基础工业计划模拟空间中融

粉丝24获赞417
相关视频
 02:05查看AI文稿AI文稿
02:05查看AI文稿AI文稿各位家长们,提起强击计划,很多人可能只想到埋头苦学书本知识,但其实学习模拟飞行对强击计划有着意想不到的好处。先来说说提升科学素养方面。模拟飞行涉及到大量的物理知识,比如 飞机飞行时的空气动力学原理,就像鸟儿在空中翱翔,要克服重力和空气阻力,这就和咱们物理课上学到的历学知识紧密相关。 通过模拟飞行,你能更直观的理解这些知识,不再是死记硬背那些公式,就好比原来公式只是纸上的数字,学了模拟飞行后,他们就变成了飞机在空中的各种姿态和动作, 是不是一下子就鲜活起来了?再看看培养逻辑思维能力。在模拟飞行中,你要时刻根据不同的情况做出决策, 比如遇到气流变化、航线调整等,这就像下棋一样,每一步都要深思熟虑,考虑各种因素之间的关系。这种逻辑思维能力在强积计划的学习和考试中可是非常重要的, 它能帮助你更好的分析问题,解决问题。还有空间感知能力,在模拟飞行里,你要 切三维空间中的位置和方向,这能极大的锻炼你的空间感知能力。而在强基计划涉及的很多学科,像数学、物理中的立体几何 物理等,都需要有良好的空间感知能力。另外,学习模拟飞行还能培养你的专注力和耐心, 飞行过程中容不得半点马虎,一个小失误就可能导致飞行失败,所以你必须高度集中注意力,并且要有耐心去应对各种复杂的情况。学习模拟飞行能从多个方面助力强击计划,让你的学习之路更加顺畅。
 58:01查看AI文稿AI文稿
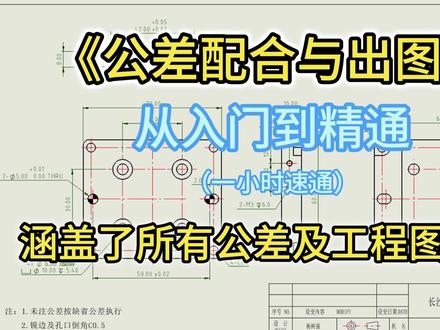
58:01查看AI文稿AI文稿如何逼自己一小时学会公差配合与出图?存下吧,这比刷剧还爽!本视频耗时一个月制作,共计五十九分钟,带你一口气学会公差配合与出图!真正零基础入行机械 含盖了所有公差与配合知识,其中包括误差与公差、互换性与标准三种公差配合,公差配合的选择、机准制几何公差位助公差、常用技术要求和常用配合讲解等等。为了让零基础的小伙伴学起来没有负担,我还准备了学习路线以及视频,全套学习资料,对新手小白都超级友好, 评论六六六即可全部带走。接下来开始正式的学习。首先第一个是什么设计意图,第二个呢是公差的意义以及概数。这个章节里面呢,我们可能包含了有各种各样的公差意义,比如说基本形状公差,基本位置,公差配合啊,我们三种配合全部要讲到位, 并且呢,表面粗糙度,典型零部件,我到后面呢,甚至还会讲一些工程图的案例。那么我们第一节课呢,就是关于什么是设计意图,你们知道工程图是什么东西吗?对于要转行的,要从事机械行业的同学们,你们知道工程图是什么东西吗?对于要转行的,要告诉你们就是 工程图的意图是什么,他的意义是什么?其实说白了,就是要把你的设计的一些重点项要准确的表达给我们的这个机加工以及安装调试人员, 明白吗?而不是说,哎,有,总是有东西说我有三 d 模型了对吧?有了这个三 d 模型,我直接扔给他,让他去看模型不就完事了吗?不是这样子的,因为有些地方的加工我们可能会有一些微调,其实我们所谓的配合,所谓的这些标注行为公差都是要进行一些微调和以及约束的。 而且工程图不仅仅是给机加工看的,还有给检测部门看的,所以我们要尽可能做到三合一。哪三合一呢?设计 加工和检测我们所所有的部分全部遵循这个工程图的一切标准,遵循这个标准以后,我们才能够保证我们的机械设备装上去以后能够达到我们想要的效果,而不是说装上去 精度,精度没有工差,工差稀烂,对吧?甚至装上去以后呢,工艺工艺达不到,设备呢?直接成为一个失败的案例。所以重点就在于你的设计意图。那么设计意图有哪些东西呢?首先第一个像尺寸,这就不用说了,准确的去描述我们这个零部件啊,他长得什么样子,对吧?但是除了尺寸以外,他不够啊,对吧?他完全不够, 因为在这种情况下面,有些地方我们要谨慎对待,说人话要谨慎对待,某些地方我们要认真的加工,比如说鱼孔配盐这个地方看到了吗? 那这个东西的话,你就没有办法说我这跟机加工准确描述,哎,我这个地方要配研,其实所谓的配研什么意思呢?就这根轴加工出来以后,这是一根轴啊,传统轴加工好了以后,他要跟孔去配合,但是你光靠机加工出来的成品是没有办法保证完全和孔完美配合的, 完美是做不到的。那么也就是说这根轴我们在加工的时候需要在现场啊,进行微调啊,什么叫微调呢?我们就磨一磨,铲一铲啊,我们以前这个机床的硬轨上面有一个刮研的工艺,类似于那种, 对吧?纯手工工艺。然后呢,要求是接触面积百分之八十五,那也就是说我们要完美的贴合,至少要百分之八十五的面积是贴合到我那个孔上面去的,看到了吗?这就是要求,那么装配也列入其中,其实严格来说算四合一了,设计、装配机加工和那个检测,对吧?一一条龙服务,就是这一点,所以我们现在补充到北京里面来啊。工程图的目的是什么? 目的是什么对吧?目的是什么?是要传递你的设计意图,首先第一步是要给到我的机加工部分啊,你机加工的看不懂的话,那我说实话,你这图也算是白出了对吧?白看了 对不对?然后呢,为了完成这个目的,其实我们的核心是什么啊?我这里就直接复制了啊,之前有粉丝说打字太影响了,所以我提前打好,打好了以后呢,我直接往上复制啊。我们的核心是什么?核心就在于我们要准确、清晰、方便的后续工艺啊。后续工艺? 后续工艺?哪些工艺啊?去加工对吧?呃,质检、安装、调试等等等等, 所以要懂啊,我们是设计师,我当然懂这个东西怎么装,但是其他的工位他不懂啊,他不懂的话就意味着我们这个项目就进行不下去。你有没有想过一个问题,为什么你的项目总是不断的打电话?哎呀,为什么这个东西搞不定啊,怎么样啊 你很有可能就是你的工程图没有出到标准好。什么是标准?标准其实有很多,我们现在右边看到的这个是国标的图纸啊,国标的图纸就是最正儿八经的,我们全中国都在实行的这个标准,这些图纸的案例各种各样的零件都有,然后呢,如果想要的同学的话呢,可以评论区发六六六,我挨个安排发给大家啊,去参考参考。不懂工程图的同学们呢,多看一看 好不好?但是你要知道这玩意的话,它不仅有标准的优先执行的标准是什么?我先我知道我接下来讲的这个东西会不会被骂啊?首先第一个有国标对不对?但是你要知道现在随着数控机床的这个发展,其实很多国标的标注他可以简化,明白吗?他不用搞得那么麻烦 知道吗?所以其实国标不一定是你优先执行的标准,确切的讲是你在座的各位马上要找工作,不管你到哪家公司优先执行的标准,那就另说, 明白吗? ok 吗?所以这就是我们在说设计意图的意义,以及我们为什么要去遵循这个国标,原因就在这里。而且最核心的一个点是什么?就是要求所有人都必须要用一个标准,就是一个企业里面啊,我见过很多的学员,他在他的公司里面一个小组五个人三套标准,那这种情况下是绝对不允许的,至少你要做到小规模的统一, 小规模统一,然后这样的话你的技加工才能够针对你这个项目,然后呢来进行针对性的这些理解,而不是说你今天第一张图纸长这样,明天一张图纸长那样,那就完犊子。所以还是那句话,你可以不遵循国标,但是你必须要遵循一个标,一定的标准,而且要准确无误、清晰方便,这些东西全部都要满足,明白了吗? 这就是我们说工程图的设计意图。好的,这节课我们先讲到这下节课来讲一讲公差的意义,以及它到底要怎么去制定 好的。那么什么是公差呢?其实公差你要知道在完美,在现实世界里面,现实世界里不存在完美的物体。什么叫完美的物体?比如说我要求啊,要求,比如说某个尺寸,某个立方体啊,某个立方体尺寸为十毫米乘以十毫米 乘以十毫米乘以十毫米乘以十毫米,对吧?一个这样立方体,但是这个立方体他真的能做到刚好吗?做不到,很有可能他有可能他的尺寸会可能在,比如说我们经常讲的十毫米,正负零点一毫米,这句话是什么意思?就是他的边长有可能是十点一毫米, 然后呢?也有可能是九点九毫米,当然他有没有可能刚好是十呢?有,这个概率非常非常低。为什么?因为在这个范围内啊,他的存在的意义在于,他很有可能,比如说十点零五呢, 对吧?比如说十点零一呢,对吧?比如说九点九九呢?等等等等,他都有可能。所以我们加工出来的时候就要给他一个范围,而不是给他一个确定值。你给他确定值,他是根本不可能做到的,你要给他一个合理的范围,就比如说你考试一样,对吧?我要求你这次考试考九十八分,不能多不能少,你能做到吗?你除非是特别容易, 不然的话这个难度其实非常非常大,对不对?很有可能,所以我们要给他一个合理的范围。所以我们公差的意义是什么 来?公差的意义就是我们被允许的,所以公差的意义是什么?公差的意义就是被允许的各种尺寸的波动范围。在这个范围呢?因为物质世界没有绝对的正确, 就像我们我们的人一样,人都是有阴暗两阴叫什么?光明和阴暗两面的,对吧?一个道理,对吧?零件一定会有偏差,而且这些偏差不一定是来自于我们的机加工,当然机加工一定会有,比如说我的机加工的机床可能,呃,铰合有问题,或者是精度有问题,那么机加工的偏差就一定会把这个尺寸带带偏, 对吧?然后除了机加工解决好了以后,那么我们后面可能还有比如说我们的零部件的受力释放,那受力释放也是一个问题啊,对吧?有些铸造的或者是锻造的原材料,你加工完了以后,我靠他很有可能会导致时间久了以后,他开始轻微的变形,这个变形不大, 对吧?他很有可能从零点九、九点九九一路给你变形到了十点零五,这是合理的吧,对吧?为什么合理?因为我给他这个范围了,对吧?包括还有温度变化,温度变化也是一样,尤其是那种我们经常讲几个 miui, 几个 miui 的 公差,几个 miui 的 公差的话,你这个零件基本上保存都需要恒温恒湿,温度稍微变化一下,他基本上就挂了, 对吧?还有最重要的一点,我们在做非标准化设备项目的时候,经常还有运输过程,我说的难听一点,几个 miui 的 零件,你那个用个货车去做输送, 你基本上过个减速带,它那个公差就变了,知道吗?还包括使用的时候,对吧?所以它使用的时间越来越长,那么对应的它的公差一样的,它也会有变形,所以我们允许有偏差,但是必须要在我的设计范围内,我不能说你失控,明白吗?我不允许它失控,这个是我们不能接受的,所以我们需要考虑公差,那么公差从哪来呢?这又是另外一个问题了, 从哪来?同学们,想一下,来安装需求、使用需求,还有按照加工需求,我们都可以来。首先第一个安装和使用的话,其实我们以使用为节点,就是比如说这个地方我精度很高,为什么高? 因为我这个地方我有定位要求,我的产品精度有这么高,所以我的零部件要求这么高,这是非常正常的。当然你也得参考这个加工能力,你加工能力做不到,那怎么办呢? 对吧?加工能力如果做不到的话,那么也就意味着你的这一套工差基本上标上就是假的,你的基层做不到啊,你的加工能力也做不到,那你这个图纸发出去就是假的,明白了吗? 所以我们可以有偏差,我们要根据要求,然后按照加工能力来制定这些工差,其实相对来说说上去复杂非常非常简单,明白吗?就比如说我们的呢?像这种什么气缸套,对吧?为什么同轴度?因为这个地方他有安装需求,没有安装需求,为什么要标同轴度, 对不对?然后再包括我再找个轴来,这种齿轮轴呐?啊?传统轴,看到吗?传统轴,你会发现在这个地方他有明显的公差呢,有几种 b, 有 几种 a, 然后还有同轴度要求。那为什么呢?为什么这边不标同轴度呢?原因很简单,这个地方要装轴承呀,同学们, 这个地方是装轴承的呀,所以如果你的同轴度不足,这两个台阶有偏差,他往下面沉一点点,他往上面沉一点,我轴承就装不上去了,明白吗?这就是为什么我们要标注公差的原因。 所以我始终觉得每一个机械工程师都应该要去明白这套逻辑,为什么要这么去标注?原因在哪里,对吧?你不能说我出图的时候迷迷糊糊啊,瞎标,对吧?那不可以这样子。 所以我知道很多同学们在工工作中的时候,根本就不知道这些东西的意义是什么,只是说我看到别人标了,我就这么标,对吧?比如说这里同轴度,我们刚才讲过的同轴度为什么要标?因为这里要装轴承啊,为什么这边不标?因为这边不装轴承啊,就是这么简单呀,为什么这个地方的表面粗糙度需要 r a 一 点六啊?因为它光滑,它和轴承之间是过盈配合呀, 对吧?那为什么这里是六点三?因为不装东西,所以我无所谓啊,这就是工程图里面各种表达因素的含义,而不是说迷迷糊糊乱搞明白吗? 好,所以接下来的课程里面,我们将讲明白精度等级的定义,以及所有的行为公差的含义是什么。好了,这节课我们先讲到这,下节课开始讲核心内容了。 哈喽,大家好,我是大树。那么这节课呢,跟大家讲一讲关于精度等级和机加工能力判定。你是不是在出图的时候,总会面临一个问题,这个公差我可能知道要标公差,但是我不知道标多少,对吧?比如说这里有一个反五十正正零点零三负零,那么这个数值是从哪里来的,对吧?而且我们总是会看到有一个数值,我们说无脑 g 七 h 六,对吧?那你有没有想过一个问题,就是这里面的七和六是什么意思?为什么我们在公差配合里面它会出现这样的数字?那么我们今天来讲一讲。 首先啊,我们上节课呢,可能讲过很多时候呢,你可能会要遵循一些什么企业标准呢,对吧?但是加工等级这回事啊,我们必须是遵循国标,没有哪个企业可以去重新定义这个加工等级。那么也就是说呢,所有的加工精度等级都遵循国标,那么国标是什么呢? 那这个就是国标,它有一个标准的公差等级啊,当然呢,这是老国标,我还有新国标标准,光等级的话呢,它会有 it it 一 it 二 it 三 it 四 it 五,一路下去一直到 it 一 十八,对吧?这里的话呢,是一十八个等级,其实它有二十个,为什么?因为它有 it 零,还有 it 零一, 对吧?那么不同的加工等级代表着不同的加工能力,在这里要跟正大家一个基本的误解是什么呢?就是大家都会觉得啊,我这个偏差,比如说正负零点零二这个东西我是可以用到所有的零件上面去的,对吧?不是的,我们要跟正第一个零件是什么呢?就是相同加工 精度等级的加工工艺啊,零件尺寸越大意味着这个 偏差越大,明白吗?跟尺寸是有直接关系的,同学们看到了吗?那这边是工程尺寸,比如说我有一块三百毫米的板,对吧?三百毫米板,那它的范围就在二百五到三百一十五范围内,那么如果我使用七级加工精度,那么它的偏差就是三十二个 miu, 明白吗?这就是他的这个偏差的一个值,当然这个偏差放在行为公差里面又有另外的理解,这个我们后面再说,但是至少我们在某种意义上来讲的话,我们的精度等级是固定的,而根据尺寸的不同导致我们偏差的不同,所以这里面的六和七是什么意思呢?指的是六级精度差,精度啊,数字代表公差等级, 怎么样,明白吗?公差等级,而这个公差等级其实就跟我们在选型选择公差等级的时候要各种去考虑,我要满足我的需求,满足我的机械设备的正常运行,满足我的定位精度,并且我还能够保证什么呢?要保证它能加工出来,那如果加工不出来不是开玩笑吗?对不对? 所以我们就要基本去了解哪些东西是我们能够加工出来的,对吧?哪些是加工不出来的。所以呢,我很多时候在这个企业里面看到一些很多工程师的图纸,就是四米长的尺寸,四米啊,兄弟们,四千毫米,比这极限还要大了,他标零点零零五啊, 零点零零五毫米的偏差呀,我的天呐,这行为工程标的怎么做的到呢?我算过了, it 二,大家可能对 it 二没有什么概念,就是你一般的磨床是做不到的,你可能要上那种研发级的那种母床的磨床才可能能做到, it 二,明白吗?所以我们要一定要了解机加工有哪些加工能力。 来,我们现在打开一个资料啊,如果需要资料同学呢?呃,免费的啊,啊,需要资料同学呢?不要米啊,关注我评论区留言,六六六啊,我挨个来安排啊,这份资料啊,已经准备好了,看到没有,有配合的选用,有公差的选用,那么我们这几个重点讲的就是公差等级,这个等级呢,大家看一下,我们按级来算, 对吧? it 多少?而前面讲过还有 it 零一和 it 零,为什么会出现这个呢?其实就是因为当时制定这一套标准的时候,他那个加工能力不足啊,就我们说科技没有发展到那个地步,所以他就一二三四五六七八,后来发现超越了之前的标准,所以他也能新出了 it 零和 it 零一,所以这俩基本上不太管。说实话,我们常用的加工方式要哪些呢?车 对吧?车的话呢,它基本上大家可以看到它有横杠的一二三四五,代表的是七八九十十一, 对吧?十一级,那也就是说常用在这个范围内,那为什么我加个红框把六框进去了呢?这是因为现代的数控机床的机加工精度呢,其实是很 ok 的, 绝大部分车床呢,都能够咬咬牙,能够做到六级加工精度,所以我把它框进去了, 明白吗?我把它框进去了,包括洗床也是一样,相对来说,洗床的加工难度要比车床的话呢,要难一些,它精度没有那么高,所以的话呢,它传统的洗床,手摇洗床的精度呢,是八九十十一,而我们现在数控洗以后呢,基本上能够做到七级加工精度,如果是 cnc 复合洗的话,也能够干到一路六级, 明白吗?而我们要求高精度,零件精度要求偏高,对吧?平面度啊,垂直度这种都很高的要求的时候,我们就会上磨床,平面磨床, 那众所周知,磨床一般来说都是高精度加工的,那不用说,对吧?所以呢,他本来的首要磨床是一是五六七八级, 而我们现在基本上磨床精度越来越高以后,哎,能够做到四级了啊,这个的确是可以的,当然对应的这些等级是他能够做到的地步,那么不代表所有的机能都能够做到,你也得看这个机床它的精度,它的成本, 你这这机床上他可能卖的贵一点,对吧?国外进口的啊,是吧?但是呢,也有可能你买个二手的机床,精度没那么高,但是便宜一些,所以机械设计工程师就一定要去懂这些东西是什么呢?我知道我的加工能力是多少,然后我再去定义,而不是我无脑给你定四级定五级,那我可能根本就做不出来, 因为精度越高,那么他的偏差范围会越小,那么他的尺寸就会越精准,而这样的精准往往是需要付出很大的代价的,所以机械工程师不需要去所有的零部件,我们都做高精度加工,确实是没有这个必要, 明白吗?这个东西是实话实说,真的没有这个必要,我们只在关键的地方做关键的事情,在关键的地方我们会去有说他的这个 精度要拉的稍微高一点点,我可能需要特殊关照一下,把这个机加工的能力要提升起来,或者是我要送到特殊的加工机床上面去加工啊,这个是 ok 的, 但是这就不代表说我们所有的零件,它所有的尺寸它都得这样加工,它不是这样子的, 明白吗?所以这就是机械设计里面我们说公差等级的重要性,你必须要足够的了解,这张表大家一定要收好, ok 吧? 好,那么有同学可能会说了,那我怎么能够确保我的设备能用,对吧?为什么呢?因为你看我这样的一个魔窗,那假如说我现在设备我通过尺寸链的计算,哦,我还没有讲过尺寸链,对不对?没关系,后面更新的视频我会来讲尺寸链的累计计算,累计偏差的计算非常简单。 那么在这里我先讲,我算出来之后,我发现我需要这个零件的加工精度达到二级了,怎么办,对吧?怎么办?那么我们其实有很多的手法,你就不要去死磕这个零件精度了,明白吗?如果作为一个工程师,天天说这个加工精度高,加工精度高,其实在我眼里他是不称职的,我们应该是要利用 利用,没那么高的精度啊,完成高精度的要求,明白吗?这才是我们结构设计师、机械设计工程师要做的事情我们要动脑子,所以有很多的方法,比如说我们的现场装配,对吧?现场装配打表微调, 对吧?可以这样做呀,那你计加工,我没办法保证这么高的精度。没关系啊,我在现场去打表微调,然后配孔打削子呀,对吧?这是第一个吧,然后还有第二个,我们可以通过数控的手段, 对吧?电控嘛,应该叫电控啊,电控的手段来解决,对吧?比如说什么光山尺啊,视觉系统啊,对吧?激光啊这一类的检测设备做成全闭环控制是实现高精度的, 这个定位定位需求也可以啊。然后其实觉得我觉得前面两个都是没有太多的,呃,对于机械工程师来讲没什么技术含量的,那基本上呢?第二个是电气工程师干的活,第一个是装配工干的活,那么第三个是什么?比如说我如果累计工差太多了,要求所有的零件要求到二级加工精度了,怎么办?二次定位啊, 二次定位机构啊,那我就把我累计的东西一次性给你清零了,重新定位啊,对吧?我所以我们经常可以在橱窗上面看到各种什么顶升机构啊, 顶升机构,还有比如说我们的假井机构,对吧?这些机构是没有办法的,你不这样去定位的话,那我根本就做不到这么高的精度,明白吗?这就是我们说的你不要去死磕,我们能够做到的,常规范围有就在这了, 我们的飞镖自动化设备其实比你想象中要更加的简单,大家都说是堆积木,所以尽可能的去压低它的加工成本,设计成本,而不是死磕。完了完了,怎么办啊?我要个二级加工精度,我是不是要去哪里哪里的实验室,去借一台什么样的机床去加工这样的零件,对吧?一个零件加工费五万,怎么可能嘛,对不对?所以这才是机械工程师的精髓, 明白了吗?好的,这节课呢,我们先讲到这啊,对于我们的这些工程师的精髓,明白了吗?好的,这节课呢,我们先讲到评论区留言,六六六,我挨个安排 好了,我们这节课呢,来讲一讲直线度和平面度。其实什么是直线度呢?你要知道,我们在这个三维模型里面,其实一般直线度呢,指的是某些棱角或者是边线, 对吧?那么他在工程图制图的这个定义上面的话呢?来啊,直线度是这样子的,来,来个图啊,看嘛,就是我们说这条线段,那么呢,他在一个约定的范围内,那么这个约定的范围一般来说呢,分很多种形式,首先我们现在这里展示的呢,是其中的两种啊,一种吧,就算一种啊, 就是一条直线。然后呢,我们给他一个范围,注意了,我们所有的行为公差,我们都是在空间上给他范围,而不是随着他的是什么变化呀,这些东西去搞什么等距线,而是一个理想的线段里面,那么他的这个波动的范围怎么样?我说直线度,比如说零点一的直线度,对吧?那么这个 t 就是 我们指的 零点一,而这个零点一的话呢,也就是说我们的上边线到下边线的范围是零点一毫米,明白吧?啊?这样一般来说直线度我们会用到什么地方来,大家看一下来,比如说这里个安导轨安装,对吧?我们导轨隐藏掉啊,你看在这个边边上啊,边线上,对吧?那么我们大家都知道啊,我们这个导轨的安装的话呢,它是要通过这个靠边去定位的, 对吧?如果是有靠边的话啊,这里应该是有靠边的,那有靠边,通过这条靠边去定位,所以这条靠边我们其实可以给他直线度,那会有一个什么样的形式呢?比如说波浪型, 明白吗?波浪形其实直线度的使用的话呢,更多的我们用在轴体上面会居多,对吧?当然轮廓上面呢,先讲啊,我们先讲轮廓上,这是我们的一个抽象的一个直线度,那么对应的呢,事实上呢,在做这种轮廓线的时候看到吗? 那也就是说他指的是这个顶面的这一条轮廓线,在我们当前仕途的情况下面,他的直线度是要在那上面一条范围,下面一条范围,这个范围的值和是零点一,也就是正负零点零五 啊, ok 吗?这里的零点一指的是正负零点零五,是在这样的一个范围内啊,在这个范围内,然后呢来回波动,当然这个正负零点零五的话呢,是不带定位的, 也就是说呢,它的最高点和最低点,它的波动值只要不超过零点一就可以了,因为我们一般说正负零点零五,它是带定位的,就带某个位置,而直线度只形容它的形状,而不考虑其他的东西, 明白了吗?哎,那么对应的呢,像这种轴体零件啊,基本上呢也是可以标注直线度的,来大家看一下,看到吧,也是可以标注这些所谓的直线度的,那上面这根轴我们说沿着外壁部分,对吧?注意啊,是外轮廓部分,他的直线度, 明白吧?就说他是一个投影式图里面的直线度,而这样标注的话,就意味着看到没有,反零点零八指的是中间的直线度,而且注意反零点零八指的是上下左右都有,因为我们现在看到没有,他这里光标一个零点一,意味着上和下 有上下方向的波动,前后方向没有投影的反零点零八就意味着我们的前啊后上下四个方向都有范围约束,而这样的范围约束呢,就会形成一个圆啊,我的轴线只要在这个圆里面啊,在这里,在这里,在这里,在这里都可以,只要没有超出这个圆就 ok, 明白吗?这个叫直线度。 然后我们接下来讲一讲平面度,其实平面度比直线度要应用的更多,更加的广泛,我们几乎在所有的安装面上面,关键安装面我们都要去标注这个平面度,怎么标呢?这么标平面度的标标识呢,是一个平行四边形,它跟直线度不一样,直线度是一条横杠,而平行四边形代表的是我们这个平面的平面度, 就是我们说这个零件啊,这个面他的面上面的区别,那么这个面的话呢,大概是这样子的,来大家看一下啊,这是我们说标平面度的一个意义,大家发现没有,这里好像是有三张纸一样,上面有一张摆平了的纸, 下面有一张摆平了的纸,而中间有一个弯曲的纸,这是我们在描述平面度的时候会应用到的一个描述方式,也就是说上面是范围,下面也是范围,而中间就是我们现在这里有一个面, 对吧?在三维建模软件里面呢,他肯定是绝对的平面,但是我们加工出来他不一定,对吧?他加工出来很有可能会有各种各样的崎岖啊,啥玩意的?那么在微观上面呢,我们就要去做一些呃,实际的一些投影啊,你看啊,三格,对,没错,三格, 那大家看一下,就是我有很有可能我加工出来以后呢,这里凸起来一点点,对吧?那这边凹下去一点点,然后呢?这边凸起来一点点,然后这边凹下去一点点,对吧?你看这边呢? ok, 来凸起来一点点,凸起来一点点,对吧?凸起来一点,对吧?这我们肯定可能加工出来以后,这个平面其实是这样子的,这很正常,在微光上面一定是这样子的,所以我们要去约束他,那我们怎么去判定他是不是合格的?那么我们就以他为平面啊,来添加,再次添加一个平面啊,来给他个范围,比如说往上走这么多,对吧?然后呢再添加, 再往下走这么多,对吧?你看只要我中间这个面,在上下的两个面的夹层里面,他只要没超出来啊,那都 ok, 明白吗?那都 ok 啊,那么这就是我们说的平面度的部分,那什么叫不 ok 呢?来大家看一下,比如说我这个时候有一个有一个点啊,那冲出来了,看到吧,这就是我们说的平面度不足呢,比如说这里有个点下去了, 对吧?你看没有下去了,好,那么这就是我们说的平面度不良,那我现在问大家一个问题,我们现在这个面啊,如果这两个点没有完全凸出来,那它平面度是不是合格的呢? 来,三二一。答案是合格的,因为平面度是不代表有这个,等一下啊,不代表这个位置的,也就是说实际上我下方还有空间,上方虽然超差,但是呢,如果我是这样去看待它的话,你看,嗯, 对吧?他依旧是没有超差的,明白吗?注意了,平面度是形状公差,他是用来形容这个形状的状态的,而不是位置,所以不会说我这个两个面是固定的,要在哪个区间内, 对吧?你看,我,我不是说固定的,我非得在这里或者非在这里,而是跟随这个面而走的,只要这个面能够取到它合格的值,那么它的平面度就是合格的。好,那我现在再问大家另外一个问题啊,来,我现在全部给它删掉,好吧,来添加一个网格立方体啊,就是我们在加工的时候,有的时候总会面临一个这样的有意思的事情啊,比如说这个和这个,对吧?哎, 好朋友们,我现在问大家一个问题,这个平面度是不是合格的?来,三二一,好, ok, 其实答案是合格的。那有的朋友说,那你这都倾斜了呀,是吧?你这都倾斜了,你跟我说这对不对?其实不是这样子的啊,你看来我现在加个平面来,对吧?你看我这都倾斜了,是吧?然后呢?再加个平面, 那看到没有?那你,你要说我哥哥哥们俩,我现在这难道不是这对吗?对吧?我都倾斜了,实际上啊,比如说我要把来,我先给他拉出来一点点啊,这个稍微窄一点点,你看, 如果你看我,我要这样去看的话,我肯定不合格,但是我们记住了,平面度是没有位置的,所以这个东西的平面度测量,我们应该是这样去测量,明白吗?你看到没有呐?这边这个就是合格的, 明白了吧?所以我们说平面度,平面度一直讲行位公差,行位公差,这里面讲的形状公差,指的是自身的形状,跟他在空间里面是倾斜 的,是歪着的,是旋转的,我们都不管啊,我们只管的就是他到底这个形状是不是最高点和最低点之间,在这个范围内,所以我们后面的数值零点零八,指的就是我们的这个最高波动点和最低波动点之差, 如果超过了就是不合格,如果没超过,那么就是合格的, ok 吗?好的,这节课呢,我们讲了直线度和平面度,那么我们下节课来讲圆度和圆柱度的区别。 好的,我们今天来讲一讲平行度公差啊,这个我要单独发一个视频,因为我要组合平面度来讲。其实上一节课的话呢,我们讲的关于平面度,对吧?大家对这个平面度有一个基本的定义,它是形状公差,那么我们接下来讲位置公差、 行为观察往往是一体的,互相配合使用的,但是呢,他们之间呢,又有区别。首先第一个平行度的标示方式呢,是两条杠啊,我们在这里表示平行斜着的两条杠啊,那个手绘图同学们呢,就要记得,别,别画成竖杠了。好吧,软件出图的就无所谓。 好,我们现在找到关于平行度公差的刻件啊,在哪呢啊?在这啊,平行度看到没有?那么线对线的平行呢,基本上呢还是用的不多,更多的呢会用在轴线上面,也就是说他需要这里,这里有两根轴啊,有个两个孔,孔是有轴线的,他要求这两根孔形成这个虚拟的不存在的轴线,要达到一定的平行度, 对吧?但是呢我们用的更多的呢,是这个面对面的平行度,那面对面,那么面对面的平行度呢?也就说我上面这个面和下面这个面要保持平行,但是同样的这个事情他没有那么简单,为什么呢?等我手绘一个图啊,来先画第一个平面, 对吧?这第一个平面,然后呢我们再画假如啊,他们两个如果不相干,对吧?那比如说我再画第二个平面,那他们两个平行是不是意味着他们之间的夹角要成零度或者一百八十度, 是这意思吧?对吧?我们很多时候总是喜欢把位置公差呢,把它转换成角度,但是其实我想告诉你们说这个是不对的,明白吗?这样做是不对的,为什么?因为你要知道我们不同的平面,他能够实现的这个平行的能力,角度是不一样的,面越这个面越大,那么也就意味着他的这个角度的偏差他越小。你比如说你看, 那如果这个面很小的话,那我偏偏一点就偏差也不大,对吧?偏个九度也没关系,但是如果这个面很大,来大家看一下,那偏个九度意味着什么? 那平个十度看到没有偏差会非常非常夸张,所以我们为了约束这种情况的话呢,我们基本上是换了另外一个方式,对吧?等一下啊,就这个面,然后呢我再复制一个面出来啊,那虚拟的面给他一个范围啊,再放一个范围, 等一下啊,往下往上走,然后呢这个面往下走,对吧?然后呢给他缩小一点点啊,看到吗?我们会给他一个范围,也一样啊,按照我们之前的那个平面度的说法,也是一样的,上下两个范围,你只要在这个里面,那你看往上偏一点点,呃,他可能偏偏偏的偏不了,那么那那什么, 那只要在这个范围里面,他就是 ok 的。 所以啊,平行度他其实给的也是一个范围,那比如说在这里的话,如果是零点一, 对吧?零点一,那么我们这样的标注的话呢,就是那平行 g a, 等一下啊,这个不能这样写,沿着这个方向啊,等一下啊,我稍微重新画一下,那看到没有?这个距离是零点一,对不对? 那零点一,那么我们在这里的标注方式呢?就是很简单了,对吧?平行度的符号零点一的范围,那么他就有几种面,要基于 a, 知道吗?基于 a, 那 a 就是 我们的参考面,所以位置公差是一定要有这个参考的,没有参考的话,我怎么知道我位置怎么搞, 对不对?那么再说说本质问题就是什么呢?他必须要基于这个面,然后形成的这个虚拟的面,再来定他的这个范围值,他们之间是这个关系。所以我们现在面临另外一个问题,就是,那如果我这个面他自己也是个波浪形, 比如说是个波浪形,那我怎么去约束他呢?我们俗称上梁不正下梁歪,对不对?上梁不正下梁歪,我们经常会说这句话,那如果我被参考的这哥们,他自己都是个歪的,我怎么能够保证上面这个玩意他平行度, ok 呢? 所以在这里面我们就会面临到另外一个更加严格的要求,什么呢?他要标注这个平面度,你得先约束自己, 你才能做个榜样,对吧?零点,比如说零,他是零点一,对不对?我这里零点零五,我假如是这样子,这样才对,这样才是一个完整的关系,明白吗?那平面度和平行度,他们之间才是有了一个相对的一个稳定的关系,自己如果都是个歪的话,那别的就都别说了, 对吧?好,那 ok, 我 们现在把这个平面度加上去啊,啊?平行度啊,在平行度,呃,在这缩小一点点啊, ok, 所以 我们现在来到绅士的案例里面来看的话,来,大家看一下这,这个块, 这个安装块,大家看到了吗?那在这边啊,他有一个平面度啊,然后呢?在这里他有一个平行度,这个其实是面对线的平行度, 对吧?面对线的平行度,那么我们在上节课讲过,我们标行位公差的时候,基本上是设计、加工加测量三位一体设计啊,从设计的角度来讲,我们要求他自身达到一定的标准,对吧?然后才能够保证这一根轴线啊,相对于他实现平行, 这是第一个,对吧?有了平行以后,那我安装在机构上面的时候,我的安装底面在这,我装在这里以后,那我在这里面装轴承,装轴,我才能够保证我轴是准的, 对吧?他们之间要互相有关系,那么既然他是我们的安装面,也就是我的精度是从这一条面这个面传递到我的这根轴线的,那么对应的 我机加工的时候,是不是也应该先加工这个面,然后以这个面为底面安装,然后再去加工这两个孔位,所以这玩意得上 cnc, 对 吧?当你上普通的计算能不能行?也可以,普通计算也可以搞个分度头啊,也不是不能解决这个问题,对吧?所以这是我们说的这个 加工的机准和我们这个设计的机准尽量要符合,最后就测量。那我怎么去测量这根轴线呢?其实很简单,你把到时候把这个三坐标啊上面,把它放在三坐标上面,然后呢这个底面朝下,放在我的三坐标的测量平台上,然后去测量我的内孔,甚至说我直接把轴装上去去测它的跳动也 ok, 明白吗?测我的全跳动啊,测全跳动就太麻烦了。测量方法有很多种,所以我们要追求的是三位一体,所以有平行度的时候就一定如果参考面是个面,参考是个面,而不是一根轴的话,就一定要记得标注上它的平面度, ok 了吗?这就是我们说的平行度的原则,使用原则。好的,这节课呢,我们先讲到这下节课来讲一讲垂直度。 好的,我们上节课讲了关于平行度的基本应用,对不对?那我们接下来讲垂直度,其实垂直度的话就更加容易引起误会来,我们现在呢,继续拿这个来看啊,比如说我先把这两范围,呃,先给他拿走,好不好?先给他拿走啊,拿 走。你看我们说一个底面,他也是这个位置公差,对不对?那我现在有一个这样子的垂直的一个关系,看到了吗?其实很多同学都喜欢养成这种习惯,就是垂直,垂直多少度呢?给大家两秒钟思考一下, 对吧?九十度嘛,对不对?他们之间的关系我们就会说,哎,他一定是九十度,你又要把他带入到尺寸啊角度公差里面来了,其实没有必要明白吗?你看我们说,呃,等一下, 那我们说的这个九十度,那是不是意味着我的这个垂直度公差就是那九十度正负?比如说零点一度是这样子的吗?不是,因为还是那句话,因为你这个高度不同,那这个面大小不同,那么意味着同样的角度偏差,他的加工加工要求是不一样的, 对吧?你如果面特别的大,你说要正负零点一度会非常非常难,但是如果面特别特别的小,对吧?那正负零点一度,你会感觉,哎,这个加工好像不难哈,也不难,对吧?所以我们平定公差等级标准的时候,是根据加工能力来定的,而不是根据其他的,所以我们在同等加工能力的情况下面,那么对应的是会有不同的这个数值的, 那你看,所以严格来说我们这个这个数值他应该是这样子的,那看没有垂直度,也就是说我会给他立一个虚拟的垂直度的一个位置啊,虚拟的完美的在 cewoks 里面建模完美的一个九十度的这个空间,然后呢?以中间这个参考的这个面,然后再来定我两侧的范围,那也就是说这个面如果稍微偏一点点, 那偏一点点,这个是 ok 的 吗?那给大家三秒钟想一下,三二一。哎,答案是 ok 的, 因为他没有超差,那你看看这个角度,其实已经不是九十度了, 对吧?没毛病吧?所以垂直度的定义要求其实就是从这个角度来的,知道吧?从这个角度来的,我们同样的一个面,那么我们给他左右两个范围啊,你肯定说我面越小,你看我面越小,你看我还可以偏这么大, 对吧?我同样的数值,那么也就是说我们为什么会说同不同的这个尺寸,他的偏差不一样,原因就在这,那我同样的加工能力等级,如果尺寸更小,那我给的范围他会更小,明白吗?那看到没有?那你看, 你看我给我给的范围会更小,那如果这个面越大,你看如果这么大,对吧?那我的偏差肯定要不能那么夸张了, 对吧?那你的偏差基本上要控制一下了啊,等一下,你看,做的很难了,对不对?那么我们的范围会给的更大一点点,明白了吗?所以多少级加工等级就决定了我的这个加工的能力,以及我根据我这个面的尺寸来决定我这个偏差的范围。垂直度的标注呢,其实也是一样啊,非非常的像,那我直接来这个吧, 那比如说我会指到这个面,对吧?然后呢画个框啊,画个框,那么垂直度的定义呢?就是一个这样子的一个倒着的梯形,那么比如说我给他的是零点一的公差,那么他要有直角面呢? a 看到没有?那么这下面就要补上直角面的符号, 对不对?那补上直角面,你要参考他吗?不然我参考谁呢?那么同样的上梁不正下梁歪,那我们上梁是不是还考还得考虑一个平面度公差, 对吧?呃,画的有点丑啊,不好意思啊,见笑。这个那鼠标手搓终究还是不一样。那。哦,这就不能零点一零点零五,对吧?我自身要求要更加严格,他才能够保证后续模仿他,参考他,学习他的这个面他能够达到要求,如果自身要求都不高的话,那就废了, 对吧?是这个道理吧。 ok, 来,我们先把笔记加上去啊,那看到,所以他们之间也是成对出现的,那么对应的来看到这边也是一样,看到了吗?垂直度零点零五,相对于 a 面, 对吧?相对于 a 面,那么对应的 a 面的话呢?在这一样的啊,在这里的话呢有平面度要求,那为什么这一边要有垂直度?其实原因很简单,这上面有一个法兰安装在上面,看到吧,那 他有一个这样的法兰装在上面,那如果这个平面他的垂直度歪了,那么这个法兰跟中间这个孔的轴线他就不同芯了,他 不同轴,我不完犊子了吗?对不对?那装上去就装不上去了,所以你只要是有跟零部件安装的有精度要求的,我们统一都要标注这个行位公差,而这一面为什么没有标行位公差?因为这一面无所谓, 明白吗?这一面真的无所谓,他不需要去安装任何的东西,我只要保证我这个面有什么关系呢?其实也没有什么关系, 懂什么意思吧?这行为公差不是瞎标的,我们都要根据我们的需求来,实际的需求来,而不是说我直接我觉得这个面要标,那我就该标一下,而且他们之间会互相有关系的,那么你想不想知道这个数值是怎么来的? 零点零一五,零点零五,零点零四,我们怎么去决定这个数值的?想不想知道?那么这节课先讲到这,我们下节课来讲一讲公差的这个偏差数值,以及所以函数插件的应用。 好的同学们,你们想不想知道在标行位公差的时候,这上面的这些数值是怎么确定的,对吧?我又怎么去知道,哎,到底是零点零五还是零点零四呢?我们只知道说位形状公差的数值要收的更严,而位置公差的话呢,放的更宽, 对吧?但是到底要宽多少呢?这是无数新手非常头疼的问题。其实我想说的就是一切我们前面讲过,都是跟公差精度等级有关系的,我们首先确定第一个定义是什么呢?就是 公差精度等级啊,来,我给他放大一下,大家耐心等待一下啊,一个好的笔记需要一点时间,对吧? 决定了啊,用什么形式的机加工对吧?而我的零部件尺寸大小,各种各样的大小, 决定了偏差数值的大小,对吧?很多人会说,哎,那我就查表,其实我想说这个东西没有必要查表,因为他同样的精度等级,同样的尺寸大小,他不同的行位公差,他很有可能数值也不一样,所以我们要学会的就是这一个点,就第一个是什么呢?找准基准尺寸,然后 插件查询,明白吗?首先我要说的是机准尺寸,同学们,你们想一下来机准尺寸什么意思?比如说我们这里的零点零幺五,对吧?这个面也就是我们这个安装做的底面,大家看一下呢?这个下面这个底面呢?看到没有?那这个底面,这个底面它的平面度,它难加工,在哪? 你想想,也就是说我们的底面的这个面长成这样的,看到没有长成这样,那么长成这样的话,是不是意味着他有宽啊?等下宽八十,长一百毫米,对不对?对吧?你要想尺寸越大越难加工,所以我们严格来说这个面他最大的这个直线的长度是多少? 朋友们想一下最大的直线长度是多少?等一下最大的应该是对角线,对不对?你看对角线是一百二十八点零六, 对吧?也就说我这个平面度最容易出现什么不稳定啊?超差,其实就是因为这两个点,也就是这四个边,对吧?到中间他很有可能会出现什么波动啊偏差,所以我们要选择的这个基础尺寸应该是一百二十八点零六,也是一百三十毫米。 当然很多同学也包括我有时也偷懒,就是这我我还是换一下,他对角线其实好麻烦的,那我能不能按一百算呢?如果说,呃,差不太多也 ok, 明白吗?如果差的不是很多的话就 ok, 那 一百三和一百其实差不太多的,所以这个就是我们的直角公差啊,直角尺寸,直角尺寸在这这样的一个平面,那对应的,如果我说你看这一边 垂直度,对吧?零点零五又是怎么来的呢?对吧?这竖立的这个面也就是我们这个机构的背面啊,等下我看下正面 啊,对,正面,那这个面看到了吗?这一整个面,那这个面难加工的点应该就是这里的对角线,对不对?当然你测看这个竖边也 ok, 你 关键是要看长的那个边,对吧?所以你看他这个长的边是一百二十,那么如果你要我要乐意的话,我这里干个对角线一百五十二也可以, 对吧?这是第一个,我们怎么去确定它的基本尺寸?那么确定了基本尺寸以后,那么我们在大工程师里面有一个公差查询的插件啊,那个需要大工程师的这个安装包的同学们呢? 想要这个插件的同学的话呢,发六六六全部带走啊,不要米。那么在这里的话呢,有个行为公差对不对?那么我们现在直接来输入啊,比如说我的这个面,我如果是输一百毫米,对不对?然后呢前面讲过机加工精度来讲的话,我们洗床一般来说六到七, 那如果是数控洗的话呢,基本上全自动的啊, c n c 一, 我标个六级可以,那如果说你是这个呃,普通洗床,或者是普通的这个什么三轴洗床,就标个七级也 ok, 那 么七级的话呢?来下面选到平面度,看到没有 平面度,那零点零一五的数值就是这么来的,明白吗?零点零一五的数值就这么来的,那如果说我们旁边这个垂直度呢,对吧?垂直这个面是多少?是一百二十毫米。哦,对,这个我试一下,一百三是不是一样的 啊?一百三,一百三会稍微大一点零零零二,对吧?差不多啊,差不多,反正这这种基基本上的精加工的话,如果要严谨的话,你要算对角线了,如果不严谨的话,其实无所谓,对吧?好,那么这边一百二,然后呢?垂直度, 垂直度是零点零五,零点零五是这么来的,明白吗?零点零五这么来的,而且你注意他还需要有基准,所以他应该是这样子来用, 对吧?这是我们说用插件来解决这些数值到底要怎么去定义的问题,对吧?基本尺寸,那么后面的内容呢?我们基本上都会慢慢的开始使用这个插件来告诉大家怎么去出这个工程图,我们怎么去定?比如说同轴度啊, 这包括这个什么圆度啊,圆柱度啊,这些东西, ok 了吗?好的,这节课呢,我们呢下节课呢,继续开始讲行为工厂 今天解答几个粉丝的问题啊,那么前面视频发出去以后呢?有很多同学呢有疑问,对吧?就是为什么,哎,你在课上展示这些图纸和我们在公司里面实际用的图纸不一样,我们公司里面用的这些图纸出的图纸他根本就没有这么多尺寸,对吧?经常会说,哎,我随便标就完事了,甚至我都不标行为公差, 对不对?那为什么到了你这里,哎,你我这里要标个行为公差,那里要标个行为公差,难道说我不标就不行吗?我不标能不能做项目?事实上是可以的,那为什么呢?哎,在这里给大家看一个案例, 来啊看,这是一个零件啊,一个支架安装板,对吧?呃,可以看得出啊,年久呢?年限久了以后呢?有点生锈, 那其实我们从这里可以看得出来,这个零件啊,在安装面的部分他是不会生锈的,这里正好也可以给大家解答一个问题,就是像这种零件我要怎么去做防锈,对不对? 如果说你只是安装面这一块的话,其实你根本没必要做防锈,做防锈反而会影响精度,当然发黑不会啊,但是呢,你要是做肚疼的话呢,会有一点点影响精度,所以你看他装了这么久以后,用了很多年以后,他安装面依旧是没有生锈的,大家不用担心。那至于非安装面部分,你看这个地方生锈了,对不对?那无所谓啊,他反正不是安装面, 对不对?这是我们说的一个防锈的问题,那么你在这里可以判断出来,这上面是安装面,安装了东西的,这下面也是安装了东西,也是这两个面他其实是有精度要求的,那么像这种背面他有精度要求吗?那肯定是没有的,我不装东西我无所谓,包括侧面也是一样,看到没?那包括这边侧面他基本上呢?哎,锈的已经比较黑了,对吧?好,那么我们现在我找一个有没有卡尺啊? 我给大家看一下,看一下我想展示的一个东西是什么?就是这里面我们会涉及到新老标准的国标的一个,这个包括我们现代化制造业的一些。呃,我们说矛盾也好,什么样也好,都 ok。 来给大家看一下,我们现在卡的这个宽度尺寸是七十点零四毫米零五毫米,看到吗?零点零五, 零点零五,那也就是说他实际上他的尺寸应该是七十毫米零点零五意味着什么?意味着实际上他这个两边相对来说还是有一定精度的,对吧?如果大家不信,我再测一下长边啊,你看一下长边有没有啊?要不要开始我对个零啊?好,对零, ok, 来, 哎,那看到吗?那一百零九点零三,也就说它比原本的整数一百零九毫米大概多了零点零三到零点零四毫米左右,其实这个精度相对来说还是比较 ok 的, 比起我们这种位距公差的偏差来讲,还是很 ok 的。 那为什么会这么做呢? 为什么会出现这种情况呢?就是,哎,我明明是没有精度的面,哎,我仍然加工出来做成品精度这么高,其实有一个核心的原因,因为它是数控加工出来的 数控机床,其实严格来说他是保持自己的加工精度,那也就是说我一刀走下来,一刀走下来,我其实没有太多去分辨,关于说,哎,我这个地方是不是精度要求高, 对吧?还是说我这个地方精度要求不高,对于数控来讲其实没有太多区别,这就是为什么在很多公司他不标工差,那反正是拿数控干,对吧?我不管你是安装面还是非安装面,其实我精度几乎是一样的,我不可能说我编程的时候说,哎,我这边特意精度做低一点点,那没有这种玩法,明白吗?所以 这就是我们新老加工的一两两种形式,因为以前我们这个加工机械他没有那么发达,那么机床的话呢,可能我们在有些地方呢,我走的会稍微慢一点点, 有些地方的话呢,像这种地方我走的慢一点,加工的精度稍微高一点点。像这种地方的话呢,我加工的精度呢,稍微低一点点,我走的稍微快一点点,对吧?但对于现在来讲的话,数控的精度基本上已经做的非常非常 ok 了,包括国产的机床,所以加工出来的零件以后,你会发现整个零件所有的特征,它的一致性都非常非常好,所以你标不标公差也一样,明白了吗?所以那我们现在面临另外一个问题,那要不要标公差呢? 我的答案是啊,就是你能标最好还是要标注一下,如果你不标注的话,那么你别忘了我们的公差还有另外一个特别有用的意义,除了加工以外,他还是测量, 那你怎么去平定这个零部件上面,哎,如果说数控确实,比如说加工出来有点点问题,可能那个床子有点问题,怎么样啊?我们先不讨论这些细节,但是就是加工出来有问题,那么你怎么去判定这个零部件不合格呢? 对吧?我们说的再通俗一点,这玩意是用来扯扯皮的啊?可能,呃,扯皮如果是方言,大家听不懂的话,其实就是我们用来处理纠纷的,那么如果他的零部件加工出来不 ok 的 话,我们要拿着这个图纸说,哎,你没有按照我的图纸加工, 对吧?当然也有同学在评论区里面说,哎,那我如果说我不标这些公差,加工的成本会低一些,其实我觉得这个东西他其实有点扯淡,但是呢,也的确真实存在,就是他会有一些加工厂,他看到你的这个加工图纸以后,看到上面有大量的行为公差,他就会给你增加这个呃,机加工的这个价格,我觉得这是一种非常非常不专业的行为, 就是我本身的要求就的确是这么多,对吧?那如果说我现在你加工出来没有按照我的要求来,我装上去不能用,那到底怪谁呢?所以大家要思考这个问题,如果说你发现这家机加工的厂家,你没有标注这些行为公差,没有标注这些,呃,标准尺寸还是要啊,这什么行为公差呀?精度的你家这东西都没有,但是加工出来的零部件也 ok 的 话, 那么你可以去跟他谈一谈,对吧?你看你其实已经达到了我的要求,你的本本来的加工能力就有这么高,对吧?那我如果标注一下和不标注其实都是一样的,我标注一下是不是显得我更规范?但是如果说你这玩意你没有出行为公差,没有给精度,然后呢?他加工出来一坨啊,就是一坨,那你这样子的话,你根本就用不了的话,那你就一定跟他降到底了, 对吧?我加工出来的零件你现在不能用,你便宜有什么用,对不对?而且基本上每个城市每个地区的加工的价格是有比较有差异化的。如果你本地的加工商都是如此的不专业,你不如不妨考虑一下外地的加工商, 对吧?外地的加工商就比如说我就喜欢很很喜欢从外省去找一些加工商,因为相对来说会更加专业一点,甚至他们的报价会更低一些。所以在各种各样带项目的过程中呢,有一些经验分享给大家,你们也可以去考虑一下是不是到底是哪个环节的问题, 所以工差就是这个样子,就像我在第一个视频里面就讲过这个,就是他虽然有国家标准,但是你要知道不同的行业他有不同行业的标准,不同的企业也有不同企业的标准,甚至稍微草台班子一点点的,他在一个企业里面有两个,两个研发小组,这两个小组的标准都不一样, 所以我们还是要想明白他的目的是什么,目的就是把这个零部件加工出来,人家能够看得懂,正确的把它加工出来,然后正确的装配上去,确保这个零部件能用,这就是工程图的意义,而不是说我在纠结,哎,我到底要怎么标,到底要怎么标, 对吧?我这边我不标,你那边你要标,其实都是一样的,我们只要达成这个目的,那么这就是 ok 的, 明白吗?工程图从来都不是衡量一个 自动化研发工程师的水平,但是工程图你一定要想明白这个道理,你只要能够达到他的这个要求,那么你工程图的水平就到位了,那么你接下来的思维就应该在于各种各样结构的搭建,各种各样结构的设计,包括各种各样标准件的选型,来节约这些成本,明白了吗?好的,今天的分享就先讲到这,我们下期再见 啊。这节课呢讲倾斜度,其实呢,说实话,倾斜度这个东西的理解呢,呃,跟垂直度很类似啊,按道理来说呢,我应该是要放在垂直度一起讲的。 那么很多同学们在说,哎,上节课的话呢,发现垂直度呢,其实都定义为九十度,对吧?但其实他并不是九十度,只是说他理想的这个参考是九十度,然后呢,再以这个九十度这个分界线呢?啊,这个定位线呢,来拉出左右两边的一个范围的,那么倾斜度和垂直度唯一的区别是什么呢?就是他不是九十度, 对吧?他不是九度。你要知道倾斜度是一个应用,很不多啊,不能说很少不多的一个行为工厂,行为工厂啊,因为垂直度呢,其实我们很多机构在做非标设计,都是干那种垂直度九十度,因为这样的话加工好加工,但是有的时候我们总会面临说,哎,我需要一定的倾斜角度,他不是九十度,那我就得用倾斜度标注。那么我们怎么去理解呢?首先第一个,这是个什么东西啊?这是个轴, 看没有拿这根轴,一根轴啊。然后呢,这个轴的话呢,还有个阶梯轴啊,有大轴和小轴,那有大轴和小轴,那么大轴的话呢,是一根直的,那就不用说了,那么他在呃,这个倾斜的这个地方呢,打了一个六十度倾角的一个孔, 对吧?那这玩意的话呢,你要拿普通洗床去打的话,会比较麻烦,说实话数控呢,倒是方便一点,普通洗床,估计你那个那个炮台估计要开始打表了,对吧?那么你可以看到他的标注方式呢,和我们的那个炮台估计要开始打表了,对吧?那么你可以看到他的标注方式呢,和我们的那个炮台估计要打表了,对吧?那么你可以看到他的标注方式, 垂直度不用标标度数啊,就是九十度,我们是其实不用写,大家都知道倾斜度必须要标,因为你不知道它是多少度,它除了九十度都有可能,对吧?所以呢,你要在它的虚拟的这根轴线上,那这是被参考的轴线啊,然后呢再去画另外一根虚拟的轴线,这个轴线我需要讲解一下,它不是真实存在的,它真不是 这个零件呢,加工出来它就是一根轴,怎么可能会有轴线呢?对吧?但是它的基础呢,又是由 a 和 b 两边共同组成的,那么它是怎么去定义呢?我待会来讲测量,那我们先讲定义, 那么也就是说我在基基准面的虚拟的轴线为基准,然后呢往上呢挪个六十度倾斜,那么在这个地方呢,哎,我们差不多给到六十度,然后呢会有一根被参考的这个 基准拿过来的这个参考基准线,那么这个参考基准线的话呢?哎,我们的这个孔的话啊呢看见没有?这是一个孔,那么孔他也有一个虚拟的轴线,虚拟的轴线你不能超过我给的这个范围, 对吧?那也就是我这个孔,实际上的时候他如果是轴线的话,我孔套不到,这也行,只要我轴线在这个范围内,他就 ok, 对 吧?其实呢,他为什么这样标注?他为什么不直接标注这六十度正负,比如说正负一度呢?道理还是一样的,和我们前面讲的垂直度是一个道理,就是你如果说 你标正负多少度的话,那么他的加工难度就取决于我的这个轴线的长度了,这个这个孔越长,他就越难加工,那孔越短,那你别说正负一了,正负零点五度我也能做到,别说正负,零点零一我也能做到, 对吧?都可以。所以我们要在标行为工,他说一定是这样去给一个定义,就是我给的实际是空间内的范围,我也能测量,对吧?我也能够测量这些东西,那么未知度的标注呢?大概就这样子,然后呢?接下来讲参考,那么他是 a 杠 b 的 参考什么意思?他会发现,哎,你会发现他有两个参考,对不对?其实他是一个参考,这是一根轴呀,那么我们在测量的时候,是不是我要把它支撑起来, 难道我只支撑一边吗?我们一般来说的话,轴内测量我要支撑两端,对不对?支撑两端,支撑两端以后,那我现在支撑了这个 a 面, 又支撑这个 b 面,是不是意味着我现在这个零件在空间中的定位是以 a 和 b 共同支撑来实现的?那我是不是可以理解我现在这个被参考这个虚拟的轴线,他就是我被支撑的这个基础面,对吧?共同组成的,而不是单纯的。如果说你在后面只看到一个 a 的 话,你就会发现他,那么他的测量方式应该是搞个三角卡盘 这样子,等下画的有点拙劣,只夹一边,对吧?那么我们这个时候在测量设备上面,那这根轴线就是由 a 单独完成的,跟 b 没有关系,对不对?跟 b 没有什么关系,但是如果现在是 a 跟 b, 那 我当然不能同时夹,我同时夹的话,我就没那么高了,对吧?所以我们一般会做一个 v 型支架,等下啊, 我们会做一个 v 型支架来从这边看啊,哎,对吧?就是如果你经常跟轴打交道的话,这种 v 型支架你就知道什么意思, 它有归中的功能,然后呢把轴呢放在这个 v 型里面,那么 ok, 我 现在的测量方式就是 a 杠 b 了,也就说 a 和 b 面被支撑以后,共同组成的这根共有的轴线,那么沿着这根轴线呢?往上翻六十度啊,往上翻六十度,那翻上来以后,那么这就是我们这个理想的这根轴线, 理想的这种轴线啊,就是我们在所有 word 里面,它是绝对是六十度的,你在所有 word 里面建模要都不是六十度的话,那我觉得你这个图纸是有问题的,对吧?理想状态,那么我们加工出来以后,它这个孔,它的轴线就得在理想轴线左右一共加一起零点零八毫米的范围内 就 ok, 如果超出了,那就不行,当然他没有加反,大家发现没有,我们前面说加个反的目的是什么呢?就是在空间内他要有前后左右,但是呢你没有加反的话,那也就意味着是我们的这个矢图里面啊,这个矢图里面呢,往右下角偏或者往左上角偏,对吧?这个范围是零点零八,那么前后方向他是不管的,那我现在换另外一个, 那这个就是反了,看到了吗?就是说我我这里的话呢,会有一个圆圆形的结面,那么也就是说我在这个基础面里面啊,他就会有左右前后四个方向啊,两个方向,前后和左右两个方向共同组成的一个反梯,知道吧?这就是我们说的位置度,然后实际上呢,我们更多的应用的位置度的话啊,不是位置那个倾斜度啊, 倾斜度的话呢,基本上是用于这样的零件,这样零件呢在汽车行业的工装家具里面非常非常常见,知道吧?因为你要装那种汽车的各种的门板啊,对吧?包括我们的车架的工装家具,他是曲面的,他不是横平竖直的,你谁家车是横平竖直的,对不对?都有一点点弧度。那么我们在做工装家具的时候,就得为了适应产品的这个形状,然后呢去做一些倾斜的状态, 那么倾斜的状态的话呢,你看我们就需要这样去标注,那很简单,我们测量和我们的加工和我们的设计基础全部三合一,也就是底下这个面, 那也就是说我在加工的时候,我先把底下这个面加工平整以后,然后呢翻个面来,以它为固定,固定面,对吧?放在这个喜床上面,然后呢再去加工这个面,所以以它为基础去加工它,然后呢以它为基础去设计它,以它为基础去测量它,我们三合一的概念就是这样子,所以你看我现在给了个四十度的夹角, 对吧?有一个四十度的夹角,那么它的倾斜度零点零八的含义就在于,哎,我理想的这个四十度线大概在这,对吧?那么 ok 范围, 那这样的范围,那么 ok, 零点零八,明白了吗?零点零八,那也就是说我这个面的稍微倾斜一点点,可不可以呢?只要没超过这个范围内,那么 ok 他 就是合格的,这就是倾斜度的基本应用。其实本质上来说他和垂直度是有点类似的, 只是说他不是九十度,而垂直度是九十度,所以他需要标注这个虚拟线的度数,而垂直度其实往往是不需要标注的,因为大家都知道是九十度,明白了吗?好了,这几个呢,我们先讲到这 好的同轴度,我说实话,同轴度的应用范围非常非常广,用的非常非常多。你们在做轴类零件标注的时候,你是不是经常可以看到别人出图有各种各样的两个同心圈,看到没有?那这个叫同轴度啊,在这里看到没有,那同轴度,他也叫同心度,那么这种同轴度,同心度,它代表什么含义呢?其实它指的是两个轴和轴之间的关系, 对吧?就是一根轴,他有大轴和小轴的区分,那么就可以把它拆成两个部分来单独来理解。那么呢,我们先看看定义,我们先看一个平面零件啊,他不一定是轴了,对吧?圆柱形的平面板,这个盘子型的零件,那么呢,他现在标了个同轴度啊,你看到没有?两个同心圆,然后呢?反零点零一杠 a, 然后呢标注的是外面这个圆, 看到吗?外面这个圆,那外面这个圆的话呢?它的参考面 a 的 话呢,是内孔,内孔啊,那里面这个圆,那它是什么意思呢?就说外面这个圆,它的圆心,这个圆的圆心,它要和里面这个圆的圆心的位置相差,要在零点零一范围内,而且是一个圆形的空间,也就是上下左右前后它都是零点零一的范围, 对吧?那有同学可能会问,那我怎么测量,对吧?我们标工差就一定要考虑测量的问题,测量其实很简单,我们弄一个工装夹具,精度比较高,将它的内孔将它定位住,定位好了以后,哎,然后呢,我们再去测量它的这个外外部的这个圆,对吧?一般是做旋转啊,旋转一下,然后呢在这里呢做个探针啊,做个探针,或者搞个微仪传感器,看一下它这个圆形的这个高低波动, 知道吧?高低波动,如果你这个圆是一个这样的形状,对吧?那你这一转你就知道了,对不对?那你这一转,这不这不凸轮吗?对吧?那还是轮系零件,这不直接干成凸轮呢,对吧?但是呢,这种应用的话,基本上工装假就你们用的比较多,但是呢,更多的,我们设计传统轴的时候,这种形式会用稍微多一点,对吧?我们上节课呢,其实有讲过啊,就关于这种轴线的问题, 对不对?那我之前呢再强调一下啊,就是首先第一个同轴度,零反零点零八,什么意思?第一个同轴度就不用说了,对吧?那轴线啊,也是他以他为虚拟这个轴线来看一下, 那以它为这个虚拟的这个轴线,对吧?它的轴线要和它的位置,要和 a 和 b 共同组成的这个虚拟的轴线,它的相差要在零点零八范围内,而且是个 far, far 指的是上下一个方向,前后一个方向没有左右啊,这里是没有左右的, 两个方向内都是在零点零八的范围内,对吧?好,那么可能有同学会有疑惑,那奇怪啊,那哥们你要这样说的话,那我这个东西我什么意思呢?对吧?为什么这么标呢?我测量其实好理解,对吧?同桌度不良,哎,测量的话呢,我以他们两个为支撑啊,去测量他。好,先说测量问题,他是怎么测量的?我其实这里简单的做了个动画啊, 来看一下,这是那根轴,对吧?然后呢,这根轴的话呢,其实呢,我现在给他做成了同轴度不两,所谓同轴度不两,大家就这样子呢,有明显的偏移,看到了吗?啊?这个,这个圆的圆心大概在这里啊,这个圆的圆心大概在这里,他没有重合,对不对?那么我们测量出来以后他是什么样子呢? 来来个动画看一下就是了,那看到没有?那上面这个块压的这个圆的表面随着圆的旋转,这个轴的旋转,他在高低起伏,看到了吗?再放大啊,那他在高低起伏,这就是我们测量同轴度的一个测量方法之一啊,再看一遍啊,那看到没有?那上来,下去,上来 啊,下去,对吧?这是我们测量的一个方式啊,如果把速度稍微快点就可以看到明显的起伏了,那看到没?那这就是不同轴嘛,对吧?所以我们说的零点零八,也就意味着这个起伏的部分一定一定要控制住,测量出来如果起伏不大,那就是不良品, 对吧?所以你看测量的方式用两个 v 型的支架呐, v 型的支架卡住这个轴的两端啊,这里我还做了个线位啊,看到没有?一个 v 型,两个 v 型,两个 v 型支架卡在这里以后呢? v 型卡在这里以后,这根轴就会被定位,那么我这个时候测量出来的所有结果都是基于 a 和 b 共同组成的这个虚拟的轴线,这就是我们说的标注的 e a 杠 b 到底是什么意思?那就这个意思,对吧?就这个意思,然后来测量它的这个频移量。好,那现在有一个问题了,那这样标注的目的是什么?我们标行为工厂,我们总是要说,为什么呢? 对吧?来看看案例,来案例,案例在这,对吧?为什么呢?好,一个一个来,首先第一个我们可以看到,在等下啊,在这, 那这是参考面 a, 看到没有?这一根轴啊,也是这个轴的部分参考面 a, 这个是参考面 b, 而且参考面 b 还是基于 a 来定义的。那先抛开这个 b 面啊,先先不看这个基础面,为什么他要参考 a 来做这个重轴度,所以你要写上这个轴他是干嘛的?这个地方他是装轴承的, 对吧?装轴承的来看个动画,我换了个减速机的动画给你们看一下啊,那稍等加速。那这一根轴上面,这一根轴上面他有两个装轴承的位置,你有没有想过一个问题,如果他装轴承的位置他装不准怎么办, 对吧?是不是因为这根轴和轴承根本就没办法装这个箱体上面去,对不对?所以我们刚才讲的 a 面在这,当然跟那个图纸不是一对一的啊,我只是说这里面有一个轴承位,这是 a 面,那么对应的这个 b 面的话,就一定是那同轴度, 这个手搓的有点有点 low 逼啊,没关系啊,零点零二,好吧,零点零二,那杠 a, 对 吧?他就一定要有一个这样的标注,那么也就是说他的这边的轴承的安装和这边轴承的安装必须要有一个高度的一致性,如果没有高度的一致性的话,根本就装不进去,这就是我们说的为什么右边这个端要向左边这个端做参考看齐的原因, 对吧?好,那我接下来再看。那中间这一段粗的为什么会是 a 杠 b 呢?反零点零三, a 杠 b, 这又是为什么?也是同轴做,那也就是他的这个,他的这个轴线,这个同轴的轴线的话,是基于 a 和 b, 中间是干嘛的呀?同学们, 来,我把动画往后退一点,各位,中间装齿轮的,他中间装齿轮的,所以他的齿轮的位置是需要谁来做支撑的?是不是需要靠这边这个右边的轴承和左边的轴承位?只有他们两个共同支撑完了以后,才能够保证他的准确度?所以对于齿轮来说,他的安装环境是什么状态? 是不是他跟没有直接和我们的相体做接触,大家相反,他需要轴来传递精度,保证齿轮的裂合,对不对?所以他在这里他的同轴度就必须要标注到 a 杠 b 了,那这是 b 面,这是 a 面,对吧?两段做支撑,然后呢,中间跳动不能太大 啊,这同轴的部分啊,测量的方式之一啊。来呢,就是这样的公话,假设现在两边这边是轴承,这边也是轴承,那我中间装个齿轮,如果我齿轮同轴度不良,他是这样晃,你们觉得这个传动能行吗?直接给你干憋死 对不对?你看,如果我尺子是这样画的,肯定肯定不行的,对不对?所以我们标注行为公差,一定一定要看需求来啊,一定一定要看需求来,所以呢,标注的方式呢?和我们这个动画其实很相似的 啊,使用的时候,哎,是用的这个机准,我设计的时候是用的这个机准,加工的时候,事实上我也需要考虑这个机准,测量的时候,哎,我也需要考虑这个机准,这就是真正意义上的我们说的这个叫做什么呀?多合一啊,整个环节里面都围绕这个图纸的机准去做所有的事情, 明白了吗?那这就是我们的在实践案例过程中同轴度的基本应用。好的,这节课呢,我们就先讲到这啊,我们呢下节课再讲。
2575阿左SolidWorks免费学 03:29查看AI文稿AI文稿
03:29查看AI文稿AI文稿今天我们来聊聊工信部刚印发的工业互联网和人工智能融合赋能行动方案,这可是个能改变企业和我们普通人生活的重要文件。先说说这方案的目标,到二零二八年,要让工业互联网与人工智能融合的更厉害, 会有不少于五万家企业进行新型工业网络改造升级,还会在二十个重点行业打造高质量数据级。简单来说就是要让工业更智能,企业更高效、经济更有活力。 那他具体是怎么干的呢?主要是通过四大行动。第一个是基础底座升级行动,这就好比盖房子,得先把地基打牢。方案提出,要让工业网络更智能,支持企业用五 g 工业光网等技术,让网络像聪明的大脑一样,让自己足网 管理、优化和修复。还得强化工业智能算力供给,就像给工厂配上更强大的电脑,让数据处理更快。比如说一家汽车制造企业,以前设备之间通信可能很慢,现在通过升级工业网络设备能快速对话,生产效率就大大提高了。 第二个是数据模型互通行动。数据就是工业的石油,很珍贵的方案,鼓励企业建立数据可信流通空间,让数据能在产业链里共享流通。还得打造高质量数据集,开发各种工业模型。就像一家服装企业, 通过汇聚生产、销售等数据,利用模型分析,就能知道消费者喜欢什么款式、颜色,按需生产,减少库存积压。第三个是应用模式换新行动,这是要让工业生产和运营模式大变样了, 鼓励企业利用工业互联网和人工智能实现平台化设计、智能化生产等。比如一家钢铁企业,以前设计新产品可能要好久,现在通过平台化设计,借助人工智能算法,能快速设计出更优方案, 还能打造虚拟产线,提前模型生产,节省成本和时间。而且方案还鼓励前沿技术落地以后,工业机器人可能更聪明,能自己感知和决策,不再是傻傻的按程序干活了。 第四个是产业生态融通行动,就是要把相关企业和资源聚在一起,形成一个强大的产业生态支持工业互联网解决方案供应商变得更智能化 化。更多行业级解决方案供应商还会加强产融合作和产教融合,培养更多相关人才。比如说一些中小企业自己搞智能化改造可能很困难,有了这些解决方案,供应商就能花更少的钱得到专业的服务,轻松实现升级。 那这个方案对我们普通人有啥影响呢?首先,生活可能会更方便了,以后家里的智能机器人可能更能干,能做饭打扫,还能照顾老人、能交通管理系统会让路上更通畅等,工作时间可能更少。其次,工业智能人也会变化了, 传统制造业一些简单重复的岗位可能会减少,但会出现很多数据分析、人工智能、算法开发等新岗位。所以啊, 咱们得不断学习提升技能,才能跟上时代步伐。总之,工业互联网和人工智能融合不能行动,方案就像一把钥匙,打开了工业智能化的大门,会给企业和我们的生活带来翻天覆地的变化,让我们一起期待吧!
 16:26查看AI文稿AI文稿
16:26查看AI文稿AI文稿我们看一下第三章运动,我们要控制工业机器人或者是机械臂的运动,要建立它的一些坐标系, 然后呢研究各个坐标系之间的一个运动关系啊,从而呢对它进行相关的一个控制,所以它的运动学的一个关系呃是比较重要的一个基础。那么 运动学研究包含哪些问题呢?该如何解决呢?那么看这个坐标系啊,这坐标系呢,共有很多记忆坐标系,大地坐标系,空间坐标系,它的一个工具坐标啊,这里的屁呢代表的是一个目标点, 我们运动学的问题主要研究位于时间的一个函数啊,这里呢关节的还有末端执行器的一个位姿呢,是标准。所谓的位姿是什么?就是位置和姿态啊,位置的动流动啊,姿态呢,旋转的, 那么这么多的坐标系,它是并不统一的,我们不可能将一个点啊,在多个坐标系进行, 然后进行一个求解,所以说最后呢,我们就要将啊这个点目标点的一个呃姿态呢,要放在同一个坐标系进行,那这个时候 就需要我们引入啊,一个棋子坐标和棋子变换来满足啊,他最终的一个目的, 我可以看一下他这个本小章,然后讲解了一下四部分内容,这四部分内容呢,也是分别存在一个递进的一个关系。我先咱们看一下第一部分内容,一部分内容其实就是引入这个 a 坐标 啊,然后呢介绍一下啊,动作要细啊,对象物的未知的一个描述啊,但是这边我们可以从点向量啊,以钢体 哎进行一个讲解,那第二小节呢,就是让奇字变换,我们在了解这些概念了,以及它的一些基础的一个表达以后呢需要对它进行一个奇字变换 啊,奇字变换学会了以后呢,接下来我们就要应用到这个工业机器人一个领域,我们知道机器人当中呢啊,主要是有这个连杆,还有关节末端执行器啊等 形成,那这个连杆的一个描述,包括他的一个气色变换矩阵啊,就是未来我们要求解这些运动学方程的一个重要的一个东西。 紧接着呢我们就看一下啊,最后呢就需要组装什么呢?我们这些人运动学方程,并且呢要对他进行一个求解,那这里呢运动学方程分为两大类, 第一例呢就是一个正运动学的一个问题。第二例呢就呃逆运动学的一个问题,那正运动学主要就是以知我们各关节的一个运动角度啊,了解啊追踪的末末端的执行器的一个未知。 然后逆运动学呢就是反过来,嗯在工程当中呢需要啊知道这个末端执行器要怎么走这个路线是知道的。我反观 反过来呢,理解他的一个各关节要啊转动的一些角度啊,当然其他的一些参数他也有,但是其他参数在设计的时候呢啊,已经都确定好了,所以主要就是还是看关节转动的角度, 我们看三点一啊,点,哎,坐标轴啊,东坐标系也对向物位置的一个起坐标描述啊,首先我们看一下点的是叫坐标描述,那点三维空间当中点就是有这个点在 x、 y、 z 三个坐标组的一个投影来描述,那就是 s p y p z, 这个非常简单的,那我们再考虑一个问题啊,如果三维的空间能用 n 加一维,就是四维的空间来表示呢? 啊?可不可以啊?那当然是可以的,这次就是这次就是其次坐标啊,用这个其次坐标来描述 啊,那我们看一下它的奇数标描述呢,是非常简单,就在后面又加了一尾,然后加了一个一, 当然这个一呢,不是唯一的啊,我们可以将个元素同时乘一个非零, omega 以后,其实还是代表这个点,就跟我们之前小学的时候学过工业数式对它进行一个 啊化,化解以后呢,这个还是表达的是同一个点,但是我们认为这种表达形式后面是一的表达形式,是一种标准化的。 然后我们看一下坐标轴方向的一个七次坐标描述啊,这个就是我们知道,如果没有七次坐标描述呢啊,那他就是前面这个三维的 i j k i 轴呢,就是 i 等于一啊, y 轴呢,就是 j 等于 k, 轴呢,就 k 等于用这个方向呃向量来表示,那如果是其次坐标描述呢,后边加个零就可以,这是我们会发现点的描述呢,是后面加一 啊,坐标轴的描述呢,后边加零,那如果后面不是零,那是啥意思?我看一下啊,就是它就代表的是一个空间的一个向量,就说明这个不在坐标轴上了啊, 然后对应的这个 v 呢,比如说这个 v 向量啊, abc 零啊,这个时候呢,我们就需要把它什么呢?这个 abc 分 别进行一个求解。那么其实就是啊,这个 v 向量呢,分别,对啊, x, y, b 啊,角的余弦值就是它的 abc 啊。 好了,有了上述的这个关系呢,就可以用这个其坐标写出 u v, w 的 一个方向列阵啊,我们发现 u 和 v 呢,都有个九十度,那九十度就代表呢,它是在有一个平面上,或者这个 u 在 y z 平面, 呃, v 在 x z 平面上啊,那如果没有九十度,说明它是一个空间的向量。直接对它进行一个求解,就可以看出 这个 cosine 阿尔法, cosine 贝塔, cosine 伽玛,这个表达出来,我们对它进行一括弧列啊,然后后面再加上一个列,就会写出它的一个起始坐标, 然后我们讲解一下这个动坐标系的位置的起始坐标表度,它这个是连杆的位置和姿态的描述,于是它就是一个晶体,那晶体我们知道有六个自由度,当个动,当个转动啊,那么 只要知道了这个缸体的一个呃,原点的一个位置,点的一个位置,还有他的一个三个坐标轴的一个姿态,那么我们就可以对这个缸体位置就是位姿进行一个约定。 其实这个动作标系呢?哈,就是啊,这个钢铁或者叫连杆吧,在它上面建立这个坐标系,就是这里面叫 o p, x y 撇 c 撇,它是个动作标, 然后这个 s, o, y, z 呢,它只是一个净坐标系,那么这个描述呢,其实就相对于净坐标系进行描述。那首先我们看一下这个 p 啊, e 呢?啊,它的,我们先看一下这个吧,看一下它的坐标形式呢,其实就是一个 o a p 来组,那 o a 是 什么呢? o a 呢?就是说,呃,在这个动作表系上的它的一个方向矢量, 然后呢再加上一个 p 啊, p 就是 表示它位置的一个呃矢量, 然后我们要描述这个纲体,所以我们先要确定这个呃它的一个位置,它这个位置其实就是这里头呢,就是一个 o 撇的一个位,圆点的位置,那圆点的位置呢?在这个 s, o, y, j 固定坐标系下的一个描述呢?点 y, 点 a, 点为 e, e 是 什么呢?就是点嘛,其次坐标后面要加一个 e, 然后呢我们看一下 n o, a, n 呢,就是 n, x, n, y, n, z 啊零,它们什么意思呢?分别代表, 那么也代表的是我们这个 x 和呃初时的坐标系,参考坐标系,它的 x 的 呃夹角的余弦, 还有这个呃 n, y 呢,就是就是这个 n 轴, n 轴就是 x 轴,就是这个向量和 y 轴的啊两角的余弦,然后 n, z 呢,就是这个跟 呃这手的夹角,相当于将他呃投影到这个参考坐标系当中啊,他们的一个夹角与弦同理呢,这个 o 呢,就是呃外撇,就是这个外撇轴投影到分别投影到 x 啊, 还有 y, z 啊,加掉等于它的向量 o, x, o, y, o, z 后边加零,那就是向量的一个表示嘛,坐标轴的一个表示,就是后面都需要加一个零,最后我们就可以呃组成这样的一个形式, 这个就是他的一个动作标,呃动作标系未知的一个,其坐标的一个描述。呃,我们可以看到啊,这个这个部分表示的是这个纲体的动作标系,他的一个 姿态啊,这个相当于说他的一个位置。我们看个例题吧,从例题的角度可以看的表情, 假如这么一个连杆啊,这个连杆呃不连与坐标系 b 啊, 我们就简单的说一下,就是说,呃, x, 这个 o o c 呢,就是 x o y z, 这个坐标系呢,它是一个固定坐标系,比较参考坐标啊, 然后呢还有个 b 系,那这 b 系呢?就是 x b y b z b 啊,它是一个在呃固联与连杆的一个坐标系,它其实是一个动坐标系, 然后这个坐标系呢,相对于这个呃固定坐标系呢,它有一个三十度的一个偏转 啊,那么这个 o b 点,他这个圆点呢?啊,这个位置啊,是二一零,就相对于这个固定坐标系,他是二一零,他是这个是已经确定好的。那这个时候呢,我们首先把圆点这个这个点,其次坐标先写出来,那他就是一个 p, 等于二一零 e 啊,就这么一个情况。然后呢我们就可以求分别,求我们知道那个 t 的 其坐标形式呢?等于 n o a p, n o a p 啊,那 p 我 们知道的放在最后,最后写就完事了。那么这个时候要求什么呢? 有 n o a 啊,怎么求?那么可以看一下, n n 就是 什么呢?就是 x 轴,这里边就是 x b x b 和什么呢? na 的 夹角,就跟这个固定坐标系 x 的 夹角,那这个时候我们也可以看,它是三十度,就是 cosine 三十度的余弦,对吧? 然后呢?这是然后这是 n y n y 的 话,就是说 x b 啊,这个跟 y 轴的一个夹角,那 y 轴夹角我们可以看到,因为这是三十度,它平移过来,这个我是九十,这个位置就是六十度, 他俩夹角就是靠在六十度,你注意一下方向啊,这个要以矢量这个方向,如果矢量是这个轴朝那头变了,这不是六十度,一百二十度了, 然后靠在九十度是怎么回事呢?就是他跟这种这种,因为他是在 x o y 的 平面上啊,所以跟他是垂直的,他是靠在九十,那分别求解就求出来后边加个零,可以,那 o 也是一样的,那 o 是 什么呢? o 就是 y y b 这个轴啊,跟 x 的 一个加角。 y x 加角是多少呢?我这里看呢,它是 cosine 一 百二十度啊,意思就是这个加角,这个是这个,那它这是九十度,这是三十度, b 加啊,这 cosine 一 百二十度, 然后呢它跟 y 的 一个加角,那 y 是 这样平移过来,这样它就是三十度,同样它也是在这上面也是九十 啊,那 z b 这块呢啊,也是同样进行一个求结就行,因为它是跟这个原始的对轴是平行的一个关系,所以说它就是啊零零一,这样的话,我们就组装这个 呃,连杆位置的一个啊,梯子变换的一个描述,就是这个矩阵, 我们再看一下手部位置姿态的一个描述,它也是一样的,首先呢我们要知道一个参考坐标系,然后呢还要有一个在手部的位置要设定一个动作表系啊, 通常呢这块呢就是呃,在它这个中心的位置设置为圆点, 然后 j b 呢,则是为这个关节的一个方向啊,它是朝外的一个方向作为 j b 啊,然后那个两手的连线啊,就这个牙的这个连线定义为外 b, 那 x b 呢,我就通过这个右手定折,然后来确定就行,当我们确定了它这个原点,还有它这个动坐标系以后,我就可以用 t 等于 n, o, a, p, 然后进行一个组装, 它就是它的一个其次坐标的一个表述啊,剩下的我们就分别对它位置来求解啊,然后就可以, 比如说这个啊,物体是变长为二的正方体啊,也是该首位置的一个矩阵表达形式。首先我们看一下它的原点位置,因为它是二单位,都是二的一个正立方体,所以说它中心的位置一后边的,因为是点,后边加个一, 然后呢 n 呢?就是把这个角度 n 和这个原始的角度是多少度?比如说我们这个 n 啊,跟原来的这个 x 它是垂直的关系,不就是 然后这个 n 跟 y, 因为它是反方向的一百八十度, 然后 x 和 z 它也是垂直关系,那就是也这个就是这样把 n, s, n, y 和 n, z 就 读出来了,然后放到这个位悟着写放到这个位置就可以了,那同理 o, x, o, y, o, z, 求下以后放这,然后这个 a, x, a, y, a, z, 然后放,读出来以后放这,最后呢补充一个零,然后就把这个矩阵解出来了 啊。当然呢还有一种表达方式呢,就是用坐标点每一个位置的一个坐标点进行标注, 当然也是可以的,但是我们主要在工业机器人的领域来讲,还是要通过这个其坐标变换来进行标注。
24好运仿 04:23查看AI文稿AI文稿
04:23查看AI文稿AI文稿朋友们,今天我要告诉你一条藏在专业新闻里的黄金赛道。中国石油在新疆投产了五点八万吨 poe 生产线,这种被称为工业黄金的巨吸听氮烯体, 正在撬动千亿级新能源产业的命脉。你可能觉得这只是个普通的技术突破,但当我们用投资人的放大镜看获取百分之九十五的 poe 依赖进口,意味着每块光伏板、每辆电动车的核心材料命脉都攥在别人手里。而这条产线的落地,直接刺破了这个困住中国新能源产业二十年的材料枷锁。为什么说这是工业黄金?光伏板要在沙漠暴晒二十五年,全靠 poe 胶膜像液态盔甲锁住发电效率。 新能源车要减重增续航, p o e 就是 让电池组轻量化百分之三十的隐形骨架。更关键的是,当国产 p o e 把成本拉低百分之二十,整个光伏产业链的利润池将重新分配。但更精彩的在后面。 第二层逻辑是技术换道。这次我们突破的是国际上更先进的气象法工艺,和国外主流的工艺相比,咱们这技术更绿色环保,综合能耗直接降低了百分之四十,这可不是小数字。在双碳目标的大背景下,我们不仅能自己生产 poe, 还能拿出更低碳、更环保的产品。 这意味着什么?意味着我们有机会去定义未来的全球行业标准。这带来的不仅是成本上的优势,更潜藏着绿色议价和掌握定价权的巨大可能。 所以,聪明的资本眼光绝不会只盯着生产 p o e 的 那一两家公司,大家更应该沿着整个产业链上下游,去扫描,那些为 p o e 生产提供核心催化剂特种设备的公司是不是迎来了黄金期?还有那些率先采用国产 e o e 来制造高端胶膜,并且成功验证了其性能的光伏组建企业,它们的价值会不会因此被市场重新认识?这条五点八万吨的产线,就像一把钥匙,正在打开一个充满机遇的千亿级新世界的大门。那么, 作为一个重量级的技术工业化突破,背后需要什么样的人才?答案很清晰,是一类极度稀缺的跨界枢纽型人才。他们早已不是我们传统印象中的石化工程师了,我更愿意称他们为派型人才。他们的一只脚必须深深扎根在高分子化学、催化工艺这些深奥的基础科学领域里, 而另一只脚则必须稳稳地踩在光伏、新能源汽车这些充满活力的下游应用市场前线,他们横跨两岸,是真正的连接者。那么, 具体是哪些关键角色呢?第一类是公益放大专家,他们是能把实验室里那几颗珍贵的样品稳定高效、 低成本的变成万吨级工业产品的灵魂人物。这类人才既要懂微观的分子结构如何影响性能,又要精通宏观的反应器设计、流程控制与工程优化。第二类是应用开发向导, 光是把先进的 p o e 材料造出来是远远不够的。你得有能力告诉光伏厂、汽车厂这些下游客户,用我的新材料,你的组建效率能提升多少?你的电池包性能能增强多少?你的整体成本又能优化多少?这类人才必须同时吃透材料本身的特性和终端产品的设计需求、制造痛点, 他们是打开广阔应用市场、赢得客户认可的金钥匙。第三类是更前瞻的绿色公益工程师。随着气象法这类更环保、碳的技术成为主流趋势,那些精通绿色化学原理、 能持续优化生产工艺的能耗、减少排放的工程师价值将日渐凸显。他们不再仅仅追求效率和成本,更着眼于整个生产周期的可持续发展的核心资产。 国产 poe 的 突破是一场硬仗,但也孕育着巨大的机遇。这给所有关注人才动向的人提了个醒,高端制造业的人才地图正在被彻底刷新,人才争夺的焦点,正悄然从过去单一的互联网算法人才身上转移,转向这些懂科学、懂工程、更懂产业的复合型大脑。 谁能找到并拥有这些派型人才,谁就掌握了驱动下一次产业跃升的关键引擎。当我们突破这层材料节俭,中国新能源产业才真正握住了通往万亿市场的钥匙。 我是 vc 猎手,习惯用投资的眼光穿透趋势迷雾,用猎头的视角精准挖掘深层价值。在国产替代这场深水区的攻坚战中,你认为下一个像 poe 这样具有突破性、意能引爆一个细分领域的机会,会出现在哪个方向?评论区,我们一起聊聊,碰撞出更犀利的洞察。
29VC猎手 23:42查看AI文稿AI文稿
23:42查看AI文稿AI文稿然后我们得到了这个坐标系之间的一个变化呢,我们就可以对工业机器人运动学的方程进行一个求解。那么首先看到这边有第一个我们要组建机器人运动学的一个方程啊,然后呢要求解它的两大类问题 啊,一个问题呢就是正向运动学方正求解,另外一个就是反反向的运动学方正求解。那正向的运动学方正求解呢,就是我们已知呃各关节旋转的一个角度啊,求他呃手部的一个位置啊, 那反向呢,就是我们要根据现场的一个情况,我们知道了他的一个位置应该怎么变,或者是到达哪个位置啊。然后我们反求他各关节需要怎么进行一个转动啊?大概是这么个流程。 嗯,首先我们先看一下机器人的运动学方程啊,这里头呢,我们可以看到啊,就是先引入了一个概念叫 a 矩阵啊, a 变换矩阵是什么呢?描述一个连杆坐标系与下一个连杆坐标系间的相对关系,相对微子在。 其次变换矩阵啊,那这个其实我们在刚才的推导过程当中呢,已经进行了一个推导,就是各种圆转移动啊,用这个延改参数就是进行换算得出它的一个。其次变换矩阵啊,呃,这里头我们可以看一下, 呃,这个是 t 一 呢, t 一 呢,就相当于说我们这个一系啊,将对于固定坐标系的一个呃变换。其次变换啊, 呃,因为是呃固定坐标系,所以说这个呃 a 一 呢,它是呃要左层的一个关系啊 啊,但是我们在这个固定坐标系当中啊, t 零呢,它是一个单位整,所以这块我们可以对它进行一个省略,也是在这个 t 一 呢啊,就等于 a 一 啊, 那 t 二呢,其实就是相当于说我们呃二系啊,就是第二个连杆嘛,就是二系相对于呃零系嘛,就是它的一个参考坐标系的一个呃,未知的一个情况啊,那它 由什么呢?它由这个呃 a 一 和 a 二连成得到的啊?这个时候因为它是相对于它的那个洞悉了,所以说我们需要有一个又成的一个关系,那就是 a 一 又乘以 a 二 啊,就是这么一个关系,那 a 一 呢,就相当于一系,呃,相对于参考这个系的一个七次变换,那 a 二呢,就是二系相对于一系的一个呃七次变换矩阵啊,它们相乘,那就是二系相对于一个参考 啊的一个七次变换矩阵啊,大概是这个意思。同理呢, t 三就应该等于 a 一 乘以 a 二乘以 a 三 啊,我们这里边的这个 a 矩阵呢,其实就像是接力棒似的啊,呃,每个连杆的 a 矩阵描述的自身让对于前一连杆的一个 未知变换啊,把这些 a 矩阵依次相乘呢,就能得到从初时坐标系到机器人末端的一个最终位置啊, 啊,同底呢,一般我们比如说有呃六个啊,都要细,那我们这个时候呢,我们相当于说呃用 a 一 乘到 a 六 来表示啊,他就是首部坐标系相对于固定坐标系的位置啊,就是等于呃首部坐标系相对于固定坐标系的一个位置,就是这个 t 六的一个描述,它等于什么呢?等于各个连杆坐标系之间的变换矩阵连成啊,就是每个相邻的连杆之间的一个 变换矩阵,就是 a 一, a 二, a 三,一直到 a 六啊,这个关系呢就叫做机器人的运动学方程。 那我们的 t 六怎么表示呢? t 六就是跟上述的奇次变换的描述方式呢,比较像,它就是,呃,由 n o a 啊,单列以及这个 p 啊第四列组成,其中呢 n o a 三列呢,它是一个未知的一个变换,那 p 这个列呢?它是移动的一个变换 啊,这个就是它的一个机器人运动学方程, 然后呢,得到方程以后呢,我们就可以对它一个运动学方程进行正向的求解啊,那求解是什么呢?我们在前面也说过啊,就是已知呢 关节变量 c 塔和 d 啊,求首部未知量的 na 和 p 啊,就能得到首部的一个未知。 嗯,这里头呢举了两个例子,一个是平面关节型机器人正向运动学的一个求解,那另外的一个是斯坦福机器人正向运动学方程的一个求解啊,我看一下这个例题 啊,第一个例题呢就是,嗯,平面关节型机器人正向运动学方程的一个求解。呃,看一下他这个组成啊,这是他的一个 a 图。呃,首先呢,我们可以知道,呃要建立什么呢?建立他的一个坐标系, 然后还有他一个连杆的一个参数,那么这里见坐标系本着一个原则,第一个原则呢,我们这个零系啊,是建立在这个,呃第一个关节上啊, 然后一系呢,是建立到连杆一和连杆二连接的这个,呃,第二个关节上就是这个一系,然后那个二系呢,就是连杆二和连杆三啊, 呃,连接的这个连杆三上的这个关节啊,是二系啊,那因为没有第四个连杆啊,所以说他这个战系呢,我们建立在他这个呃末端的执行器的中心这个位置啊, 这样的话我们就把这个坐标系啊全建立下来了。建立下来以后呢,我们要确定他的呃方向啊,比如说,呃这是一个平面的,所以说我们这个坐标系的方向呢,呃, 这呢就是沿着呃这里头来看的话,就是呃垂直于这个屏幕啊,他是这个走线的一个方向啊,然后呢公垂线的方向呢,就是 x 一 的方向,由一杆啊 指向于二杆啊,二杆指向于三杆朝着向右的一个方向。而 y 呢就是根据右手定折进行一个呃定制就可以了啊, 呃,然后呢就是它的一个参数,我们公垂线的方向参数我们可以看到就是连杆的一个长度啊, a 啊,就是一百一百二十啊,这个三个连杆之间就是这么一个关系, 然后那个转角,转角呢,就分别是 c 塔一、 c 塔二和 c 塔三啊,它是转角 呃连杆的一个牛角,还有连连杆间的一个距离, d 啊,他们都是零,因为他是一个平面关节型的机器人啊,没有相对一个扭转的一个情况 啊。我们再看一下啊,写出他运动学的一个方程,那他就是 t 三啊,等于 a 一 乘以 a 二乘以 a 三啊, 然后呢我们要分别计算 a 一、 a 二和 a 三啊,它它的一个四乘四的一个变换矩阵,然后得出来以后呢,它们在相乘啊,就得到最后的一个 t 三,然后再把这个 c 叉一, c 叉二, c 叉三进行一个代入啊,延取一个固定的数值 啊,我们就可以得到它最后的一个呃,首部相对于固定坐标系的一个未知是什么情况啊? 这里头呢,我们就可以看一下啊,呃, a 一 a 一 是绕着 z 零轴旋转 c 叉一啊,然后再呃沿着 l 一 进行一个平移啊, 然后 a 二呢,就是绕着 z 一 轴旋转 c 叉二,再绕着 l 二进行平移,然后 a 三呢,就是 z 二, 然后 z 二走旋转 c 向三,然后再移移 l 三啊,这里边从这坐标系我们也可以看出来啊,大概就是这么一个趋势啊,一一旋转一平移,一旋转一平移就能得到,呃,就能跟呃下一个坐标系进行一个重合啊, 然后大概就是这个样子的一个矩阵啊,最后呢,我们就可以得到 t 三的一个表述 啊,那 t 三表述呢?这里边有这个下标一二三还有一二分别对应的是啥意思啊?比如说 c 一 二三就是 cosine c 叉一加 c 叉二加 c 叉三,那三一二三呢,就是 cosine c 叉一加 c 叉二加 c 叉三, 还有这个 cosine 一 二和 c 叉一二啊,大概的表征用这个形式写起来会更加的一些方便 啊,我们再看一下这个斯坦福机器人,一个正向运动学方程,求解,那它这个相当于刚才那个要复杂一些啊,那这个连杆参数啊,呃,四个,这个 d h 参数呢,相对也比较复杂。 那首先也是一样的,我们要建立它的一个坐标系,那这个 b 图呢,就是根据它原始的一些关节还有连杆的数量啊,我们可以建立这样的一个坐标系, 建立完这个坐标系以后呢,我们需要把这个呃它的 d h 参数呃列表显示出来啊,比如说那个杆号啊,总共是六个杆,然后每个关节进行一个转角, z 它的一个旋转啊, z 大 一, c 大 二啊, c 大 三是等于零,我们这边就固定的给出来就可以了,因为它是一个纯移动的啊, 然后是牛角 r 法啊,大概是多大的这块我们能给出它具体一个数值啊,有的九十度,有的负九十度,还有的是零度 啊,赶叉呢,我们这里头都是赶叉, a 这里头都是零啊,距离呢?就是有的地方有距离,有的地方没有距离,这也进出一个啊,标注了啊,就第二第三和 h, 那 有了这个 呃连杆参数呢,以及这个坐标系的一个表示以后呢我们就可以做他的一个呃变化了,列出运动学的一个方程啊,就是 t 六嘛,啊,就是末端是六啊,六系相对于参考坐标系 啊,它的一个呃变换啊,就等于各点杆之间的变换的乘积呃,我们需要需要分别求出 a 一 到 a 六啊,那其中 a 一 呢 啊,就是先绕着这两轴进行 c 加一的一个旋转,然后因为它有一个阿尔法的一个扭转角,所以说它是呃跟 x 轴是相关的,所以再绕着 x 轴进行一个旋转啊,就能得到这么一个 c, 然后那个 a 二呢,就是看这个 b 啊,它也是一样的,它首先呢呃是有一个旋转,然后说这个这自身的这个这轴进行一个旋转,旋转完了以后呢,我们要对它进行一个平移啊,平移完了以后呢,还需要哦, 通过这个扭转角,然后来呃处理,最后得到一个四乘四的一个矩阵。 a 三呢,也是一个道理,因为它没有旋转,所以这头呢只有一个平移,一个 d 三啊就上去了,然后紧接着就是这个呃 a 四 a 五 a 六啊的求解 啊,这里头呢也是 a 四沿是圆转 c 叉四,然后再呃然后 s 轴进行一个阿尔法四的旋转 啊,这都是一样的,类似的这里就不讲解了啊,这个最后呢是要平一个 h 的 一个距离啊, 当 a 一 到 a 六都求出来以后呢,我们就能得到最后的啊,六系相对于零系,呃,等于它们之间相乘啊,得到这么一个运动学的一个方程, 然后对他进行一个求解,然后就可以得到我们想要的一个呃,末端啊,手部的一个位置,他也是一个自省式的一个矩阵啊, 然后我们再看一下反向运动学方程的一个求解,那反向运动学的方程求解呢?其实呃 他的定义是什么呢?就是根据首部要到达的目标位置啊, n o a p 啊,相对而言这个目标位置是给出来的啊,然后我们反求他的关节变量 c, 他的 d 啊,以驱动各关节的马达,使首部的位置得到满足啊。 这里头我们也简单看一个例子吧,这样呢会比较直观的 啊,这就是刚才这斯坦福机器人反向运动学的一个求解。呃,它的运动学方程是这个啊, 然后 t 六矩阵呢,我们知道了啊, a f r d, 因为设计的一些参数的时候,我们知道它的就已经确定了,所以我们就不用管 啊,那我们要求的就是关节啊, c 他 一, c 他 二,还有 d 三及 d 他 四和 c 他 六啊,大概要求这个关节的呃旋转的角度啊,以及他如果是移动关节的话,要求介他移动关节的一个距离。 那怎么求呢?我们通常是呃一个一个求,比如先求 c 叉一,那我们就可以呃在 t 六的前面啊,左乘一个 a 一 的逆, 这样的话我们就得到呃,相当于是六系相对于一系的一个啊,变换矩阵啊,然后这头呢,是各个连杆之间的变换矩阵相乘的一个关系啊,我们这个位置呢,能够表征出来为已知, 然后 a 二到 a 六,我们也可以对它进行一个表征,又得到是这么一个公式,然后我们 因为这个两个矩阵是相等的,所以说啊,每个元素他都应该是相等的一个关系啊,我们通过啊,第三行和第四列啊,这个位置 和这个第二啊,我们能得到这样的一个关系式,就是负的 p x s 一 三一加上这个 p y 啊, cosine c 大 一原等于第二啊,然后我们通过这个关系以后呢, 我们就可以对这个 c 大 一进行一个求解啊,呃,求解相对还是比较繁琐,但是是最后呢,我们推导出来就是等于 c 大 一等于 arc tangent 啊, y 比 ps 减 arc tangent, 第二啊,比上正负杠下 r 方减第二的一个平方啊, 因为我们其他的值都是已知的,所以说我们的 c 叉一就可以求出来这个正号呢,对应的右肩那个位置符号对应的就是一个啊,左肩的位置,因为它第一个关节是肩部的一个运动嘛。呃,求完 c 叉一以后呢,我们就可以求 c 叉二, 那 c c 二也是一样的,我们重新要再乘一个 a 二的一个逆啊,最后我们就可以得出这么一个, 呃,这个我们不乘以 a 二的逆啊,刚才说错了,这个就是我们,呃,还是刚才这个 啊,只不过这个时候呢,我们不用这个第三,呃,第三行第四页啊,我们用的是第三行,呃,第一行第四页和第二行 第四列,那么用这个两个关系式来连立啊,最后求得这个 c 大 二啊,就等于 ark 碳金它 cosine c 大 一啊。 ps, 加 c 大 一 p y 比上 p z。 因为我们这个 c 大 一已经求出来,所以我们 c 大 二呢,就可以进行一个求解, 然后我们就继续求这个 d 三啊,还有求这个 c 叉四,那求 c 叉四的时候,我们这块要啊,对他前面乘一个 a 四逆啊,大概就是这样的,我们,呃可以一个进行一个消去, 呃,乘完以后我们比较两边的一个啊,对比情况啊,这样的话我们就可以 呃能找到一些解啊,比如说我们这个用 c 叉四的时候啊,乘以 a 四的逆以后啊,展开后取左右两边第三行和第三列相等啊,这个时候我们就可以求出这个 c 叉四啊, 接着我们求这个 c 叉五,也是一个道理,我们就乘以 a 四的逆啊,然后 t, 呃,六到三啊,等于 a 五乘以 a 六啊,同时呢,我们呃取展开后啊,左右两边第一行第三列相等啊,第二行和第三列相等。一般是取两个方程建立这个方程组,然后连力求解,可以求出它这个 c 叉五 啊,最后呢,我们再乘一个 a 五的逆啊,等于 a 六,这个时候我们就可以展开后取左右两边第一行第二列相等啊,第二行和第二列相等,最后连立以后求出来 c 它六呢,就等于 arctangin 的 三 c 它六, a cosine theta 六啊,那得到这么一个值。呃,然后呢,我们就是相当于把所有的关节的一些参数都求完了啊,这个时候基本上它的一个樊结就求出来, 呃,我们可以看见他求反解的一个方法,这里边采用的是叫分离变量法啊,它是将一个未知数由矩阵方程的右边移向左边啊,使其与其他的未知数分开,也出这个未知数, 再把下一个未知数移到左边,重复的进行,直到结束所有的未知数。那分离变量法的一个特点呢?它是首先,呃,利用了运动方程的一个不同形式 啊,找出矩阵中能够简单表达某个未知数的一个元素啊,力求得到未知数较少的一个方程,然后进行一个求解, 然后我们在反向运动学方程求解的时候呢,我们要注意啊,第一个呢,我们就是他的解可能不存在啊,比如说我们呃给他,他想让他这个未知到达一个地方,结果我们发现他超过我们工作的一个域 啊,这个时候他的逆解是不存在的,就是无论你怎么运动,他是到不达,到,达不了你所想要的这个呃位置和姿态。 第二个就是他的解可能是有多重性,不是唯一的啊,比如说我们这个图可以看出来啊,他并不是一个唯一的解啊,他的解有很多,可以是上边也可以往下走啊, 最后都可以到达他的一个呃这个未知, 比如说我们这个多重性的一个结啊,匹马五六零机器人的四个逆解啊,就是同样要到达这个末端执行器到达这个呃位置呢啊啊,他这个几个关节的摆动可以使这种四种形式, 然后我们看一下它解的多重性的一个好处啊,它就是可以避免碰撞啊,我比如说我们有两个解或三个解啊,但是 有一些结呢,它是能够呃避开这障碍物,但有些结它是要碰到的障碍物,那这个时候呢,我们需要将呃不合理的碰到障碍物这个路径啊,就给他这个结呢,给他取消掉,保留这个最优的一个结啊。 然后呢我们这个求解方法呢还是比较多样性的呃反向求解当中一般用两种方法,第一种呢叫解析法啊,它适用于简单的运动学方程,太复杂以后它就很难进行一个求解 啊。第二个就是数值法,数值法就是用一些方法来寻思等效于真实的一个解啊,它是适用于复杂的应用学方程,嗯它的计算速度相对比较快,然后也能保持比较高的计算精度 呃相对而言的话更适用这个复杂工程。那最后呢就是我们就我们这个运动学这个专题啊进行一个总结 啊,我们这张呢哈讨论了机器人坐标系及其位置在坐标系的一个描述啊,给出了其四坐标及其变换的定义, 并对机器人位置进行其坐标的描述和分析啊,那进一步探讨了联感坐标系的建立及描述坐标系的这个 d i d h 的 参数啊,进而表达了联感坐标间的一个坐标 变换矩阵啊。最后介绍了正运动学和运动学的概念,并用实力的形式呢讨论串联机器人的正运动学和运动学的计算问题啊。 那以下主要几个思考的,第一个我们就是点的七十坐标描述是什么啊?还有方向的七十坐标描述啊,坐标系的七十坐标描述 比这个平移和旋转的七十坐标变换啊,左层和右层的一些规则包括什么是连杆参数以及连杆坐标系的一个建立。 还有最重要的就是串联机器人的运动学求解方法啊,包括他的正运动学求解方法以及他的逆运动学求解方法。 那我们这个第三章关于工业机器人运动学的部分呢,我们就讲解到这里,感谢大家的收看啊,再见!
33好运仿 04:23查看AI文稿AI文稿
04:23查看AI文稿AI文稿狗胆包天,日本防卫省发布的一段三 d 动画,将正在研发的新型导弹与机沉零五四 b 护卫舰的画面直接挂钩。这一超越常规军事宣传的挑衅行为,央视新闻以蔑视姿态博制。这一举动为狗胆包天。 下面我们用技术的放大镜逐层透视其幻想为何注定破灭。动画预设的前提是导弹能够隐蔽突防,悄然接近目标。 然而,在现代海军构建的海空天网一体化侦查预警体系前,这一前提难上加难。 其导弹本质仍是亚音速巡航导弹,这意味着它具有飞行时间较长、轨迹相对固定的物理特性,在其飞向目标的漫长轨迹里,将暴露于多重天眼之下。海洋监视卫星、 遥感卫星构成星座网络,能够对广阔海域进行持续扫描与定位。以空警五百为代表的新型预警机 搭载高性能有源相控阵雷达,其探测距离与精度足以在远距离上发现、识别并稳定跟踪此类目标。零五四 b 护卫舰本身的舰载雷达,编队内其他舰艇的雷达和暗机超视距雷达能通过数据链实时融合信息,形成协同作战能力。 在导弹尚未进入末端机动前,其航迹可能已被完全掌握。现代体系化战争中的单向透明优势使传统的偷袭幻想化为泡影。 即使假定导弹被发射并飞向目标,它需要突破的是严密的海上防空体系。海军驱逐舰与护卫舰构成的编队已建立成熟的四层防空反导网电磁干扰区,水面舰艇与暗机雷达、无人前航器、高空无人 机、电子战机共同阻网,实施大范围电磁干扰,淹没或者欺骗导弹导引头,使其坠海或者偏离目标。远程拦截区由舰队中的零五二 d 或零五五万吨大 区担当核心,其搭载的海红旗九 b 远程舰载导弹射程超过二百公里,具备强大的抗保和攻击能力。它能在敌方导弹飞行中断, 就是尚未进入复杂机动前便进行多批次拦截,将威胁消灭在远方。中程拦截区, 这是被设为靶标的零五四 b 护卫舰的主场,他装备的垂直发射筒可填装海红旗十六中程防空导弹,该导弹反应速度快,命中精度高,抗干扰能力强,负责歼灭已突破远程防线 进入中近距离的威胁是舰艇自身的金钟罩。进城末端拦截区,这是所有漏网之鱼的鬼门关。他有两道不可逾越的防线,构成幺幺三零型进防炮,被网友誉为要你命三千, 射速高达每分钟一万二千发,配合先进火控雷达,能在来其目标的路径上形成一道密不透风的金属风暴进行硬杀伤。海红旗实进程防空导弹采用红外成像和被动雷达复合制导,擅长蛇形走位,专克低空、 超低空突防和具备末端机动能力的目标实现点穴式打击。从数百公里外到数公里内,一个亚音速目标需要连续闯过 由不同原理、不同射程、不同制导方式的武器组成的重重难关。理论上的突防概率比你追上刘亦菲的概率还要低。 现代战争是体系与体系的对抗展示的单一进攻性武器,想挑战我们海军完整的作战体系,在包含侦查、指挥、控制、通信、打击、评估、后勤保障等全要素面前,是典型的以点对面猎视明显。综上所述,通过动画模拟攻击零五 四壁,是一场在技术逻辑上漏洞百出、在战略判断上严重失误的愚蠢表演。他试图用视觉冲击来弥补技术短板, 用虚拟场景来掩盖现实失衡,用挑衅姿态来绑定国内民众。支持他以一种极其危险的方式提醒我们,军国主义企图死灰复燃的幻想从未停止。我们有必要也有足够的底气 从技术上彻底揭穿这种幻想,更要有坚定的决心彻底粉碎其军事正常化的图谋。
994军武利剑











猜你喜欢
- 1.2万吴所吊谓