RT-thread OSD设置

粉丝704获赞2188
相关视频
 01:08查看AI文稿AI文稿
01:08查看AI文稿AI文稿俗话说,努力是有回报的。大家好,我是家范,今天收到 artistry 颁发的 artistry 社区技术商家的认证证书。 自从参与 rtca 的社区共建,我多次贡献了多个 bsp 以及多个软件包,也写了很多关于 rtca 的技术文章。软件包方面,比如 ai 推理顾 tiny mac 高压缩率的压缩库, lgma 触摸芯片 gt。 九幺幺的驱动,不需要硬件支持无线扩展的闹钟组件, 能够让代码高度绝偶的 ib 组件,跨平台的现成词组件, as 七三四幺的驱动,还有一个 化平台实时系统基准测试框架。文章的内容包括 bsp 的移植驱动框架的讲解,以及 g rt three 的 diy 项目的分享,欢迎大家关注,我将继续分享关于 rt three 的内容。
31Rice嵌入式 00:57查看AI文稿AI文稿
00:57查看AI文稿AI文稿你们还用裸机的方式去开发单片机吗?其实我大学的时候也是采用了很多裸机的方式去开发了很多项目, 比如说这一个菲斯卡尔的智能车,还有就是这个挑战杯的高速公路预警系统,这些我都是采用裸机的方式去开发的,但是会发现他们开发起来非常的困难。 自从我学了 autos 之后,我发现用 autos 的方式去开发单片机,它是非常方便的。比如这一个桌面小工具,还有这一个平衡车,我都是采用了 rtc 这个操作系统去开发的,它开发起来非常的方便,非常的便捷。 接下来我也可以利用这个 rt three 的一个官方学习开发版星火一号,带你如何通过裸机开发到 rt three 的一个开发过程,并且利用 rt three 这一个 autos 来做实际的项目。
49Rice嵌入式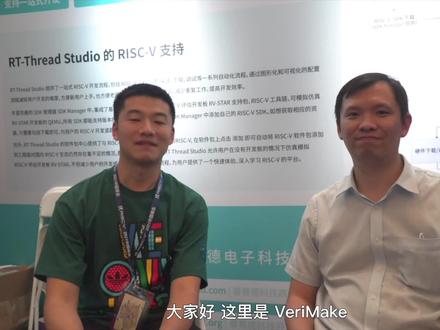 10:32查看AI文稿AI文稿
10:32查看AI文稿AI文稿大家好,这里是 worm max, 我们今天非常有幸能够邀请到阿迪斯瑞的创始人,那么熊总先和我们的各位 b 站网友打个招呼吧。大家好,我是熊富强。 那么应各位网友的一些提问,那么今天我们这里向总总提出一些问题,那么总总也知道现在随着电子 计算机相关技术在我国越来越非常的火热,那么有更多的同学投身到电子计算机相关专业来,那么就有很多朋友就会有这样的疑问,嗯,针对于像互联网这样的平台,又离不开实时操作系统,那么同学们应该怎样去入门去学习这样一个 领域呢?你有什么相关的建议?好啊啊,那好看,那对于这种一个实操系统平台,实操系统啊,那去学习的话 跟他,嗯,像,比如说, ok, 那第一阿克苏,二来去学习啊,那嗯,首先可以是去多去看一些相关的一些这种,比如说你的一些文档啊, 那,呃,整个这上面,那会涉及到这个安全关系的这种基础的理论,那做任务的这种或者说调度也好,那这种通信故事这种也好啊,所以那整个这块是一些总基础的一些理论,那 可以先做一些简单一些这个学习,然后在整个这里面最重要最重要的一点是说我给在这个后续的一些实际的一个实践啊, 比如说这个时候, ok, 那不管是说是,呃,用一个软件软件的一个网格的平台,那,还是说是在一个实际的一个那个硬件板子上,那实际的去跑一跑, 那同时在这个过程当中哈也能够去自己去写一些这种小的见证程序啊,或者说甚至说一些一种有趣的程序,那在这个实际的感情上面去跑一跑,然后把整个这个过程都可以去完完整整的去体验过一遍, 通过这个一个语文学习,然后也包括实际实践的这种公式,哈,那其实 ok 就可以做一个出的一些这种入门的啊。再再往后呢?那如果说,呃, 希望是深入一些,来去来去学习的时候,那我看那就是可以去做一些更多一些,像比如说真的有啊, 长度的一些这个这个这种小玩具这种制作啊,或者说一些非常有兴趣的一些这种这种,呃,这种,呃这种风景啊,像比如说一些这种智能小车啊,或者说一些 那 ok 呢?我们这个万物互联这种互联网的一些和联网相关的一些这种这种 m 等等等等。所以通过这个方式的话,也可以去加征你在这种基础的理论的这种啊之外的啊,一些偏黑,怎么把这个更好的用起来? 好,那么就像熊总,熊总您刚才提到了,那么通常我们入门就可以总结一下,就是先多看文档,然后了解一些实操这种相关基础知识,然后当然也不要离开与实际的结合,最好能够结合开放版实际的上手操作,然后再到今后一步步拓展啊。 那那么就像您讲到这样需要结合到开花板,那么正如这次我们是在不是大比赛的峰会上,那么就又会有很多同学会问到,因为平日里我们最常 接触的是类似于 sgmx 二这样子与 rm 平台合伙版,然后我们也知道阿迪斯瑞的也在大力支持瑞士 fex 这样的一个直升机架构,那么 我们知道瑞斯 f 和阿迪夫瑞的有个共和气特点就是开源,嗯,那么针对一个开源这样架构,那么瑞斯 f 又各种各样,各家有不同的指令的支持。那么在这一点上,如果同学们想在那个瑞斯快布这样的平台上实现一些工程的实践的话,那么 阿迪斯瑞的在这一方面的支持是在,嗯,简单介绍一下,嗯,好看。好啊,那,呃,在整个这块阿迪帅我给大家在 在这方面,他其实是作为一个这个招聘平台而存在的,那他是用来去管理以前的这个硬件这个相关的啊,所以 ok 呢。呃,在阿木的还说的快乐上面的那个不同点啊,那其实 我是在底层,在下层,那在,在底层,那我现在会有超进一个块的一些,呃,意念芯片移植相关溶解,然后那也有一些是驱动这里的一些相关溶解,那当把底层的驱动移植 新定制都做好之后,那其实我感觉那在上层这个要去写一些应用的时候,写一些这个代码逻辑的时候,那其实那 ready 的和阿姆的那他其实是一样的。 怎么样的?所以有的说,那当你对于阿基帅熟悉的时候,那不管是说你要去获获得那些其他平台, 要去矿产量维生素的平台,那都是属于非常有利的,只要阿基率支持这么一个平台,这么一颗心点,所以在整个这块,那 ok 呢,我们现在阿基率已经支持了大量的 一些 vxcam 的一些这种芯片的,像比如说这对 air 的这种配奥林的芯片,那针对,针对这种蓝牙的啊,周克兰逊的芯片,那未来的话奥特曼也还会有更多的像一些 wifi 芯片的这个知识啊。那在这个具体上面当去呃 使用了这么一个知识,这一系列平台的这个阿迪帅德超信用平台之后,超出信用之后啊,那就叫 ok, 那上面应用的构建、应用的编写啊,其实都是一样的, 所以这个也是属于我看到阿克苏作为一个操控平台给到大家提供的这样一个平台的一个人。 那么阿迪斯瑞呢?作为一个开元的平台很冲动,您认为和国际上的一些过往已有的这种实施 操作系统优势可能体现在什么地方呢?类似于 misios 或者是菲亚 tos 加,那么而且作为一个国产的开源的这样一个实时操作系统,您您认为我们的优势在在哪里?然后今后我们怎样能够体现出你的差异呢?嗯嗯, ok, 那阿迪帅做一个十这个超级统和像呃一些国外的一些这种,比如说我跟那老韩那些这个唱唱产品,像,比如说游水玩室或者说浮压套式相比啊,那阿迪帅其实他是一个呃, 有着一个这么硬实实能力的实时的操作系统,然后一个内核,那除了这个内核之外,那奥特曼他其实还有周边一系列的这个相关的这种基础的组建啊,像比如说文体系统,比如说我们 一站,比如说那我们很好用的这个名人的这个工具啊,然后比如说在这上面还有我们非常完整的这个 pos 的这个 ats 接口啊, 然后在这个普天之上,我看到我们还有很多一系列大量的我们国内这个社区的供应过来的一些一系列这种软件包, 会有那个非常非常多的一系列对公众的支持,对, ok, 那,呃,将相对应的和和由自由而舍,不然的话互相比较啊,那 ok, 那他们可能是属于更多是一个,那个更多是一个核心啊, 所以在在一些点上,那其实阿克苏啊,其实他的整个的眼睛的范围会更更大更宽啊。然后在于我们自己本身来说,我们其实我感到是期望他是一个开放和推荐医用的一个超平的平台,这个就是说 我们的一个愿望,那他是属于一个开源的,那同时也是从大家去使用的时候是一个用起来非常辛苦的一个产品。 明白了,嗯,那么我们也也知道阿迪斯瑞的诞生于零六年前后,然后他也是个开元的平台,那么啊,中国没有什么,呃, 从零六年至今,然后我们叫瑞,那么瑞 f f 的正式的为例是差不多那样情况,那么实际上我们可以看到两者是有很大的重合性,因为大家都是开元作为你们的类似灵魂一样的东西,那么大概这五年走过来,你有很多趣事想分享给大家看到,嗯, 看看。好啊,那阿迪说本身一出来时候就是以一个这种开源方式来去往后去引进来去发展的啊,所以开源开源的模式 其实是会让更多的小伙伴一起来去参与一聚,参与到这个社区里面去,大家一起来去玩,一起来去推动这个事情往前去走,所以要看看相对应的,那和 这是我们的这个一系列这个社区的小伙伴们,那其中一些这个故事以后非常的多啊。那当在早期的时候,那像比如说在零几年的时候,那看到我们我们最初期的时候,那,那那个时候当然是属于一个相对呃这个这个受众人群比较小的那个时候, 所以呃在整个证明我们也会去推进一系列这种线下的一些这种活动啊。那呃早之前的时候就是说有过那一场线下的活动,那只有两个人,那我一个人,然后另外一个害怕这后后面多的时候,那其实也也有过像应该说这个事情的主不主动过程啊,从两个人 到三十个人啊,五六个人这么一个模式啊。那但是在整个这个里面前期那你确实是经历过很长一段时间,那 整个这块人人数并不是太多的人这个状态。但是在这个上面,我们依然是本着我们开源做社区社区的这种方式,一步步走来,走到今,走到今天, 然后那随着整个他需要的他的一个影响力厚重,大家对他的认可,那逐渐逐渐也越来越多的人去喜欢他, 喜欢上他了啊。所以 ok 呢,在后续的一些这种啊,像比如说一些这种沙龙,那或者说 ok 呢,我们的一些这个开发会的。嗯,那那种一些这种线上活动点啊,我们现在 ok 呢,有时候会经常遇到遇到一个点像比如说 ok 呢,比如说呃我们 要在上海这边举行举办一个活动,那就是说有一些小伙伴,那他们是一大早的,咱们,呃,四五点钟,那除外地啊? 来去赶,赶过来,赶到上海来参加这个活动啊。所以, ok, 那这个其实就是一系列这个社区的模式,社区的方式,大家一起来去做这个事情,一起来去往前去推进,然后去做一个好的事情。 那么我们 r max 也衷心祝愿阿克苏也能发展越来越好,然后再次感谢熊总能够接受我们的采访,谢谢。嗯,好,谢谢。
 11:37
11:37 00:30查看AI文稿AI文稿
00:30查看AI文稿AI文稿artistride 是一款已开元、中立、社区化发展起来的物联网操作系统,主要采用 c 语言编写,可快速移植到多种主流 mcu, 即模组芯片上,面向对象的设计方法应用到实时系统设计中,使得代码风格优雅、架构清晰、 系统模块化,并且可裁剪性非常好,实现类似 android 地图形界面及出摸滑动效果、智能语音交互效果等复杂功能。想要了解物联网的记得点赞、收藏关注。
36大杉讲物联网项目 03:03查看AI文稿AI文稿
03:03查看AI文稿AI文稿大家好,我是家放,今天我们来聊聊嵌入式 ai 方面的知识,可能大家认为嵌入式 ai 是只能不甩一些昂贵的芯片上, 那么便宜的这种 mcu 方案是否能够部署 ai 呢?答案肯定是可以的,我最近也在研究嵌入式 ai 方面的知识,发现他有一个非常清亮的一个嵌入式 ai 推理框架叫 tiny max, 它是一个大牛花了两周的时间开发出来的。 tiny miss 已经开源在 gihab 上,我们可以在 gihab 上搜索 tiny miss, 他是一个超清亮的神经网络推理库,可以运行在任意的单片机上面。他具有 代码量少,资源占用少、多种模型的支持,多种芯片架构的支持等特点。我已经将太力妹子制作成 irt three 的软件包,大家可以在官网上搜索, 下面我们来看看如何在 rt three 快速部署起来。首先通过 menu 空 figure 增加 tidy max 的软件包, tiny max 软件包提供了三个视力、物体分类、手写日识别、人物检测、 menu 孔 bigger。 配置好之后,我们进行软件包的下载, 通过命令行更新 q 的工程文件, 打开 q 工程, 点击编译, 点击下载 开发版,连接上创口。第一个视力是物体识别,我们主要识别一个鸟的图片,然后在创口输入命令执行程序, 可以看到检测结果是一只鸟。 第二个四季是手写字识别,首先是一个二的手写字,然后在命令行输入指令, 可以看到最终的识别属于二。第三个视力是人物识别,图片有一个人,然后我们在命令行输入命令, 可以看到检测结果,图片中有人。
85Rice嵌入式 03:25查看AI文稿AI文稿
03:25查看AI文稿AI文稿各位小伙伴们大家好,在之前的视频里我们说要从零制作一台光电吊舱,所以前几期视频我们先后探讨了无刷电机 pid 和卡尔曼绿波的相关知识,有了这些基础知识之后,我们就可以进入下一步了。本期视频我们制作一个简易的资本云台, 那么云台是怎么实现自稳的呢?首先在云台相机的位置有一个 imu 来获取相机姿态, 这里我选用的是 mpo 六零五零,我们把这个传感器获取到的角度、角速度和角加速度经过卡尔曼绿波之后传给云台主控。云台主控选用的是 stm 三二 f 幺零三二 bt 六软件,我使用的是 rtc 瑞的操作系统,这里我创建了两个县城,一个用来处理 mu 数据实现云台自稳,一个用来接受外部控制指令。 主控接收的 mu 数据后,经过 pid 算法处理,就可以得到各个电机的转速,然后传给云台电机驱动部分, 云台驱动部分选用的是将 supfoce 直到 stm 三二的方案,分别驱动抚养电机和横滚电机,实现相机稳定。 有了这个思路之后,我们就可以开始制作了, 到现在为止,这个简易的云台就做好了 重点之后就可以开始工作了,但是我们看到效果很不理想,这是因为我们还没有调整 pid, 所以下一步就是 pid 参数的调整。 经过一段时间的调整,我们可以看到缝养方向基本可以实现自动功能了,但是横滚方向并不理想,这是因为我们采用了单臂设计,但是三 d 打印的结构太软,所以很难调整到一个合适的状态。 我们这期视频的目的是为了让大家理解云台工作的基本原理,其实真正的观念调仓云台设计远比这个云台要复杂的多, 在实际应用中要考虑高低温、电磁干扰、风阻、减震功率等等一系列问题,这些问题都需要整个工程师团队不断的优化测试,才能达到理想的效果。 以上就是本期视频的全部内容,我们下期再见。
611晨哥搞飞机 02:3312嵌入式资深工程师
02:3312嵌入式资深工程师











