inav回传功能设置

粉丝2895获赞2.5万
相关视频
 02:02查看AI文稿AI文稿
02:02查看AI文稿AI文稿接下来我给大家讲一下这个脚本是怎么刷的啊?首先把 usb 插到上面,一定要开机状态下插,然后选择 sd 卡模式,然后同时打开这个文件夹,遥控器的文件夹,然后我们把这个安 iv 的文件夹解压一下, 然后提取,然后解压完成之后呢点进去之后他有两个文件夹分别放在他的根目录,先看一下他这个 sd 卡没有 w 这个这个文件夹他就可以直接放进去, 放进去之后,然后第二个是右耳,就是第二个是这个我跟你讲,然后也把它放进去,但是这这里遥控器的 sd 已经有了的话,就直接可以直接打开,然后打开把这里的东西啊 niv 的固件脚本都放进这个文件夹里面,这个这个文件夹啊 好,然后我们这个脚本就已经刷好了,然后可以断开连接, 然后的话设置的话是这样设置的,先点击最下面的按钮,选择布局,布局要选择这个全局布局这个,然后选择,然后顶栏要关掉,飞行模式关掉,滑块要关掉,微调也要关掉 啊,设置小物件的话要选择那个,选择二 niv 的这个脚本,点击他之后,然后点确认确认, 然后这这次我们加班就设置好了。
502RUSHFPV穿越机 04:30
04:30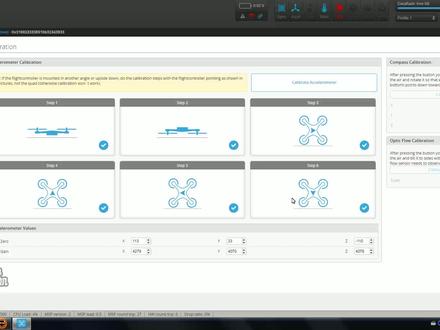 06:39查看AI文稿AI文稿
06:39查看AI文稿AI文稿这次给大家分享一下这个 inv 这个基础设置,也就是怎么能让他起飞这么一个教程,还有他的一个简单飞行测试视频, 下一个视频会给大家分享他的自动悬停和自动返航的这些功能和实测视频。好了,我们先看一下怎么让大家起飞一个基础的设置,上次说了怎么刷 inv 固件 完以后呢?我们同样连接到电脑,然后连接 i n v 的地面站,当你第一次连的时候,这个图片是一张大黑图片,这个不用关,当你设置完以后,这个图片就正常了,就是飞机的一个示意图。看一下我这个飞机的基本设置。首先第一步大家要做的是左边这个选项较准,较 滚制液呢,大家按照他这个放置的顺序,首先第一步把飞机朝上,然后机头朝前这样放, 然后点一下教准,教准完了第一步就过去了,然后再把飞机反过来放到桌子上,机头同样朝前,然后再点教准。第二步就教准完了,然后你再把飞机机头朝右,然后机身的上面朝着自己 这样放置,再点较准。第三步过去了,后面这三步也是同理,箭头是飞控方向,然后这后面三步都是机身上面朝向自己这样摆放,就这样 六步校准完以后,这页就设置完了。设置完以后我们再看第三项,这项因为我们就是默认的四轴,所以直接点这个漏的就可以了,就是加载这个名词,也就 是加载这个混控,默认的他就是四个电机,然后这些都不用关,加载完以后保存重启就可以了。大家可以仔细看一下这页的设置,这是多轴,就选这个,然后再下一项,我们看看 菲格瑞神,这个要打开,并且选你电条的协议低少的六百,我是这个协议的,这个是电机解锁大叔,大家看我设置的这个数字,根据自己的习惯去设置就可以了,这也主要是电条和电机的设置, 然后保存冲击,其他的就不用动。然后我们看预设,这页是个预设,你可以选择他这个预设,如果你设置了这个预设,他会覆盖掉你之前的这些设置,比如 p id 混控 滤波,他会覆盖这些设置。我是这样弄的,我是预设选择七寸,然后再去设置这些值,这样我弄 的理解就是基于七寸的预设,然后再根据自己的喜好去设置其他值,当然这块你也可以不用设置,设置你自己喜好的值就可以了。然后再看端口,端口和 bf 设置是一样的,打开接收机图, 服装协议, gps 这块就不多说了,再看这一页,这些主要是一些传感器的设置,比如陀螺仪,气压机,还有这些电压设置,电流设置, gps 这些东西,这 呢根据自己的这个途乐一型号去选,然后电压最低报警啊这些根据自己的去设置,电流机也是根据自己的去设置,然后如果装了 gps, gps 开启,选择你对应的这个协议。我是花国龙 m 八零 gps 就这样选择就行了,这个就选自动检测,再往下, 这是我们飞机的名字,花骨龙 f 七二迷你,然后再往下是图传,图传我习惯用 a 六频道,所以直接选 a 六就可以了,然后跑耳就是功率,功率我选择最大也就是八百毫瓦,然后保存并充气,再往下是失控保护,因为我还没设置自动返航这些功能, 所以我先选择是控上缩坠落,这个是相对比较安全的一种方式。下一页就是 p id 的设置, p id 因为我飞完以后发现飞行手感有点肉的感觉,所以我把 p 增加力量,然后 ret 也提高了一点,然后滤波,这些都是保持默认没有改动的。再看下一页,因为 这次的视频是让飞机能起飞,所以这些设置我还是保持默认的,没有动,再往下这一页同样保持默认,不用动,再往下。这就是接收机, 手机和 bf 也是一样的, ics i 通道,选择你这个对应的通道,然后接收机协议就可以选择你的协议,我是黑羊,所以我选择黑羊的 crs f, 这样接收机这页就设置完了。如果遥控打开这些条,就会根据遥控区变化线往下模式,这页跟 bf 也是很像的,我们可以看到有解锁字纹, 嗯,然后半字纹,同样的这些绿皮线啊也是这些东西,所以按照 bf 的设置方法去设置就可以了。这页暂时也不用管,保持默认。这 ps, 这页是个数据的展示, 暂时不用管这一页,因为这次不设计导航返航,所以也不用管。再往下就是 osd, 跟 bf 也是一样的,按照 bf 的设置就可以了,但是 osd 大家一定要注意一点, 一定要记得选这个字体管理,然后 flow 的这个字体,如果你没有上传字体的话,你可能会看到这些图像都是乱码的,或者就那种马赛克的感觉,如 如果你发现你有乱码和马赛克,那就在字体管理啊, polo 的这个字体就可以了,这个根据自己的喜好去调就行了,其他的我保持 默认,然后 led 这些跟 bf 也是一样的,这也就不多说了。然后这也是一个数据的展示,也不用管他,这也也是不用管。再往下就是黑盒子和 crr 命令, 这些都弄好以后,同样你要检查电机的转向,转向用 bl 软件去调正圈,这样的话我们 lnv 的这个基础设置就做完了,就可以去飞了,可以飞手动字纹,但是返航导航这个还没有设置,之后 后的视频我会再去分享返航、导航这些。 inv 的这个设置和飞行测试,我先用 用手动肥来感受一下这个固件,这种感觉会比 bf 感觉手感稍微柔一点,就是反应可能慢一点。但是 lv 这个固件它主要是针对于返航、导航这 这些功能来做的这么一个固件,所以这个固件用来远航,然后普通的这些简单的划飞动作还是完全可以满足的。然后空中切换一下字文,看看字文的感觉,字文也是飞行很正常的。 总的来说,因为艾恩威和 bf 他是两种定位的固件,所以想玩远航可以刷这个艾恩威,实现我们这些更精准的救援这些功能,还能简单的完成一些花费的动作。可以选择艾恩威这个固件,如果追求手感比较 叫极限的话费,那还是建议大家选择 bf 股价。
444Yang_FPV 08:40查看AI文稿AI文稿
08:40查看AI文稿AI文稿大家好,我是超人梦想实验室,今天这期视频呢,我们开始正式的进入安娜屋里面的四点一点零的调餐,调餐好之后我们就可以开始进行试飞了。我们先连接到地面站,大家看到第一页 第一的数据呢就是我们的飞机的一个样子,我们这个看这个样子就可以看到飞机有没有反馈正确啊这些数据。然后右边这里一些绿色的,就是自检的一些数据啊,自检还有信息,还有 gps 信息这些,这里面这里面这个作用呢,其实就是看 飞机的反馈有没有正确,就说前后左右是不是正确,就是飞控方的方向有没有错误。然后第二页呢是六面校准,这里呢我们前面已经做完了校准就不用看了。 然后第三页呢就是 mixe, 这个这个在我们前面也是做好了的,就不用再去移动了。奥特 pot 也是基本上前面设置好了就不要再做。后头呢就是一些端口的 设置,比如说二端口接那个接收机,然后三端口是 gps, 当然如果要开其他的,比如竖传啊,一些什么设备呢,就可以想添加到哪个端口,添加哪个端口自己去添加,我们后面再说吧。然后第四页就是 con figure, 这里呢就是一些也是一些基本信息样的, 比如说这里,这里就是一个啊,这个呢就是刚刚我们横滚的横放过来,转了一个九十度的方向,九那个飞空转了一个九十度方向,跟 b f 一样的,我们转一下之后再第一页看一下有没有正确啊,然后下面这是 gps, gps 的协议选择啊, 然后这些数据我们基本上选好了之后呢,基本上就是选择,主要是打开一个 gps 的一个开关来开,开来就行了,然后看到第六项,第七 第七项,这里的 fcf 就是失控保护,失控保护我们一定要选择一个 rth 返航的模式啊,一定要选择 rth 返航,返航之后呢,切按一下这个 c y 呢?瑞波特就是保存好,然后 pid tennis, 这里 pid 的一个调节,像固定的话,我们前前面是飞之前就不要去动这些数据,先不要去动这些数据,用默认数据先飞,飞了之后再进行调节,如果前期直接去调节的话,可能后面飞行会遇到 必要的麻烦啊,我们先不要去调节,我们可以调一下这里的数据,像这里前几项呢,就是横滚的一个反应速度,前面三项横滚抚养一个的一个,还有一个航向的一个反应速度。然后下面看一下,这里有两个,一个 n 者,就是 n g max, 若 n 者和 mxp n 角,这两个就是福雅和横滚的一个角度啊,可以多大角度?拐弯就这样的,如果当然你想要拐的很急的话,可以调大一点也行,比如说调到四十度就就转的转的比较快一点。转弯啊,这是两个转弯的角度, 然后没了这最下面三项,最下面三项这个呢是什么呢?是那个就说手动的一个瑞特值就相当于百分之百输出,就相当于遥控器输出多少他就有多少啊,这个都是这样的,正常的啊。然后我们看一下高级设置,这里面有个高级设置啊, 高级设置里面有些比较啊多的设置数据,我们看一下 啊,第一项菲斯维英奥特郎 cct, 这一项呢,是自动抛飞的一个设置,自动抛飞呢,我们这期视频先不讲,等到后面之后我们再去讲一个 自动刨飞的数据,然后再看下面,这是电池的一些设置的数据,然后主要最主要是我们看到这个啊, thct 就是返航的设置,返航设置非常重要哈,我们首先一个返航的高度的模式,就是说 返航是按照什么返航,是按照当前高度返航呢?还是按照我们我们的一个设置最低的高度返航呢?还是说怎么样返航啊?我们这里呢,看见没,我们看到艾特丽丝的最最少啊,最少保持这个高度返航啊, 就说我们这里设置高度呢,是 it two 的,就是高度呢,一一百米哈,一万一万厘米,看见没,大家一定要看到后面的单位,没事瞅一眼后面单位,别搞错了,一万厘米,这里呢一定要注意了,然后这里反而后面的 it two 的再加的高度,这里设置八十厘米,八十厘米就太低了,肯定炸鸡了啊,我们 设定到了个七十米,七十米就七千,设置七千,然后这里呢, clam b for 啊,贴纸返航之前要不要爬高啊,这个一定要打开来啊,一定要爬高哈,就说如果当低于一百米的时候,当前高度低于一百米的时候,如果你切了返航,他会在原地盘高来盘到高度之后,盘到一百米高度之后再开始返航,这样的话会比较安全一点哈,一定要这样哈,你这里一定要打开来, 然后下面这个 landaft before 啊, nandaftrth, 就是说返航之后要不要降落这 naval 哈,现在先设置在 nava, 因为我 我亲测过他的这个降落,我感觉跟个炸弹一样,太快的速度就下来了啊,就像推着油门滑,直接到地上来,以一定的角度就直接滑地上来了,太危险了啊,我们所所以我们 我们先设置那个,然后这下面是 mingrtxdc 的最低的啊,最小的返航的距离就是五米啊,我设置五米比较,然后我们记得一定要保存,像这里刚刚设置了一下,改的一下七十米的高度,保存一下,卸服一下,卸服下我们再打开 啊,等待一下,等待一下重启啊,重启之后呢,基本上这边的返航的设置呢,基本就设置数据,然后这下这一页就是接收机, 尤其我们这边连上了之后呢,就不用去动的模式。模式我们看见开的什么模式啊?我这边看着看着模式,看见没?大家我看一下,首先一个解锁模式,五通道解锁,然后六通道一个安九啊,然后控制,再控制一个手动,然后一个返航,三个模式,三个 模式,然后这里呢七通道呢控制一个,一个一个,第一个是全空,第二个呢是,然后最后的就是定高,定高飞行,然后再看下一页,下一页这里呢就是一些其他的数据,我们也不动,他在下面就是 gps, gps 的设置,当然 gps 如果连接正确的话,这上面就会显示一个绿色的标,如果错误的话就是红色的啊,可以看到绿色的正确的。现在大家可以看到有有数据在动荡啊,说明证据,这些数据插上去,数据是有,只是说没搜到心而已,数据有正确的,然后再下一页就是 迷失。空调就是地面,地面那样飞行的一些模式,要接树船这些东西接回来,看到一些数据,这边我们先不接,然后 osd 的设置, osd 的设置呢,其实比较按照我的习惯哈,我是比较设置的,比较 是比较简洁的一点的,就是说看见没,这上面,这上面两个数据,第一个是遥控信号, gps 信号模式,然后这边一个飞行的一个电压,电流和耗电量,然后飞行名称,然后这里一个航向角, 然后这边呢一个速度跟一个油门值,速度跟油门值是放在一起的,就相当于给多少油门,你给了多少油门,他有个多少速度,大家有个数,然后右边这里呢是个高度,然后在这边呢就是一些 啊,怎么说呢,这是一个飞行时间,一个离家距离,一个总航程,然后这里一个飞行的一个信息提示信息,还有一个 啊,这里呢是进纬度啊,我们对着对着屏幕,对着小飞手屏幕直接去调,因为调摁一下上去之后,他马上就会显示出来了,马上就会在我们的 啊,屏幕上显示出来就比较快一点,看到效果我们再玩这个再上一格子吧。 好了,现在数据呢,大家可以看到 osd 里面的数据已经调完了,跟那个屏幕上差不多,大家可以看到没有,就这样的一个数据调调成这样了,已经还是可以的。进纬度这些数据都有了,然后我们 我们再给他,哎,更新字体也可以啊,这里有个更新字体啊,如果觉得这个字的字的不好看,太小了或者怎么样,我们可以直接更新字体啊,这里选择自己字体之后, 选择好字体之后想选哪一个?这么多字体,我们选哪个?点一下更新字体就是了啊,然后这边设置好之后呢,记得保存一下啊,我们也保存一下啊,保存好了 之后呢,基本上设置就可以了,基本上设置就是这样的,我们现在的话基本上已经设置完了,就可以起进入一个起飞的状态了啊,然后我们等下就去进行一轮试飞,看一下飞行的效果怎么样。非常感谢大家收看,我们下期再见,看看一下数据。
 03:00查看AI文稿AI文稿
03:00查看AI文稿AI文稿大家好,我是 k z, 欢迎回来,接下来介绍 i n a v 里面定高飞行模式它的几个重要的 参数。定高飞行大家知道油门控制的不再是直接的动力输出,而是他的爬升率或者下降率,是在高级设置里面,这边 上面一个就是他的最大的定高模式下的爬升率,他的单位呢是米每秒, 默认二两米每秒,意思就是在定高模式下,我油门给到最大,飞机以两米每秒的速度向上升,这是一个匀速的,那如果我油门回中, 那么他就是保持高度,他就变成了零米每秒,如果我往下拉到底,那他就是以两米每秒的速度往下降,我打百分之七十五的油门,那么他可能爬胜率就是一米每秒。 接下来来讲一个很关键的问题,因为我们的很多遥控器啊,他不是回中杆,不是回中油门,是不是 啊?我们的油门中间是不是很精准的,我们每次要把它定在终点,让他悬停,很难很难,所以在这个油门中值来控制定高的时候,我们需要有一个 油门的死区,那么这个值呢?在页面上面暂时是没有的,我们需要来到命令行模式里面,我们来看一下啊 band 死去好,我们就可以看到里面有一个叫做 art hold deadband, 默认是五十,那么这个五十呢,就应该是正负五十, 也就是说那么他在一四五零和一五五零之间,你轻轻的去动,他是可以忽略不计的。那么如果一些新手或者一些青少年的时候手比较燥,或者呃比较控制比较粗糙的话,我们还可以把这个值去抬高, ctrl c、 ctrl v 前面加一个 set, 我们现在要把它设置到七十啊,回车,然后再 sav 保存啊退出,它就变成了百分之七十,那么 这个就是定高时候油门的死区,终点的死区。那么关于定高的油门有有两个选项,是这个和这个 一个开关一个竖直,那么当我们打开这个开关的时候,他就默认把绝对的中指油门当做我们定高控制器的零点或者居中点,或者是定高点。这有个什么问题呢?比如说我们的。
228星辰大海KZ 07:08查看AI文稿AI文稿
07:08查看AI文稿AI文稿嗨,大家好,我是 kz, 我又回来了。那么之所以这个教程停更了那么久呢,是因为我们原来那架飞机啊,被我炸了一下,然后虽然看上去机架是很完整的, 但是他其实机壁已经软了,所以轻轻一推油他就抖。今天呢,我们又换了一个机身,呃,因为要 测他的定点吗,所以我们换了一个比较硬的机身,就是呃,掰都掰不动的这种榫卯结构的框机,他很硬,这个里面非常的硬,我们还是要注意一下他的这个重心的,我们希望他的重心啊,尽量靠中间, 尽量靠中间,所以我们要稍微调整一下下重心。好, 哎,这样就差不多了啊,这样就差不多了, 好,下面我们来看这个 osd 的画面啊,因为我们前面设置了 osd 啊,所以现在它的作用 就显示出来了,现在你看他是 amble to arm, 就是不能解锁,原因是什么呢?原因是 aircraft is not a level, 不是水平的啊,我把它放水平, 他就会滴滴滴叫了。我们虽然在家里面已经做过多次的这个磁罗盘的校准了,但是我建议大家每换一个地方,来到一个新的场地 第一块垫之前呢,还是要做一下机身的磁罗盘或者指南针的一个校准。那么这个校准 有一个非常快捷的方式,大家不需要再重新连接地面站,连接电脑。好,我们现在拿着遥控器啊,我们飞机现在是上电的,是吧?大家一定要注意安全,不要打到解锁啊,不要打到解锁,然后我们来看一下遥控器的手势,应该是 啊,油门这边最高,方向最右,然后抚养往下拉一下, 这个时候他就会显示什么 compass, multiplay, 就是磁罗盘没有叫准。那这个时候呢,那我们有三十秒的时间,和在地面站上一样,来做一个 围绕三个轴的这种滚转的校准,这是三十秒的计时,是系统自动的, 如果时间没到,大家可以多做几圈都没有问题。好,听到这个声音 就说明已经较重好了啊,屏幕上也是没有了那行字,那这个时候我们就能够正式起飞了。那么第一次起飞呢,大家还是要注意这个环境,尽量选择比较空旷的,平坦的,视线比较好的地方。好,然后我们把飞机放在地面上, 尽量放水平,现在你看他的警告又变成了抓到 is not low, 油门不在最低,那我们把油门拉到最低, 他所有的警告全部消失,这个时候我们才可以正常的起飞。那么我们之前在地面站上设置的那么多模式呢,在不同的开关上大, 一定要熟记,那么这里呢,这边是解锁,这边是三个基本模式啊,打到下面是手动,中间自稳,最上面是定高, 这个是定点模式,这个是反毫模式,所以大家一定要熟记在心。然后第一次起飞呢,我建议会飞手动模式的,你呢最好还是飞一下手动模式,就像这样子打到最低,我们只要打解锁, 飞机就自动启动了,螺旋桨就应该有个怠速了,是吧?好,我们先来手动飞一下, 那么你如果会飞 fpp 呢?你也可以简单的飞一下,看一下这个飞机有没有什么大的问题,大的问题我们可以简单的飞一飞,然后我们尽量让他悬停,眼睛看好飞机, 这个时候呢,我们先要再看一下左右都没有人,对吧?好,然后我们来给他切一个定高,就是这样子切上去啊,那这个时候他高度就定住了,是吧? 然后他的角度的操作逻辑是自稳的逻辑啊,是自稳的逻辑,他是定高的,那么我定高的时候油门松掉,他是会随风飘的啊,只是他的高度不会那么明显的变化,他会飘过来,是吧?所以我们 一定要有这个心理准备,他会飘过来。好,这个时候我们再测一下定点模式,定点模式是这样,我定高不需要去动 一掰定点啊,飞机就应该停在空中了。那如果这个时候,呃,如果这个时候飞机不停的画圈,不停的在原地画圈呢?说明你的磁罗盘 没有叫准。好,那如果这个时候飞机飞,但是在画圈他还朝着一个方向啊,义无反顾的飞去,那说明 这个时候你的磁罗盘的位置设置就是在地面站里的那些角度的设置有问题,好吧?好,那么这个就是定点模式,那么定点模式的高度的控制的逻辑也是和定高模式一样的啊啊,油门之中他就 不动了,油门之中他就不动了。那么最后呢,我们再来测试一下他的自动返航功能怎么样?我们先把飞机飞远 看一下屏幕 啊,我们可以通过屏幕上离家 他的距离就是这边一百多米啊,一百多米的距离,我们来看一下。 好,然后我们就给他切一个返航模式,那返航模式也是可以在任何的模式下切返航, 这个时候注意他会显示 rth, 就是腾出后模式,然后正在进入回家的路径啊,正在进入这个回家的路径,然后飞机在我们上面回来了,再慢慢的回来, 会掉头把,重新把尾巴对着我们,然后以设置好的这个下降率啊那些东西再定点。那么如果你在第一次起呃是非的 时候发现他没有往家的方向来,或者越飞越远,那么你赶快把定点模式把,赶快把返航模式要取消啊,然后重新掌握控制权。 好的,那么首次户外的功能的是非视频呢?就给大家介绍到这边,再见。我是新城无人机的 kz, 下期再见。
199星辰大海KZ














猜你喜欢
- 2.0万婷姐
最新视频
- 1.4万基地