f450无人机基本结构图手绘

粉丝640获赞1719
相关视频
 11:32查看AI文稿AI文稿
11:32查看AI文稿AI文稿今天组装一架 f 四五零四选一无人机, 这是他的机架部分击臂上板和下板。 首先在下板的正后极处镀上焊吸, 进行电机和电条的安装。电机选择 gt 二二幺二九八零 kv 的无刷电机,顺转逆转各两个。 用螺丝将电机固定在机壁上, 电机线头一定要朝着机臂方向,注意白色、红色机臂各一个,顺时针和逆时针。电机 电条选择的是好赢的三十万电条。 将电条固定在机壁上,用扎带绑好, 剪掉电条,电源线多余部分,波线长度两毫米左右。 将电源线接口处镀上焊吸, 将电条焊接至机身下板,注意红色接正极,黑色接负极。 将机臂固定在机身下半处, 同理完成其余电条击毙和下板的安装。 将多功能模块的电源接口焊接至电源的下板上,红线、黑线分别与正负极相对应。用 双面胶将电源模块固定。 将多功能管理模块信号线连接到主控器的叉三接口。从右上开始,沿逆时针方向将连接电机的四个电条分别连接到主控器的 m 一、 m 二、 m 三、 m 四接口。 然后将带有叉 t 六零空投的电源线焊接到电源板的正负极, 连接电机与电条,这里不用在意接触顺序,随意接入。 将接收机用线接到主控器的插二接口,打开遥控器,按住接收机的对频键,同时接通电源。接收机上绿灯常亮,完成对频。 然后将主控器固定在下板上,并使其与飞行器机身保持平行。 安装上板并固定 gps, gps 上箭头指向与机头方向一致。 gps 接到主控 exp 接口,将主控上的 aetru 接口分别与接收机上的一、二、三、四、五通道相连。 led 信号灯接到主控的 led 接口, ps 接到主控 exp 接口。打开遥控器,接通电源, 通过 led 上的 usb 接口使无人机与电脑相连。打开调餐软件, 先确定飞行器类型,设置 gps 位置参数, 选择接收机类型,对摇杆进行较准。 在遥控器上选择一个三位开关 作为控制模式,切换开关, 对电机施工保护和电压进行设置, 完成调餐。 整理多余的线, 用扎带 将接收机和信号灯固定, 测试电机转动方向, m 一、 m 三电机逆时针转, m 二 m 四电机顺时针转。若电机转动方向相反,需要换电机与电条任意两个插头的接触顺序, 确保转动方向无误后,用扎带将电机电条线固定,在机壁上 装上螺旋桨, 用扎带固定电池,调整电池位置,微调重心,准备户外试飞。 在户外选择空旷场地,打开遥控器,接通电源。 gps 收形完毕后,解锁启动电机, 无人机能平稳起飞,前后左右移动,安全降落。
1674浮生过半丶半称心 01:27490修无人机的雷主任
01:27490修无人机的雷主任 00:08查看AI文稿AI文稿
00:08查看AI文稿AI文稿这是四种飞行器设计文件,为通用三维格式 stp, 需要这个模型文件的可在评论区告知我们。
238机械狗社区 01:50查看AI文稿AI文稿
01:50查看AI文稿AI文稿朋友们大家好,这里是还不错创客商城,今天我们给大家说一下这个自己如何做一个。嗯,无人机其实比较简单就是,嗯,成本有点高啊。就是首先是这个遥控, 嗯,这个遥控可能都要五六百,这个遥控器带接收器,然后这个东西是开源的, 嗯,全世界都在卖机架,都是通用的。 f 四五零,这是机架,嗯,机架上面有这个,然后这个是电条,这个是电条,电条是需要焊在上面有四个电条, 四个电条,呃,控制四个马达,马达扇叶,然后把电条接在这个上面,都有一个 线接待这个飞控,这个是飞控,这个是接收器,下面是电池,这是 gps, 就是这个遥控器发射信号发射给这个接收器,接收器发射信号给这个飞控。飞控,嗯,控制着四个电条, 然后飞控上面又接了一个 gps, 呃,定位使用,下面是电池, 其他这些这都是辅助的,可用可不用。哎,我们看到这个遥控器啊,这么多按钮,看着好吓人。其实 对于初级来讲呢,不需要管那么多,就是油门,油门,嗯嗯,左右歪,前后歪开关就行了,嗯,比较简单,当然,嗯,其实 它的功能还是特别多,还有很多各种各样的智能的功能,这个需要慢慢开发,慢慢实现,一步一步来。
368小钉锤创客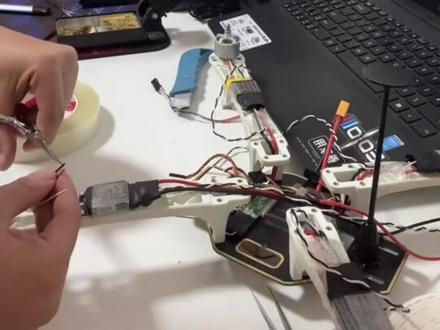 14:55
14:55















猜你喜欢
- 2906-R-