pid2019更新了263怎么办

粉丝5245获赞105.6万
相关视频
 03:27查看AI文稿AI文稿
03:27查看AI文稿AI文稿played one sam for all time's sake i don't know what you mean miss elsa played sam play as time goes by why can't remember myself i'm a little rusty i'll hum it for you you say i love you all。
284may2019 04:18查看AI文稿AI文稿
04:18查看AI文稿AI文稿女孩在参观历史物品展览时,意外看到一台破旧的就是电报机,出于好奇,他随手敲了一段加密电报,没想到这段信号刚发出去,就被国家监测中心拦截到了。地电员很快把内容翻译出来,脸色一下子变得十分凝重。他立马拿着电报去找领导,我们刚刚劫获了一条幽灵信号,呼号浮萍 正在不断的呼叫磐石浮萍?怎么可能?浮萍在八十年前就已经牺牲了,那磐石是谁? 磐石是创立我们整个情报系统的。老局长失望失误,局长察觉事情不对劲,立即开车前往退休老局长的家里。他在昏迷的老局长床前播放了一段电报录音。 令人意外的是,老局长听到电报声后,手指微微动了一下,随后眼睛也慢慢睁开了。此刻刷到财神爷的朋友们,只要送上三朵玫瑰花,必定财源广进,好运连连。原来,八十年前,老局长的妻子代号扶贫, 因为叛徒告密,不幸被关进了集中营。那时他曾通过密码电报和丈夫商议救援行动,却在行动中泄露了藏身地点。 丈夫本想自己留下拖住敌人,掩护其他人撤退,但妻子见丈夫伤重,坚决不肯答应。他把刚出生的孩子塞给丈夫,要求他一定带着儿子平安撤离,自己却转身冲向追兵,拉响了身上的炸药,最终只有丈夫和孩子活了下来。然而,在爆炸的那一刻, 他的意识竟然穿越到了八十年后的今天。华夏时间二零二五年十一月三十日,天舰二十六号载人航天飞船圆满发射 成功。这时他才意识到自己来到了未来世界。还没等他回过神,原主的记忆瞬间融入脑海。原来原主从小被扔在农村,几天前才被亲生父母接到城里生活。这时,电视上的一条新闻吸引了他的注意,一位白发老人正在做慈善,他一眼就认出那是自己的儿子。接着他想起了丈夫, 心急如焚的跑出医院去找他们。刚走出医院大门,熟悉的街道唤醒了他沉睡的记忆。他慢慢走在曾经拼死保卫的土地上,看着四周完全变样的城市,心中百感交集。望着现在崭新的中国, 他不禁感慨,一切的牺牲都值得。路过一所大学校门时,一座雕像让他停下了脚步。听旁边大学生聊天,他才知道这座雕像是儿子为了纪念他而建的,这所大学也是以他的名字命名的。 强烈的好奇心推着他走进校园,在档案馆的角落里,他竟看到了自己当年用过的那台旧发报机。像被什么牵引着,他再次敲出了那封联络上级的密电。没想到这封电报一下子就被监测中心收到了。局长觉得事情奇怪,因为知道这套密码的只有两个人,一个早已牺牲,另一个就是他的老领导。 可老领导如今也病重不起,他急忙赶到老领导家中,在老人病床前播放了那段录音。让人震惊的是,原本气息奄奄的老人在熟悉的电报声中慢慢睁开了眼睛。守在床边的儿子看到这一幕,简直无法相信自己的眼睛,是昭平 还活着。而这时,女人在教室里意外发现,当年害他们的人的后代,如今竟安然在这里当学生?他顿时火冒三丈,冲上去就和对方厮打在一起。两人正在拉扯。时,局长和他儿子赶到了现场,立刻问今天上午的电报是谁发的? 旁边的女学生马上把女人指了出来。分离八十年的母子,终于重逢,血脉亲情很快化解了彼此的陌生。但儿子心里还是充满疑问,母亲明明八十年前就牺牲了,眼前这人虽然神情很像,可整件事实在太不可思议。当听到对方急着问父亲在哪里时,儿子立刻警惕起来。毕竟父亲身份特别, 过去的事知道的人寥寥无几。这时,医院打来电话,说父亲病危,儿子心急火燎的要赶过去。女人一听,也要跟着去,直接坐进了他的车里。车刚停稳,女人就推门冲进医院,连保安都没拦住。冲到病房门口时,医生连忙拦住他,说病人正在抢救,不能进去。他只能透过急救室的玻璃窗,紧紧盯着那个牵挂了一辈子的人。 此时,他已经生命垂危。八十年前的往事,像潮水一样涌上心头。在绝望和焦急中,他突然想到一个办法,用手指敲击玻璃,用他们当年约定的暗号传递消息。我说,这是我们约定好的蜜店,你答应我的,无论你在何处,只要听到就会回复我,我不能再让你胡闹下去了。 顾老。
2909星辉剧场 02:01查看AI文稿AI文稿
02:01查看AI文稿AI文稿第二个缺点是,在仅使用 p 控制的时候,如果比例系数 k p 比较大,而视觉标签在小范围内不停的抖动,云台为了跟上视觉标签,就会产生一个更大范围的抖动,甚至让机器人抖起来, 这种现象也称为震荡。出现这种问题后,我们就需要低控制。低代表微分,他的输出量是微分系数 kd 乘以当前误差减上一次误差。 它是期望值与实际值之间的变化力,去帮助解决未来可能出现的误差。 pd 控制与 pi 控制相同,它是在 p 控制给出的控制量基础上再增加一个新的控制量,这个控制量是由程序当前的误差值减 减去上一次的误差值,再乘以 k d 决定的。引入低控制后,通常可以提高控制系统的响应速度并减少震荡。同时使用 p 控制和低控制的策略也叫做 p d 控制。 现在我们大事明白了 pid 三项的作用,而对于不同系统来说,我们挑选控制策略的原则是根据控制系统选择最合适的控制策略。 pid 控制器的三项会分别对误差进行运算,产生一个控制量进行调节输出。三个控制量可以各自独立使用,也可以组合在一起使用。 当我们同时使用 p 控制, i 控制,低控制的策略也叫做 pid 控制。 pid 控制策略是现在社会正常运转的基石之一。 我们身边大到飞机、火车,小到洗衣机、空调,所有的自动化设备和智能化设备中均使用了 pid 控制器,使设备正常的运转。 接下来我们就可以使用 roomazers one 机器人和视觉标签一起编写程序,完成视觉标签跟随项目。
64泽阳 04:26查看AI文稿AI文稿
04:26查看AI文稿AI文稿然后我们接着往下看啊,我们看到动力电池这一页,然后前面三个页面端口设置 还有配置页面,三个页面都讲了,如果说大家不知道的话,可以往上翻一下我的视频了,要动力电池跟 bid 这两个页面不用新手去调试啊,他并不会影响你的飞机的飞行和操控的,所以说新手不用去调,直接跳过,那么 来到接收机这一页,那么来到接收机这一页,这里就有分支的,因为市面上的 高频头协议跟接收机种类也会非常多非常多,我是没有办法一一给大家去做演示的,那我只能演示我现在手中用的这一款黑羊高频头跟 love 接收 机的一个固件升级以及对屏方式。在飞机成功对屏的情况下,我们给飞机通电,并且给接收机也通电,连上地面站拨动遥控器的开关,这里是有反应的, 有反应的话就说明已经对屏成功了,如果说你对屏成功了对不对?遥控器这里也有满格的信号对不对?遥控器有接收机的信号, 那么指示灯也是正常的,他飞控这里也没有显示对不对?波动摇杆这里也没有显示的情况下,那么我们就 还是一样回到我们配置里,一定要检查你这里的协议跟接收机的类型对不对啊?就是这个协议这里还有你上面的端口 啊,一定要开开,对啊,你要把这个端口号一定要开启正确的端口号,那么就可以了,那么下面我们就检查这一个通道映射,我要把这个通道映射,然后我们推油门,推油门是不是响应油门的地方 要左右横滚,看到没有?左边左右的方向是不是正确?看这个飞机是不是正确的,可以看这个飞机的姿态啊,这个,这个通道映射一定要是正确的, 一定要是正确的,这个飞机的姿态。那么通道检测完之后,这些参数都不要去设置,不要去改啊。他默认是一千零五十,就是一千零五十, 中位点一一千五,这是一千五,这些都不要改,这些都不要改,我们只要确认这一步,只要确认他我们的通道运射是正确的就行了。然后我们接着讲啊, 如果说我们发现我们的油门或者方向或者抚养是错误的情况下,对不对?油门是错了,然后方向 错了,或者说横滚是错了,对不对?那那么通道是错误的情况下,那我们的飞机是没办法起飞的,明白吧?那我们就在这个通道映射这里去修改啊?通道映射这里啊, 不用选啊,不用点这个下,好像不用选,直接点一下输入啊,直接点输入就可以修改啊。就比如说,如果说我们这个油门是 t, 对不对?油门是 t, 如果说他错了,那么直接 t 跟 e 去修改一下,明白吧?把 t 这样子是可以直接输入的, 把 t 改成 e, 把它顺序改一下就行了。 看到没有?你要点一下右下角这个保存,点下右下角这个保存, 看到没有?这样子,他就反过来了,这样子,反过来。然后我们推这个油门,油门就变成抚养了,你看到没有?所以你通到错, 错误的情况下,我们就改这里就行了。直接输入啊,很简单,直接输入就行了,就这样,就这样,改修改通道映射。
95没有名字_FPV 13:33
13:33 00:19查看AI文稿AI文稿
00:19查看AI文稿AI文稿p i d 居然这么简单,几分钟搞懂 p i d 一比例控制的公式内容二用单独比例控制电机调速三比例过大会引起震荡,用电机转速看 p 效果简单又明了,看完实操一次就搞懂。
107天PLC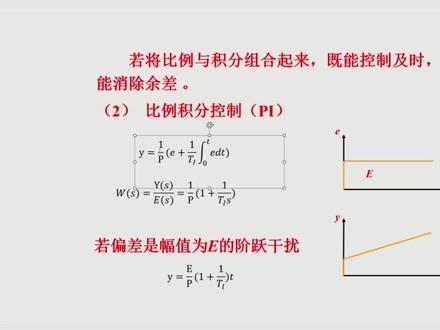 17:53查看AI文稿AI文稿
17:53查看AI文稿AI文稿把 i 作用,积分作用和 pi 控制器搞一下啊,这个找完它,因为你 pi 的 控制器,这个 i i 得上手,是吧? 首先看这个总结,先看总结,嗯,这个就是这个 pi 控制器比比例控制器呢,要稳定性要差,但是精度要好。加入积分作用后,就是原来那个比例控制器,应该把那比例系数整小点啊,然后积分作用不,不应该过大。这里头为啥不说叫积分系数或者叫积分时间? 因为如果是积分系数的话,那他就是在分子上,如果是积分时间的话,他可能就在分母上,所以说这个是是说不好,说大说小,只能说作用啊,作用应该不应该快,太大太大他就积分饱和,要么就一直这个阀门一直开着,要么一直关着啊。好了,来接下 来积分的数学作用啊,仍然是搞数学,数学就是积分,积分呢,就是对曲线下面的面积进行取和, 这两个图里头呢,能够清晰的表现出来。第一个啊,就是这个,这个,这个曲线值都正的,这是竖着是 y 吗?横着是 x 吗?横着是针对咱们这个控制里头来说,这应该是 t, 是 吧? 因为这个 t t 是 往上走,正的,正的加呗。然后当这个曲线向下边时候,向下边时候,这个就是负的啊,这就是负的,也就是这部分是负的。好了,哎,这个看看图, 哎,就是就是这么个东西啊,就是这么一个,你看这条曲线啊,这个,呃,这个首先说这,这两个图要表正的意思就是如果是误差,误差有正有负,那就可能会出现你积分的值会变大,会变小啊,会变小, 但是有一种情况是贼特殊,叫啥呢?就是这种,这种是啥意思呢?就是我这个误差一直是正的,你看我这曲线嗷嗷一直往上涨,是不是? 那你一直往上涨,然后你这个这个值是不是一直往上加呀?是不是?你比如说你这样一来,这个数,这个数就是求的那个求和啊,求和求和给他放这了, 你啪啪啪啪的就是干一万多了,是吧?干一万多你那个阀门在输出的时候肯定又是有个数了,是吧?你,那你整太多了,太大了之后不就是一直是敞开吗?是吧?就调不回来吗?啊?就这意思,这,这就表述完毕啊, 哎,保存一下,然后下面这个,哎这条的意,哎呀,我给他关了,这条的意思呢?也很明显。啥意思呢?就假设说如果你对一个周期信号进行积分的话,那恰好这个周期信号的上半段,哎,这这个两半段是在 x 轴的上下,它俩是等面积的, 那你一加,你比如说你现在我这这上面这个图加到 b 点的时候,他这个取和是二点零三,然后这个 b 点加到下一个这个零点位置的时候,他加的是应该是零,因为上面的面积是一,上面面积是正的,底下面积是负的,那你这块加之后是不是零呢?那你一零了之后,这个误差是不是很小 很小?就是我们也是一个,我们比较期望值,误差是零吗?我们是非常期望误差是负数,我们不期望误差是正数,我们也不期望,我们期望就是误差是零。但是 当如果是对积分操作进行一个周期信号积分的时候,可能会出现某些特殊点的时候,他的误差是零,但是有没有差呢?有差,但是他正负抵消了,这是我们不希望看到的啊。 哎,这,这个,然后接下来啊,详细一点的,这个,这个积分控制特点啊,就这里头只说的是积分控制特点啊, 就是必须有偏差子弹,然后呢,积分输出将随时间增长。就是你一直累积吗?相当于你一直往框里扔东西或者捡东西吗?框就是那个积分吗?扔里头那个东西就是你那个误差吗?是不是 你一直往里扔他就增大,你一直往出往出往出拿他就减小,对不对?你扔一会减一会减一会扔会,这数就不见得啊。然后当偏差消失时,输出能保证某一个值上。这个是啥意思呢?就是,哎,咱们后边一会有个仿真,仿真那就能非常说明这个问题,和咱们上面讲那个比例控器的时候,那个 y 等于 ax 加 b 那 个 b 那 个动作是一样的啊。 然后精度与稳定性两者之间折中。这个啥意思呢?就是你加入积分作用之后,会导致这个控制系统变得不稳定,那你还想让它精度高,然后你还得让它稳定,那怎么办?你就折中呗,那你就稍微变得不稳定一点,然后你精度给我提上一点,所以说这中叫折中啊。 然后积分控制就是消除余差干扰引起的持续性偏差,那就是没有余差了吗?啊,对吧?然后积分信号输着输,呃,随着时间逐渐增强,控制动作缓慢,故积分动作不单独使用。哎,好了,这条在工程上肯定不单独使用,但是在某些极特殊情况下 啊,或者是叫学院派的那些什么控制里头,可能偶尔有那么个把人把那个积分作用拿出来往上一放,说这玩意好使啊,这也有可能啊,非常可能。 然后接下来积分作用过强,产生积分饱和,这个积分饱和现象,呃,是是可以通过这个东西能够表达出来的,就是仿真取现呢。啥表达出来?但是 没有必要去研究,你就记着积分信号也得在他输出信号范围之内,如果你积分系数整,积分作用整贼强, 来一个零点二的细,来一个零点二的误差,然后你给他乘一万,然后你输出只有五百,那直接就全开了吗?对不对?所以说这时候就是说,就是就,这就叫积分饱和啊,积分饱和基本上就简单这样理解就行了,就是积分作用不要太强,容易出现积分饱和就行了啊。 然后接下来下面这个,这就是积分的一个时间曲线,这玩意大家都知道,是吧?这个是比例积分控制呗。好嘞,我们看这个图啊,这个图啊, 哎,这个公式不应该叫图公式啊,这个公式里头这个 p 分 之一实际是一个比例带啊,比例带大家可以认为是一个 k p, 然后呢?这是积分,那这个积分这个积分时间,然后放到分母上,如果是积分系数,就是把这个 t i 分 之一给他整上面去啊, 然后这个东西知道之后,那么往下走,我们就看图啊,看图说话了啊,这个是啥呢?这个是我们做的一个把那个上一个,这个这个曼特曼那个东西给他搞出来了,就是 放到里面都能拿出来了,然后这个呢,就是这个一点二,就是它里边系数,这个之后时间就是二,放到它里的系数, 然后这个积分选三分之一啊,就是积分,积分系数是三分之一,积分时间选的三,然后这个比例选的是一点二啊,然后这是这个, 然后下面这个啊,下面这个是正常的比例,呃,比例控制器啊,比例控制器加上一个 y 的 a, x 加 b, 它俩做一个比较啊,然后我们把这个图拿出来,然后再把这个曲线拿出来,然后拿曲线说图呗,是不是? 然后哎,哎,我的曲线呢?我的曲线呢?哎,这这这这这这这呢?哎,能看着吧?啊? 哎,把它往这边点整点啊。好了,现在这个东西就有了,是吧?然后我们把它这个夸一防针,然后它就出出现了,是吧?然后呢我们把这几个线呢,这几个地方都给上名了啊?给名了,这个呢就是比例,你比例,这是误差,误差成 k p 不 有比例吗?这一段就是比例,然后这段呢? 哎,就是这个积分啊,然后呢这个就是整个 pi 控制器输出,这个就是我们说的被控值啊,被控变量。然后这个啊,我们看这啊,这是一点二,是吧?比例系数,然后呢?这是零点八三四,是不是?然后这个一点二是不是?这个是二,那也就说这几个值是 固固固定好了,是吧?然后跟他比较一下,这是一点二,是吧?这也是二,也就是说现在我们的被控对象这个参数是一样的,然后前面这不一样,然后这不一样,这个就是咱们上次所说的那个 y, 就是 就是 y t 等于 k p 乘上 e, 然后再加上一个 b, 就是 纯比例控制器加了一个偏差,是吧?加了一个偏差,这个偏差说是和咱们这个积分作用最终值是一样的,对吧?我们要考虑这事啊,然后反针 啊,刷一下子就跑起来了,是吧?他跑起来之后我们就看结果呗,看结果吧,这里头是不是有值了?我们首先看这个 y 输出的值, y 输出值,然后呢再看这个 plant 一 的输出值啊,对于这俩图啊,这俩图呢,就在这个里头啊,这里上半段啊,上半段说的他, 哎,这个图有啥解释呢啊?首先我们看这个,把它弄一下啊,这个这个 plant 一 的是啥?是我们叫 y, 等于就是那个纯比例控制器加偏置之后的,那么 plant 一, 我们把它把这个给它取消它,这,这是一条很平的曲线, 什么意思?叫很平的曲线,叫很平的曲线,没有那么多的超调,因为这玩意咱们不不提那些什么叫什么,是各种是性能指标,啥玩意乱七八糟的,就要求那曲线是吧? 我们没有这个超调部分很很平缓的,上升速度很快的,刷就到一了,完之后就稳定在一了,是不是?然后我们再看这个这个歪的 y 了之后,你会发现 y 是 啥? y 是 啥? y 在 这呢,就是一个比 pi 控器, pi 控器输出的这个地方是啥?是带一个波动过来的,带一个波动过来的,也就是说如果说这我凭这俩曲线啊,我认为是啥呢?就是就是就是这好, 就是 y 等于 a, x 加 b 这种好啊,纯比例的,因为它没有超调啊,没有超调,然后我们再再研究啊,再研究 研究哪个事呢?这是不是我卖的 a 加 b 的 时候,这个偏值是不是零点八三四啊?是吧?那么你这边的时候,这边的时候输出的最终达到稳态的时候,达到稳态的时候,这个这个 p i 控器的输出值是多少?就在这 p i 控器输出值是吧?呃 哎哎哎哎啊?然后把这个输我那那个东线呢啊?把它弄到上边去,看这啊,看这看这看这看这, 零点八三,零点八三,这是啥?这是 i out, 是 吧?积分输出,是不是?这是积分输出,然后我这个 y, 这这这个纯比系数,纯比例控制器再加偏置的时候,是不是设定零点八三四,然后我这边的最终的结果是不是零点八三? 零点八三,然后咱再给他改一个直行不行,是吧?你一点二不好整吗?是不是?这个变成二可以不?哎?把它变成二, 哎,这个是二,然后把它也变成二,是不是?然后二完之后把它变成二,完之后给那个东西变成零点五就完了呗,是不是?那他就是零点五呗,零点五乘二的一嘛,对吧?哎? 五五五,零点五是吧?好了再缝针,然后我们看这个啊,看这个输出值是不是零点五?这个值也是零点五, 这个值也是零点五啊,这个值也是零点五,那就不需要再试了,是不是?那就是咱们前面搞那比例控制器带带偏差的比例控带偏差的比例控制器的时候,那个偏差就和咱们 p i 控制器里那 i 最终输出那个 积分的那个最终的结果合适啊?应该是一致的,这个一致的前提条件是你得选的那个比例控制器和那个比例系数,或者是那个,呃,比 比例控制器的比例系数和积分时间那个长数应该是比较合适的。你不能整震荡了啊。好了,这个问题解决了,然后接下来考另外一个问题啊,弄另外一个问题, 就是这个积分时间,如果是整的作积分的作用,如果整的太强了,会出现什么样的效果,是吧?我们现在这个这个它运行的这个结果啊,我们看这个 y, 这回就只看 y 了,是吧?这个震荡实际上应该是,嗯, 算可以理解吧?算,啥叫算可以理解?因为这是一点五到一点六之间,假设是一点五八,一点五八呢?我们的稳态值要求的是一,也就是零点五八对一,那是超了多少? 百分之五十八呗,对不对?实际上这个值,这对有些时候来说这个值就行,现在仿真的时候你就超两百都没问题。但是如果说你是工业现场里头,那玩意, 每一个那个参数在调整范围之内的时候,他都都是有个范围的,是吧?比如说你温度是两百度,你两百度向上百分之十,向下百分之十,两百二十度到一百八十度之间,那如果是你超百分之五十的,这玩意就不行了,是不是?那所以怎么办呢? 你看这个调节的这个方向啊,咱们在调比例控制器的时候呢,是啥呢?是从右下到左上,右下到左上是一个增长的过程,我们现在仍然是这样啊,我们现在把这个这个时间啊,把这个时间,把这个三,也就是三, 三变成啥呢?变成十啊?我们现在变,往大了变啊,往大了变就是他积分作用变小,积分作用变小,然后我们看这条曲线,你看他缓了,原来那是一点五八,咱说那一点五八,现在不是了,是吧?给他拽过来啊,这个这个,这,这一点零四,这个是不是就小了,对不对? 然后实际上这个时间呢?是十一点二,是吧?那你这个时候怎么办?我就认为可能是我这个调整时间长了啊,调整时间长了,我,我不希望这么长的调整时间,我希望他调整时间小一点,那怎么办?把这数往下降是不是?那是,那这时候咱不往上涨,咱一直往上涨啊,让他往上涨,看他长啥样啊? 哎?十十五啊,十五,这个时间十五,十五,然后反个针,然后看看看看看,这时候啊,这时候有有有点啥意思呢?就是你正常的那个,那个那个 比例系数,就那个偏控器的时候,不应该是这样一个波动吗?就是很正,你发不发现这块是啥?这个这个值应该往上这块有个偏的,是吧?往上再大点,二十啊,二十, 二十,哎,这是又往下偏,也就是说他这个头再往下低,就是整体这个位置,就是这个上来有个葫芦下来,往下一直往下降,是吧?然后再三十啊,三十,三十, 再来一下,你看他又往下降了,是吧?然后整一个大,这个胯的步子大点,五十, 五十的时候呢?刷下那东西他,他又往下,这样是吧?然后他是一直斜着走的,是吧?然后呢?如果说我们整给他整的作用小一点,咱们十的时候过来试的嘛,是吧?然后整一个,比如说七啊七, 你看这直接上去了,那一点零八啊,一点零八,然后过来现在是一点一六,这就很高了,是不?就百分之十六呗?百分之十六有点高了,是吧?然后这个来个五啊,来个五五,下一点三,然后呢? 嗯,三就越来越小,是吧? 看这啊,是不是越来越大了?好了,我们现在这个这个积分作用,是不是?我再把这个这个分母的数越往小调的时候,大家应该能看出来,是不是积分作用越来越强,积分作用越来越强, 分五那个数越来越小的时候基本作用强,因为他他这个这个这个一开始波值越大,波动值越大,是吧?你把三给他干成一,你看看能不能出啥事啊?看出啥事啊? 哎哎,你会发现这就是三了,是吧?看这,这是四,是吧?这是三四,然后呢?五八十二十,呃,这个这个就九十,哎呀, 七七十,八十,九十,九十,不往上扒拉了,为啥不往上扒拉了?因为他不知道跑哪去了。呃。如果是你一个稳太值要求是一的,然后他给你跳到三五七八,那证明这个东西就爆炸了 啊,就爆炸了啊,是不是?所以说这个数就不合适了?那,那你就说一这种情况下绝对不行了,是不是?那也就是如果说大家是真,咱咱这往上整的时候呢,时间上来就给他整一个大的数, 这个大的数千万,你要记住了,嘿嘿。整这个东西时候一定要知道这个是到底是是在分母上,分子上看他所给的那个公式到底是啥啊?然后你看这十的时候他就回来了,是不是 十的时候他就回来了,对吧?十的时候他就回来了,然后从从这里头能看到这是吧?十的时候我认为这个曲线就可以,然后,然后啊,这个里头呢,就是我觉得这个东西并不是单向的,也就说你从曲线能看出来参数的合适不合适, 这是一个方向。那我们在调这个东西的时候呢?比如说我们现在调到啊,如果说我这个东西选到二十, 或者是直接选五十,他是把什么呢?把这个头这个脑瓜子给他整到这了,哎,整到这了,这是十一点二,是吧?这脑瓜子整到这了,上来之后,这是这样的啊,就是这个这个尖峰的部分,尖峰部分往下往下低,比那个一还低, 比一还低的时候,我们就说我们这个积分的作用选弱了,一定要说积分作用,因为我现在不知道这到底是你是积分系数、积分时间,是吧?积分作用弱了,比如说我们是五十,然后放这啊啊,吓我一跳, 看看,看吧,五十就啥样了?这,这尖跑这来了, 是不是?尖跑这来了?看这啊,尖跑这来了,零点八四,然后就往回返一下,再往上升,是不是?那你尖跑这时候就不合适了,是吧?就已经非常非常之不合适了,对吧?那你再给他整,比如说我, 嗯,一百是吧?一百,嗯,这我估计得好难看这个数,看这他也是这样的,就是这个尖没了啊,然后呢,你要整这个积分作用比较合适,比如说咱们说的事实, 然后你能不能看出这个尖就到上面去了,是吧?尖就到上面去了,那也就是说如果后期去调某一个东西的时候,你会发现这个尖 啊?这个尖他没在上面,他在下边耷拉这个,这个尖,那怎么卖?这个基本作用就变小了啊?就选小了,就往往往往强的作用调一点就行了啊? ok。
42秦杰2346 03:39
03:39




![【工坊更新视频讲解】 AI配音登陆工坊!||叮咚——今日份的视频讲解已送达,请工匠蛋们查收[自拍R]~本期内容围绕工坊新增AI配音功能和物品预设支持自定义图标展开,快随本工程师一起看看吧~
快来工坊使用新功能,给蛋的地图锦上添花吧~
#蛋仔派对#蛋仔奇思妙想计划](https://p3-pc-sign.douyinpic.com/image-cut-tos-priv/f7f24f9707a598c2164402c3ab88d655~tplv-dy-resize-origshort-autoq-75:330.jpeg?lk3s=138a59ce&x-expires=2088014400&x-signature=Ks9c89Bc13yMlhViVtZKdVFsXpQ%3D&from=327834062&s=PackSourceEnum_AWEME_DETAIL&se=false&sc=cover&biz_tag=pcweb_cover&l=20260305042244C19821612D44F2AA98F4)




猜你喜欢
最新视频
- 26.6万侠客红尘