期,那么所以 m 零 m e 复位,它现在是断开,同时 k 四 y 零,它的值就等于零, 那么所有的外输出端口就会被关闭,那么我们这一个程序 里面就包含了一个定时器自卫指令,复位指令还有十六进制数,这个十六进制数和比较触点。我们前面的视频还没有讲解,那么后面的视频会讲解他 这里的定时器自卫复位指令,期间复位指令是我们前面的视频有讲解,那么这里就当做是他的一个复习应用,那么这一个视频就到这里结束,感谢你的观看。
434知多工工控知识 04:25查看AI文稿AI文稿
04:25查看AI文稿AI文稿朋友们大家好,今天我们继续来讲三菱 tlc 定位控制,今天我们来讲一下带加减速功能的脉冲输出指令, t l s r 指令,这条指令有十六位的指令,也有这个三十二位的指令,三十二位的指令呢?前面多了一个低字, 现在我们来讲一下这条指令的使用方法。首先第一步我们按下这个 h 零开关,自卫 m 零, m 零接通以后,我们就来执行这条指令,我们使用三十二位的指令 d p l h r。 那么我们来看一下第一个操作数,这个 k 一千代表的是频率, 也就是说这个是速度,这个 k 三千是他的脉冲速,然后这个 k 一百的话是加减速的时间,他的单位是毫秒,一百个毫秒, 这个 y 零是发脉冲的,这条指令我们只能用 y 零或者 y 一这两个 脉冲口,别的脉冲口是用不了的。然后往上面看,当我们发完三千个脉冲以后,这个 m 八零二九就接通,然后把这个 m 零给复位掉, 如果说我们需要反转的话,那么我们就按下这个 h 一接通这个方向的信号,那么他就会反转,这个就是这条脉冲阻令的使用方法, 这个就是这条,我们来看一下这个程序。首先第一个 m 八零零二, 这个是初始化的指令,我们使用了两条传送指令, 把这个 k 一千传送到 d 零里面,然后把这个 k 三千传送到 d 二里面,这个 d 零的话, 第一零是频率,第二的话是它的脉冲速,我们按下启动开关 h 零 啊,自卫 m 零,然后的话就执行这条指令 啊,当这个脉冲发完以后, m 八零二九就会接通,然后把这个 m 零复位, 如果需要反转的话,我们再按下这个 h e 接通这个 y 三,这个 y 三是一个方向的信号, 我们来按一下这个 h 零, 如果我们需要反转的话,我们这两个开关同时按下, 现在步进电机往负方向走,我们同时按上, 当我们需要步进电机往正方向走的时候, 我们就按下 h 零就可以了,这个就是 d p l h r 指令的使用方法。今天的视频就讲到这里,感谢你的收看。
173广州PLC编程龙哥 05:54查看AI文稿AI文稿
05:54查看AI文稿AI文稿按下这个启动开关, s 零, 他从这个地方发脉冲,发六千个脉冲,到这个地方发完脉冲以后,他就会停止下来。 大家好,今天给大家分享一条脉冲指令,我们先来看一下这个说明书,这条 p l h y 指令 它有十六位的,也有三十二位的,三十二位的话,这个前面加一个 d d p l h y, 那么我们来看一下第一个操作数,第一个操作数 h e 是指频率,也就是说速度,第二个操作数指的是发出的脉冲量。 第三个操作术是指发脉冲的 y 编号 p l s y 指令只能使用 y 零和 y 一这两个蹲口, 其他的蹲口用不了,所以说这条指令用的比较少。我们再往下看一看这说明书,这个是三十二 位的指令,前面加一个 d, 就是三十二位的 说明书,上面有说明允许设定范围啊,是 y 零和 y 一,只能用这两个脉冲蹲口。 我们再来看一下输出脉冲数当前值监控, 当我们发脉冲的脉冲口是 y 零的时候,那么我们就监控这个 d 八幺四零, 如果说是 y 一的时候,那么我们就监控 d 八幺四二。我们来看一下成 程序就是这条三十二位的 d p l h y 指令,第一个这个开两键是频率, k 六千是脉冲数, y 零是发脉冲的, 当我们按下 h 零的时候,接通 m 零,然后 m 零接通,就执行这条 p l h y 指令。 当我们这个 k 六千脉冲数发完以后,他这个特殊辅助继电器 m 八零二九就接通,然后就把这个 m 零给复位 会掉。当我们需要反转的时候,我们就要接通这个 m 一, m 一接通这个 y 三, y 三是一个方向的信号, 我们再来看一下上面这条程序, m 八千一直接通, 然后这个 d 八幺四零是 y 零的当前值,把这个是一个传送指令,把当前值传送到 d 幺零里面, 我们来现在按下这个启动开关 s 零,他从这个地方发脉冲,发六千个脉冲,到这个地方发完脉冲以后他就会停止下来。 如果说我们需要反转的话,我们需要往这边走的话,那么我们就需要接通这个 m 一这个方向的信号,他就会往这边这边走, 它就会反转往这边走,我们来接通这个 m 一, 我们来接通这个 m 一, 然后按下这个启动开关,他就会往反转, 我们接通那个方向进号之后,这个步进电机的话就会反转,如果需要正转的话,那么这个 m 一的话,我们就断开就可以了,我们现在在程序里面把它断开, 现在我们按下这个启动开关之后,他就会往正方向走,我们来 好了,这个就是 p l h y 指令的使用方法,如果有什么不懂的话可以在评论区留言。
 00:59查看AI文稿AI文稿
00:59查看AI文稿AI文稿呃,这里说一下啊,松线圈输出的时候要注意的地方,无论是森林和西门子还是其他品牌的 plc。 呃,原则上是不允许松线圈输出。什么叫松线圈呢?比如说我们程序里边第零行和第二行这里 同时控制 y 零,这种是不允许的。如果我们想实现这个功能, s 零和 s 一都要控制 y 零,我们可以通过第四行和第六行分别控制 m 零和 m 一,而通过第八行 m 呢和 m 一并列去控制 y 零,这就实现了 s 零和 s 一都能控制 y 零的功能。 还有一种方式就是三菱特有的,西门子是不可以的,三菱有一种是呃,不禁指令,在不禁指令里面是可以写创新圈的,比如这里面 s 零的时候我们驱动外衣,在 s 一执行的时候我们也驱动外衣这种。
31拼搏 07:34查看AI文稿AI文稿
07:34查看AI文稿AI文稿这节课我们讲魔力量输出,首先我们看一下魔力量输出的一个参数设置,呃,魔力量输出在我们的一个参数模块参数,然后魔力量输出这里双击打开啊,首先看基本设置, 呃,这个地方我们选允许,允许啊,然后呃应用设置, 呃应用设置呢?第一个就是他的一个报警的一个输出功能啊,如果我们需要啊,他的一个报警,哎,我们这里就选择允许哈啊,如果不需要的话就选择一个禁止。 呃,如果我们选择了这个,呃报警的一个功能啊,这里就要设置他的一个上线 和他的一个下线值,我们这个值设置好以后呢,如果我们的一个输出啊大于那他的一个上限值的话,那我们的输出就固定为一个他的一个报警的一个上限值,同时啊他会给出一个报警, 哎,如果你低于他的一个下线词啊,他就输出啊,输出词来就变成我们的一个报警的这个下线词同出,同时呢给出他的一个下线报警, 好。第二个就是一个比例缩放的一个设置,就正常情况呢,就我们的一个输出,他是零到四千的啊,一个值,然后对应啊零到十伏的一个电压值, 有时候呢就是为了一个方便啊,比如说像我们这节课讲的一个,就是用我们的一个模拟量去控制变频器的一个呃频率,哎,变频器的一个频率呢?他是零到六十赫兹, 哎,如果我们用直接用零到四千的话,那我们还要去这些程序去转换,用四千最大,然后对应他的一个六十赫兹, 呃,如果为了方便,我们就直接在这里做一个缩放啊,就说他我们这里个上限值,对呃六百, 如果我们对应六十也是可以的,就是他的一个呃最小的一个精度就是一赫兹,如果我们对应六百的话,就是对应就六百,就是对应他的一个呃六十赫兹,也就相当于是零点一赫兹的一个精度, 相对来说呢,他的一个呃精度我们提高了啊,这个地方我们就说这样设置好以后,我们啊在他的一个特殊集成器里面,我们输出六百啊,他就自动会去输出一个四千的一个值。 如果我们这里不启用的话,你要输出啊四千的话就对应师傅,那我们就呃要去计算器里面,就是说特使计算器里面输出四千就对应师傅 啊,师傅来就对应他的一个六十赫兹,这样的经过转换以后,哎,就感觉有点麻烦。我们这样的话六百,我们输出六百就对应他的一个六十赫兹,输出五百就对应五十赫兹 啊,这样这个比较方便一点。这里有一个移位功能,如果我们设置了一个直的话 啊,比如说我们是零的话,就相当于是没用。如果我们设置一百,那我们这里呃输出一个值啊,比如说出零,哎一百,然后我们就要加上这个移位功能的一百,就是两百 啊,他的一个移位功能相当于是去调我们的一个零点啊,比如说我们输出零的时候,呃这个变频器呢?他可能他的一个呃频率他就不为零,他可能为其他值,哎,我们这里就呃去调这个移位功能,就将他的一个零点给他调成零。 好,这里有个魔力输出这个纸呢,就说,比如说我们啊 pc 发生停止啊, 啊,还是发生一些错误啊?啊,他我们的一个魔力量口输出的一个子,正常呢,我们用的这个就是一个清除, 相当于是输出零了。呃,上侧值啊,就是我们上一次就发生错误之前输出的一个值啊,比如说是六侧值,那他就,哎,我们一直输出六十, 还有一个设定桌,如果我们选择设定纸啊,就在这个地方啊设置一个纸,而正常情况我们就选择这个啊,就相当于犯错误啊,或者停停止啊,这些情况,我们的一个磨练量输出口啊,他就不输出, 就这个意思。好,现在我们来看一下他的一个特殊的一些寄存器。好,这个地方呢,我们要用的就是 sd 六幺八零啊,就这个字, 哎,其他值呢,我们就在这个,嗯,软件里面去设置就可以了啊,这个值,我们写程序的时候啊,比如说你要输出六十二值, 哎,我们刚才那里有个缩放,已经设置了六,设置就对应六百五设置对应五百啊,直接将这个纸放到 sd, 呃,六幺八零里面就可以了。 然后我们还会用到他的一个,呃,特殊继电器啊,这里第一个就是一个上线报警啊,下线报警, 哎,而且他那个报警呢,就说他割出来了,割出来,比如说我们上线报警是六百,那我们割出一个值六百以上的,然后他就一个对 sm 六幺九幺 啊,这个值,这个报警值,报警计电器,他就会执意,执意后呢,就算我们啊输出的一个值小于六百啊,他这个啊也不会消失,我们必须就将这个报警清楚,就这样 二六二幺七啊,这个直一下胃啊,他才会,哎,就说这个报警才会清除掉。 好,现在我们来看一下他的一个配线啊,这个是我们这个 p c p c 这边的就 d a 就输出的 啊,微加就是输出一个啊,正电压的就微负,相当于是一个零负的,然后就拉在我们这个变频器这边 啊,因为他输出是一个电压子,所以这边变频器这边呢要呃接到我们 a v i 和间低这里啊, 如果他是电流质的话,我们就要接到 aci 这里,因为他是一个电压子,所以我们这里要接到 aui 这里。好,现在我们再来 来看一下啊,程序 好,这个程序很简单哈,就是首先就是我们第一排将我们的一个频率传到我们的 sd 六幺八零里面啊,传进去就可以了。 然后呢很多 m 零 m 幺啊,就是启动一个正转反转的。 好,这里我们一个变频器的一个参数就 p 零零和 p 零幺啊,设成零零幺就是就可以了,他的一个意思呢就是说,哎,我们的一个模拟量去控制他的一个频率,然后我们的一个呃端子, 就外部的一个端子就是 m 零 m 一,控制他的一个正转反转。 好,现在我们来将程序啊下下去。
 10:23查看AI文稿AI文稿
10:23查看AI文稿AI文稿分鸟先飞和陈老师学公控,我们继续学习功能责令,这一期我们主要讲解基本输出指令,责令所在的手册,大家可以关注一个 app, 点开手机应用商店,搜索公控技术平台 啊,就能找到这个 app, 我们的手册呢,就可以在这里面去查找到 我们。好,我们来看一下这个输出指令啊,输出指令呢,主要有这几条啊, 那么下面这两条呢,我们一般就比较少用啊,主要是上前面这三条啊,我们来看一下, out 呢,是一个输柱子灵啊,他对象呢?可以是啊, oup 风格,五二零,其实我们在输入的时候,其实我们直接输五二零,他就会直接帮我们啊,输出了这个 out 之类啊,或者说我们按一下快捷键的 f 七,那么他弹出来的这个线圈啊,就是 oup 就输出啊, 这个相关就是我们的线圈了啊, 那么他的对象呢?可以是啊, y 点, m 点, s 点啊,比如说 m 零线圈啊, s 零线圈啊,一旦这个线圈导通了,那么他所对应的触点就会动作,比如说 y 零导通了,那么他对应的这一个触点啊, y 零的长开触点呢?长臂触点啊,他都会动作啊, 好,然后呢,他也可以是这一个定时器啊,技术器啊,是吧,这些啊,别说 t 零空格,开始啊,这个是定时器,另一个一秒钟啊, t 这个 c 零空格 啊,开始啊,就计数器,计时测啊,还可以是一些特殊的这个位啊,比如说一零点零,那么这种呢,是一个, 这是一个姬存器的未源键啊,一零点零啊,我,我们来数一下啊, oup 空格,一零点零 回去,好,那么他也能输出来啊,或者说我们直接按 f 七这个一,零点零啊,也能把它输出来啊,零点零零,零点一啊,到零点 f 啊,总共是十六位。好,这个是关 输出责令啊,我们要关注的就是他的这个对象可以是哪一些啊?好,那么输出责令呢?我们再来写一条啊,比如说我们写一个触点给他,那么当前面的条件倒通之后,那么他就会动作啊, 外林的长臂,我们来观察一下这一个他的一些现象啊。 好,导通啊,你可以发现啊,当这个线圈通电的时候,他常开触点就会导通,长臂触点就会乱开啊。好,当然这个线圈啊,我们在一,在一个程序里面,我们啊出血脂,我们就要求大家不能 出现两个这样相同的线圈,否则会出问题啊,比如说我们来看一下啊,如果我写两个线圈,那么会有什么现象呢?哎, 好,我们通通过这个地方,我们来学学一个比较重点的知识点啊,不要小看这个线圈,这个,这个很简单啊。好,我们来抖动一下这个,哎,可是当我们 s 领导通,哎, 你发现他的触点并没有动作,是吧?好,放开,好,我们打通一下这个,哎,好,那么你会发现他这里动作了,是不是?好, 所以说我们如果是两个线圈的话,他是以最后面这一个为准,为准啊,作为最后的输出。但是来,我们来再来观察一个这个这种现象,我把这行写到中间里面来啊,那么大大 等一下可以就可以观察到一个比较奇怪的现象啊,也是很多初学者理解不了的一个现象。 好,当我们脑通这个 x 零的时候,哎, 啊,这个歪铃会通电,歪铃通电之后,这个应该会动作,这个会断开啊,等一下我把这两个分别给他单独输出一下啊, 不然的话不好理解,麻烦写成这样啊。好,再来一遍, 好,那么当我们把这个触点打通的时候,你会发现,哎,这个为什么有输出啊?断开好,打通这个的时候啊,这个看起来有输出,但是这里并这行并没有输出,是不是很奇怪? 好嘞,我们来研究一下啊,导通这里的时候,这里是没有,看起来是没有输出的啊,两个外铃都没有输出,但是这里偏偏导通了,这里 这里偏偏不倒通,看到这个现象没有啊,当我断开的时候,哎,这两个状态就反过来好,那么这其实要涉及到我们这个 poc 的扫描周期,他的工作的顺序 程序呢?一般是从上往下一行一行的扫描的,他先扫描这个触点,哎,这个触点如果我是 导通的好,那么这里也导通好。这在这个这个时候他是通电的,他是有输出的好,扫描现行好, y 零,他既然他线下有输出,那么这里就是导通的 好,那么这里是导通的线圈,就应该有输出好,由于前面这里有输出,所以这里是断开的,被断开的,所以说这里没有输出。在扫描下行的时候啊,这里是断开的,歪铃没有输出,所以最终的结果 歪铃是断开的,你看起来都是断开的,但是他在运行的过程中,他会控制这些输出啊,中间的过程他会运行,那他最终的结果他是以最后一个作为标准,我们最后的状态是什么,他就显示为最后的 状态,但是他在中间的运行的过程中,他产生一些过程的值,那么这里会运行好这一点, 这点是比较难理解,但初学者啊,不要求你很深刻的去去了解到这一个他这个运行的过程,因为我们有很多案例啊,会, 会去着重去分析这个扫描中这些过程啊,这个放到我们以后啊,课程去讲解啊,那么现在我们要了解到到底就是说,哎,这个线双线圈呢,就是我们初学者尽量不要出现 啊,因为很多时候你分析不了,分析不了啊,那我们学到一定水平了之后,哎,你再出现这双进圈,哎,那没问题了,好,好,这是关于这个 out 指令啊,输出啊,不能双进圈啊, 好,那么第二个责令呢,叫做自卫,还有复位啊,自卫呢,他就是把一个点至为 o 啊,作为 o 啊,我们,我们来看一下啊,我们以 y 一为例啊, set y 一啊,还有一个是 r a t 啊, y 一, 好,我们用一个歪一的常开触点来作为监看啊啊,输出一个歪式。好,这边给一个 x 一还有 x 二的按钮, 好,我们监控一下啊,这位指令呢,他,他就是当我们导通的时候,他会控制这个输出,一直有输出啊,比如说我们 x 一,我们导通他啊,那么这个 乱开之后,他还保持肢体之前的这个现象,这个叫滋味啊,那么复位指令呢,我们脑通 他,那么他就把这个点给他清空啊,我按开按钮,他也保持这个清空的状态。而我们线圈呢,大家观察一下啊,好,线圈打通就打通,断开的时候他就断开 啊,线圈是这样的啊,你倒通他就倒通,你断开他就没有了啊,而这位指令呢,还有副指令呢,他是能保持的啊,我倒倒通他,好,那么他就把这个点置为 ong 断开,那么他这个点依然保持这个 o 的状态啊,负位责任。哎, 好,那么他们的控制对象呢?就有哎,比如说 m 点啊, y 点呢啊,你,你多少点多少啊,这些都能够去控制啊,都是一些未原件,而复位者令呢,他所复位的,他不单者可以 复位这些会员键啊, x 啊,这个 y 点的, m 点的等等,他还可以复位计算器啊,比如说啊 lt 啊,莅临 rtrj 零啊, rtrt 零啊,这些元件都可以啊,他所控制的对象就比较多,比较多。 好,然后呢,我们再给大家介绍一个啊,比较重要的一个复位责令啊,叫做批量复位责令啊,比如说我现在写一个责令啊, 啊,一件 lat 啊, y 零到 y 一百,好,那么这样指令呢,就是把 y 零到 y 一百之间所有的原件都清空,复啊,一件 lat 啊,哇啊,这个 m 零到 m 一百,那么他的 控制对象的跟复位指令是一样的啊,复位指令能控制哪一些,那么他这个批量复位就能控制哪一些啊,大家可以参考一下。 好,然后呢,下面这两个责令呢,是关于严脉冲责令,一般我们不会用到啊,暂时我就先不讲啊,好,如果喜欢我视频的同学啊,可以点赞加关注,谢谢大家。
157工控笨鸟


