pdps如何导入库卡机器人离线程序

粉丝166获赞1353
相关视频
 01:32查看AI文稿AI文稿
01:32查看AI文稿AI文稿打开 poops 软件, 选择根目录创建新项目, 导入机器人数模,选择机器人数模,插入组件,放大画面, 选择酷卡机器人数模, 点击图标拖动机器人, 点击移动图标, 机器人直线运动机器人关节运动 库卡机器人关节直线运动关节运动。 切换视图, 再次拖动机器人移动位置。 谢谢观看,你学到了吗?
356编程自动化 11:20查看AI文稿AI文稿
11:20查看AI文稿AI文稿大家好,我是小木, 从今天开始我们来介绍机器人运动机构的制作,那么这一期我们先来介绍一下机器人模型文件格式转换与导入仿真软件的操作方法。市面上常见品牌的工业机器人 都可以在他们的官网上下载到完整的三 d 模型,如 abb、 库卡、科玛、史陶、比尔等。 有些工业机器人厂商甚至可以直接下载到支持 p d、 p、 s 使用的 j、 t 格式的模型文件,如 a、 b、 b 库卡。但是大部分机器人厂商只提供 s t、 e p、 a j e s 等中间格式的模型文件,那么对于这种只 提供中间格式的机器人模型,该如何制作他的运动机构呢? 我们以 a、 b b 机器人家族的 i r b 六七零零幺五五二八五型号的机器人为例, 这是我从 a、 b、 b 机器人官网上下载的机器人模型,模型文件是 s t、 e p 格式的,当然这款机器人厂家也提供了 j t 格式的模型文件,可以看到它是一个压缩包,我们先来解压一下, 从这里可以看到,厂家提供的模型文件是机器人的零部件,并不是一个 完整的装配体,每一个零部件的文件都是 scp 格式的。 对于这种零部件形式的模型,我们先要在机械设计软件中把它装配起来,我们使用的软件是卡地亚, 这里我们可以点击。开始在机械设计这里我们点击装配设计,然后我们点击具有定位的现有部件, 然后点击一下产品。一,浏览到我们解压出来的机器人 scp 格式的零部件文件,我们把它全选,点击打开, 全部打开之后他是这个样子的,我们可以先点击一下确定 这些个信息提示框,我们也点击一下确定, 可以看到它的外面包裹了一层机器人运动范围的模型,也就是对应的这个文件,我们可以给它隐藏一下,这样就显示出了机器人模型,我们可以点击一下它, 然后把它放大一下。机器人是非常完整的,这里由于我们不需要它的运动范围的模型,所以我们可以把它直接删除掉。 他弹出的这个警告提示框,我们直接点击一下,然后我们可以修改一下机器人的颜色,从他的底座平衡高关节三, 关节四,关节五关节六,平衡缸的连杆关节一,关节二,我们把它的颜色全部设置为白色, 剩下的这些都是他的管线包模型,我们也给他修改一下颜色, 把它设置为黑色。 然后我们修改一下装备体文件的名称,我们把它叫做, 就叫做这个名称, 然后把它进行音效保存, 保存的文件格式是卡地亚装配 t 文件格式,我们点击一下保存,点击是这样机器人模型就被装配起来了。 在前几期的介绍中,我们知道 p d p s 软件支持导入的外部模型文件格式是带有 c o g t 格文件的 g t 格式文件,而我们在卡地亚软件中装配好的模型文件保存的文件格式是 这种格式的,也就是卡地亚的装配体文件格式。所以在导入 pdps 软件之前,我们先要进行一下模型文件 格式的转换。魔性文件格式转换工具,我们使用 pros manager 这个软件,我们前几期介绍魔性文件数据处理的时候也介绍过了, 这里我们要将输入格式设置为卡地亚 v 五的三维模型文件格式,输出格式设置为 jt 文件格式,然后我们把它拖拽进来,点击执行转换, 这里显示确认之后,模型文件的格式就转换完成了。在这里我们可以看到转换完成的模型文件,我们可以双击一下他 用 j t 图勾软件就可以打开 j t 格式的模型文件, 可以看到这就是我们装配好的机器人模型,它是没有问题的,我们可以把它关了。然后我们要在这个 j t 格式文件的外面加一个 c u j t 的壳文件,我们可以先复制一下它的名称, 然后我们新建一个文件夹后缀,我们直接输入点 c o g, 然后把它拖拽进来,这样就在 g t 格式的机器人模型文件外面加了一个 c o g t 的壳文件。当然如果是批量生成这个壳文件, 我们可以用批处理文件,那么批处理文件的制作可以看一下前面介绍过的相关内容,这里就不再过多介绍了,我们把它复制粘贴到仿真项目文件目录当中, 我们继续使用我们制作焊枪与工装家具的这个仿真项目。在这里我们可以新建一个文件件,它的名称是 机器人,我们把它粘贴进来, 回到仿真软件,这个时候我们就可以把机器人模型导入 ps 软件了,我们还是先看一下软件的仿真项目文件夹是否设置正确,从这里可以看到还是没有问题的, 然后我们点击一下打开,我们先打开工装家具运动机构制作的仿真项目, 这里可以看到我们上一期制作的工装家具模型 型,我们先把它隐藏一下,然后我们点击 model 领,点击正义组建类型, 这里我们可以看到啊,已经直接定位到我们粘贴的机器人模型了,由于我之前测试过,所以他会直接定位到,如果是没有定位到的话,可以在这里进行文件夹的点选,并找到我们粘贴的机器人模型, 然后我们点击确定,在这个对话框当中我们要选择一下模型的类型, 我们选择机器人,点击, ok, 点击确定,然后点击插入组件,同样 他也会直接定位到,也是因为我之前进行了测试,如果这里没有直接定位到,可以在这里进行文件夹的选择, 我们选选它,点击打开,这样机器人模型就被导入 ps 软件了,我们可以点击一下它, 那么这就是我们的机器人模型,他已经被成功导入了。以上就是机器人模型文件格式转换与导入仿真软件的操作方法,我们可以对仿真项目进行一下保存,这里选择另存为 文件名称,我们就叫做 第四节机器人运动机构的制作,点击一下保存 好了,今天的视频就到这里,我是小木带给您使用的工业机器人技术,如果您喜欢欢迎点个关注,点个赞,如果您有工业机器人技术方面的疑问, 可以在评论区告诉我,感谢您的支持,咱们下期见。
134工业机器人虚拟调试 02:41查看AI文稿AI文稿
02:41查看AI文稿AI文稿库卡机器人的 ptb 指令如何使用呢?首先我们要知道 ptb 指令又称为点到点运动,同时他所做的运动称为关节运动, 关节运动指的是什么呢?他指的是各个轴之间配合从一个点到达另一个点所做的运动过程。 五、如果我们要在程序中使用 pdp 指令,这个时候如何使用呢?首先我们打开一个空白的模板, 进入里面之后,我们可以通过动作将 ptp 指令调用出来,同时呢也可以通过指令里面选择动作,然后再选 选择 ptp 指令,将 ptp 指令调用出来。如果我们现在要从一个点到达另一个点,这个时候我们怎么编程呢? 首先我们也是选择动作,将 pgb 指令调用出来之后,给我们的点位命名,在命名完成之后,我们再将机器人从这个位置移动到我们想要的位置。 当我们将机器人移移至到这个点位之后,我们选择试教,选择确认这个点位,选择试,然后指令 ok, 同时我们又将下一个点的 ptb 指令调用出来,此时我们也选择动 做里面,然后选择 pgp, 然后再将点位命名,命名完成之后,我们再次将机器人以制到我们下一个点位进行试教。 当我们移至到这个点位之后,我们选择试教器上的试教,选择试,然后再指令 ok, 选择试, 这个时候呢,我们从 p 一到 p 二点的一个 ptp 运动就编写完成,此时我们来看一下他是如何运动的。 此时我们给我们的机器人上十人,并启动程序, 大家可以明显的看到他做的是一个关节运动,我们库卡机器人 ptp 指令的介绍就到此结束。
79天天智培周老师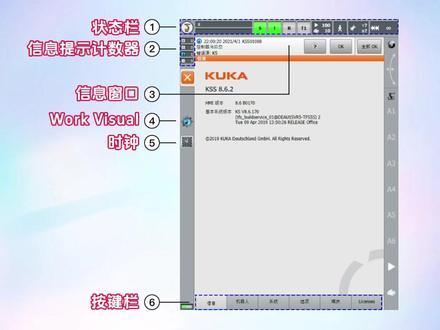 00:18查看AI文稿AI文稿
00:18查看AI文稿AI文稿库卡机器人视角器操作界面介绍状态栏信息提示技术器信息窗口 work visual 时钟按键栏状态显示空间鼠标显示空间鼠标定位状态显示运行键运动键标记程序倍率、手动倍率。
 00:506工控小鸟
00:506工控小鸟 01:30
01:30











