Taycan刷电机教程
在曾经程序修改领域呢,仅仅只局限于油车上,那在现如今当下这块领域,在我们的新能源电车上 也可以实现程序修改和特殊调教。那在我身后这台的话就是保时捷的 car, 那 这一台车的话,它的一个易修模块已经被完美的实现录取和写入功能,那就是在最近来自卢生宝 autotune 这一款 修读写设备呢,它的最新消息公布了保时捷 tacon 它的一个 e 修模块, a s g e 这一款型号能够通过 obd 的 方式进行读取和写入它的一个数据,那这就意味着保时捷 tacon 这款车我们可以通过读取它的 a s g e 这一个 e 修模块的数据来给它进行修改。 那修改程序的功能和作用无非就两种,那么第一种就是增加它的一个续航里程,那第二种的话就是增加它的一个马力和扭矩,那这两种都是我们常见也是非常想要的一种功能作用。 那保时捷它看的这一个 ecu 模块的一个读写的功能公布啊,那可能也意味着在后期的话,在我们 ecu 读写设备的上面会有更多的一些新关于新能源电车的一个模块, 能够更新到 e c u 设备里面,能够让我们去读写和修改,那最后关注我,让你了解更多关于 e c u 刷写知识。

粉丝6989获赞1.4万
相关视频
 03:31查看AI文稿AI文稿
03:31查看AI文稿AI文稿这是一台电车的电机,别看这么个小玩意,但它最高马力可达到上千匹。今天我们详细讲解电机的结构和工作原理,老板帮忙点个赞,这就开始往下讲。 讲解电机之前,我们要先保懂。磁就是人人都玩过的磁铁,学名叫永磁体,也就是它永远都有磁力。磁铁它跟人一样,异性相吸,同性相排,如果把两块磁铁的同极放到一起, 他们就会相互排斥。这其实就是一股小型的磁场,但这种磁场它不只是有磁铁才能产生,有电的情况下也能产生。哪怕你给一个螺丝缠绕着铁丝,给这个铁丝通电,它也会产生磁力,这就是电流磁。任何导电的物体, 只要让电流环绕式的通过,它都会产生电磁流,跟物理磁铁的磁场是一样的,而且这个螺丝只要改变它电流的方向,就能改变它磁极方向。 现在螺丝电流磁的 s 级跟磁铁的 n 级是相吸的,只要我们把电流换个方向,那么螺丝电磁流的 s 级就变成了 n 级,这时候就成了同级相排,它就会推动螺丝转动半圈。至于它为什么是顺时针转,就是因为安培定则原理。 后面我们再来讲这个,只要不断的更换电流的输入方向,就可以让中间的这个螺丝转动起来,给左边再加一块磁铁,就能形成更强的磁场,这就是最简易的电机雏形。 现在只要不断给这个简易电机升级,就能逐步完善。先把两边的磁铁更换成这种磁性更强的弧形磁铁,中间的螺丝也换成一个金属回路,只要给它通电, 它就能形成电流磁,只要切换电流的输入方向,同样也能改变这个电磁铁的磁极方向,这个金属回路就可以转动起来。现在就要解决怎么切换电流输入方向的问题, 给金属回路加上两块弧形金属片,两根线通过两个电刷与弧形金属片接触。电刷的作用就是让固定部件与转动部件在摩擦中持续不断地传递电流,也就是电刷时固定不动。 而弧形金属片旋转,他们可以在摩擦中导电。现在只要电刷一通电,每转半圈,那与电刷接触的金属片就会换一个,这个金属回路的磁极也会跟着换一次。所以只要有电,他就能一直循环的转起来,不再需要手动换电流的输出方向。但现在金属回路的磁力还比较小, 转动起来还不够快,所以还需要多增加金属回路,每增加一个金属回路,就多增加两个弧形金属片,加多了,它名字也就变了。多组金属回路的电磁铁,它叫电梳, 多个弧形金属片的这个部件,它叫幻象器,也就是改变电流方向的意思。这个电梳的回路线圈越多,那么它产生的磁场也就越强,转起来也就越快。 这是最简单的直流有刷电机,它的电压越大,磁场就越强,转速也就越快。所以控制电机转速的因素就是它输出的电压大小。 你用六十伏的电压带动一个电机,可能只有三十转每分钟,但你换上家用二百二十伏电压,那它可能就是三百转每分钟。而电书上的线圈,还有幻象器这些在里面可以转动的部分,它们合起来还有一个名字叫转子, 而外面这个固定不动的磁铁就叫砧子。这种有电刷的就叫有刷直流电机,缺点就是电刷和换向器之间是摩擦的,不仅噪音大, 还磨损比较严重,而且还容易发热。在电车上基本是被淘汰没人使用的,一般只用在风扇、排气扇、吸尘器等加电器上。下一期我们再讲无刷电机。关注我,每天分享一个汽配小知识。
17汽配小百科 02:49查看AI文稿AI文稿
02:49查看AI文稿AI文稿保时捷有一款电车,它坎其实出的还是挺久的了,但是我觉得这款车呢还不是属于最好的一个选择,但是买到的相对而言呢,也是比较多的新车,非常贵。二手车啊,真的打到骨折了, 那我给大家介绍的就是我身后的这一台二零二二年的保时捷 dak, 它是属于单电机后驱的一个版本,那这个车到底有什么好处呢?你看哈,它这里会有两个充电头, 这个呢是带 dc 的 呃,据说哈最高他是支持八百伏的一个平台,然后这边是 ac 的 一个普通的,你看在这里我在想为什么不集成灶一边,你分开干嘛呢?这设计脑回路,那前面呢跟特斯拉是一模一样的啊,可以看得到,可以放一点东西。 那这台车呢,它整个车身呢也是属于比较长的,你别看它这样子小小的,它整个车长呢也达到一百九十四,车高呢在这个五十多,整个车宽呢也达到七十七,那这个车的一个轴距呢也达到一百一十四啊,算得上是属于这种中型的这种 轿车吧,那他的一个定位呢是属于电车轿跑啊。这一款车颜色呢,我觉得还是有点粉嫩粉嫩的哈,看一下这个内饰哈,这个内饰整体呢来看一下, 先启动,启动在这边有一个一键启动挂挡就直接过是吧,那他这台车呢,续航其实我觉得不太够哈,看一下哈, 这个影像也有,该有的都有,那这一块屏幕是两块在一起的,那这一块呢,还是保留了经典的这个三个圆筒的一个设计的一个视觉,这里呢都是属于触屏的,所以内饰我感觉来讲的话呢, 算是属于很紧凑的那一种吧,虽然整车的尺寸它属于比较宽一点,但是它的内饰还是属于紧凑型的,你看我腿部的空间是吧, 那头部的呢,还是属于天窗,那这个天窗是一整块玻璃的,有点晒有点晒一点,所以我个人觉得这款车真的 你同级别,你去跟特斯拉这个 model 三去竞争的话,真的没得竞争的。而且续航呢也是有焦虑的,那充电充满的状态下,在冬天去开的话,也就在一百六七吧,我觉一百八都不到, 续航这块不行,而且充电效率呢,虽然有八百伏的,但是我感觉也不是很高,所以就是这台车呢,摆在你面前, 你会去考虑他吗?我觉得活该他二手车跌这么多。
 00:06查看AI文稿AI文稿
00:06查看AI文稿AI文稿本节内容是直流,有刷电机的驱动方法,干货满满,欢迎评论探讨哈!
 01:33查看AI文稿AI文稿
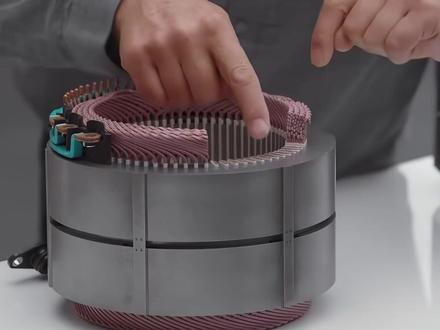
01:33查看AI文稿AI文稿才看驯服热损耗的过程,是一个现代版的矛盾的故事。要突破热损耗兼顾的防守,唯一的方式就是三电机、 电池、电控这三个核心维度上找到更加锋利的长永磁同步电机。它采用优质的永磁体作为转子, 产生旋转磁场,转子的运动与定子的磁场同步,因此而得名。根据电动式公式,导体的有效长度与感应的电动式呈正相关关系。电动机中导体极为铜线, 也就是说,如何在固定的槽内空间里塞进更多的线圈,是不改变电机体积的前提下增大功率的最佳方式。槽满率是工程商人们对线圈密度的精确表达时,与传统拉入式绕线的方法相比,发卡式线圈槽 满率可达百分之七十。同时,由于发卡是绕嘴,让线圈与峭壁的结合更加紧密,利用金属的高导热特性,让电机内部的热量可以更好的扩散。可以说,高功率调节的永磁同步电机是性能体 机发热等诸多维度权衡之后得出的最大公约数。然而,无论任何电机本身作为一个巨大的电阻元件,电流经过时所产生的大量热能才是无法持续高性能输出的罪恶之源。 在这个挑战面前,永磁电机和发卡是绕组,只是在结构上解决了机械损耗,并没有在根本上给热损耗以迎头痛击。
 37:09查看AI文稿AI文稿
37:09查看AI文稿AI文稿一小时带你学会直驱电机,搞机械的朋友别划走了,这套两百四十分钟的电机教程你一定要存下。搭载了步进电机、四伏电机、驱动电机、直驱电机耗时六个月,制作专门为零基础到机械工程师打造的系统教程, 带你学会所有电机知识,内容包含电机介绍、电机原理、电机参数、电机特性、电机选型、选型案例实操等,看完你就能学会电机选型。为了让大家学起来没有负担,配套的课程笔记和学习资料已经整理好了,暗号七七尝一尝。 大家好,欢迎来到清晨教育,我是讲师云飞,那本节课来聊一下常用的直续电机有哪些,以及什么是直续电机。 那么常用的直续电机呢,有三种,第一种就是滴滴马达,在做飞镖设计时一般是用来带动转盘旋转的,在生活中比较常见的就是滚筒洗衣机,好一点的会使用到滴滴马达,差点的就是普通电机搭配微带转动, 这是第一种滴滴马达。那第二种呢,就是直性电机,直性电机呢,在飞镖设计时一般是用来带动机构左右运动的,能够实现高的速度,能够有高的响应,高的刚性。但是也看种类,像这种平板式的啊,就是追求速度的, 像这种微型的就是追求这个稳定性的。后面啊,会细聊。好,这是第二种直性电机。那第三种就是音讯电机,种类啊,就比较多了,像这种矩形的,像这种摆动型的还有呢。呃,这种圆柱形的啊,圆柱形用的比较多啊,在做飞镖设计时,像这种 柔性制动盘用的就是圆柱形的音讯电机,好,这是常用的这个直续电机啊,三种。 那什么是直驱电机呢?来看一下直驱啊, direct drive 啊, direct drive 直接驱动的意思啊,直接驱动的意思好,那么两个单词的首字母都是 d, 对 吧?好,那 d d r, 这个 r 呢?代表的是啊, rotating, 就是, 呃,旋转的意思,也就说做旋转运动的直驱电机, 或者说直接驱动的旋转电机,也就是咱们刚刚所讲到的滴滴马达,它能够输出很大的力矩,所以说我们又叫它力矩电机 啊,又叫它力矩电机。好,那么这个 ddl 呢?就是呃,林鸟啊,呃,就是信性的意思,也就是做直性运动的直驱电机啊,通常称之为直性电机,对吧,或者你可以理解为直接驱动的这个,呃,直性电机好啊,其实呢,它这里有两种啊,第一种 就是音讯电机,像这种圆柱形音讯电机,它就是能够做呃直性运动的,对不对?还有就是 这种成本很高的直性电机了啊啊,它也是做直性运动的啊,这就是直接驱动的意思啊。啊,我们就简称为直驱电机啊,囊括的就是这三种滴滴马达直性电机,还有呢,英俊电机。 那本节课来聊一下什么是直驱,以及为什么要使用直驱,有些情况下为什么不推进直驱呢?首先什么是直驱?也就说没有传动结构,也没有变速结构电机呢?直接带动机构运动, 那像步进电机,像这个四伏电机,像普通电机,要带动机构运动都需要合适的传统结构的。 那传统的船动变速结构有哪些呢?我们先来看一下啊,船动结构分为两类,一类呢是摩擦船动,一类是逆核船动。 摩擦船动典型的就是平皮带滚筒,对吧?那优点就在于啊,来看一下,过载的时候可以通过打滑来对机构进行保护, 那缺点呢,很明显就是精度要低一些,对吧?那么逆核船动典型的就是齿轮齿轮 啊,或者是这个同步的同步轮,那么优势就在于精度还是可以的,能够得到一定程度的保证,对吧?那缺点呢,就是受到冲击的时候呢,容易出现破损。 那么典型的转动结构还有下面这几种,第一种滚珠丝杆啊,滚珠丝杆它是将电机所提供的这个旋转运动啊,通过滚珠丝杆呢变成哎这个负荷的直线运动的 啊,来看一下,这是一个很常见的四杆机构,对吧?好,那第二种就是齿轮齿条,齿轮齿条呢,要看你电机啊,怎么去使用,比如说啊,固定电机,我可以呢利用齿轮哎,让这个齿条呢直线运动, 对吧?好,或者说我固定这个齿条啊,利用电机呢,呃,带动齿轮旋转,从而带动整个机构实现直线运动,对吧?电机旋转通过齿轮齿条变成了直线运动啊,好,这是第二种,第三种呢就是同步带同步轮啊,同步带同步轮, 那来看一下啊,它也是将电机的旋转运动变成了机构的直性运动,那么它是能够达到远距离的这个输送的啊,这种同步带可以定制嘛,对吧?好,还有就是凸轮分割器,凸轮分割器呢,这里啊 是普通电机哎,搭配涡轮涡感减速器啊,通过同步带转动,带动凸轮分割器工作,从而带动转盘呢?实现间歇式运动,就是运动下停一下,运动下停一下, 对吧?好,那我们看这里啊,都是有这种传统结构的,对吧?都是有传统结构的好,那为什么有的时候要用直驱电机呢?因为传动他就会有这个损耗, 对吧?而且你的传动机构越复杂,精度反而呢不好控制,对吧?你像这个,呃,机构的间隙呀,加工误差呀,装配误差呀,都会影响着精度的。 那如果说我对于精度要求很高的话,那是不是可以选择直驱电机呢?可以的,对吧?比如说这个位置啊。呃, 我们可以直接用一个滴滴马达带动转盘旋转就足够了,没必要使用。呃,电机减速器,还有这个陀螺共振器,一个滴滴马达就足够了。像上方的同步带、 齿轮条丝杆机构都可以换成直性电机,就是成本啊,会比较高啊,成本会比较高啊。 好,那有些场合为什么不推荐之区呢?比如说我利用这个驱动电机,或者是步进电机,或者是四伏电机带动这个 直接带动结构运动啊,为什么不推荐呢?因为有下面啊,两种情况,第一种情况就是使用场合所需的转速低于电机的额定转速,四伏电机额定转速三千,而这里我不需要这么高转速,那用四伏电机浪费了, 对不对?或者说使用场合所需的利举高于电机的额定利举啊,这两种情况就不推荐哎,比如说步进电机、伺服电机驱动电机进行这个直驱了 啊,那么像直驱电机啊,同学们,直驱电机为什么适合这种场合呢?因为它就是将力矩和转速更加贴合这种低速大力矩的这种工况啊,根据这个需求从而设计的这种电机,比如说这电马达,比如说啊直性电机啊,都是这个样子的 啊,就是为了匹配这种呃低速大力矩的工况,从而设计的啊。这种电机啊,我们叫它直驱电机。好吧,那本节课来对三种直驱电机做一个详细的介绍。 第一种呢就是滴滴马达,它是能够实现大的输出力矩,低的输出转速以及呢保证高的精度的。怎么实现的?来看一下结构, 它的结构呢也很简单,上方就是输出轴啊,是旋转的部分,那下方呢就是安装底座是固定的部分, 然后呢最下方还有这个绝对是编码器,那其实从结构上来分析,它就是一台四伏电机,所以说能够保证这个高的精度,对吧? 好,那么大的力矩能有多大啊?他能够轻松做到三百牛米以上,但是呢要注意啊,如果输出扭矩是三百牛米的话,那成本会非常高,像我之前接触到的,呃,四十牛米的已经上万了,三百牛米的那起码在五六万的样子啊, 所以说要进行合理的这个匹配应用场合啊,好,那么低的转速,像这种小型号的啊,大概在两千转每分钟左右, 像这种大型号的,那么大概在七百二十转每分钟左右,它能够达到这个呃比较低的转速,同时呢保证高的精度是怎么保证的?靠的就是咱们刚刚所看到的这个编码器 啊,编码器精度高,那电机精度就高,然后呢能够有一个高的响应,就是,呃,响应时间很快,对吧?然后呢高的刚性,从结构上来看的话,刚性就很高,它本质啊,注意就是个四伏电机, 它是呢,呃,根据这个特殊的需求,比如说我需要高的钢性啊,需要低的转速啊,然后呢,定制化的特殊的四伏电机,它是四伏电机里呢钢性最好的,大家可以这么理解啊, 那么在做飞边设计时呢,一般是用来带动这种转盘旋转的,那么相比这个凸轮分割器啊,低电马达最大的缺点就是它贵啊,像我刚刚提到的四十牛米的就已经上万了,成本是非常高的, 对吧?好,那我们来看一下啊,低电马达,呃,它的一些使用场合,比如说啊,这里是一个,呃,摇量变频器, 好,我们来看一下啊,这里用的就是低电马达啊,转速可以调节啊,转速是可以调节的。好,这里是用到了两个低电马达,两个轴,对吧?好,我们再看下面这个啊,那这是低电马达任意点停止啊,这个精准定位啊,精准定位。 好,再看下一个,这里就是液压变位机了啊,要对这个零部件进行一个加工维修,对吧?好,这里用的就是滴滴马达啊,液压变位机,再看一个,这里也是的 啊,这里也是的,还有呢,在飞镖设计中常用的,带动这种大的转盘旋转,对吧?你想转盘加上制具,加上物料很重的,所以说对于钢性要求比较高,那你看这里的马达,它的高度就要高一些,对吧?好,还有像这种 啊,这里也是转盘啊,这里也是转盘啊,啊,还有这种高速的滴滴马达,看到没有?高度是很高的啊,然后呢,上方这里应该是这种吸盘或者是其他的东西啊,转速是很快的, 对吧?这里是切花环。好,那像这里也是一样的啊,像这里也是一样的啊,这种高速的滴滴马达啊,还还有这种直性电机搭配滴滴马达的啊,都是直驱电机。好,这里呢,咱们就简单了解一下啊,再往下看, 呃,第二种呢,就是直性电机,那么直性电机的话,咱们拿这个丝感模组来进行对比啊,丝感模组的极限速度大约在一点五米每秒的样子 啊,就是最快差不多就是这样了啊,在我们做设计时啊,但是直性电机它的极限速度多少呢? 呃,一般是在我们使用的时候啊,六到八米每秒钟,很快的啊,那么像这个厂家的实验室能够达到十五米每秒,但是很少以这个速度去工作。好吧,好,那么直性电机啊,我们来看像丝杆模组,它的电力精度取决于什么啊?转动机构的间隙 对吧?啊?四伏电机呢,定位精度等同于编码器的分辨率,那么直性电机它的定位精度就等同于这个光山尺,因为直电机要搭配这个直线编码器来使用啊,那就等同于光山尺或者磁山尺的分辨率了,它的精度也是很高的啊, 那么一般用来做什么呢?像做这种扫描啊,因为我对于它的这个呃有要求,就是要求绝对的这个速度,然后呢高效率生产需要这个高运行的这个速度 啊,这是我们扫描的动态要求,对吧?有这种二 d 的, 有这种三 d 的 啊,这个咱们就不多聊啊不多聊好呃,但是呢,呃像咱们刚刚呃所看到的啊,这种直性电机就是视频中所看到的啊,这种就是平板式的直性电机啊。来我们看一个图片, 就是这种啊,这是平板式的直性电机,那么它就是更加呃适合这种高的运行速度, 在下方我应该也有写到啊,我们来看一下。对啊,平板式的直吸电机,他追求的是高速性 啊,他中间呢是有这种铁芯的啊,中间是有铁芯的,所以说吸附力是非常大的。来这里我同样有写到啊, 他的优势就是速度快,他的推力很大啊,他的推力很大的啊,然后呢,因为这里都是漏出来的,所以说散热性比较好啊,刚性好,速度快,精度高, 对吧?但是缺点就是说,呃,他这里因为里面是铁芯,所以说这个吸力很大啊,吸力很大,那么会对两侧导轨的寿命有影响。然后呢,在低速运行时没有那么平稳啊。然后就是成本比较高 啊,成本比较高,他追求的是高速性,比如说像这种高速 t p n 机啊,等下咱们可以看视频啊,等下可以看视频,然后 t p n 机它的输送距离理论上是无限的啊,但是实际上呢,这个范围就局限于这个拖列啊,他现来的长度了啊。那还有一种 就是这种 u 型的啊直升电机。来我找一个图片我们来看一下啊,这种也是常用的啊,这种也是常用的。其实除了它还有一种就是这种管型直升电机,但是这种用的就比较少啊,用的比较少了啊,这种 u 型的直升电机啊,来,我们往下看,它中间没有铁芯,所以说吸力就没那么大, 对吧?他的运动会更加的平稳,所以说一般用在这种,比如说世界监测呀,啊,激光扫描啊,这个点胶啊,对吧?你看一下优势啊,平稳性更好,缺点呢就是推力没那么强,因为他中间没有铁心嘛,所以说磁力就差一些,对吧?他是追求这个平稳性的啊, 绝对平稳性的啊,就是这个 u 型直升电机啊,啊,直升电机呢,它没有这种低速爬行的这种现象,所以说我们可以用来做这种点胶啊,它不会堆胶,对吧?也可以做这种光学的这个检测。好,来,我们再往下看啊,还有一种最后一种啊,就是阴圈电机, 音圈电机的话呢,咱们简单了解就可以了啊,其实在做飞镖设计时呢,也就是柔性振动盘啊,可能会用到,对吧?好,它中间你看啊,是一圈一圈的这种铜线 啊,一圈一圈的这种铜线啊,这里也写到了,可以匹配四伏驱动系统加编码器是吧?啊,它适合做什么呢?高频的这种运动,高频的运动啊,然后呢行程是比较短的,你看这里音讯电机也就是中间这个圆柱,它可以运动啊,等下咱们一起来看视频,好吧, 好,那么它能够在呃危险的距离内进行高精度控制,比如说咱们这个手机的震动用的就是它,比如说咱们这个相机的调焦用的也是它啊,用的也是它,像镜头自动对焦用的就是它 啊,像咱们刚刚所提到的震动,对吧?这里就是可以靠音讯电机啊,或者我们叫它信信马达来进行这种高频的这种运动,从而达到一个震动的效果。好吧,来接下来啊,我们来看一下视频,来看下视频, 那像这个直性电机咱们来看几个啊,看到没有?运动速度很快的,然后呢?呃,它的这个运动距离局限于这个拖链的长度,是吧?咱们刚刚聊过啊,这种就是平板式的了啊,平板式直性电机啊,这种就是阴圈电机啊,阴圈电机 它可以实现这种高频的这种震动。行程是很短的啊,行程很短的,看一下已经在运动了啊,已经在运动了,来咱们再看一个啊,像这种高频的这种运动是吧? 这个在做设计时啊,像这种啊,小画台对吧?会用到啊,然后也就是那种柔性振动盘会用到。那像这种也是音频机 啊,像这种直升电机啊控也也相当于说就是一个四伏电机,只不过把它结构上给平铺了 啊,结构上平铺开了,所以说你看它的控制是非常的这个方便的啊,这种就是咱们刚刚所提到的用的比较少的那种管型的啊,管型直升电机了啊,看起来像一个五管气缸,这个大家分析结构时要注意啊,有的时候用的是管型直升电机,有的时候用的是五管气缸,对吧? 好,来我们看啊,这里形成很长的这个针眼肌下方都是这个钉子,对吧?动子在这个位置啊,动子是运动的啊。 啊,像这种点胶机,因为它没有什么,没有低速爬行现象,所以说适合做这种点胶啊,要求比较高的这种点胶就可以用它来做是吧?啊,我看看啊,这个就没什么可讲的 啊,像这种直升机啊,做这种,呃,贴标对吧?它的速度很快啊,速度很快 啊,这种直升机搭配滴滴马达的对吧?来,我们再看一个啊,这种就是,呃,它情况就有点不一样啊。情况有点不一样, 他这里就是做飞镖设计,基本上不会用到啊,一些特殊的这种场合会用到啊,像这种 运行的距离是很长的好吧。好,那三种直驱电机我们就了解这么多,那本节课来聊一下直驱电机的选型。 那么直驱电机的选型呢?跟不进电机、射伏电机选型就不一样了,像不进射伏我们一般怎么选择的?首先就是要计算出带动机构运动所需要电机输出的最大的扭矩,或者我们叫它工况需要的最大输出。 然后呢再给电机一定的安全系数,比如说四伏电机,我们一般是给两倍安全系数的,因为四伏电机呢,它具备固载能力,它的最大扭矩是额定扭矩的三倍,所以说安全系数给两倍就够了。 那么不仅电机呢,要看转速,要看负荷,像这个转速较低啊,负荷较轻,安全系数一点五到两倍, 如果说转速较高,负荷较重呢?安全系数两到三倍,对吧?这就是步进四伏,我们怎么选择的?但是直驱电机啊,选型就不一样了,我们要按照这个公式来计算出什么呢?有效的这个推力 啊,呃,来看一下啊,这个 f a 就是 加速推力 f b 呢?匀速推力 f c, 减速推力 f w, 静止推力后方 t a t b t c t w 就是 对应的这个时间, 那么通过上方的公式,我们能够算出有效推力,再根据这个有效推力呢?对直驱电机兼选型 啊,为什么不直接给安全系数呢?因为直驱电机成本是很高的,如果说直接给安全系数,那就成本太高了,太浪费了,对不对?所以说要满足下方的两种条件,我们来看一下啊, 那么直驱电机在选型的时候要计算有效推力,对吧?那么,呃,工矿需要的最大输出,也就是我带动机构运动所需要的这个最大的力啊,要小于什么呢?电机的峰值输出,这是电机样册里面所提供的数值, 同时啊,这个工矿的有效输出就是我们刚刚所算出的这个有效推力要乘以这个一点三倍的安全系数,然后呢,小于样册里面所提供的电机的有效输出数值, 满足这两种情况,才能够保证成本不会太高,同时呢,又能够满足我们的使用需求啊,这就是直驱电机选型啊,它的依据。好,那么下方呢,就是两种运动类型,这里我们先来分析一下, 第一种运动类型就是梯形的轨迹,第二种呢,就是三角形的轨迹,像这个直性定机一般是梯形轨迹,因为直性定机它呃行程比较长,会有这个匀速的过程,我们来看啊, 呃,一开始是静止,对吧?然后呢,先加速,加速到一定速度,保持这个速度一定的时间,也就是匀速运动,然后呢,再减速,直到静止,然后呢,保持静止一段的时间, 那么其中啊,为一辆就是梯形的内面积,注意啊,为一辆就是梯形的内面积,横轴是时间,竖轴是速度啊,好,这是这个梯形的轨迹, 那看一下,有匀速运行的这个要求,形成比较长的这种场合啊,比如说指向电机,对吧?那么滴滴马达呢?一般是三角形的轨迹,因为滴滴马达一般带动转盘旋转, 运动下停一下,运动下停一下,运动的时间是很短的,对不对?所以说他就没有这个匀速的过程,他只有加速和减速的过程, 你看啊,一开始静止,先加速,加速到一定速度立马减速,然后呢,保持静止一段的时间,那注意啊,位一量就是三角形的内面积了啊。啊,这个横轴竖轴都是一样的时间速度。好,那这种情况下就是点对点形成短时间短的这种场合 啊。那先了解一下两种运动类型,那本节课来聊一下直线电机的选型,上节课有说过,选择直驱电机时呢,要去计算有效的推力, 而且要满足下面两个要求。第一个要求,工况需要的最大输出,也就是带动机构运动所需要的最大的力要小于等于电机的风值输出呢,是样册里面提供的,不需要我们来算啊。 好,第二个要求就是工矿的有效输出,也就是咱们刚刚所提到的有效推力乘以一点三倍安全系数,要小于等于电机的有效输出。同样的这个量啊,是样册里面所提供的数值啊。 好,那下面呢,就拿直线电机为例来讲讲这个选型,像本台设备中就用到很多的直线的啊, u 型的。好,那已知条件啊,有哪些?来看一下。 第一就是负荷的质量啊,带动的负荷都重二十五千克。第二呢,运行速度,注意啊,这个零点二米每秒,他指的是匀速的速度啊,零点二米每秒, 好,那么加速时间呢?零点一秒,像这种直线电机,我们可以把它理解为一个平铺的四伏电机,所以说加速时间同样是很快的啊,给零点一秒啊,好,那么减速时间一样的零点一秒,那么匀速时间呢?给了一个一点九秒, 静止的时间呢,给的是一秒钟啊,那么摩擦系数这里用的是什么?导轨滑块,所以说给了一个零点零五, 因为这台设备是一个检测扫描设备,所以说有匀速运动的要求,那么运动轨迹就是梯形轨迹了,上节课啊,同样的,有说过的, 梯形轨迹的话呢,是一开始静止,然后呢加速,加速到一定速度啊,然后呢保持这个速度,一定时间就是匀速运动,接下来再进行减速啊,然后呢,再保持一段时间的这个静止 啊,那么其中梯形的那面积就是为一量了啊,这个竖轴是速度,横轴是时间啊,好,注意,这是梯形的这个运动轨迹,那接下来我们要算的就是这个加速度了, 加速度就是匀速的速度,除以加速时间嘛,匀速速度,知道啊,零点二米每秒,那么加速时间又是零点一秒,对不对?所以说这个,呃,加速度我们能算出来是两米每秒方,注意啊,两米每秒方, 那么接下来呢,来去计算这个有效的推力来去计算啊,有效的推力。好来看啊, 那我们要利用到这个公式,我摆在旁边啊,其中 fa 是 加速推力 f b 呢?匀速推力 fc 减速推力 f w 禁止推力,后面 t a t b t c t w 就是 对应的这个时间,这个时间我们是知道的, 对吧?像这个加速时间零点一,减速时间零点一,匀速时间一点九,静止时间一秒钟,这几个量我们都知道,就是这个力,还不清楚,对吧?好,那么加速阶段的这个推力啊, f 就是 呃,这个加速力加上这个摩擦力 m a 加 m g, 其中 m 注意啊,二十五千克 a 呢,两米每秒方, mu 的 话,我们取的是零点零五,对吧?小 g 的 话呢,重力加速度取十,方便计算。所以说这里我们能够算来,先数值六十二点五牛,这是加速推力啊,六十二点五牛,那么匀速阶段的推力呢,就是 mumg 嘛,也就是多少了?我们来看一下啊,十二点五, 对吧?好,那么减速阶段的呢啊,就是 m a 减 mumg, 也就是呃,五十减,十二点五,就是三十七点五牛, 好,那么静止阶段呢?静止阶段是没有力的,对不对?所以说啊,通过这个计算,我们能够得出有效推力或者说持续推力的这个数值是多少啊?你要去计算一下,然后呢,开个方啊,就得出来了,呃,得出的这个结果看一下啊, 得出的这个结果是十六点三,十六点三牛啊,然后不要忘记了,不要忘记了啊,要给他一点三倍的安全系数的啊, 我们算出的是有效推力吗?要乘以一点三倍安全系数,得出的结果是多少呢?得出的这个结果来我们看啊, 是二十一点二牛,好,那,呃,刚刚咱们所提到的第一个条件是工矿需要的最大输出,那么在本道例题中,他指的就是谁啊?加速推力 多少呢?六十二点五牛,对吧?最大瞬时推力六十二点五牛,就是加速阶段的推力,他是最大的。好,那这个时候根据这两个量,我们就去找对应的这个直性电机就行了啊,这里呢,我拿这个湖南天友的这个直性电机 样测为例啊,这是 u 型的执行电机啊,注意一下 u 型执行电机。好,那我们往下看啊,往下看, 它这里呢,连续推力不同型号的提供的数值不一样,十八的,二十七的,三十七,四十六的,对吧?来往下看啊,还有一个峰值推力九十二,一百三十七,一百八十三,二百二十九,那么要同时能够满足要求, 对吧?那我们要选哪个型号的?你看啊,这里有效推力是十六点三,乘以一点三,就是二十二一点二,那要找比二十一点二大的,这个 t d x 二零 b c 三就可以,因为它这个连续推力是二十七,大于二十一点二, 那么我们再来看啊,它的峰值推力多少呢?一百三十七,而我要求的是六十二点五,可不可以?可以的,没问题,但是啊,如果说你小一个型号,这个连续推力就不够了, 对吧?没有比二十一点二大啊,十八比二十一点二小的,虽然说他的峰值推力满足要求,但是持续推力不行,所以说我们最终选择的是这个 c 三的啊,选择的是这个 c 三的啊,好,这就是关于呢直线定级的这个选型啊,直线定级选型, 那如果说此时我选择的是四伏电机,同学们要利用这个最大的瞬时推力,就是我们要去根据带动机构运动所需要的最大的力或者是扭矩啊,乘以两倍安全系数啊,得出的结果是一百二十五牛,利用它再去选电机, 对吧?那这样选的话成本就太高了是不是?这是四伏电机选型的方式啊,乘以两百零系数,用最大数值,那如果说直驱电机这么选的话,那成本就太高了啊,所以说不推荐啊。好,咱们还是按照这个 呃有效推力来选,要更合适一些。好吧,那本节课来聊一下滴滴马达的选型。首先来看本台设备, 在设备中呢,有一个转盘,转盘下方所使用的就是滴滴马达,那么转盘上方呢,还有很多的制具,制具上摆放着物料,那我们来看已知条件啊, 首先就是这里转盘的这个直径啊,给的是零点五米啊,零点五米, 那么转盘的厚度给的是十五毫米,那统一下单位就是零点零一五米啊。好,那么转盘的材质呢?是六零六幺的铝合金,这三个已知条件有什么用呢?用来计算转盘的质量对吧?好,那么制具的数量啊,注意是八个 八公位,也就说每一次旋转旋转多少度啊,三百六除以八就是四十五度,对吧?好,那么制具的质量啊, 一个就给一千克了啊,包含物料,一个我就给一千克了,包含物料,因为这里物料是很轻的啊。 好,那么这具重心距离旋转中心的长度啊,我就给了一个零点一五米,你看啊,转盘的直径是零点五米,半径就是零点二五, 对不对?好,那么这具重心距离旋转中心给一个零点一五是挺合理的对吧?一百五十毫米啊,好,那么转动的时间注意啊, 每一次转动的时间是零点三秒钟,也就说加速和减速分别是零点一五秒, 对吧,因为滴滴马达它一般是那种三角形的运动轨迹,没有这个语音速度过程的啊,来,我们来看一下啊,运动类型,呃,应该是上上节课讲过的啊,这种点对点形成短时间短场合,一般是三角形的运动轨迹 啊,先加速,加速到最大速度就减速,然后呢,保持静止一段时间。好,那么这里保持静止的时间是多少呢?要看节拍,这里节拍是一点三秒,也就说保持静止的时间是一秒钟,对吧?好,这是一日条件啊,那么接下来我们要算了,那这个有点复杂,先算什么呢?转盘的惯量 就是这个转盘旋转所产生的惯量,公式很简单,二分之一 r 码方, m 是 谁呢? m 就是 转盘的质量要根据这个六零零幺铝合金的密度啊,根据这个转盘的体积来算。这里我就不讲过程了啊,反正最后十二节课左右 啊,那么半径呢?呃,零点二五米对吧,直径是零点五米吗?那半径是零点二五米,计算一下得出结果,零点三七五啊,千克平方米的样子啊,好,这是转盘的惯量啊,那么制具的惯量呢啊,公式就不一样了啊,不是二分之 m, r 方是 m, r 方, m 是 制具的质量,一千克 啊, r 呢,就是这个。呃,质距中心距离测量中心的长度零点一五米啊,因为有八个要乘以八,然后呢,质量是一千克吗?这里就略掉了啊,当然呢,你加一个乘一也行啊,乘以一也可以啊 啊,再乘这个后面这个半径的平方也行。好,得出结果是零点一八千克平方米。那你看啊,总的关联是多少呢?两者相加零点五五五啊,零点五五五。好,那么接下来要算的是什么呢?要算的是角加速度 啊,要算的是角加速度。好,这里啊,我来画一个图像或者咱们用啊,不行还是画一个啊,还是画一个 好。横轴啊,注意是时间,竖轴呢就是角速度了。来,我写一下啊,竖轴是角速度,横轴是时间啊,刚刚说过了,它是一个,呃加速的过程,对吧?它是一个加速的过程。 好,然后呢再减速,对吧?其实这个三角形的面积该怎么算呢?同学们,就是角速度乘以时间, 对吧,再除以二就是这个三角形面积,而三角形的面积,注意啊,因为这里竖轴是这个角速度,所以说这里应该是弧度, 对吧?所以说你看啊,咱们先算的是路程的弧度是多少啊?路程弧度多少?呃,一百八是 pi, 那 四十五度呢,同学们就能够得出对应的这个弧度是多少了, 是不是?好,那你看啊。呃,假如说咱们用这个来代表弧度啊,来代表弧度,那么角速度不就是二倍的弧度再除以旋转所用的时间吗? 对吧?这个 t 啊,旋转所用的时间 t, 然后呢,这个角加速度它等于角速度再除以加速时间也就是它的一半啊,零点一五, 懂吧,这个过程大家应该能理解啊。好,那我们来看一下啊。呃,路程的弧度就是四十五乘以 pi 再除以一百八啊,零点七八五 r d 啊,就是弧度的意思啊,零点七八五的样子 啊。呃,一百八十度对应的是 pi, 那 四十五度就是四十五乘以 pi 除以一百八吗? 对吧?好,那我们看啊,角速度,它等于二倍的弧度再除以这个时间,这个时间是转动的时间多少呢?是零点三秒钟啊,转动时间零点三秒。好,得出的结果是五点二三, 大家可以自己算一下啊,可以自己算一下五点二三。好,然后呢,角加速度度等于角速度除以加速时间。注意啊,这个题是加速时间多少啊?零点一五, 得出结果是三十四点八八,弧度每秒方啊,这是脚加速度的计算过程啊,脚加速度的计算过程。然后呢?呃,要去计算这个加速的力矩, 也就是惯量再乘以脚加速度,惯量乘以脚加速度啊,就是加速力矩是十九点三六牛米啊,十九点三六牛米, 然后呢,匀速力矩这里我就随便给了一个数值。啊,为什么啊?大家想一下,这里匀速力矩其实就是 d d 马达中间不是有轴承吗?对吧?好,轴承的半径再乘以这个摩擦力 啊,轴承的半径再乘以摩擦力,这个摩擦力是很小的,因为摩擦系数很小,零点零几的样子,所以说这里我就随便给了一个数值,给了一个两油米啊,可能还没有这么大啊,可能还没有这么大。好,那我们看啊,加速力矩,匀速力矩都知道了,那峰值力矩呢?就是两者相加 二十一点三六,对吧?那接下来我们还是要去计算什么呢?有效的力矩二十一点三六,对吧?那接下来我们还是要用到之前我们所提到的这个公式啊, 只不过这里没有匀速过程,就是 f b, 这个咱们就可以忽略了啊。哎,这个后面这个咱们也可以忽略 啊,但是要把这个时间给算好啊,时间多少啊?咱们刚说了,节拍是一点三秒,所以说这个时间就是一点三秒啊,这个时间就是一点三。好,那上方的话,你看啊,加速是二十一点三六 啊,乘以这个 t a, t a 是 加速时间是吧?零点一五,那减速呢?就是十九点三六减二。刚刚不是十九点三六加二吗?这里就减二,那就是十七的样子,十七再乘以这个减速时间零点一五啊,这是对应得出的结果,那么两者相加一百零九点五,再除以这个总的时间 是八十四点二三,开个方决定一期。那注意啊,还要再给他乘以一点三倍安吉系数的,就是十二牛米。好,这两个量就很重要了,一个是有效推有效力矩十二牛米,一个是峰值力矩二十一点三六 啊,一个是分值率二十一点三六,这两个量就很重要了。来,我们看样测啊,看样测,这是上银的滴滴马达的样测啊,因为这里算出的数字比较小,所以说我们就看这个最小行就可以了啊。像 t m s 幺二 g 的、 幺四 g 的、 幺六 g 的、 幺八 g 的, 哪个能满足要求呢?我们看连续转举 五十、十五、二十,我这里所需要的这个连续转举或者说有效转举多少呢?十二,那只有这个十五的可以, 对吧?二十又太大了,五十的话呢,又太小了,对不对?那么我需要的分值率是二十一点三六,他的分值率呢?也就是下面会有提供的啊,顺式转举 给的是四十五,够不够用?够用,对吧?这个数值啊,绝对是够用的。然后我们再往下看,他的转子惯性举是零点零零七, 对吧?那我们算出的这个总惯量是零点五五五,我记得啊,零点五五五,对吧?好,那你再处一下,得出结果是七十九,那么小于一百就可以, 因为低电马达它本身的刚性很大的,像四伏电机可能就是小于三十,低电马达小一百都没问题。好吧,七十九小一百,所以说绝对是能用啊,所以说我们最终确定的型号是谁呢? 呃, t m s 幺六 g 啊,这个型号的滴滴马达就可以。好吧,那今天啊,关于滴滴马达选型,咱们应该说讲得非常详细的。
202小夏说机械






![保时捷taycan变速箱故障维修
惠州保时捷专业维修
taycan专修
taycan电池维修
专业精修:保时捷二代、三代混合动力及Taycan高压电气系统,大量配件现货。
来了就可以搞定,专业靠谱、全国接单[抱拳][抱拳]。#taycan变速箱 #taycan专修 #taycan电池维修 #taycan专业维修 #taycan电气系统故障](https://p3-pc-sign.douyinpic.com/image-cut-tos-priv/92dfd66febe0dfc1f464c8c7a6d2f811~tplv-dy-resize-origshort-autoq-75:330.jpeg?lk3s=138a59ce&x-expires=2087863200&x-signature=HLsIB1Ix0NSjYSVhFHypnKpAlYc%3D&from=327834062&s=PackSourceEnum_AWEME_DETAIL&se=false&sc=cover&biz_tag=pcweb_cover&l=2026030310544614DDAC4B7698C8781D2E)






