平面四杆机构手工制作教程
平面四杆机构运动模拟,先装入第一个连杆, 选择默认作为机架,装入第二个连杆,作为转动曲柄,选择消连接 轴对齐 平面重合, 指定初始角度 装入第第三个零件, 选择消停, 选择平面重合, 再装入第四个零件, 可以拖动一下 应用程序,机构就用四伏电机 选择运动轴,速度收入二十, 新建分析 时间数五十八, 运行 微波一下 调节速度。
粉丝1069获赞2580
相关视频
 26:39查看AI文稿AI文稿
26:39查看AI文稿AI文稿同学们好,这节呢,我们学习作图法设计四个机构。 首先我们看第一类问题啊,两杆预定微距设计四杆机构。我们看第一种情况,如果知道活动角料中心的位置, 如果连杆上两个活动角,这中心 b、 c 的位置是已知的, 他要依据占据三个位置,哪三个位置呢?也就 b 一、 b 二, b 三, c 一, c 二、 c 三占据三个位置。这个时候呢,我们要求的是什么?确定 a 脚链和 d 脚链的位置。 我们知道 b 是绕着 a 做定轴转动了, c 是绕着 d 做定轴转动了。可以说 b 一、 b 二、 b 三在一个圆上, c 一、 c 二、 c 三在一个圆上,那么圆心 b 所在的这个圆的圆心是固定角链 a 的位置, c 所在角链的圆心呢?是固定角链 d 的位置。那么呢,怎么求 c、 d 呢?很简很简单,怎么求呢?那么就是说 做图方法,分别做 b 一、 b 二的垂直平分线和 b 二、 b 三的垂直平分线相交,就得到一个 a 点,因为三点不在一条直接的三点,唯一确定一 一个圆圆心就是 a 点。那么确定的方法呢,就是这个三个点两两相连做垂直平行线,它的焦点就是圆心的位置。 好了,这机会就实现了, 这是已知活动脚链的位置,中心的位置。如果已知固定脚链中心的位置,我们确定活动脚链。怎么确定呢?看这个 我们知道什么,这一个钢体啊,一去炸去什么啊? e、 e、 f 一, e 二, f 二, e 三, f 三,依据炸去这三个位置。而且呢,固定角料 a、 d 的中心的位置。我们知道了,我们也 需要确定 b、 c 角链。注意啊, e、 e、 f e 是连杆二上的,连杆上的一个标线, e 并不是那个固定活动角链 b 的位置, f 并不是活动角链 d 的位置啊,活动角链 c 的位置,我们要确定这个位置,那么怎么确定呢?首先说我们知道了啊, bc 它是它的轨迹是一个圆或者一个圆弧,它是动的,那怎么这是个活动角,怎么能确定呢?我们上节根据我们上节学的机构的倒置原理,要让活动角的成为固定角的,那么怎么办呢?就采用机构的倒置想法,让 ef 所在的构件成为基价。 怎么办呢?我们可以大家可以看是这么做的啊,好了,那怎么办呢?大家看到啊,我们分别连起来,分别连,大家看到这个啊, 我们把这个小方,把这个 a e 二 f 二 d 这个位置啊,小方挪到平移。平移到谁呀? e e f 二和 e e f e 重合, 把 a e 三 f 三 d 这个位置也移,移到什么?移到什么?移到这个 e 三 f 三和 e e f e 重合。具体来说是这么做的,大家看到啊,我们看这个 a e 二 f 二 d, 我把它一挪, 挪到这个位置,先移过来再抓动,哎,就得到了这时候新的位置了啊,这时候以 e f 为基价了,就得到了什么什么 a 撇 d 撇 f e e 就得到这个位置了。 然后呢,再把这个 a、 e 三 f 三 d 也把它进行高性平移, 把它移到这个位置,就得到了什么 a 两撇 d 两撇 f 一 e 一,这个时候呢,也就是原来机构有三个位置,这个时候呢,也变成三个位置,但是注意,这个时候你是站在 e e、 f 一上, 或者是说以 e e、 f e 为基价,观察到了三个位置,这个时候呢,注意,注意啊,这个时候啊,机构的原来的基价上的角链啊, a 有三个位置, a, a 撇 a 两撇 d 有三个位置, d, d 撇 d 两撇。这个时候注意啊, a 是绕着 b 点做定轴转,注意,不是绕着一点啊,是绕着 b 点是做定轴转动的。 那么呢, d、 d 撇 d 两撇是朝着 c 点做定轴转动来,这个时候呢,我们把本来是活动角这 b、 c, 现在变成了固定角这 b、 c 了,那么 a 绕着 b 做定轴转动, d 绕着 c 做定轴转动。那么怎么求呢?就让我们刚才那个啊, 三个点, a, a 撇 a 两撇不在一条直线上决定一个圆,那个圆心就是 b 点。那怎么办呢?我们就两两相连,做垂直平分线,交到这个 b 点, 注意,这个位置是 b 一位置,因为什么?我们假设的是 e、 e、 f 一,为什么为基价的?因为 e 原来的原来的时候,以 a、 d 为基价,有三个位置, e、 e、 f 一, e 二, f 二, e 三, f 三,这个时候呢,我们是以 e、 e、 f e 为基价的,所以这个位置是 b 一, 这个位置是 b 一,同样的道理,我们再得到 c 一,好,这个时候注意啊,我们就得到了什么啊, 机构在一位置的机构运动夹图,一位置的一位置,哪个位置就这个位置? a, b, c, e、 d 当然了,我们说这个 e、 f 是上面一条线,并不是 b、 c 这个位,这个位置线啊,画完了以后我们看看, 大家可以看到三个位置就能实现了, 也就说呢,按预定的连杆位置,或者叫缸有缸体导引问题,设计四杆机构的时候呢, 不论是求活动角链也好,还是求固定角链也好,都是把它转化成求固定角链。那么两 下面呢,我们在就是求固定角料的时候呢,我们对解的个数做一个分析,也就对他的求解条件 进行讨论。我们如果说弧度活动角的确定就是第一类问题,如果我们知道 b 一 c 一,呃, b 一 b 二 b 三 c 一 c 二 c 三,我们知道这角料的位置了,知道,而且知道他的具体的位置了,而且知道他的三个位置,这时候呢, 如果他求解,注意, n 等于三,我们说三不三个不在一条直线上减, 唯一,确定一个圆,这时候解是唯一的。如果活动角要确定 n 等于二的时候呢,这个时候呢,有无穷多解,有无穷多解的话,这个时候呢,你往往要考虑其他的因素来,再再确定这些解来。如果 n 等于四,注意, 如果 n 等于四,也就是说呢,如果我们知道一个构件,这是我们知道 b 一 b 二 b 三 b 四, b b 二 b 三 b 四,如果我们知道四个点啊,你再找他的圆心 a, 注意,这种情况是无解的, 也就是说四个点不见得在一个圆上,但是的话呢,如果说我们告诉你连杆的四个位置,也就是说我们四个位置,比如说这是 e f e, 这是 e 二 f 二,这是 e 三 f 三,这是 e 四,什么意思呢? 如果知道四个位置,这个时候你随便找你。如果,如果角料用 b l 吧,我就坐在这个位置来,这是一个 b 一,这是个 b 二,这是个 b 三, 这是个 b 四,注意啊,在这种情况下,我没法确定 b 一 b 二, b 三 b 四啊,一定在一个圆上,这是没法确定的,也就说这个时候也也就可以说啊,如果按高体的四个位置设计四个机构, 这么的分析来说,他是无解的。但是注意啊,我们输过随我们是说什么随便确定一个点作为活动脚链是无解的,但是呢,通过一定的方法,我们一定在这个 e e f e e 二 f 找到相应的点,哪个点?这个点是通 一定方式是能找到的,找到什么一定找到某某些点,对应的 f 一,这有个 b 一,这边另外一个 b 二, b 三, b 四,一定在一个元号一定能找到,而且能找到的这个解释无数个。所以说呢,如果 n 等于四,也就按四个构件的位置,也就按四个高体导演位置来设计四个机构的输入列,如果据活动角料不确定,那么呢,这个还是有可能有无穷多解的, n 等于五呢,道理是一样的,但是这个时候呀,解是少了,可能有解,也可能无解,也就是说对于求解问题,我们可以做一个总结,如果说活动角落确定,那么有三个位置可以确定,唯一的解有两个位置有无穷多解,如果 活动教练不确定,来,你来定这个活动教练,你来定这个活动教练的话呢,如果搞起导演位置有四个位置,这个时候还是有无从表解, 港体抖音有五个位置,这种可能有解,也可能无解,那么对于四个位置和五个位置设计起来是相当麻烦的,但是确实是能找到解的,那么我们真正的工程遇到的问题呢,往往往往是要把它简化成三个位置或两个位置, 这是设计的第一类问题啊,就是啊,连杆的预定位置设计四杆机构。 那么第二类问题呢,我们就是我们连杆机构设计的上一节讲讲的对应第一类问题,就是函数实现问题,也就是啊,连架杆的预定位置设计四杆机构, 具体来说呢,就是主动线转了多少度,对应的从动线转多少度,主动线再转另外一个位置,从动线又转另一个位置。是这样的问题, 我们看着啊,连价格的三个对应位置设计四个机构,所谓三个对应位置是什么意思呢?如果知道四个机构的机架长度, 而且又知道圆动键和从动键转动过程中,从某一个角度开始转圆动键转阿拉法一二,对应的从动键转 fi 一二,圆动键转阿拉法一三,对应的从动键转 fi 一三,他是指的指的这么过程, 也就是原动件从某一个七十角,我转到阿拉法一二角度,从动件转到 five 一二角度。然后呢,原动件还是从原来那个七十位置转到阿拉法一三角度,从动件转到 five 一三角度,这是这个问题啊,就 按两连价格的三个三对对应位置设计四个机构,那么这个问题怎么求解呢? 这问题啊,本身这个问题是有无穷多解的,所以有无穷多解,如果要得到微解,往往某些参数我是预先设定好的,怎么设定呢?我们可我们现在按照比例啊,先画出 ad 的长度来,然后干嘛 确定?先初步确定 b 的长度, a b 卵的长度就这么长,而且位置在此时此刻位置, 我们看到啊,他三个位置, a b 一, a b 二, b 三,我们刚才说了,他转阿拉法一二角度,走到 a b 二,转阿拉法一三角度 a b 三,走到这个位置来,这个时候我们就变成什么了啊?你看这个时候我们求解的时候,先确定了,先画出机架来,因为机架的长度告诉你了,而且确 确定了 ab 的初始位置 ab 的长度,这两个参数我们定好了,定好完了以后呀,这回我们就要什么,大家看到这个问题就变成什么问题了,求活动角链 c 的位置了,求活动角链 c 的位置了,求 c 的位置的话,那怎么办呢?现在 c 是个活动吊链,那怎么办呢?我们还是采用机构的倒置原理,把 c 活动吊链变成固定吊链,或者说把 dc 杆变成机架。 怎么变呢?我们我们可,我们,我们可以这想想啊,先把这个 a b 二, c 二 d 这个位置转动,转动什么位置转动? 把它转入到 e 位置负的 fateer, 我们说因为 从中间一个,现在注意啊,现在我们这个 c, 我们是没想象到 c 在 dc 格有一个位置,但是还没有确定,那怎么办呢?我们用反转法来确定。反转法怎么确定呢?确定着让 dc 为计价。 我们说 d c 的第二个位置到第一个位置是顺时针转了什么 c 一二角度,那么怎么办呢?那么我们的有 d c 二位置,有 d c 二就是逆时针转动 c 一二角度,那么呢,有二就转到了 c 二和 c 一重合了,这时候就注意啊,这时候 b 二就走到哪了, b 二两撇了。 同样的道理,我们再把 d 三的位置,本来 d 三是由 d c 一, d c 三是由 d c 一顺时针转动赛一三转过来的,那么怎么办呢?我们把 d c 三的位置逆时针转动 负的范一三,那么 c 三和 c 一也重合了,那么这个时候我们看 b 三转到哪来, b 三转到这个位置来。 好了,我们得到第三篇了,这个时候呢,我们就明白了啊,经过这个转化以后,我们就知道什么了, d c 是不动的了,也就是 d c 是什么?是固定 的构件,是计价了, c 点变成了固定角这了,那么 b 点呢?注意啊, b 点绕着 c 是做定轴转动的,现在 b 的有三个位置,哪三个位置啊?一开始的位置, b 一,在这个位置反转过程中, dc 二转到 dc 一,那么 b 二转到了 b 二两撇, 反转过程中, d c 三转成 d c 一,那么 d b 三转成 b 三两撇。这个时候注意啊, b 一比二两撇, b 三两撇是绕着 c 点做定轴转动的,那么怎么办呢?那么怎么确定 c 点呢?好了,那么这三个点在一个圆上,我们用求圆心的方法,也就是两两相连做垂直平分线。焦点, 大家看到注意这个标记, c 级,这个是 c e, 因为什么我们都是把它转到 c e 位置来,所以说呢,这是主义机构在 e 位置的机构。 c 点好了,那么我们看机构运动检图就是这样的,大家看到 好了,这是啊,两两 架考的三个对应位置,设计四杆机构。第三类问题,我们设计,我们按照形成苏比系数设计四杆机构,我们看一个曲柄摇杆机构 啊,给定的新生素,这个题目是这样给出来的,已知摇杆的长度,已知他的摆角,已知新生素比系数, 设计这一个曲柄摇杆机构,那么设计方法呢?首先说我们告诉了行程速比系数,那么怎么办呢?有行程速比系数,我们说 k 等于一百八十度加 c 塔除以个一百八十度减 c 塔,根据这个公式我可以求出来, c 塔等于一百八十度乘以个 k 加一分之 k 减一机位夹角找到了,那么怎么设计这四个机构呢?我们设定比例尺, 我们画画机构运这个设计的时候,首先说确定摇杆两个极限位置,也就是 d c 一 d c 二, 这个注意这个摇杆两个极限位置,注意,这个时候呢,注意啊,这时候曲柄和连杆呀,位于一个是拉直共线,一个重叠共线的位置,那么重叠共线位置,那么 而且呢九 c 二 a c 一, 这个角度等于极位夹角 c, 他,所以说呢,我们现在下边的任务,我们就是就是找一个点,找一个点一连和 a, 也就找一个点 a, a 和 c 二 c 一连,这个两个位置的夹角是极位夹角 c, 他,那么怎么确定这个点?我怎么随便点一个点和他聊 两个 c 和这两个点 c 一 c 一连加角是 c, 它呢?这个时候呢,我们应用的是什么啊?是同一个圆上的圆周角, 同一个圆上相同,悬长相同,弧长对应的圆柱角相等的原理来确定的。那具体怎么做的呢?我们可以说我们是这样做的,然后连接 c 一 c 二,然后呢过 c 二做 c 一 c 二的垂下 c 二 m, 然后呢过 c 一做一个角度角 c r c e m 等于九十度减 c, 它好了,这个焦点是 n, 这角点啊,角点是 p 啊,角点是 p, 那么这个角度是 c 它了。好了,那么我们以 p c 一为直径做圆。好了,我们知道了啊,那么角 c 二 p c 一,这个角度叫什么?叫这个圆上 c 一 c 二弦长或者 c 二弧长所对应的这个圆轴角圆的就有这个性质,就同样的弧长所对应的圆轴角长度,圆轴角大小都是相等的, 也就什么意思啊,任取一个点,我们看这个角度一定是机尾加角 c 它,机尾加角 c 它,那么这个时候注意, a c 二的长度等于什么?等于连杆的长度减去曲柄的长度。那么 a c 一的长度等于什么?等于连杆的长度加上曲柄的长度, 有什么意思呢?大家我们可以看一看的, a c 一等于 b 加 a a c 二等于 b 减 a, 这时候你可以求出什么来? a 的长度区别的长度等于二分之 a c 一加去 a c 二,而连杆长度 b 等于二分之 a c 一,加上 a c 二,也就是长度求,求出来了, 可以求出来来。从这里面我们可以看出,对于这个题来说,他有无穷多个解,因为什么我们只要在这上面随便取一个解压,都会得到这个几位夹角,这样解是无穷多的,也就是这本身这个问题啊,他是有无穷多解的, 大家看到啊,也就是 a c 二减去 a c 一的长度,减去 a c 二,也就是说呢,你在 a c, 你以 a 为圆心画一个圆弧, a c 二交到 a c 一上,交到这个一点,那么 e c 一就是二倍联 a 的长度, 大家看到这个设计出来了,这个设计出来了,也就是说什么?也就是说这个, 呃,按照形容,苏比系统设计四杆机构啊,这个题目是有无穷多解的,有无穷多事情应应该注意啊,这个行业啊,我们还拿着刚才这个题啊,我们以 c, 我们做 c e d 的延长线与这个圆, 与这个圆交到 g 点。做 c a d 的延长,交到 f 点。注意,这个 a 点是不能落在这个圆弧飞机的 f g 上的,不能落在这个略弧上,它只能是位于哪啊?位于 c 二 f 或者 c g 之间, c g 之间。而且呢,这个位置随着什么,随着 a 点要 f 的离近,它的最小传动角越来越小, 大家可以看到这个东西啊,大家看到这个位置啊,这个位置,如果在此时此刻这个位置,他的传动角等于噶马良撇最小传就等于这个位置,如果 a 往下挪,如果 a 往下挪,如果画到 a 撇这个位置了,大家再看这个传动角,这个传动角是这个绿色蓝色的嘎嘣亮片,这个位置大家看到啊,随着 a 向 f 点的靠近,而 f 点的靠近啊,它的最小传动角在逐渐减小,那么这种对机构的传递性能是不一样的。 好了,我再把再把把这个题这个求解条件说一下啊,那本身这个题啊,是有无穷多解的,但是注意,即使无穷多解,这个 a 点可以在 c 二 f 点上任意选取,但是注意 a 点千万不要落在 fg 上, fg 上这个机构没法实现运动, 他们他只能落在什么 c f 之内,那么随着 a 点靠近 f, 这个机构的传力性能变差,也就是他的最小传统角会变得小,以至于到了 f 以后啊,他的最小传统角会变, 加上零度。 好了,这个问题呢,我就给大家讲这么多,我们就学习这么多,这是一个曲柄摇杆机构,我们再一个看一个曲柄滑块机构, 确定滑块机构的实际上就是曲柄腰杆机构的演化形式。如果知道性能速比系数,知道冲程,知道偏距,设计这么个四杆机构,那么知道了,我们知道性能速比系数,我们刚才根据刚才的那个推导啊,我们可以求助他的机尾夹角塞下来 好了,那么怎么办呢?求出机会加角 c 台以后啊,我们设计的时候呢,先画出滑块两个极限位置, c 二 c 一,那么它的冲称是 h 是吧?那么我们知道 好,如果对一个圆,我们再做一个直角,再做一个等腰三角形,等腰三角形啊, 这两个角度是九十度减 c 的,那么以凹为圆形,我们画一个圆,我们画一个圆,我们画一个圆,我们知道了啊, c 一 c 二所对应的什么圆周角, 这所对应的圆心角是二, c 塔所对应的圆珠角就是 c 塔。那么这个时候呢,我在以什么 注意啊?我在做一个直下,与谁啊?与 c c 儿平行,它的距离,垂直距离是 e, 那么这个时候注意得到这个交点啊,这就是 a, 那么为什么是 a 呢?大家,我们看到这这,这就是固定角的 a 的位置,为什么呢?大家看,我们相连 a c 角, c c 二 ac 一,这个角度是极位夹角 c 塔,因为什么这个圆上 c 一 c 二所对弧长或者弦长对应的圆轴角是 c 塔,它对应的圆心角是二 c 塔,所以对应的圆轴角是 c 塔。这个时候呢,我就满足了一开始提出要求了,也就是极位夹角是 c 塔, 冲成是 h p m g 是 e, 所以说呢,这个为解是唯一的, 大家看看这个解是唯一的。 再看另外一个机构,摆动刀杆机构, 摆动档杆机构,如果 我告诉你机械的长度,告诉你形成速比系数,让你涉及这个四杆机构,这个问题相对相对来说比较简单的,我们看这是一个摆动导杆机构,大家看到这是一个摆动导杆机构,摆动导杆机构,大家看到摆动导杆机构,他的两个极限位置在哪个位置呢? 在于这个 ac 和 dc 重垂直的两个位置,垂直两个位置,那么垂直两个位置,这时候两个极限位置对应的即位夹角是谁呢?就是角 ca c 一,这是个极位夹角,这这这也就是什么 c a 的延长线, c a 的延长线与谁呀?与 a c e 的这个夹角,极位夹角,那么这个角度注意啊,因为这是个四边形,他的角度,他他的四个内角和等于二派,而这两个是垂直是派,所以说呢,角 c 二 a c 一加上个角 c 二 d c 一,这个角度是派,而这个角度,而这个极位夹角呢,又是他的补角,所以说我们得到实际上这个 five 角就是极位夹角 c, 他就极位夹角 c, 他, 那么这个范脚结尾夹角 c, 它的话,也就是说这个位置设计起来就非常好设计了,那么我们可以求出什么呢?因为知道 a d 的长度,我们就可以知道 a c 的这个长度了,它的长度等于什么啊?等于 l a d 乘一个赛引二分之范或者赛引二分之 c, 它 所以说呢,这个设计的相对比较简单,也就是什么,我这也就对于按导杆机构设计行程速比系按导杆机构以致他的行程速比系数设计导杆机构的数量。只要确定了机会夹角 c, 它我们就知道了曲柄的长度。这个问题呢,相对来说求解比较简单,你只要确定曲柄长度就可以了,那曲柄长度等于什么呢? a 就等于一个基加的长度乘以赛二分之 five, 这个 five 实际上就是几位加角 c。 好了,那么这一阶呢,我们学习了做图法设计四个机构, 那做图法的特点呢,就是简单直观,但是存在精度不高的问题。相对来说呢,解析法精度要高了,但是解析法的 求解要涉及到编程计算,那么下一节呢,我们学习解析法设计思考机构。
239七言 01:56查看AI文稿AI文稿
01:56查看AI文稿AI文稿一些难以区分的机械结构,曲柄摇杆、曲柄滑块、曲柄摇快,你还不知道, 记得点赞关注哦!
370少儿机器人编程虫子老师 00:41
00:41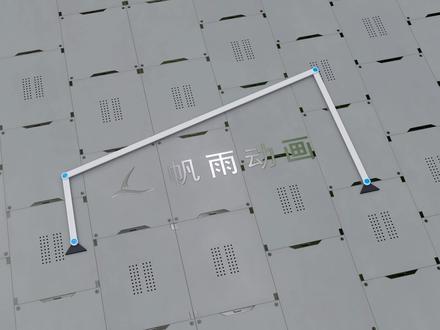 02:27查看AI文稿AI文稿
02:27查看AI文稿AI文稿这是一个平面式感机构,机械设计中最基础的机构之一。左边这根杆件可以做一个完整的圆周运动,它叫区别 右边这根杆尖只能在一定范围内来回摆动,它叫摇杆,中间这根杆尖叫连杆,这个视感机构属于区别摇杆机构。我们把连杆的一端延长,看看他末端的运动轨迹, 把延长的那一段旋转九十度,再看看他末端的一种轨迹,两条轨迹明显不一样, 为什么同一根杆尖上不同的点轨迹不一样呢?我们先来看一个钢铁上个点的运动轨迹, 他向右边平动,他的自信的轨迹是一条直线段,由于钢体上个点的相对位置是不变的,那么钢体平动时,个点的轨迹保持平行。我们再来看转动的情况,钢铁上个点的轨迹是一系列的同心圆, 我们再来看像汽车那样拐弯的情况,各点的轨迹大致上都比较相似的,但是如果情况更复杂一些,就不是这样了。 让我们在连杆上固定一个平面,这个平面会跟随连杆一起运动。 在平面上选取一些点,我们来看他们的运动轨迹, 可以看见他们的轨迹都不一样。同一个机构通过选取不同的点就能画出不同的轨迹, 我们还可以通过调整杆的长度来调整轨迹的形状。
8269帆雨动画 10:02查看AI文稿AI文稿
10:02查看AI文稿AI文稿接下来我们分享的是平面四杆机构的基本形式, 平面视感机构呢,它是由一机架门槛 固定不动的,这个叫做机架。第二,廉价感 跟鸡架相连的这两个杆叫做廉价杆, 连杆是指与机架不相连的这个杆叫做连杆。 在我们廉价感他的一个运动形式不同,他的名这个名称也不同,我们看能够做整周转动的 啊,像我们左边这个一样,他能够做整周转动的这种廉价感叫做曲柄。 第二种,像我们右边的这个廉价感,他只能做往复摆动的,只能做往复摆动的这种叫做摇杆 连杆,我们看这个连杆他只能在平面上进行一个运动,根据 廉价感的一个运动形式不同,注意是根据廉价感的运动形式不同,可以分为三种,第一种,曲柄摇杆机构 啊,从这个名称当中我们就可以看得出来,他廉价感一个是曲柄,另外一个是摇杆。第二种,双曲柄机构, 指的是他的两个廉价感都能够做整周的转动,所以他可以叫双曲并机构。第三种,他的廉价感 都只能做这种往复的摆动,所以这种机构他称为双摇杆机构。 我们看一下第一种曲柄摇杆机构,我们看在我们这个动图上面显示的是一个破碎机的一个示意图, 左边的这个廉价杆做整周的回转运动,所以他是曲柄。右边的这个廉价杆他只能做往复的摆动,所以他是摇杆,所以这个机构我们就叫做曲柄摇杆。 我们再看这个图,里面是一个缝纫机踏板,通过人力将这 缝纫机踏板左右摇摆,从而带动我们的这个曲柄啊,这个曲轴来做回转运动。缝纫机踏板实际上他就是以摇杆为 主动力,从而带动一个曲柄啊,以摇杆的上下摆动来带动这个曲柄的整周转动。所以缝纫机踏板他是曲柄摇杆机构 啊。我们看跑步器, 跑步器这边是一个曲柄,而上面是一个摇杆,所以跑步器 他也是属于曲柄摇杆结构。 我们再一起来看一下双曲柄即可。 脚链四杆机构当中,两个廉价杆均为曲柄时,称为双曲柄机构。 双曲柄机构是指在脚链四杆机构中,两连架杆均为曲柄的四连杆机构。双曲柄机构中常见的还有平行四边形机构和反平行四边形机构。 其中平行四边形机构是两个曲柄长度相等,且连杆和机架的长度也相等成平行四边形。两曲柄的转动速度和方向相同的机构,其在机器中的应用较为广泛,如机车车轮机构,其内含有一个需约束,以防止 在曲柄与机架贡献时运动不确定。反平行四边形机构是两曲柄长度相同,连杆与机架的长度也相同,但不平行的机构 是这两个杆他都能够做整周的回转。我们看最典型的是惯性筛,他也是双曲柄机构, 他的这个左边的廉价感和右边的廉价感都能够做整周的转动,所以这种机构我们称为双曲柄机构。 我们看叉床,这个里面也有一个双驱 并结构。 在双曲柄机构当中,若相对的杆,这个两杆的长度分别相等时,这种叫做平行双曲柄机构。 像我们的这个机车车轮的联动机构就是双曲柄。还有一个 我们的天平机构,它是属于双曲笔。 我们看实际上天平机构他如果能够做这个整周的回转运动, 说明他是一个双曲柄机构。 我们再看车门的起臂机构,它实际上是一个反向的双曲柄机构。 引体向上这个训练器, 我们一起来看一下。 再看若脚链四杆机构的两个连杆,这个连架杆均为摇杆,则称为双摇杆机构。也就是说这两个连架杆 只能做往复的摆动,这种机构称为双摇杆机构 啊。我们看这个破碎机啊,这个起重机,他就是我们的双摇杆机构。 港口的一个起重机,他就是我们的一个双摇杆机构。 我们再看飞机起落架,他也是属于 双摇杆机构啊,飞机起落架属于双摇杆机构,剪板机 属于双摇杆机构。 通过分析可以得出脚链四杆机构曲柄存在的一个条件,他是两个条件,第一个是感长条件。什么是感长条件呢?叫最短感 与最长感的长度之和一定要小于等于其余两感之和, 这是赶场条件。第二个条件是廉价感,或者是鸡价当中必有一感为最短感。 这样两个条件都满足了,说明我们这个机构当中存在区别。 我们判断这个脚裂四杆机构是何种机构的一个方法, 先判断是否满足感叹条件,如果不满足,则是双摇杆机构。第二步,如果满足感叹条件,要看核感为机架,如果是最档杆为机架,则机构是双曲柄。 如果最短感的灵感为机架,则这个机构就是曲柄摇杆机构, 若最短感的对感为机架,这这个机构是双摇杆机构。好,我们今天的课就讲到这里。
606無極斌418 06:58
06:58 04:16
04:16 09:13查看AI文稿AI文稿
09:13查看AI文稿AI文稿同学们好,这节呢,我们学习平面四个二机构的基本性质之三,也就是传力性能。 我们先看两个基本概念,压力角与穿动角,这是一个 区别。摇杆机构,如果 ab 构件为原动件,他通过 bc 杆推动 cd 运动,那么这个时候呢,如果忽略 这个机构的惯性力、摩擦力和重力,我们看 bc 杆就是一个二力杆,因为他仅有两端受力,那么而且他的力呢,是沿着什么 bc 杆的方向,那么呢也就说呢,也就 bc 杆对 cd 杆的作用力是沿着 bc 的方向指向右上方的,那么这时候呢, dc 杆上 c 点的速度呢,是垂直于 cd 向右的, 那么这个角度我们把它叫做压力角阿拉法,也就是什么意思呢?我们可以简单说一下啊,后边我们在拖轮机构,我们还会遇到这个压力角,什么是压力角呢?我们可以说力 的作用线与力的作用点的速度方向所加的这个蕊角,也就这阿拉法,我们把叫做压力角,那么压力角的雨角, 我们把它叫做传动角,为什么就有压力角这传动角这个概念呢?我们我们可以看看这个水这个力啊, f 这个力啊,真正的 bc 杆推动 cd 是推动, bc 杆推动 cd 是转动的,我们把这个 f 这个力啊,可以分成两个方向的力, 一个是水平这里,一个是垂直于 c 的地理,叫 ft, 一个是压着 dc 方向的,叫 fn, 这里面真正推的 cd 转动的是 ft, 也就是这个切相力,而他的这个法效力的 fn 呢,他不仅没法推动 cd 和转动, 带来不好的作用,什么不好的作用啊?来就是他增大了 c 转动符和 d 转动符之间的镜像力,这个镜像力里增加呀,使得他的正压力增加,如果有摩擦这里面呢,摩擦阻力会增加,所以说这个 fn 过大,对于传动是不利的。所以说嘞, 我们设计这个机械的时候呢,我们会希,我们是希望这个 ft 越大越好, fn 越小越好。那我们再看压力角,传动角和 ft 和 fn 这有什么关系呢? 大家可以看啊,随着传动角的增加,蛤蟆的增加,或者随着压力角的下降,什么这个有效分力,也就对传统有效的力蛤蟆大, ft 大, 那么呢,相应的产生的这个什么,产生的这个正压力就小,也就是这个实际上是有害的,力越小是产生正压力的力越小,所以说呢,我们可以说压力小越大,这个几乎产生的有效分力小, 在转动服中产生的症压力大,那么传统较大,就意味着产生的真正传递运动的这个力要大, 产生也就对传统有有用的这个力大。所以说呢,我们设计一个机械,我们就希望他的压力角越小越好,他的传动角越大越好, 也就是传动角越大,对机构的传力是有利的。所以说呢,我们一般用传动角来衡量机构的传力性能, 但是注意,在使用过程中,我们看此时此刻这个位置啊,这个位置在这个传动角啊,这胳膊就等于角 bcd。 注意,在此时此刻这个位置啊,也就是如果角 bcd 是蕊角的时候, 那么这个角度就等于这个传动角,但是注意,因为在这个机械在运动整个转动过程中啊,我们观察这个角 bcd, 这个三角形,这个因为 ab 在转动,所以 bc 的长度总在变化, 所以这个角度也在变化,也就是呢,对于四四杆机构来说呢,他的传动角啊,始终是在变化的。 那么嘞,那么我没没法说什么时候大,什么时候他大呀?还小。那么一般情况我对这个他整个一个熏端过程中呢,总有一个最小传动角,我们希望这个最小传动角, 所以涉及过程中要满足一个要求,也就是你看一般情况下这个最小穿透角度要大于四十度到五十度 好了,也就是为了保证机械的传率性能,最好应该使他的最小传动角要大于某一个值。那么最小传动角怎么确定呢? 咱们还拿这个曲柄腰杆系过来说最小传动角,我们刚才说了这个最小传动角,注意啊,角 bcd 如果是蕊角,这个就是什么,他本身就是传动角。如果角 bcd 是动角的, 我们说因为压力角的鱼角是传统角,传统上一定小于九十度,如果这饺子是钝角了,那么 他的补脚就是传动脚,也就一百八十度减去的,干嘛是传动脚?这样的话呢,我们如何判断 ab 转一周这一个运动循环里面啊,这个传动脚什么时候他最小传动脚是多少呢?这样的话呢, 我们要算两个位置,算哪两个位置啊?一个是蛤蟆最小的位置,一个是蛤蟆最大的位置。蛤蟆最大的时候呢,如果他小于九十度,那么最小传动角呢?就是那个 最小的那个蛤蟆位置,如果他大于九十度,那么我们往一百八十度假去,他得到一个传统角,他在和那个小于九十度的那个最小传统角来比较,这两个角度哪个最小, 哪个是最小传动角,所以说呢,也就是这嘎达什么是最传动角?什么是最小呢?位于两个位置,哪两个位置啊?也就是最小这个角度最小的时候,也就是 b d 最短的时候。 b d 什么时候最短呢?也就是 b 位于 a d 之间的时候, 也就是 a d 杆和 a d 杆处于重叠贡献的位置,这时候胳膊是最小的,那么还有一个位置有可能是最小穿的角,也就是胳膊最大,而且大于九十度的时候来。那么什么时候胳膊最大呢?也就是 bd 最潮的时候。 bd 什么是最潮啊?也就是 b 位于 ad 的延长线上,或者 abad 杆处于什么?处于拉直共向的位置。 好了,你注意这两个位置,大家注意这两个位置啊,大家我们看到最小的位置,蛤蟆两撇是吧?也就是叫 b 两撇, c 两撇低,这是什么啊? b 两撇位于什么 ad 之间的,如果 b 位于 dna 延长线上,这个就得到一个蛤蟆 这个胳膊。对于这个图来说啊,对于这个图来说,他在九十度附近,是吧?或者小于九十度,那么呢, 他的传统角呢?在九十度左右,是吧?他不是最小传统角,对,是这个最小传统,但是注意啊,并不是所有的,有的时候这个角非常大,接近一百八十度了,那么一百八十度剪他呢?这个传统角非常小,那么这叫 两个比九就得到了,也就是什么意思呢?刚才根据我刚才的论论述啊,就是说机构的最小传动角出现在两个位置之一,哪两个位置之一啊,就出现在主动曲柄与居下的贡献的两个位置之一。 那么我们分别算这两个蛤蟆角,如果算出来有一个是大于九十度的,那就你让一百八十度减去这个九十度,得到一个角,再和另外一个角度比,谁是最小的,谁是 这个就是最小传统球。如果说这两个都小于九十度,那这两个哪个最小,哪个就是最小传统球。也就说嘞,那么我们这这这胳胳膊撇和胳膊两撇怎么求呢?我们用简单的来处理啊, 就鱼轩定理就可以求出来了。那么具体怎么求呢?这是简单的,这是高中数学,总是知道这些东西怎么求?知道三 边长,这三个边长求某一个角度,这非常好求的。 好了,这节呢,我们学习了四个机构传动角的概念和计算,那么传动角是衡量机构传力 性能的重要参数,压力角越大,或者说传动角越小,机构的动力传递性能越差, 那么压力角在后边。我们学习齿轮机构、凸轮机构都会遇到这一个概念,大家要把压力角的概念要系死。什么是压力角呢?我们可以简单一句话,就是力的方向, 举例子,做一点的速度方向所加的锐角就叫压力角。这节呢我们就缺席这些内容。
142七言 00:54
00:54 17:22查看AI文稿AI文稿
17:22查看AI文稿AI文稿同学们好,上一节呢,我们学习了平面四杆机构的类型、演化形式及它的应用, 这一脚呢,我们学习平面四杆机构的特性,那么上次课呢,我们介绍了脚链四杆机构,有三种类型,一类叫双曲柄机构,一类叫双摇杆机构,一类叫曲柄摇杆机构。那么什么时候机构有曲柄呢?什么时候没有曲柄呢? 对角,我们学习角链四杆机构有曲柄的条件,那么如果是曲柄,那么这个廉价杆与机架形成的转动符一定是周转符。我们首先看看什么满足,什么条件,周转符存在, 如果这是一个角链四杆机构,它的长度 a、 b 杆长度等于 a, b、 c 杆长度是 b, c、 d 杆长度是 c, a、 d 杆长度是 d。 如果要使转动符成为周转符,这个时候我们假如 a 小于 d, 也就是 a、 b 杆的长度小于 a, d 杆的长度 a 满足。什么叫成为周转幅呢?那么我要没 a, 能不能成为周转幅决定于谁呀?还决定于 bc 杆。我们想想,没有 bc 杆,没有 cd 杆这个连接,那么 a 只是也就 ab 杆,只是通过转动幅 a 和机架销量, 他肯定能整出转动的,因为你这个机构里面啊,你增加了 bc 杆,你增加了 cd 杆,这个时候呢, bd 的长度,也就是 bcd 一定要成为一个三角形,也就 bd 的长度不能任意变化了, 也就说的那么 b、 d 长度不能任意变化。我们如果假如说 a、 b 杆能够整周转动,那么这回我们观察这个 b、 d 的长度, b、 d 什么时候最长,什么时候最短这个时候呢?最长的时候 b、 c、 d 要是一个三角形,最短的时候呢? b、 c、 d 也要是一个三角形,我们从这个思路来出发来证明满足什么条件? a 构件是转动符,注意啊,前提条件我们是假设这个 a 的长度也就 ab 的长度小于 ad 的长度。好了,我们观观察,观察 啊,也就说了能够周周转福,能够成为周转福的话,那么 a、 b 点必须能整周转动,那么他最短的时候呢?是在哪呢?是在 b 点,位于 a、 d 贡献的位置, 但是 b 位于 a、 d 之间,那么 b、 d 什么时候最潮呢?也就 b 位于 d a 的延长线上,或者说如果能够整轴转动, a、 b 杆 必须通过 a、 b 杆与 a、 d 线两次贡献的位置,一次是重叠贡献,一次是拉伸贡献, 也就要有要有这三个位置,也就也也就这个。这大家看到这个 a、 b 撇 c 撇 d, 是吧?这个时候呢,注意 a、 b 个赛什么和 a、 d 是拉直贡献的,那么还有一个位置就是 a、 b 两撇 c 两撇 d 是吧? c 两撇 d, 那么呢,这个处于什么重叠贡献的位置,也就 ab 杆和 ad 杆。那么我们观察这个三角形啊,观察 a, 当然观察 d, b 撇 c 撇,观察这个三角形,这个三角形的话呢,要满足这个三角形的条件必须是 a 加 d, 也就是 b 撇 d 的长度。那么因为这个 b 处于 da 的延长线上, ab 两撇长度是 aad 的长度是 d, 所以 a 加 d 要小于等于 b 加 c。 那么我们再观察这个三角形,哪个三角形呢? b 两撇 c 两撇 d, 观察这个小三角形,三角形呢?那么呢,这个时候注意 b 两撇 d 的长度是什么啊?是 d 减去 a, 注意啊,因为 a 小于 d, d 减去 a 是个正值,是吧?那么 这个数呢?也就说呢,我们看这个三角形,哪个三角形,也就这个 b, 也就是 dc 撇的这个长度是 b 的长度,它小于另外两边长度和,也就小于等于 d 减 a, 也就是 b 两撇 d 和 c 小于这个, 那么这个列主演我,我们把这个简化一下,把 a 挪到左侧来,就得到什么 a 加 b 小于等于 c 加 d, 那么我们还是还是观察这个小三角星, b 两撇 c 两撇 d, 这个时候我们看到 c, 这个长度,也就这个三角形啊,还要小于等于成败,这个两个 另外的两边长度和也就三,第三边要小于另外两边长度和,也就 c 要小等于 d 减 a 也是 b 两边 d 加上个 b, 那么这会我再整理,把 a 挪走左侧来,就得到了什么?就得到了 a 加 加 c 小于 a 加 c 小于等于 c 加 d, 那么这也就是满足这三个条件, 那么呢, a 就能成为周转福,那么对这三种条件啊, 我们两两相加,我们把 a 加 d 小于等于 b 加 c 和 a 加 b 小于等于 c 加 cc 加 d, 我们相加相加。我们我们观察这个,我们会得到什么?会得到这个东西啊,也就是两两相加,第一个式子和第二式相加,会得到 a 小于等于 b, 那么第一个式子和第三个式子相加,我们会得到 a 小于等于 d, 第二个式子和第三个式子相加,我们会得到 a 小于等于。也就是说上面这个三个式子两两相加,你削去相同的项,会分别得到 a 小于等 b, a 小于等于 c, a 小于等于 d, 说明什么?这句话最终就是什么? a, b 杆或者 a 要是最短杆,也就是周转负的一个条件啊,也就是 a 成为周转负,第一个条件就是什么? a、 b 杆必须是最短杆。 好了,这是一个最短杆,那么这是一个最短杆条件。另外还有一个,这三个式子要满足,我们可以用一句话来说,实际上这三个式子可以用一句话说出来,哪个话呢?既然 a 是最短杆了,那么最短杆加上另外这三个杆长度里面最长的那个杆, 如果小于另外两杆长度和,比如说啊,比如说 c 是最长杆,那么 a 加 c 要小于等于 b 加 d, 如果满足了这个式子,这两个式子就自然就满足了,因为 c 是最长格,你满足这个式子啊,那么这个式子呢,这边是加的是短的,这边加的长的,所以他更满足小于等于条件了。所以说呢,周转符的条件,我们可以这么判断, 要使转动符成为周转符,满足两个条件,哪两个条件呢?第一个条件就是最短杆的长度加最长杆的长度小于等于,或者叫不大于另外两杆长度之和。 而且呢,注意啊,因为 a 是转动符是吧? a 是转动符, a, b 杆是最短杆, 那么呢,我们刚才的注意,我们刚才假写的条件是什么条件呢?是假写这个 a、 b 杆的长度小于等于 a, d 也就小于是小写 d 的长度。如果说 a 的长度要大于 d 的长度, 我们同样能得到这个结论,方法和和上面的推理方法、推等方法是一样的。那么这样的话呢,我们就得到一个结论,什么结论呢?不管是 a 是最短杆, ab 是最短杆也好,还是 ad 是最短杆也好, 那么这个 a 要一定要是周转符的话,那么什么也就是说和 a 相连和转动符 a 也就大型转动非相连的两个勾点,肯定有一个是最短格, 这就是说我们转动服成为周转服的第二个条件,就是组成该周转服的两杆中必有一杆为最短杆。 好了,那么也就是轴转符存在的条件,根据两个条件来判断,第一个条件就是最短杆加最杆加最长杆长度和不大于或者小于等于另外两杆长度和,那么 和这个转动符连接了,其中一个构件必须是最短杆,那么第一个条件我们把它叫做杆床条件。 好了,我们已经说明了啊,周转不存在的条件了,那么角落四个机构有缺点怎么判断呢? 好了,我们说首先要判断这里面有没有周转符,如果个杆的长度满足杆长条件,也就是最短杆加 最长杆不大于或者小于另外两杆长度和如果基架或者廉价杆为最短杆,这里面一定有区别。 好了,那么我们对一个具体机构进行判断了啊,我们看看如果马足杆超条件,大家看到这个也就 说最长杆加最短杆,也就是 a b 杆,这里面 b c 杆是最最长杆,小于等于 a d 加 d c 是吧?如果这个时候呢,最短杆是最短杆是廉价杆,我们看到我们将得到一个什么, 大家看到这是一个曲柄摇杆机构, 如果这个机构注意同样的这个机构啊,最短杆还是廉价杆是吧?这是以 b、 c 杆为基价的得到了机构咧, 仍然是曲柄摇杆机构是吧?为什么这么说呢?大家看到啊,我们看到这个里面,我们刚才已经证明了 a 是个转动符,那么 b 类也是个转动符, 为什么?因为马足改装条件和 b 连接的这个 a、 b 杆是最短杆,所以说呢,它也是个转动幅,周转周转幅。 如果我们哎以 a、 b 杆为基价,大家先分析一下啊,满足杆床条件是吧?和 a 相连的有个 a、 b 杆是最短杆, a 一定是个周转幅,是不是啊?那么注意啊, b, 我们再看 b 转动幅,是周转幅吗? 因为和 b 相连,在这个 a、 b 轮,它也是一个什么最短杆,所以说它仍然是个周转符。这要是 a、 b 都是周转符,我们得到了这个机构,它肯定是双曲丙机构。 那么再看,我们再看,以 c、 d 格儿为计价,那么以 c、 d 格儿计价,我们 看着啊,与 d 相连的最短杆, a、 b 不在,这也就是与 d 相连的没有最短杆,与 c 相连的也没有最短杆。所以说呢,这两个 a、 d 杆、 b、 c 杆都不是曲柄,最终这是一个什么双摇杆机构? 好了,我们在在刚才的这个 etc 上说一下啊,就是满足杆长条件, 周转幅。怎么判断呢?如果满足杆长条件,那么最短杆两边的转动幅就是周转幅, 另外两个转动符嘞,就是摆动符。注意,我们这要要瞧那个现在也就最短杆两边的 转动符码,从杆长条件情况下,他是转,他是什么周转幅?这个时候呢,如果以最短杆为计价,我们会得到一个 双曲柄机构,因为他两边是转动的,都轴转。如果你最装的为廉价杆,那么他得到的是曲柄摇杆机构。 如果以最短杆的对边为基价,那么最短杆成连杆了,这个时候呢,他只能是双腰杆机构,因为对边这两个转动符,他是不是周转符,他是摆动符。 但是大家应该明白这个啊,即使以最短杆的对边为基价,得到的是双摇杆机构,这个时候大家应该明白,也就是最短杆两边的转动符仍然是周转符,也就是什么意思呢?也就大家看到这个勾,这相对于这两个勾,这你看大家看到还是做整个转动的, 只不过因为他不是廉,因为他不是廉价格的没法,我们把它称作器柄着,我们可以看到这个。 好了,我们再把刚才结论里给大家重复一遍,如果角这四个机构里各个长度满足杆长条件。 所谓杆上条件指的是什么?是这个机构的最短杆加最长杆小于等于另外两杆长度和。如果最短杆为廉价杆,得到的是曲柄腰杆机构。如果最短杆为机架,得到的是双曲柄机构。如果最短杆 这相对杆或者对边杆为机架,或者是最短杆为连杆似的,得到的是双摇杆机构。 如果个杆长条件不满足杆长条件,这个机构没有周转幅,无论以谁为低价,得到的都是双摇杆机构。好了,我们看一个例子, 曲柄滑块机构。什么是存在曲柄?大家看到这是一个偏执的曲柄滑块机构, 那么这个时候我们看到啊, c 是个滑块,这个滑块我们可以它,我们可以把它想象为它是一个什么啊?回转半径无限大,或者是基廉价杆无限长的,也就是 c、 d 杆是无限长的一个构件。好了,这个时候呢, 我们要判断谁是最短杆,首先说他满足不满足杆上头的,我们得判断这个,那么谁是最短杆,谁是最长杆的? 我们看到我们看这个东西啊,这里面也就是说了 d 在无穷远处,那么 a、 d 是无是最长杆呢?还是 c、 d 是最长杆呢? 我们给大家做一个简单例子,也就是说什么在 这是 a 点,这是 c 点,那么 d 点呢?在无穷远处,这是 d 点,也就是说呢,我们想让它在无穷远处,我们连接这是一个杆,这是一个杆, 那么 a、 d 是最长的呢? c、 d 是最长的呢?我们可以这样考虑啊,我们过 a 点啊,做这个 c、 d 的吹向做做做这个位置, 大家看到这是一个直角三角形,这是一个直角三角形,由于地在无穷远处,如果我们把这个叫 c 撇的话啊,如果在地在无穷远处 的话,那么 a、 d 和 c 撇 d 的长度是相等的,所以说呢, c、 d 比 c 撇两撇 d 要长一个长度,长在哪个长度啊?就是我们说是刚才这个偏距, e 就是这个偏距一,所以说呢,这个机构里面呢,说 a、 d 最长, c、 d 最长,哎,当然 c、 d 是最长的了, 好了,也就是这里面 c、 d 是最长的,那么最短杆加最长杆,我们可以到也就是 a、 b 加上一个 c、 d 无穷大,这是无穷大啊,要小于等于 b, c 加 a、 d 无穷大,小于等于这个, 这里面是什么意思啊?这里面为什么这么说啊?我们前面说了啊, a、 b 如果是曲丙的话,那么和 它相连的构件 a、 b 杆肯定是最短杆,所以说我们一开始就认为 a、 b 肯定是最短杆,肯定是最短杆,因为 a、 d 是无限长的杆,是吧?后来也就最短杆加上最长杆。 c、 d 无穷大,一定要小于等于 b, c 加 a、 d 无穷大。 好了,这个时候呢,注意啊,我们说了, c、 d 无穷大等于什么啊? c、 d 无穷大,等一个 a、 d 无穷卷加上这个 e 的长度,然后呢,我们把这 a、 d 无穷大消去,就是 a、 b 加上 e 小于等于 b、 c, 这就是偏置曲柄滑块机构。曲柄存在的条件就是曲柄的长度加上偏距 e 要小于等于连杆 b、 c 的长度 如果是个对新的一等于零,那非常简单, 那就是谁啊? a、 b 的长度小于等于 b、 c 长度就行就可以了。好了,也就是说呢,这是偏置曲柄花块机构存在的条件。 那么这一节呢,我们学习了脚链四杆机构曲柄存在的条件,那么脚链四杆机构呢,分为双曲柄机构、双腰杆机构和曲柄摇杆机构。这一节呢,我们学习了 四个儿机构基本类型的判别方法。
79七言 01:56查看AI文稿AI文稿
01:56查看AI文稿AI文稿平面四杆机构是机械设计中最简单的机构之一。一七八四年,也就是乾隆四十九年,工程师詹姆斯瓦特设计了一个非常巧妙的四连杆机构,并用在他的蒸汽机上,在工业革命中发挥了巨大的作用。 这个机构就是瓦特连杆,也被称为平行连杆,两边白色的杆一样长,蓝色连杆比白色连杆要短。他的终点轨迹很像一个数字八, 这个八字形轨迹上面有两段是近似的直线段。至于他的用途,瓦特在给他的合作伙伴中的信众提到,我发现了一种是 活塞杆上下垂直运动的办法,不需要链条或者捣鬼,这是我最巧妙的发明之一。 而在给他儿子的信中,瓦特解释了他是怎么发现这个机构的。这是瓦特手绘的图。 ab 和 cd 是两根等长的杆,可以分别绕 b 点和 c 点旋转,用一根杆将 ad 连接起来,那么在一定的弧段内, ad 终点 e 的轨迹。近视为直线娃特连感并不是一个完美的设计,因为他只是一个近视的直线机构。 但相比于精确直线机构,它具有结构简单的优点,因此至今仍应用在一些车辆的悬架上。它能保证车轮轴相 对于车身只做垂直的运动,而不会发生侧向的运动,对车辆的性能非常的重要。
524帆雨动画 04:52
04:52






