卡诺普机器人什么档次

粉丝4209获赞2.8万
相关视频
 03:37查看AI文稿AI文稿
03:37查看AI文稿AI文稿好的,今天的内容是焊接机器人技术里面的直线圆弧,焊接的实线。 关于直线指令,在之前基础部分的应该是第八期的内容中已经做过说明,就不再过多描述了。关于圆弧,我需要更多的来描述一下。机器人用圆弧插补的方式运动至目标点,指令用的是 boof c, 后面其实基本上都一样了,但是呢,人活着呢,后面还需要有对应的,我们要选择 p 一, p 二, p 三我们都可以理解,不在一条直线上面的三个点肯定是可以构成圆弧的, 然后圆弧的编程视力,像图中这样,这里会有 p 一, p 二, p 三。 以下面的一个例子来仔细的描述一下圆弧运动,像图中这样,我们一般称之为姿态圆,这就是一个圆柱体,放在板上面 焊枪需要对应的来焊一个圈,而且过程中需要变换姿态点位的规划。像图中这样,这边我图上面用的是八个点, 也就是说在这个圆上面分成了四个,四段圆弧,也就是说分成了四段圆弧。我们在编写姿态圆的时候,一定需要注意姿态的变化的角度, 尽量避免小距离大姿态的情况出现。像右边这样一个圆,我们可以把它分为四段圆弧来进行编辑,总之 只要是三段圆弧以上,姿态圆就可以实现。另外在取点位的时候,尽量让机器人的坐标点 和姿态都是均分的,这样能让机器人的轨迹走的更为的精确。再说到直线过度圆弧还是比较容易能理解的,从这两个点他还是直线运动,再到这个点还是直线,再继续往下走就变成了圆弧,然后这个程序其实大概是 下面所示的这样一个样子,直线结尾的这一个 ep 用的是 ml 就可以了。下面的两行就是 p 二点, 第三点,这里是相当于直接默认直线末端的点,就是已经是圆弧的起始点了,就可以不用写圆弧运动的 p 一。有个需要注意的点是,如果圆弧需要有一定的 姿态变化,那我们可以在直线的运动的过程中就带上姿态的变化,到圆弧第一个点的同时,先把姿态角度调整到比较合适的角度, 这样可以让程序轨迹更为的流畅,总之就是避免小距离大姿态的情况,这是直线过度圆弧。然后再说连续的圆弧段,其实就是相当于 上一个圆弧的终点,作为下一段圆弧的起点,保证圆弧的连贯性。从这里图片上面可以看得出来,从 p 到 p 三,然后再继续 p 二 p 三,再往下连,连续圆弧的话就是 p 二 p 三,理论上无论这个圆弧他有多少段多长,都可以利用 p 二 p 三一直这样连续的写 p 二 p 三。然后 像如果是连续的圆弧,轨迹精度要求特别高,可以尽量的把连续的圆弧给他细分化,来保证运动轨迹和姿态变化的连贯性。好的,今天的内容就到这里,谢谢。
190卡诺普华北运营中心 04:22查看AI文稿AI文稿
04:22查看AI文稿AI文稿机器人维护保养今天只说最重要的操作部分,更多内容后续在描述,请一定记得看完,并且点赞收藏关注。维护保养一万个小时主要是换油换电池,内容如下, 工具,油纸,电池更换平台整体测试和螺丝的紧固。首先说工具,专用的保养工具箱, 工具箱里面的内容有利扳手,有枪等。工具有利螺丝刀描述如图所示,有利扳手如图所示。张立记后面的视频演示他的用法。 油枪如图所示。使用油枪的步骤,拧开装油拉杆进行装油,装油之后重新安装上单杆,放下 慢速放拉杆油脂准备的东西,一二三种协同 ren 零点零零四五六轴不需要更换减速机油。关于六轴美服 sp2 更换油脂的操作,类似视频这样的操作进行换油 直接插入视频, 视频结束再说。注意点,机器人需要在临位的状态,新油把旧油排出了之后,让对应的关节转动几分钟,让多余的油脂从排油口排出。油脂属于工业废弃物, 遵照当地的规定规章正确的处理。更换电池的操作,直接放视频类似视频中的操作即可。一、拧开电池板螺丝 二、缓慢移出电池板三,取出四,拔插头,取下电池板。五、新电池板拿出对应安装好插头, 确认稳妥。六、插头好了之后重新安装好电池板,视频结束再说。注意的点, 在更换电池的时候,机器人需要通着电,但是一定需要下齿能。另外还有几个注意的点,比如说只能用专用的三点六伏电池, 电池不能丢到水中或者火中,不可以转接电池的正负极,废弃的电池遵照当地规定规章进行正确的处理。关于皮带的张力,直接放视频,类似视频中操作即可, 视频结束。这里有个型号机器人对应皮带张力螺丝颈部。首先一个表格,我们公司所有机器人螺丝扭力的标准。关于螺丝颈部主要是以下几个项需要进行 检查。关于表中的铝机铁机可以参考下面的描述,铁是从最底下部分一直到三轴的 减速机,部分铝件从肘部从三轴的减速机再往上全部都是铝件。好的,谢谢各位。
 01:14查看AI文稿AI文稿
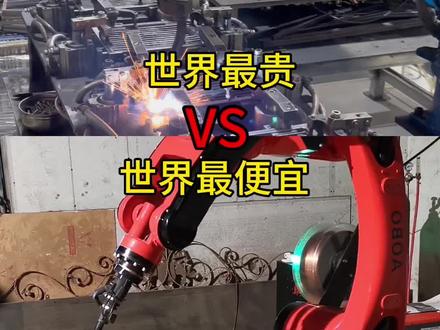
01:14查看AI文稿AI文稿今天我们来测评一下世界上最便宜的焊接机器人和世界上最贵的焊接机器人。秉着公正的评测态度,不吹也不黑,都用点焊放到一起对比。 视频下方是一台号称一万八千五,来自东莞的博朗特,加上焊机和服务费用,其实要四万块左右。上方是来自小日本的安川焊接机器人, 价格在十四万左右,大家可以对比一下移动速度和起伏速度。在同样的时间下,安川焊了十六个焊点,博朗特焊了十个, 安川的产量多百分之六十。其实很多朋友还算漏了一个账,机器人需要配一个六千元左右的上料工,那如果有一万个工件,安川花三十天焊完,博朗特 得花四十八天,那也就是说博朗特要多出十八天的人工成本,也就是三千六百元,同时安装的稳定性和使用寿命都比他高。 在这种情况下,您会选择安川还是博朗特呢?当然博朗特也有它的优势,对于一些简单的直线焊缝,且焊缝少还是可以选用的,毕竟它价格香啊。
485奥博焊接机器人 00:18
00:18 03:05查看AI文稿AI文稿
03:05查看AI文稿AI文稿各位好,今天给大家分享的内容依然是属于基础课程里面的一部分,关于程序的操作。程序的操作我们把它分为几个点, 分别是新建与备份,程序的更名,程序的导入和导出。 从新建和备份开始说起,程序的新建看起来还是相对很简单的,这是主界面,在主界面的左下角有新建, 点击新建,输入程序名,再点击确认,一个程序就新建好了。接下来到程序的备份。程序的备份实际上是将选定的 程序新建为另外一个新的程序,只是他的程序名称不同,内容他是一致的,他的操作光标选定我们想要备份的程序,点击备份,输入新的程序名称,再点击确定, 这样一个程序就备份出来了。然后是程序名的修改,还是很容易就能看得到的。选定我们想要修改的程序名字,左下角新建的旁边就有更名,点击更名,输入想要的一个 名称,点击确定,程序的名字就已经被更换了。有个注意的地方,程序名不能带空格符号,我们建议仅使用中文、英文数字就可以了。 最后是程序的导入导出。先说导出程序导出操作步骤,首先是插 u 盘,接下来是选定我们想要导出的程序,点击右下角的朝背到 u 盘,是否发送程序到 u 盘,点击试 就已经拷贝成功了。可以通过点击打开 u 盘的方式看得到 u 盘里面的程序文件。图中可以看得到文件已经到了, u 盘里面有一个注意的点,这个操作是直接导出程序文件到 u 盘的根目录。 关于程序的导入跟导出的操作其实是有着对应关系的,首先第一步还是插入 u 盘,第二步就是下面的功能 按钮,打开 u 盘,打开 u 盘之后,在界面上面可以看得到 u 盘里面的内容,选定我们想要的这个程序, 选定之后点击拷贝到系统是否发送,点击是程序就被拷贝到了系统内。好的,关于程序的新建、更名、备份、导出,导出就是这些内容,谢谢。 点加号、点红心、点箭头。
 03:54查看AI文稿AI文稿
03:54查看AI文稿AI文稿重要的事情说三遍,相序不能错!相序不能错!相序不能错!好!这次给各位带来的是关于机器人基础部分的 外部轴的添加匹配。在机器人焊接领域,有一些弓箭机器人的焊枪不容易伸过去,那这个时候很有可能我们就用的上旋转轴或者是直线轴之类的外部轴来对弓箭进行调整,或者说更方便的移动机器人 更合适的位置姿态,方便我们进行焊接。以我们机器人最常用的核酸电机来举例子,添加机器人附加轴, 七轴八轴的添加一定会需要的是呃七轴八轴的驱动模块,然后对应的电机,然后线栏方面必须得有动力线和编码器线,这里把图片贴出来,大致是这一些内容, 然后关于这些线路的接法还是利用一个图片来进行描述。动力线、编码线线都需要对应的接好,这里需要有一个重点提示,动力线的向序 一定需要注意,不能接错。重要的事情说三遍,相序不能错!相序不能错!相序不能错!然后编码系线接的足够的牢靠,在线路接好了之后呢?继续说系统相关的参数设置,首先需要点到的是 参数设置,驱动电机匹配里面,这里刷新完了之后可以看得到,我们需要选择对应的电机型号,这个 我们在电机名牌上面可以看得到,按照对应的型号进行选择,日后写入啊,这一步就完成。然后点到参数设置。驱动常用参数有一个比较简单的办法,因为这是合川电机跟机器人 本体里面用的电机,它是一样的,一般来说机器人的外部轴比较常用的是一千瓦、一点五千瓦、两千瓦、三千瓦这些电机,那其实我们可以参考与这个附加轴电机相同功率 的本体轴电机参数来进行写入。比如说一个外部轴电机是一点五千瓦,那可以参考我们 一米四机器人的一点五千瓦的这个二折电机参数,直接照着一模一样给他输入进来,这样就可以了。在驱动电机相关的参数写完了之后, 我们需要进入到厂家权限进机器人零点设置的界面,首次匹配机器人的外部轴,需要对编码器进行复位的一个操作,图片上面可以看到, 选定七轴,按右下角的小房子这个键,加上编码器复位这颗按键,这是组合键,两个按键一起按,然后呢会出现一个弹框去进行确认,这样就算是复位了。七轴的标码器 八轴也是类似的一个操作。到这里这是关于聚动电机编码器整个的一个设置,处理完了之后还需要点到 参数设置机构参数减速比,这是我们外部轴的机械结构方面的参数,一般来说都是直接就有现成的参数 对应的写入就可以了。最后还有一个呢,就是在参数设置四幅参数这一部分,因为我们现在已经具备了七头八轴那对应的七周八周参数也需要的来写入参数设置四幅参数里面的 驱动类型,有这个驱动就是一百,没有这个驱动就是零,那么七轴八轴我们都给他设置为一百,再往上面还会有支付参数里面的电机最高转速,这就参考这个电机的最高转速来进行设置,就 匹配完成了之后,这边界面上面会提示需要进行重启才能进行使用,最后进行重启机器人,这就算是匹配完成了。重启完了之后两个外部轴我们就可以正常的来进行使用了。好的,谢谢。
 02:33查看AI文稿AI文稿
02:33查看AI文稿AI文稿大家好,我是卡路虎机器人的工程师小肖, 今天我们说的是机器人的基本运动和他的几个坐标系。机器人的坐标系,我们把它分为直角坐标、关节坐标、工具坐标和用户坐标。 首先说关节坐标系,关节坐标是机器人沿着各轴的轴线进行单独的正向或者反向旋转动作,他所使用的坐标系叫做关节坐标系, 我们可以动起来演示看一下,好一种,二种 五周好。直角坐标系也叫大地坐标,主要我们需要了解的是它的 xyz, a, b, c, x, y, z 很容易理解,就是迪卡尔坐标系的方向。 a 是围绕 x 轴旋转, b 围绕 y 轴旋转, c 围绕 z 轴旋转。可以演示一下机器人直角坐标走起来的效果。 z 俯这样,鼻子太满俯这样这样的工具坐标系是以工具的间点作为圆点建立的坐标系, 主要是为了在使用过程中能更方便的去移动机器人。好,这边有演示的机器,我们动一下工具做表系, x 正负, z 的正负啊, a 付这样好。用户坐标系主要是当工作台与机器人的安装平面不平行的时候,为了方便移动计算建立的坐标系,我们演示一下看看还是这 four one two three four。











猜你喜欢
- 15.9万老任 财富故事会