codesys最新版本是多少

粉丝424获赞771
相关视频
 05:05查看AI文稿AI文稿
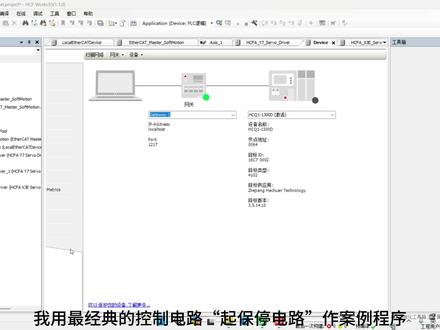
05:05查看AI文稿AI文稿哈喽,大家好,我是小智同学,今天给大家介绍无实物仿真案例程序,我用最经典的控制电路七宝亭电路做案例程序, 我已经提前用大家熟悉的三菱软件编写了一个奇宝亭电路程序,我们一起来看一下。这边我们可以看到 x 零十作为启动按钮, x 一作为停止按钮, y 零作为输出信号,同时 y 零自锁,达到保持的效果,这样三菱的七宝亭电路就编写完成了。接下来我们来用卡的四四软件编写七宝亭电路程序, cuts 软件支持结构化文本 st 语言,同时也支持梯形图 l d 语言。我们先添加一个程序,在左侧导航栏中右击 apple case, 选择添加对象,在右侧栏中选择噗,给新增 的铺一个名称,在下面选择程序弹窗的最下面选择程序语言。我们在这边可以选择梯形图还是结构画文本,我选择梯形图来编写这个程序,点击添加即可,这样子我们程序就添加过来了。 不过卡特斯斯 t 型图功能不像三菱 plc 那么齐全,像三菱常开触点可以用快捷键 ld and 表示,长臂可以用快捷键 ld oni 表示。在卡特斯斯中这些快捷指令都是没法运用的,下面我来演示如何用卡特斯斯编写程序。 我们在软件上方工具栏看到有常开触点,常闭触点插入串联右触点插入线圈置为线圈复位线圈,这边是插入空功能快,可以调用轴控功能快的 这边插入功能快,我后期视频会进行讲解。然后我们还可以在右侧的工具箱中选择。我们在梯形图元素中也看到有常开触点等功能,我们来编写程序。 七宝停电路的启动按钮是常开触点,我们给触点命名为启动名称,命名完成之后直接 enter 在自动声明弹窗中我们可以设定该变量的使用范围,这边我不修改,还可以修改变量的类型,比如设为单字节还是双字节,十六位还是三十二位的,这边我选择布尔变量, 设完之后点击确定就可以了,同理停止按钮是长臂按钮,程序中我选择长臂触点,在工具栏中选择长臂触点,然后给长臂触点变量命名为停止, 我们再给一个输出,在工具栏选择插入线圈,给线圈变量一个名称,接下来我们要并联线圈,我们点击要并联的变量,然后在工具栏中选择插入并联触点向下,然后把线圈的变量设给并联的触点上, 这边我们可以点击右侧按钮,我们可以看到下方有我们刚刚声明的变量名称,点击需要的变量名称后确定, 或者我们直接在这边输入刚刚的线圈变亮名称灯也可以。为了检验我的程序是否编写正确,我们可以进行仿真,下面教大家如何实现无实物仿真程序, 我们标题栏点击在线点击下面仿真,这时候你可以看到软件下方出现红色底纹的仿真,然后我们点击工具栏中的生成代码, 等待代码生成,生成成功后就可以下载程序制 plc 仿真器生成的代码必须是零错误才能下载,我们点击工具栏中登录跳出的弹窗点式就可以了, 现在我们已经连接上了仿真器了,但是我们的仿真并没有启动,这是为什么呢?我们点击登录右侧的启动按钮就行了。启动之后我们的梯形图也不能仿真,我们要退出。将该程序不插入到我的任务配置当中,我们点击左侧导航栏中 main task。 我们任务配置中还有意思看 master, 因为我们这边没有用到总线,我们只要插在 main task 任务中就可。在这边我们也可以设置优先级别,默认总线级别是最高的 p l c 运行优先执行任务。我们在 main task 任务中点击添 加调用,我们将刚刚的程序添加进来之后再重新下载程序。这边点击登录在线修改,程序已经开始运行,我们将需要修改的变量值在右边准备值中双击,双击后会出现出,或者也可以在梯形图变量旁边双击。 我们在程序空白处有机选择写入 device application 的所有值。可以看到线圈灯已经亮了, 我们要停止,要先将刚刚启动按钮复位。启动按钮复位完成之后,可以看到输出灯还是导通着,这就是起跑停电路的保持功能,将输出自锁,当我按下停止按钮后, 输出灯灭掉了,电路断开,我们双击将停止按钮复位。这个就是简单的奇宝停电路梯形图程序。下一个视频教大家如何用 st 语言去编写这个程序,我们下期再见,拜拜!
59小智同学爱搞机 02:58查看AI文稿AI文稿
02:58查看AI文稿AI文稿cut 四次编写 t 型图上一个视频,咱们建立了新工程,现在来编写 t 型图。 cut 四次编写 t 型图需要定义变量,在这个地方 b 二和 a 就 b 二之间定义变量。 我要编写一个自锁程序,比如说按铃冒号,它是一个布尔亮分号 m 一冒号,布尔亮分号 m 二,同样是冒号,写一个 b, 然后快捷键 c t r r 加 enter, 可以实现快捷输入。好,现在我定义好了,可以编写梯形图了。 编写梯形图它与信捷 x d 的不一样,它的四次指令是不能直接敲打的,在这个地方可以输入这个指令,常开常闭线圈输出,并连一个触点 插入并联触点相像,然后写入 emmy m m。 现在梯形图就编写好了,可以点击这个按钮,或者说点击 at f 八,登录, 先扫描设备, 点击扫描网络,扫出来以后选择这个设备,点击确定 要等这个绿色,这个绿色都有才可以连上。现在可以登录了,点击这个登录, 再点击这个启动,相当于运行。 brc, 现在这个梯形图已经下载进去了, 这个地方显示绿色,运行这两边也都是绿色的,现在运行它, 双击这个地方会显示一个 to, 然后写入, 现在已经导通了, 在双击贪绘取反变成 forth, 再写入它还是倒通的,所以说实现了自锁的功能,现在把它断开,写入就断开了。
207信捷科技 02:22查看AI文稿AI文稿
02:22查看AI文稿AI文稿工业控制领域正在被一个软件覆盖,它叫做 cotsys hotsys 是什么呢?一条视频告诉你。 cosys 是一套具有实质性的工业控制器开发编程软件,它是工业控制领域的通用软件。 有多少品牌现在已经支持了 cold sis 呢?已经超过了一千多家,因为它适配所有主流的通讯总线,比如说 model bus, can open, easy cat, perfect man 等等等等。我们可以用它来实现逻辑运算、运动控制,甚至用它来控制多头的机械手臂 和吸烟吸机床等等自动化设备。 cotis 软件,它通常安装在叉八六架构的电脑上,比如说我们常见的工业电脑 ipc, 不管你的电脑系统是 windows 还是 nids, 只要安装上 cotsys 之后, 他就拥有了传统 poc 的功能,比如说 io 控制,次服的运动控制或者逻辑运算。那这个软件他有什么组成呢?他有两个部分组成,第一个部分 分叫做开发环境,也叫 ide。 注意 ide 它只能安装在 windows 系统上面,我们就可以做程序编写、系统设定、程序诊断之类的操作。第二个部分叫做执行系统,也叫乱 tom, run tom 一般安装在我们的工业电脑上面,乱 tom 部分就不一定只能安装在 windows 系统上面。另 nos 系统它也是可以安装的。 costs 他也有自己的 hmi 界面,并且支持电脑网页端,什么意思呢?就是你用了 costs 之后,只要我们的工业电脑接上网络之后,你就可以通过网页的方式去浏览他的人机界面。这个时候有人就会有疑问, 为什么我要把一个平台分成两个部分装在两台电脑上面呢?我把 i d e 和 runtin 装在一台电脑上面不行吗?针对这个问题,我的回答是可以,但是我并不建议你这样做,因为一般的工业电脑并没有我们家用电脑的性能那么强大。如果你把 i d e 这个部分装在了 runtin 这台电脑上 的时候,你会发现你在开发的过程中会很卡顿。所以一般情况下我们都把 ide 装在我们的家用电脑或者笔记本电脑上面。那这个时候第二个问题又出现了,这两个部分装在两台电脑上面,他们之间的数据如何下载的?这个时候我们只需要通过网线把这两台电脑的网口设置在同一个网络上就可以了。 在软碳部分又分为两种,一种是 ctrl rte, 一种是 soft motion rte。 这两者的区别就是 ctrl rte 它只能做 io 控制。 soft motion rte, 它既能做 io 控制,也能做运动控制。通俗来讲就是模拟量和开关量的问题。 所以如果你要带四服的话,你就要选首模,选 r t e。 但是有两个品牌并不支持 costes, 你们知道是谁吗?
1.3万wellcon 00:14查看AI文稿AI文稿
00:14查看AI文稿AI文稿兄弟们,合川最新版本的运动控制器 q 一杠幺三零零杠 d 三,可以带三十二轴啊,性价比超高,兄弟们。
308叶强讲电气PLC编程调试 01:43查看AI文稿AI文稿
01:43查看AI文稿AI文稿p u c 的编程软件这么多,我们应该怎么选呢?我一共整理出来五款主流的 p u c 编程软件。第一个,三菱三菱的 gx works 二、 watch 二,它是支持在线仿真功能的,也是三菱 puc 下面最基本的一款编程软件。 如果你的 poc 是已经停产的 fx 一或者 fx 二 n, 那你选择 wox 二。同样的 wox 二,它也适用于还没有停产的 fox 三 u 和 q 系列。但是如果你的 poc 是 fx 五 u 跟 iq 杠 liq 杠 q, 你需要用到的是 ox 三。目前三菱的编程软件也就只有这两款 works 二跟 ox 三, 他们两个之间的用法其实是没有什么区别的,都是支持一键魔力仿真的。第二个,欧姆龙的叉七万,他适用于欧姆龙的中小型 p o c 这个编创软件,他是用的系列是 c p e c p e l c p e h c j c q c s c v 等等等等。凡是欧姆龙的小型、中型 p o c 都可以用到这一款欧姆龙的大型 plc nganxny 用的是什么呢?他们要用 cismart studio, 这个软件非常的复杂,不适合初学者学习。第三个,西门子,西门子 plc 二百 smar 用的是 markovsmar, 在网上就是三百四百一千二,一千五,这一些都是要用到国图,这个软件非常的强大,不但可以编写 plc 的程序, 还有触摸屏的编程主态软件,同样还有 v c c 仿真运动控制器。第四个,美国的卢克维尔,卢克维尔是公司的名字, a b 是他旗下的一个 p o c 的品牌。 a b 的 p o c 可以分为 marco logics 和 contact logics 和 ctrl logics, 分别对应的是小中大型 p o c 的三列,对应的编程软件是 i s logics 五百, logics 五千,还有个跟薄涂一样的 studio 五千。第五个就是 codesist, 要么就是在 codeses 平台上面开发的 pot 编程软件。 codeses 在我主页置顶的这个视频上面我有提到过,这里我就不多说了,你们觉得哪一个好呢?
8858wellcon 01:14查看AI文稿AI文稿
01:14查看AI文稿AI文稿这就是我们那个 coss 架构的六轴脉冲控制板,他是托机的运动控制器是不需要配电脑的啊。然后这个里面我们内置了机器人的运动学算法跟常规的工艺包,当然因为 cpu 的能力限制,所以我们没有把动力学算法加到里面, 因为我这个是脉冲输出的,所以你不但可以用绝对值的四伏,也可以用相对值的四伏,或者用步进电机加感应开关的方式来回原点,从而让你的整体电控成本变得特别的香。 然后你如果拿这个去做一些飞镖自动化设备的运动控制,因为我这个里面跑的是 cold sis 的平台,它的编程环境是按照 ic 六二幺三幺杠三的标准来的。 我们自己做了运动裤,当然这个裤是不开放的啊,所以会比你用常规的日系中型 p 二 c 加定位模块的功能来得更强大,会 比你用翠欧的运动控制器的编程环境更通用,让你工程师的学习跟招聘成本大大降低,因为现在搞 cool sis 的入门级工程师五千多块钱就可以招得到了。 而且这个版的成本真的很香啊,在带了三十六入二十四出的 io 跟六轴脉冲还有两路模拟量的前提下,开放原代码的裸版税前只要一千六百八。
680老陈头机器人机构件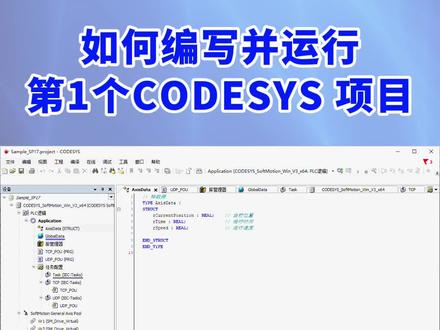 01:12查看AI文稿AI文稿
01:12查看AI文稿AI文稿如何编写并运行第一个 ctrls 项目?新手一定要点赞收藏。一、点击新建项目,选择标准项目, 自定义存储滤镜和项目名称。二、右键单击选择菜单项添加设备,然后就显示一个片系逻辑对象。三、创建程序,选择添加对象,然后在紫菜单中选择 puu, 给主程序起一个名称。四、通过双击编辑模块, 在编辑器窗口上定义一个变量 ctr, 收集类型为 i n t, 并用零初始化这个变量。就此我们实现了一个简单的程序,每当你调用这个没对象时,该程序就会对变量 ctr 实现加一。 五,双击 men task 对象来配置他,选择添加调用,然后选择你创建的程序 men, 点击确定。六、任务时间间隔设置为二十五毫秒,对于多任务, 按照优先级的高低来执行任务。七、点击扫描网络按钮,编译一下程序。八、在菜单栏在线 登录到下载程序。九、点击菜单栏的调试,启动运行程序,最后打开命程序,可以看到计数 gct 的值在累加。大白话讲公控,一听就懂,关注我,学习更多公控知识!
844艾莫迅&工控路人甲













猜你喜欢
最新视频
- 4845杨威科技