机器人爱心轨迹是怎么操作的

粉丝3.1万获赞9.2万
相关视频
 02:21查看AI文稿AI文稿
02:21查看AI文稿AI文稿首先我们新建一个空空作战,导入机器人本体以及相关工具,机器人型号根据实际情况选择即可。 然后将工具安装到机器人上,紧接着创建系统,系统存储录制可自行选择名称号码可修改 编辑完成。修改语言,这里的语言需要选择中文,需要选择中文,等待系统创建完成。接下来就是将系统与 map 同步,加挑勾即可同步完成。打开试照器, 这里需要先切换到手动模式,选择相应工具坐标, 创建需要的编程模块, 将来后的模块新建立行呈现, 切换相应作标线,让机器人运行到相应位置,通过鼠标点击方向键模拟控制机器人移动。 接下来就是目的,还有目标指定的使用, 千万别忘了修改位置, 觉得有用记得点赞关注加收藏,下期见哦!
3104编程自动化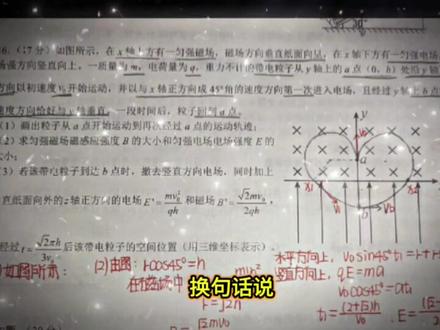 00:10查看AI文稿AI文稿
00:10查看AI文稿AI文稿洛伦兹力永不做功,画出新型轨迹得需要电场的参与,换句话说,他对你不来电的话,也不会出现小爱心。
71高校之星 00:17查看AI文稿AI文稿
00:17查看AI文稿AI文稿这个版本融合了抓球加投球,利用超声传感器检测距离,调节力度和角度, 要爆了。
113路政先锋张益达 00:53查看AI文稿AI文稿
00:53查看AI文稿AI文稿欢迎收看机器人数据采集员的日常,到公司的第一件事上设备,这就是捕捉真人动作的秘密武器。分别在手部、腿部、 腰背部等部位穿戴好相应设备,其附着的惯性传感器并会采集我对应关节的运动轨迹与数据,并实时以三 d 动作模型呈现。通过其动作数据记录功能,我的动作会以 md 文件格式导出。 接下来只需要把数据导入这个转换平台,就能一键映射到机器人模型上。要是有动作不到位的地方,还可以通过编辑模式进行手动修正。再结合机器人下肢运动控制算法,机器人就能轻松复刻我的动作,就像这样。
 01:45查看AI文稿AI文稿
01:45查看AI文稿AI文稿今天给大家介绍的是超级轨迹比赛,它是教育局白名单赛事世界机器人大赛、青少年机器人设计大赛下的 super ai 赛项,由中国电子学会主办,分为 初级、中级等赛道,面向的呢是中小学生。它的比赛形式以巡线为核心,结合着星际探索等趣味主题, 选手提前搭建现场进行编程,在指定的赛道自主识别轨迹,完成任务与竞速,兼具着含金量与可玩性。接下来老师用后面的地图给大家演示一下寻线功能, 接下来给大家演示一下,按一下开关,好点击运行, 先执行打卡,然后我们进行旋转,注意不要脱线啊。现在我们一直寻的是白线,好不断的进行判断,好换线,此时寻线寻的是黑线 还是要做判断,此时我们需要让它往右转, 每次进行判断时,我们电梯都会发出一个声音, 好,黑线寻完了再次换线寻白线,这个时候我们把速度稍微调的慢一些,以免判断的时候呢出现失误, 好即将到达终点。
5一根贤玉













