labview反馈节点输入输出在哪?
粉丝279获赞710
相关视频
 03:24查看AI文稿AI文稿
03:24查看AI文稿AI文稿很多人刚开始学莱伯威的时候不知道该怎么入手,今天我结合自己的经验讲一下怎么快速入门莱伯威欧。 相比于通过看书系统的学习一门软件,我更推荐先学会软件的基本用法,然后开始实践,在实践中边学边用,用到什么功能就学习什么功能,这样可以节省我们宝贵的时间去学习真正有用的知识。希望大家能够在看完这个视频后就可以直接进入实践了。 接下来进入正题。首先打开 live vivo 软件,你会看到这样一个界面,这里需要说明一下,很 很多编程语言编程时都是先建一个项目,也就是这里后缀为点儿而为 pioj 的文件。但是莱伯威尔的程序文件,也就是后缀为点 vi 的文件是可以单独运行调试的,对于初学者只使用 vi 就够了,等后面熟悉了再用项目。我们可以在菜单栏点击文件,然后点击新建 vi, 即可创建一个 vi。 一个 vi 包含两个窗口,一个是前面版,一个是程序框图。 前面版相当于是 gy, 是用来制作软件界面的。程序框图相当于是文本编辑器,用来编辑整个程序的算法。 我们先看前面吧,在前面版点击鼠标,右键会弹出一个空键的窗口,这里有很多 love 封装好的模块供我们使用,例如数值空间、波尔空间、自负串与路径空间等等。 把鼠标放在数值空间上,会弹出数值空间窗口,这里需要说明来标 vivo 的空间分为输入空间和输出空间两类,输出空间又叫显示空间,数值空间窗口中包含了多种数值 输入和显示样式,我们点击数值输入空间,然后在前面版适当的位置点击一下鼠标,数值输入空间就被放在了前面版中。使用同样的方法,可以在前面版放置一个数值显示空间,当然如果有需要,可以放置不同样式的输入和显示空间。 接下来我们再看一下布尔空间,布尔空间中有不同样式的开关和指示灯,我们也在前面板上放置几个布尔空间。 接下来我们再放几个自伏串与路径相关空间, 我们再放几个有代表性的空间,例如数组空间,错 表格空间,还有图表相关空间等,我们还可以放几个装饰用的空间。 数组空间和醋空间里面是需要放置内容的,具体的使用可以学习相关内容。 这些空间还有不同的样式,例如银色的系统的,经典的 logo, 提供了非常丰富的空间供我们使用。 love you 提供的空间不仅多,我们在每个空间上右键还可以对一个空间进行非常多的操作,这里就不详细介绍了,大家可以在用到的时候摸索。有这么多的空间和方法,大家肯定可以做出理想的界面。
4553房工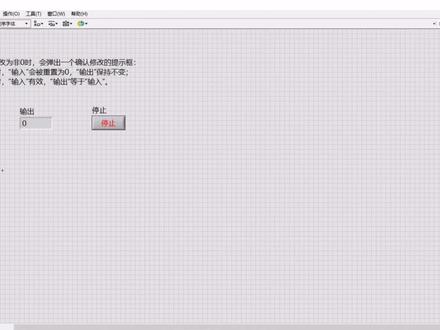 02:28查看AI文稿AI文稿
02:28查看AI文稿AI文稿我们先看一下这个程序的效果,在程序运行过程中,将输入由零修改为非零时,会弹出一个确认修改的提示框。当点击取消时,输入会被重置为零,输出保持不变。当点击确定时,输入有效,输出等于输入。 这个功能的作用是防止对设备关键词的误修改。接下来我们看一下这个功能是如何实现的。 我们看一下程序框图最外层是一个挖耳循环,在挖耳循环中,首先判断输入是否不等于零。当输入不等于零,且上一时刻输入等于零时,这部分逻辑的输出为真,否则输出为假。 这部分逻辑中,这个是语逻辑,这个是非逻辑,这个是反馈节点,反馈节点用于保存上一时刻的值。他为 于函数面板的结构中,他可以改变方向,当连接不同的数据类型时,会显示不同的颜色,可以通过下面设定出示值。 接下来四个条件结构,当前面的逻辑为假时,输入直接传递给输出。当前面的逻辑判断为真实,会执行条件为真的这部分逻辑。这部分逻辑中首先是一个双按钮对话框,它位于函数面板的对话框与用户界面中, 他就是刚才运行过程中弹出的提示框。他的三个输入分别是,对话框、消息名称输出为真的按钮的名称输出为假的,按钮的名称。 这里点击确定按钮输出为真,此时输入直接传递给输出。当点击取消按钮时,输出为, 则将数字零写入输入并传递给输出,也就实现了刚才演示的功能。 接下来我们看一下对话框弹出时对程序的影响?首先,我们在程序中再加入一个周期为一百毫秒的外循环,并对两个外循环的执行次数和对话框的输出进行观测。 修改后的前面板是这样的,我们运行程序通过观察可以发现,每次弹出对话框时,第一个袜子循环都会暂停执行,第二个袜子循环正常执行。当之前已经点击过确定按钮输出为针时,重新从零改为非零值。 虽然指示灯亮着,但是由于此时袜循环已暂停,因此输出仍为零,符合设计要求。
72房工 04:16查看AI文稿AI文稿
04:16查看AI文稿AI文稿应粉丝的需求,写了一个看豹纹的收发程序,硬件用的是创新科技的看分析仪,其他的硬件也可以用类似的方法实现。程序最后的效果是这样的, 上面是第一针豹纹三个信号的发送和接收,下面是第二针豹纹三个信号的发送和接收。由于我只有一个硬件,因此我用的是自测模式,也就是自己发自己收。这个例子实现了多针豹纹的发送接收以及看豹纹解析的功能。接下来我们看看是如何实现的。 首先看看硬件连接,硬件只有一个,看分析仪用导线分别连接,看一看二的高以及看一看二的低,并且看一看二,各选择一个一百二十五的中端电阻。然后我们看一下程序是如何实现的。为了更好的理解,我们先看一个单针豹纹手法的程序,程序框除的架构 是一个平铺式的顺序结构,分为三部分,第一部分功能是打开看通信,第二部分是进行看的发送和接收,第三部分是关闭看通信。 我们先看第一部分,这部分逻辑使用到了醋场量以及按名称解除捆绑函数。醋场量的作用是将数据打包,一根信号线可以传输一组数据方面,后面使用按名称解除捆绑函数的作用是在醋中取出需要的信号。 第一部分逻辑主要是参考看分析题自带的程序。首先是配置,看分析级参数,在配置的时候需要确认每一项的值是否与说明文当中的值是一致的,因为有些硬件改了好几版,参数值也发生了变化。 配置完成后就要用第一个函数打开设备,当函数返回项为 ok, 也就是返回值为一时,调用第二函数初始化指定的 看通道。这里我们指定的是通道一,当函数返回相为 ok, 调用第三个函数打开指定的看通道。 当返回项目 ok, 点亮指示灯,说明意见,打开成功。如果要打开多个看通道,需要多次调用第二和第三个函数 注册模式,只需要打开一个看通道。在第一部分逻辑中,还有一个模块,作用是将所有的值初始化为默认值,也就是在运行后面的程序前,将前面版中修改的值重新初始画。例如之前我们修改过前面版中的值,当重新运行程序的时候,这些值被称之为默认值。 程序运行完第一部分逻辑后,会自动进入第二部分逻辑。第二部分逻辑是看的发送和接收,主要是用了两个 y 循环和两个接口函数,分别是豹纹发送函数和豹纹接收函数。将两个接口函数分 分别放在两个外要循环中,是为了周期性发送和接收豹纹。豹纹发送和接收的周期就是外要循环的周期。在豹纹发送逻辑中,我们使用到了醋的按名称捆绑函数,这个函数的作用是替换一个或多个促元数。 在调用发送函数时,除了硬件相关配置外,我们可以使用按名称捆绑函数设定要发送的豹纹 id。 现在 table 值至为一是只发送一次,发送失败不会重复发送,因为豹纹本身是周期性发送的。 接下来是设置要发送的豹纹长度,一般都是八个字节,最后是设置要发送的八个字节的数据,八个字节是按照 dbc 设置的。关于 dbc 解析后面讲在豹纹接收逻辑中,首先是对豹纹接收函数进行硬件配置,接下来是判断是否收到了豹纹,如果接收到的数据为空, 则不进行任何处理。如果接收的数据不为空,则对接收度的豹纹进行解析。接收函数一次可以接收多针豹纹,这里我们只写了解析一针豹纹的方法,后面我们会说明如何解析多针豹纹。如果不按前面版的停止按钮,程序会一直运行第二部分逻辑的两个外偶循环 进行看报门的发送和接收。当按下前面版的停止按钮后,两个 y 循环会依次停止运行程序,进入第三部分逻辑。第三部分逻辑是关闭程序的处理,通过调用关闭设备函数来关闭硬件设备,当函数返回值为 ok 时,关闭第一部分逻辑打开的指示灯。 最后是将停止按钮复位,由于停止按钮的机械动作是单机时转换,如果不对停止按钮复位,停止按钮就不会弹起。有些程序点击了停止按钮后,程序会过一段时间才会停掉,可以通过停止按钮弹起表征程序执行完成。
550房工 01:51查看AI文稿AI文稿
01:51查看AI文稿AI文稿今天总结一个比较有意思的函数,值改变函数,讲这个函数主要是他的实现方式比较有意思。在讲这个函数之前,先自己搭一个值改变的判断逻辑。一般判断值改变的逻辑是使用反馈节点函数,这里以数值改变为例,具体逻辑如图所示。 为了每次运算的一致性,会给反馈节点一个初始值。当需要首次判断输出为假时,只需要将输入直接连接在反馈节点的初始值上。当需要首次判断输出为真时,只需要将不同于输入的值连在反馈节点的初始值上。 接下来看看只改变函数是如何实现的。双击这个函数,打开这个函数的词 bi, 可以看到输出控件的名称就是改动或首次调用, 说明首次调用时输出也为真。打开只改变函数的程序框图,通过这个程序框图可以学到四个知识点。第一个知识点,首次调用函数。这个函数很好用,有时候一些逻辑只需要运行一次,这时就可以使用这个首次调用函数。 第二个知识点,使用移位计算器替换反馈节点函数。有已经使用过首次调用函数,这里不需要给移位计算器付出使值。第三个知识点, level 中的 y 循环至少会运行一次,类似于 c 语言中的 dow, 这里的外外循环每次调用就只运行一次。其中知识点二和三一起可以实现全局功能变量,全局功能变量不存在数据竞争的问题。第四个知识点,逻辑中使用到了 变体,变体数据的最大好处就是变体数据兼容各种数据类型,使用变体可以使指改变函数连接各种数据类型进行判断。
166房工 01:54查看AI文稿AI文稿
01:54查看AI文稿AI文稿今天的视频说一下属性节点,一般有两种方式来创建一个空间的属性节点,一种方法是在空间上点击鼠标右键选择创建,选择属性节点,然后再选择要创建的属性。 第二种方法是先在空键上点击鼠标右键点击创建,创建一个引用,然后在引用上点击鼠标右键选择创建, 选择属性,然后选择要创建的属性值。也可以通过函数面板选择属性节点,然后 选择属性。 那这两种方式有什么区别呢? 第一种方式是创建起来比较简单,第二种方式使用起来更灵活。接下来通过一个饭店来看一下两种方法的区别。这个饭店的第一部分逻辑用的是第一种方法,这种方法也叫隐私链接的属性节点,这里这个属性节点只能改变指定的这个数值空间的属性。 第二部分逻辑使用了引用甲属性节点,通过这部分逻辑可以看出,同一个属性节点可以指向不同的空间,引用可以改变不同空间的属性。第三部分逻辑是将一个引用传递给了指 vi, 通过指 vi 来调用空间的属性,这种方法也是链接的属性节点是无法实现的。 我们看一下前面的运行的效果,通过禁用状态可以控制数值空间是否禁用,通过选择空间, 选择要控制的引用,通过改变可见性来改变引用空间的可见性。波形图表外标识的范围可以通过两个数值空间进行修改。
212房工 11:10查看AI文稿AI文稿
11:10查看AI文稿AI文稿大家好,欢迎收看有三亿电子工作室推出的 level view 与仪器控制系列视频教程零一篇 level view 与串口仪器控制, 我们今天开始讲第五节串行通讯简介, 我们讲的这一门课呀,叫 level view 与串口仪器控制,它适用于呢, r s 四二, r s 二三二总线, r s 四二总线以及呢 r s 四八五总线。 那么什么是串口呢?为什么要这三种总线一起讲,为什么他都适用于这三种总线呢?我们一步一步的来讲,我们先讲一下什么是串口,串口啊是串线 总线的一种。我们在上一节课讲总线的时候呢,给大家介绍过这个总线啊,按照不同的这个工,按照不同的这个要求呢,可分为这么几种,就说按照功能和规范分呢,分片总线、内总线,外总线, 按照传输数据的方式呢,分为串行总线和并行总线。这样呢,我们讲的这个串口呢,就是指按照数据传输的方式分的,他叫 串行总线。当然啊,这个串口呢是属于串行总线的一种,串行总线呢,是有很多种类型的总线的,我们下面先看一下串行总线与并行总线的这个区别呀,并行总线呢是 是多路线路同时传输,比方说呢,我们在这个计算机的这个运行过程中啊,以最小单字节,呃,最小单位呢是位,然后位的在上一集呢,是一个字节,一个字节呢就是八位, 如果是一个八位的并行总线呢,他一次传输的就能传输一个字节,就相当于传输八位。 那么这个串行总线呢,是单路数据传输,单路数据传输,比方说我要传输一个字节的数据呢,我先一个字 一个字节中一个位一个位的传输,传输八次呢,才能够把这么一个字节传输完毕。看看这个图呢,有一个星象的描述,大家一看就能看明白了,比方说我传出一个字节八位他一下呢, 比方说是一个八位的并行总线,我八根线路同时传输,那么我一次就能传输八位的数据,那么我串行总线呢,相当于是只有一路在传输一次呢,只能传输一位的。 看看,如果我们传输一个字节八位的数据化呢,要先把这个一个字节的八位呢,从高到低,或者是从低到高呢,一位一位的进行这么传输。下面呢,我们就从这个图案也能看出这个并行总线与串行总线的这个特点来。 并行总线呢,是以字节或字节的倍数为传输单位,一次传送一个或一个以上的字节的数据,数据的格位呢,是同时进行传 送的,适用于的外部设备与 pc 之间进行近距离大量和快速的信息交换。 计算机的各个总线传输数据时啊,就是以并行方式进行的。 并行通讯的特点呢,就是传输速度快,但当距离较远,位数较多时呢,通讯线路啊复杂且成本高。 就说呢,大家这总结了一个特点,就说他传输的快,但是他传输的快呢,是以多路的方式为代驾实现的,所以说呢,他的这个通信线路较复杂,并且呢成本较高。 我们看一下这个串行通讯,串行通讯双方呢,使用一根或两根数据信号线相连接,同一时刻呢,数据在一根数据线, 信号线一位一位的顺序传送,每一位数据啊,都占据一个固定的时间长度。 与并行通信相比呢,串行通信的优点啊,是传输线少,成本低,适合远距离传送,易于扩展。 缺点呢是速度慢,传输时间长。当然啊,这个缺点啊,不一定有,现现在随着科技的发展啊,这个缺点啊啊,这个串行通信的这个缺点,慢慢慢慢的就越来越 容易给他克服了,容易给他克服了,现在串行通讯的速率呢,也是非常快的,咱们在下一个看一下特点,如计算机常用的 com 设备,就说咱们讲的这个串口 usb 设备,网络通信 设备,就是指这个网线啊,都是采用的这个串行通讯,对不对?这个串行通讯呢是分很多种的,我们讲的这个二二四二三二啊,四二二四八五啊,是串行通讯中的一种,就是指的这个 com 设备, 还有其他的一些像这个 usb 设备都是外总线网络通信的,这个网网线对不对?都是外总线,内总线还有什么 spi 总线啊,这一堆一堆的穿行总线是分很多种的。 好,我们讲完了串口和串行通讯的定义之后呢,我们下面再说一下,为什么我们讲的这个串口通讯适用于二三二 s、 二三二四二二和四八五。我们前面讲总线的时候呢,给大家 提过总线啊,有电气标准、机械标准和通讯标准三大部分组成,这个电气标准和机械标准呢,就是指的硬件标准,这个通讯标准呢就是指的软件标准。 这为什么适用于这三种总线呢?是因为虽然他的这个硬件标准规定的这个电器特性不一样, 但是他们的软件标准是一样的,他们都可以在上面都可以跑 u a r t 协议,都可以跑 u a r t 协议,是因为他的软件标准一样采用了同样的协议,所以用的是同样的 windows 的底层驱动程序,所以说我们下面用 level view 来实现这个 串行通讯的时候,用的是一样的程序,用的是一样的程序,为什么是用的一样的程序呢?我们前面讲过 libovio 仪器控制本质的时候,给大家讲过 莱博 vo 控制仪器的本质呢,实际上是也是调用的底层的 windows 的 api 驱动,这样呢是因为用的同样的底层驱动,那么所以说我们的莱博 vo 程序也是一样的。 下面我们就看一下这个 uvrt 协议,他是什么样的一个标准是或者是说什么样的一个内容啊? 这个 u e r t 协议呢,大家可以看一下,它也是非常简单的,它呢是用一个起始位啊,代表一个数据的开始, 中间呢有八个数据位,然后呢以一个停止位啊,代表这么一个字节的传输。也说串行通讯呢,他传输啊,他 的一次传输的内容或者是一针的内容呢,是一个字结,虽然是一个字结,然后怎么来代表这个一个字结的开始和结束呢?他用的是一个起始位和一个停止位。数据传输的时候呢,比方说先传输这个起始位, 在传输这个数据为零,数据为一,数据为二,然后传输到数据为七,传输完了之后呢,再传输这个停止位,他是这么一位一位的传输的,传输的单元呢,就是这么一针一针呢能够传输八位数据,就是传输一个字节前面加了一个针头,就是其 位,加了一个真位就是一个停止位。好,我这呢就简单的呢给大家提一下,你比方说我们配置这个串口的时候,是不是要配置波特绿啊?配置这个波特绿代表什么意思呢?就是配置的这个位宽,就说呢我多长,这个 比方说七十位是低位吧,代表这个低位的这个代表的这个低位的这个时间的长度,比方说我波特率高的话,可能这个低位的时间长度就很 很很窄,然后传输的这个数据位呢,就每一位的都很窄,如果这个波特率小的话,他这个位宽呢就很长,波特率小了,这个位宽长了,是不是就传输的慢了呀? 然后这个数据位呢能够设置数据位,设置七位啊还是八位啊?就是是中间的这个数据位,然后停止位呢,这可以设置,就是指的最 最后的这个是这个停止位,当然还有一个窖烟位和刘控制啊,我们呢一般呢都不用,一般呢都不用,一般只需要设置这个波特率数据位和停止位就可以了。这呢我只是给大家简单的介绍这个 uant 的协议啊, 如果大家想详细的了解或者想吃透这个油烟 t 协议的话,大家呢还是要到网上找一下资料来学习一下什么是油烟 t 协议, 当然你看完了这个 u a r t 协议之后呢,也记最好还要再找一下这个二 s 二三二四二四八五,它的硬件标准,滇西特性不是不一样吗? 大家可以在网上找一下这三种总线的区别,他们是怎么演变来的,他实际上是由二三二演变成四二,然后呢 再发展成四八五,再发展成四八五,以及呢他们的呃特点都是什么?为什么要慢慢慢慢的出来?后面的这几种总线 办出线的目的是什么?你就说来,带着这样一个学习的目的,有一个探究的精神,然后呢你才能够哦彻底掌握住这个创新总线的这个硬件标准和软件标准,因为啊,我们这是一个讲 level view 的课程, 我先这些其他的内容呢,我这呢简单的给大家提一下,大家呢还是要在下面呢多多搜索一些资料,彻底掌握这些东西。 好,我们这节课呢就讲到这,在课程的最后啊做一个小广告,如果大家对我们的教程感兴趣的话,可以通过几种方式呢获取我们的淘宝店铺地址,购买 我们相应的视频教程。在最后呢送大家一个福利,大家用手机扫一扫这个二维码,或者呢直接打开这一个网址呢,就可以获取到一个神秘的福利。好,最后啊,大家也可以关注一下我们的微信公众号,一监控,好,谢谢大家。
130三易电子工作室 03:13查看AI文稿AI文稿
03:13查看AI文稿AI文稿上个视频实现了单真豹纹的收发,这个视频讲一下看豹纹的数据格式。我们以表格中的四个信号为例,表格中我只列出了关键的几列数据,豹纹 id 等一些信息并没有列出,这不影响我们理解豹纹。解析 表格中第一列式信号名称,第二列式信号描述,这两列是对信号的定义。第三列式,排列格式。这里我们讲一下看豹纹的排列格式。看豹纹排列格式主要有两种,一种是英特尔,一种是摩托罗拉。 英特尔格式的特点是信号的高位位于高字节的高位。信号的低位位于低字节的低位。假如有个英特尔格式的信号,其实位是十二。注意,英特尔格式其实位是信号的低位。 如果信号长度是四,信号在一个字节内,根据英特尔格式的特点,信号的高位位于该字节的高位,信号的低位位于 也该自己的低位,所以信号剩余的三位在起始位的左侧,也就是位编号大的一侧。信号位置如图所示。 假设信号长度为十,此时出现了跨字节。由于信号的高位在高字节,因此剩下的六个位位于更高的字节,也就是第二个字节。又由于信号的高位在该字节的高位,因此剩下的六个位排列在该字节的右侧,且信号位越高,对应的位编号越大。 有图也可以看出,对英特尔格式,不管是单字结还是跨字结,信号位对应豹纹位的编号是连续的,并且信号位越高,对应豹纹位的编号越大。 我们再看摩托罗拉格式,摩托拉格式的特点是信号的高位位于低自己的高位,信号低位位于高自己的低位。假如有个摩托罗拉格式的信号,起始位是十二。 注意,摩托拉格式需要说明起始位是信号的高位还是低位,默认是信号的低位。摩托罗拉 msb 是指信号的高位,是起始位。摩托罗拉 lsb 是指信号的低位,是起始位。 我们假设这个信号是摩托罗拉 msb 格式,也就是起始位是高位。假设信号长度是四,根据摩托罗拉格式特点,在一个字节内,信号的高位位该自己的高位,信号的低位位于该自己的低位, 所以信号剩余的三位在起始位的右侧,也就是位编号小的一侧。四个信号也可以说成是信号格式为摩托罗拉 l s b。 起始位为九,长度为四的信号。 假设信号长度为十,此时出现了跨字节。由于信号第一位在高字节,因此剩下的五个位位于更高的字节,也就是第二个字节。又由于 信号低位在该自己的低位,因此剩下的五个位排在该自己的左侧,且信号位越低,对应的位编号越小。由图可以看出,对应摩托罗拉格式信号在一个字节中的位位越高,对应豹纹位的编号越大。当信号跨字节后,信号位越高,对应的豹纹字节越小。 我们再回到最初的四个信号的表格,根据表格中间的系列信息和刚才讲的排列格式说明,可以确定四个信号在豹纹中的位置。位置如图所示, 表格最后两列是精度和偏量,精度,也就是分辨率。在报温解析时,我们可以使用精度信息将信号转换成连续的非负整数。偏量的作用是将负数转换成非负数。
569房工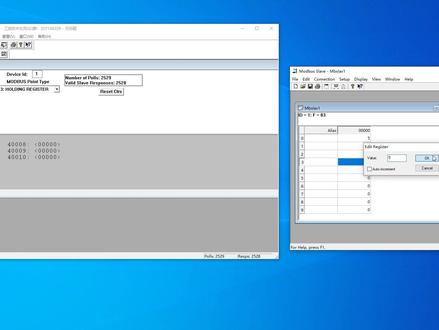 11:32
11:32 08:18
08:18 17:07查看AI文稿AI文稿
17:07查看AI文稿AI文稿本节课我们讲一下紫薇埃的生成与吊用, 咱们上节课讲了压力测量和温度采集,咱们这节课就把这个就是将这个压力测量作为主程序去调用这个温度采集, 咱们看一下这个温度采集怎么去生成一个紫薇埃,咱们先打开运行一下,看一下运行 好停止没有问题,但是咱们这个一串数字,咱们这跟上一节一样,把它这个修修整一下, 好的再运行一下, 好的室温是十几度,那么停止保存一下, 咱们将这个 vi 复制一下,复制到这里边,然后将它生成一个紫 vi 去吊用, 咱们重表扬一下 温度采集紫 vi, 咱们打开康是我家艺, 咱们将它生成一个紫薇埃的时候,咱们就不需要这个外边这个框, 因为咱们的主程序里边已经打开这个采集板和关闭采集板,咱们只需要中间这个运行这一部分就可以了。 咱们现在把它删掉,右键在上面右键之后删除顺序结构,就把它删了,然后把这两个都删掉,我要循环也是一样的,在上面右键 删除外耳循环,咱们只留这一这样一个主要的这个 这个温度采集步骤, 咱们看一下前面版,咱们这个室温 达不到一百,然后咱们把它修改的小一点,这有个标尺, 咱们把它修改到四十度吧,这样更醒目一点。 好,咱们现在看一下这个右上角,这里, 这里是生成紫 vi 的时候,他的一个接线端,这个 是这个图标,他的一个图标,咱们先看接线端,鼠标放上去之后,右键你就会看到,你就可以添加或者是删除接线端,或者是选择一些其他的模式,这么多, 这选择一个三对三,这个咱们没有这个输入,那咱们就 给他一个输入吧,这右键竖直,咱们一个输入空间, 这个咱们给他一个温度采集 通道, 之前咱们是一个固定的长量是灵通道,他们现在将他接到这个 这个这个输入端子上,这样的话咱们就可以随意的修改这个通道。 好,咱们点击右上方这个块,然后去选中咱们这个输入接线端, 这时候他这个颜色就变了,说明咱们这个极限端已经设置好了,然后这个输出 咱们分开这个放右边,先点击他,然后点击这个电压值,好,点击,这样三个输入就输出就设置完了。咱们去看一下他的图标, 右键编辑图标,这个图标我们可以这个自己去画,或者是 他给我们了很多图标去供我们参考,咱们这就用他们给我们的图标, 因为画的时候不一定会画的好看。 小灯泡吧,就这个小灯泡吧,咱们选择选择之后拉着它拖动,拖动到上面就可以了, 和咱们这个小灯泡拖过来,确定 这就是咱们紫薇埃的一个生成,咱保存一下 关掉, 咱们现在去 写一个主程序,咱们将这个压力测量复制过来, 好,咱们打开它 这个主程穴,咱们还是这样, 咱们现在要做的是将这个紫薇埃嵌进去, 咱们这样加一个这个顺序,结构 好,右键添加针, 再打开之后先运行,打开采集板之后先先运行这个压力采集,然后再去运行这个温度采集,最后关闭 usb 这一部分,咱们不用动他 这一部分,咱们这样右键选择 vi。 好,相关教程在他下面有一个紫薇埃,确定好,就这样一个这样一个紫薇埃的一个图标, 这个太难看,咱们,咱们咱们把它关掉, 先不要保存,咱们再进行给他修改一下,右键编辑图标,加一个小框, 就这样吧。好,咱们确定 跑车 结构顺序, 后面添加针,将温度采集这个紫 vi 放进去,选择 vi, 选择温度采集紫 vi 这个图标。 这个时候咱们看一下这个程序的流程,先打开 usb, 然后直行这个 vi, 要循环里边的东西,先执行这个压力测量,然后测量者完之后顺序执行这个温度采集, 当按停职的时候关闭 usb。 好,咱们这个接线端子给他接一下, 这个是温度采集通道,这一个是电压值,温度和这个温度计, 咱们这里我就不写了,我然后我从这上面直接复制过来 control, 先把这个关掉,好,复制完之后咱们这对它进行连接一下。 好,这个温度采集通道,咱们这个板子上现在的现在连的是零,所以咱们这这个压力通道,咱们这就需要改一下了, 咱们这里也给他一个这个输入,这样的话就可以改他的值, 因为咱们上次也是零通道,他们两个是一个通道的, 咱们先把它改成这个压力, 这个咱们都放在下边, 我们对齐一下, 这边不好识别,咱们这右键加一个装饰, 有一个线,咱们这从这把它分开, 咱们运行一下,看行不行。保存,将压力测量这个极限端子也连一下,咱们选择一个一端, 咱们这个硬件连接完之后,咱们再检查一下, 这是一个,这是一个一啊,这通道咱们这就把它连接到这, 他现在你看他这出了一个小圆点,然后他主要就是因为这个, 他的这个数据的类型不对,咱们改一下 脚踏板, 把这个改一下,把这个先改一下这个不可见,这个咱们改成中指运行, 跑车运行。 好,这个先看一下这个温度,灵通道给他一个 温度他就上升,再看一下这个压力,这个压力给他一个压力,这个好像不太正确, 咱们看一下是哪出了问题, 咱们看一下这个转换系数,这个转换系数他应该是一百二十三点七五, 这个时候就正确了,咱们给他一个压力,好,当他达到三的时候,三千克只是 的灯变黄, 然后这个温度给他一个温度,咱们手的按着他,他就会一直上升, 这就是咱们的一个紫薇埃的生成与吊用。
 12:38查看AI文稿AI文稿
12:38查看AI文稿AI文稿大家好,今天给大家介绍一下最简单最容易上手的 love you 控制不禁电机的方法及过程。本视频主要分以下四块内容进行讲解 我的实验方法,然后硬件接线, love u 软件编程以及做一个不进电机定场运动效果的演示。下面我们来看一下我的方法, 我们用个图来看一下我的方法流程。上位机使用 love 变成语言 连接一个运动控制卡,在在这里我用的是一款 usb 两轴的运动控制卡,运动控制 卡连接不禁电机的驱动器,驱动器驱动不禁电机运动,电机运动,我这里用了一个不禁单杠丝滑台来做演效果的演示,电机运动的话就带动这个单杠丝转动, 单杠是上面的滑块,就会从一个距离运动到另外一个距离。下面我们就来看一下硬件如何接线吧。 这是我用的一款 usb 两轴的运动控制卡,这是我们实验要用的一个不锈钢丝滑台, 这个华台的导程是一个螺旋杠的距离就是八毫米,这个形成就是重复极限 正极显他们之间的距离。下面我们来看一下硬件设备如何接线。首先我们要连接一下不进电机与驱动器,不进电机与驱动器的接线主要要看不进电机上面的标注。 不禁电机的四根线分别要接到我们驱动器的 a 正、 a 负、 b 正和 b 接口下面的 vcc 和 gnd 是这款驱动器供电电源的接口,在这里我们接入了一个二十四伏的开关电源, 不仅点击与驱动器连接,之后我们连接一下驱动器与我们的运动控制卡,由于运动控制卡是发脉冲给驱动器的,所以我们找到运动控制卡 脉冲输出以及方向输出的接口,这款运动控制卡的脉冲和方向都是 npn 输出的,所以我们在驱动器连接的时候,要把运动控制卡的输出接口接到我们驱动器的 puf 方向的接口,接到我们驱动器的 dirfpul 证和 dir 证接口。我们这里要连接一个五伏的电源,在我们的板卡预留有一个五伏的电源接口, 这样我们的运动控制卡与气动器就已经连接好了。下面我们连接这个不仅四杠滑台上面的三个位置传感器,负极线,正极线以及 原点位置三个位置传感器的与我们运动控制卡的接线,这三根线的蓝色线统一接到我们运动控制卡的金地接口,棕色线分别对应到我们运动控制卡的正极线,负极线以及圆点位置接口, 这样我们的位置传感器接线也一定完成。如果需要同步位置技术的话,我们需要连接一下编码器的接线。我们先看一下这款编码器,编码器主要有四根线,黑色、红色、绿色以及 白色,红色我们可以接到我们运动控制卡的 vcc 接口,黑色线我们接到运动控制卡的金地接口,白色线和绿色线。 因为编码器输出延伸偏的,所以我们的红白色线和绿色线也分别接到我们的编码器的一一负和一逼负接口。编码器的一一正和一逼正接口也同样需要一个五伏的电源, 这样我们的编码器接线也已经连接成功,在我们的下面可以看到这里有一个急停键,急停需要短接一下,接到我们的接应地, 在板卡的左侧,我们可以接一个十二伏的电源供离这款板卡供电。 在运动控制卡的左下侧是一个 usb 接口,我们需要用我们绑卡配套的 usb 线连接一下 usb 线,找到板卡资料包里面配套的驱动安装一下,安装成功后会在我的电脑设备管理器里面看到这款运动控制卡的型号, 这样我们所有的硬件接线都已经完成了硬件接线连接好了,那么我们现在就来看一下 live view 控制电机进行一个定场运动的程序来如何编写, 这里有一个我已经写好的一个定藏运动的程序,在进行程序讲解之前,我们先讲一下我们的这个我用的这款 usb 两轴运动控 控制卡是怎么与 w 进行连接的,我们在 w 的程序框图界面,可空白处可以右键点互联接口库与可执行程序调用库函数接点 放置一下,然后双击找到我们这款运动控制卡提供的资料包里面的 dl 裤 选定,选定之后我们可以看到下面有个函数名,里面有这款运动控制卡各种运动模式以及打开设备,关闭设备以及 l 功能的一些函数, 我们这些函数都可以调用,比如现在我们要首先调用打开设备函数,我们可以选定一下这个函 数,选择调用规范,选择 std 靠,然后参数按照说明书设置一下,这个函数只有一个参数,我们设置一下就行, 设置好之后我们可以点右键名称格式显示名称,这样就知道我们调用的是哪一个函数了, 我们这个程序中所有要用到的库函数都是这样调用的,然后每个库函数的参数都不一样,这个我们需要参照我们说明书的第四部分函数说明进行设置。 调用的每一个函数就有都有具体的函数参数,我们按照这个函数参数进行设置就可以了。 好了,下面我们开始讲解一下程序的思路。 首先我们在这里调用了,打开设备函数之后,设置初始画一个运动轴,然后设置一个运动轴使能 在这里我们调用了一个定常运动的函数。定常运动的函数我们可以看一下说明书, 定长运动,这个函数可以设定运动轴及曲线类型,运动方向以及脉冲输出模式,初始速度,运行速度、定长距离 以及开始减速的位置,加速时间,减速时间,这个函数是以初始速度开始开始加速的,然后再 我们设定的加速时间内到达,到达我们设定的运行速度开始横竖运行,直到脉冲输出个数大于或者等于我们在 我们设置的减速位置设定的设定的脉冲个数是开始减速,然后在指定的减速时间内减速到我们的初始长初始运行的速度,然后完成我们设定的定常运动的总距离脉冲个数之后就会停止。 我们看一下这个程序, 这个就是正常运动的 各个参数可以设置脉冲模式,初始速度、运行速度、定长距离、减速位置,加速时间、减速时间的。我们在调用这个函数定常运动函数之后, 可以调用一个读取当前逻辑位置的这个函数, red please, 这个函数是可以读取一个轴的逻辑位置,然后还可以读取他的运行状态以及他处于的一个极限位置开关的状态, 我们都可以显示出来,在这里我切换到前面吧,我们可以看到更详细一点,这是我们设定的 定长运动这个函数的初始速度,运行速度,加速时间,定长距离这些参数。这是我们读取逻辑位置时,可以读取到我们一个一个轴电机运行的状态。我们还 回到我们的程序,可以看到我们因为要一直读取,就是一直在运行状态,要读取这个 运动轴的逻辑位置,所以我们在这里添加了一个 vr 循环,在我们不需要运动的时候,点击停止按钮就可以了。在程序的最后,我们调用了一个关闭设备的函数, 下面我们就运行一下这个程序,在这里我们设置的初始速度, 运行速度,加速时间以及定长距离减速时间。在这里要提一下这个定长距离,我在这里设的是一万两千八百个脉冲在前, 前面我们提到过这个,我用的这个实验的这个单杠四华台转一个导程,这就是转一个一周是八毫米, 然后我们的驱动器现在 s 一、 s 二和 s 三 全部处于 of 的状态,然后对应的是六千六千四百个脉冲,然后会转一周。我在这里设定的是一万两千八百个脉冲,也就意味着他可以转两周, 也就是八毫米乘以二等于一点六厘米,可以看一下我们现在划快所处的位置,我们以这个边 为基准,大概就是十四点六的位置, 我们点击启动运行一下, 我们现在看一下瓶子的位置,还以这个边缘为机子,大概就是 十三正对应十三十三厘米,这个位置和我们刚才计算的是运动一点六厘米的距离是完全一致的, 这就是我们定藏运动效果的一个演示。
 01:00查看AI文稿AI文稿
01:00查看AI文稿AI文稿嗨,大家好,我是从小言,今天和大家聊一聊 lovely you love meow 是公共尚未机行业中非常给力的中文图信号的直观语言。 在公园中,他的应用涵盖的从研发、测试、生产到服务的产品开发所有阶段。但那边菲尔在测试、测量和自动化等领域具有更大的优势,因为那边菲尔提供了大量的工具和函数位于数据采集分析且适合存储。同时,他还提供了 大量采用于自动化测试测量领域的图形空间,可以说,他是测试你与工程师们的得力武器。结合中原科技十多年以来的工程按钮来看, no vio 广泛应用于自动测试系统、机器视觉尚未机软件开发、数据库测试系统开发、 mass 数据采集上传、二维码上传、打印扫描等装置。言之, nebellel 具有中文图形化、简单直光、学习门槛低、折性高、开发周期短等优势。中沿采用 nebeel 与 c 佳佳结合开 高速都和必经处理,坐等了开发时间的同时提升了程序效率。下期和大家分享什么是前面吧,什么是程序。关注忠言,让测试设备更快、更准、更稳!
89千轴万点科技 07:30查看AI文稿AI文稿
07:30查看AI文稿AI文稿类 id 是 love you 对象的类标志符,指读属性,该属性返回的数据类型为三十二位无符号长征性。通过该属性可以识别 love you 中的某一类对象。 运行程序现在已经获取了这三个空间的类 id 数值,类空间的类 id 为十八 字不穿类空间的类 id 为二十七布尔,类空间的类 id 为八。 通过来不如对象的类 id 可以获取某一类对象的 id, 可以对这一类对象进行批量操作。本程序的功能是为醋中所有的数值空间负值一百,为所有的自负颤空间负值 a。 程序中用到了醋类的空间属性,通过该属性可以获取醋中所有空间的引用区别,这与前面板类的空间属性是类似的, 通过前面板类的空间属性可以获取前面板中所有空间的引用区别。 运行程序数据已经被修改,也可以将直属性的锯柄数 入端直接连接到,所以输出 修改下数据,运行程序速中所有空间的值已经被修改为六百。 通过醋类的属性节点控件得到的是巨饼数组,这个数组中的元素的顺序是如何确定的呢?或者说醋中控件的顺序是如何确定的呢? 通过右键菜单重新排序醋中空间,可以进入醋的排序模式。 下面我们看一下触中空间的排列顺序, 数值空间一在醋中的排列顺序为顺序零,那么数值空间一的引用巨丙就是醋的空间属性所返回的巨丙数组中的第零个元素。 字符串空间三的引用巨柄是醋的空间属性所返回的巨柄数组中的第五个元素 顺序设置,这里默认是零,点击某个空间,就可以将该空间 设置为醋中的第零个元素后面的这个数字。四是该空键原先在醋中的顺序, 点击取下按钮可以取消本次设置,点击确认按钮可以使本次设置生效。 通过 love you 的类层次逐级向下地推,也可以找到 vip 这个属性。 我们看这个程序,程序首先通过前面板的空间这个属性 获取前面板空间的引用锯柄, 但是 通过这个巨柄只能关联到空间类的属性, 还需要向下转换得到醋类的饮用巨饼。关联到醋类的属性,对醋中的空间进行操作 运行程序,这里也可以用数组锁引函数替代负循环。 整理一下, 由于前面板只有一个触控键,所以触控键的太步键选中顺序 为零,所以数组函数的所以输入端输入为空时的默认值为零,返回的正是第零个元素,也就是促供键的引用句柄。 修改一下数据,调试一下所有支付串中的数据多半修改为了 c。 如果直接将空间锯柄连接到负循环, 就能根据 vip 修改某类空间的属性。 下面修改一下程序, 按住 ctrl 键的同时拖动空间,在前面板复制一些空间, 再复制一些字符串空间。 也可以通过 ctrl 加 c 和 ctrl 加 v 这两个组合键实现空键的复制粘贴。 整理一下程序框图,清空空间数据,按住 ctrl 键的同时将空间拖动到程序框图中, 可以形成该控件的常亮。重新布局一下粗中的元素, 复制一个直属性 为触控键,构建一个程序分支,醋类的内 id 为三十,在该分支中为前面版所有触控键复制。 整理一下,选中的这部分程序代码为这个促长量复制运行程序, 可以看到前面版空间中的数据已经被批量修改。






