w11打不开亚德客选型插件

粉丝3527获赞1.3万
相关视频
 00:47查看AI文稿AI文稿
00:47查看AI文稿AI文稿关于亚德克三 d 选型软件打不开他问题解决方案,一、进入亚德克官网二、打开产品中心三、点击软件与下载 四、点击亚德克产品行路二零二三三 d 五、解压下载文件至当前文件夹六、打开解压后的文件夹七、在搜索框输入 d 八、打开绿色运行程序,有两个文件,其中一个六十四位打不开,把三十二位可以打开的文件单击右键发送到桌面。快捷方式 八,更改快捷方式名称为亚德克选型路二零二三年三月内至此,软件打破问题已经解决。
330HeYon 01:19查看AI文稿AI文稿
01:19查看AI文稿AI文稿一分钟教你正确的打开亚德克气缸插件。哈喽,我叫小林,今天有粉丝来问我们,就是下载好了我们的亚德克气缸插件之后, 双击这个快捷键的话,他是不显示不打开的一个状况可以卡住,今天就教大家如何正确的打开。先点击我们快捷键, 点击右击这里就会有显示有一个打开文件所在位置,他这里就其实就会出现两个,他一个是我们的一个六十四位,一个是三十二位置,这是我们电脑的属性。或者还有一个方法就是什么,就是 就是复制我们前面的这个 pd 的这个英文的一个名称,复制他到我们的一个电脑电脑这里去搜索也是可以的,点击查找出来会有两个,点击右击这里也会显示一个打开文件所在位 字,点击他这里他就会有一个六十四位置,如果说你是六十四位置,你就可以说右击这里会有一个以管理身,以管理员身份运行,或者就是到我们这个三十二位置找到我们这一个文件,都可以试一下, 因为他有的电脑是六十四位置,有的电脑是三十二位置,如果说你打开哪一个可以的话,你就点击右击,点击发送到桌面快捷键就可以了。
 02:16查看AI文稿AI文稿
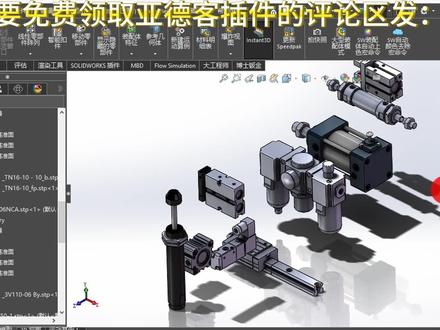
02:16查看AI文稿AI文稿hello, 大家好,今天给大家分享一下 solo box 中气缸如何用插件自动生成, 例如我们的一个滑轨跟滑台跟推力气缸,电磁阀及三元件及气缸,还有就是一个伸缩气缸,还有一个 手指气缸,还有我们的一个缓冲器,我们利用的是一个我们台湾的一个雅德克插件,里面包含的两大类,一个是电线滑轨,还有一个气气动元件, 气动元件里面就有一个二元件的一个种类,还有个电子阀,还有气缸,还有辅助元件,还有一个美国的一个美规的一个标准, 里面就包含了有很多的一个种类及类型。这里直接输入成一个 stp 通用格式,因为他在,因为他在输入版本中最高的一个版本就是二零幺八版本, 这里一个线性花柜,里面包含的个 hsa, lsh 系列,这四个系列 选择我们要的一个划开的一个数量,而我们的一个精度点击直接生成 stp 格式,他这里就会有一个为你保存的一个路径。我选择的是桌面,我选择的 是桌面,点击确定保存,点击确定他就保存到我们的一个桌面,打开我们 solo 是软件, 就会自动生成我们的一个花龟。 想要这个插件的一个安装包,评论区评论学习免费发放给你,有什么安装问题不懂的也可以发私信给我。
 00:24查看AI文稿AI文稿
00:24查看AI文稿AI文稿输入 works 的 快捷键失效,你是不是经常遇到?尤其是像我们第三方插件?不要慌,只要你打开我们自己的快捷键设置,比如要设置选行计算的快捷键,我们双击一下快捷键这个格,然后在键盘输入 x x 保存,回到输入 works 界面,只要你点击两次 x x 机械设计选行计算页面就弹出来了。你还可以导出和导入快捷键配置,你的任何电脑都可以使用相同的配置。
66开拔网工具箱 00:25查看AI文稿AI文稿
00:25查看AI文稿AI文稿国家送的 solo 最强外挂插件,百分之九十九的机械人都不知道!就是这个整合版插件,无需安装,打开即用,只要有了它,就等于有了怡和达、亚德克、凯源木风工具箱、上瘾、朗乐、米斯米、 东方马达等二十一种不同插件,它整合了这些插件的所有功能,内置标准件模型高达几万种,从气动原件、紧固件选型到各类设计辅助工具调用,全程一站式搞定,做设计时再也不用来回切换,还支持离线使用,用了就会上瘾!安装包我都整理好了,看到七七我直接砸过来!
971橘子(籽料群置顶自取) 01:28查看AI文稿AI文稿
01:28查看AI文稿AI文稿这个是亚德克的调压过滤器,即使是新的,他有时候也会出现一种问题,就是说我们主气管从这里进气,压力表上已经显示有压力,代表里面已经有气体了,但是出气口不出气啊,往往会出现这样一个问题, 这个问题怎么去解决呢?其实很简单啊,就是因为它里面这个里面有一个过滤阀芯啊,这个过滤阀芯他拧的太紧了,上面的气下不来啊,里面有一个弹簧下不来,弹簧被压死了,被被上面有一个活塞给压死了,我们可以拆开看一下啊,打开看一下这个结构啊, 就是这个阀芯啊,这个阀芯是可以拆下来的, 看到了吗?这里有一根弹簧,上面是一个活塞, 就是这个活塞被压的太紧了,气下不来,我们只需要把这个拆下来之后 重新装一下,然后主要是这个东西啊,主要是这个滤芯,这个滤芯你不能拧的太紧,拧的太紧的话这个弹簧就压死了,所以说这个气下不来, 我们把这个阀芯装回去之后啊,你这次就不要拧的太紧了,你稍微松点啊,拧到三分之二这样就可以了,然后再把这个给它装回去,这样的话这个气就可以下来了,这问题也就解决了。
53电体双修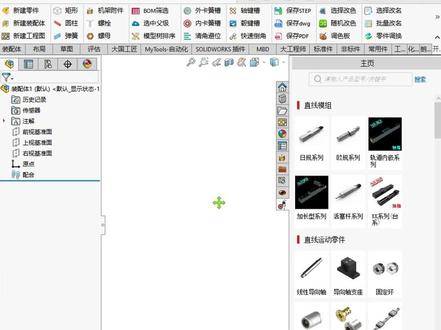 00:33查看AI文稿AI文稿
00:33查看AI文稿AI文稿今天的话来给大家分享一个我自己一直在用的很好用的 sw 选型插件,就是这个蚂蚁工厂选型插件,它这里面功能很齐全,从直线模组到直线运运动零部件一直到下面等等等等,很多很多。比如说 现在我要调取一个连轴器,我点击这个连轴器,然后再选好它的一些类型,然后再来选一些参数, ok, 那 么选好之后点击 s w 插入 ok, 它就会自动的把这个连轴器,把它给插入到这个装配体里面来,操作非常的简单。
 00:27查看AI文稿AI文稿
00:27查看AI文稿AI文稿solo x 超级恶心的两款插件,用完直接遥遥领先!第一款蚂蚁工厂插件,完全免费的选型工具,含盖直线模组直线运动零部件连轴器等多种零件, 操作简单,输入对应参数,一键插入就能自动添加到装配体中。第二款整合版插件,由二十一个实用工具组合而成,平时常用的各类标准件库选型工具全都包含在内,感兴趣的朋友二十二拿去尝一尝,不用再为功能不全而频繁更换插件了。
 55:39查看AI文稿AI文稿
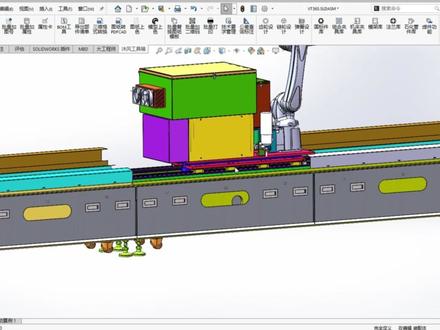
55:39查看AI文稿AI文稿吊打付费目前最完整的机械设计传感器系统教程,包含了所有干货内容,这还没人看,我不更了,本视频耗时半年,制作长达一百九十八分钟的系统课程, 别划走了,这个你真能学会,零基础进阶高功掌心必备内容包含慢反射型、全反射型、对射型、光电传感器、光纤传感器、圆柱形接近传感器、方形接近传感器、磁扇齿、光扇齿、旋转编码器、 形成开关等等相关知识,逼自己全部看完,你的机械水平就牛了!为了让零基础的小伙伴学习起来没有负担, 相关的学习资料我都已经整理准备好了,机械设计手册、选型样册,上百台的机械设备量产图纸,以及一些高效的计算软件插件,从零到一的教学视频等等,我都打包整理好了,需要的同学留个七七七,我挨个给。 关于传感器啊,首先第一个问题,他在非标准化领域,他的一个作用是什么呢?对吧?那么在这里的话,老师可以给你们打个比喻,对吧?呃,就相当于我们人啊,我们人在干活的时候,我们的眼睛啊,可以看到我们这个活到底有没有干完,有没有干好,对吧? 然后,呃,我们再将我们人眼睛所获取的信息传给我们的大脑,然后由大脑来评判 这个结果对不对。那么感应器啊,它在非标准化领域,其实它就相当于是我们人的眼睛啊,那么感应器它可以感应到你这个动作,它到底有没有完成,是不是?它也可以感应到你这个物料啊,到底有没有搬运过来, 是不是啊?那么它的作用就相当于是人的一个眼睛的作用啊,然后再把这个结果把它反馈给 prc 啊,如果说做到位了, ok, 进行下一步动作,如果说没做到位啊,报警停机是吧? 好啊,那么感应器啊,它的感应原理是什么呢?其实,呃,从笼统的来讲的话,感应器它这个感应原理其实无非就是将各种物理信号转换为电信号啊,传给 prc, 然后再由 prc 根据这些信号的一些结果啊,来指挥设备进行下一步动作, 对不对?那么就比如说光电传感器对不对?它是将光信号转换为电信号,那么接近开关的话,它也是将电信号转换为电信号,对吧? 呃,这就是感应器啊,它的一个广义上的一个感应原理,对吧?那么感应器它在我们飞镖自动化里面啊,所用到的一个一些主要场合有哪些呢啊?首先第一点是模组的原点及限位啊,这是我们感应器它所运用的 最多的一个场合,对不对?因为我们模组里面啊,他有,一般来说他会有三个地方需要有感应器,对不对?第一个的话是中控线位啊,第二个再是一个圆点,对不对?那么其实如果说你的这个四伏电机啊,它是一个绝对值编码器的,其实它就不需要圆点感应器了,因为它编码器它是自带感应原点的 啊,这是我们这个自动化里面啊,用到第一多的啊,第一多的,那么第二多的场合,那么就是感应有物料的,那么同学们可以看到这里来啊。 呃,这里的话是一个气缸机械手啊,首先,呃,水平的话,它是一个无感气缸啊,来做个搬运,然后数值的话,它是用的一个滑的气缸来作为一个升降,对不对?那么这个气手的话,会把这个黄色的玻璃啊,从这个转台上面啊,把它搬运到这个定位平台上面来, 对不对?那么我们怎么来评判啊?怎么来感知啊?这个接手他真的把这一个玻璃啊放到这一个定位平台上面来呢,是不是?那么这这个时候的话,就需要在我们这个定位单元下面加一个感应器, 对不对?在这里应该要加个感应器,那么这个感应器应该加什么类型呢?啊?这个后续我们再来讲,好吧,那么这里的话只是告诉你们啊,在这种时候啊,我们就需要加感应器来感应这个物料啊,他的一个位置,是不是? 那么从原则上来讲的话,在我们飞哥自动化里面,我们的物料他每走一个位置啊,是都需要感应器来感应到他的位置的啊, 就是我们感应器啊,它每被搬于一个位置,那么它下面相应的地方啊,都需要加感应器来感应它的位置啊,来感应这个动作有没有完成啊?这是第一点,那么第二点的话就说,呃,在我们,在我们飞标自动化里面啊,我们每一个动作啊,也都需要感应器, 是不是?那么就比如说我们这个气缸动作对不对?那么它也需要磁开来感应它的一个动作,是吧? 那么我们这里的一个转台的旋转是不是他是由电机带动的,是吧?那么电机的话他也是有编码器来感应他的动作 的,是吧?啊,那么这就是啊,感应器在我们飞镖自动化里面他一个作用啊,好吧,那么如果说同学们还想知道更多关于飞镖自动化方面的知识啊,可以关注我,好吧,那么我是清晨卓老师,同学们,再见! 大家好,我是清晨教育周华老师。本节课我们来讲一下这个光电传感器里面的那个慢反射型光电传感器啊。嗯,那么在讲解这一个感应器之前啊,其实同学们需要先了解一下什么是慢反射啊,什么是慢反射。好,那么我们来看下这个图片, 嗯,慢反射的话啊,嗯,它是反射的一种方式啊,还有镜面反射啊,那么在我们现实的物体当中啊,从微观上来看的话,它绝对不是这种 光滑的一个平面,对不对?那么它任何物质表面,它肯定是粗糙不平的,对吧?那么就像现在我们有一个物料啊,有一个制具啥的,对不对?那么它的表面啊,肯定也像这一样的啊,粗糙不平。那么当我们这个光电传感器啊,在它的表面发射啊,一束光线过来之后啊,那么它肯,那么这些光光线肯定会被反射回去,对不对? 因为它的表面是粗糙不平的,所以说它会往各个方向去反射啊,那么我们再来看一下这个光电感应器,它的一个结构啊, 那么这就是光电杆器,它的一个结构啊,它里面是有一个光线发射器啊,和一个光线接收器的啊,那么这个光线发射器的话,它就会发生一束光线啊,照到雾水表面,对不对?然后再经过雾水表面发生慢反射啊,再由这个光线接收器啊,来接收慢反射回来的一个光线, 对吧?那么这就他的一个原理啊,一个原理,那么因为慢反射啊,他的那一个反射角度啊,是随机的,对不对?所以说啊,呃,他这里如果说他发生了百分之百的光线啊,那么他这里所接受的光线可能只有百分之六十或者百分之五十,对不对?那么因此啊,就注定这种 慢反射型的光电传感器啊,他的感应精度是不高的,同学们,他的感应精度是不高的,那么一般而言的话,他仅仅只能作为感应有无物料啊来使用啊,同学们, 那么而且啊,因为他这种方式的话,他还有一个弊端,那么什么弊端呢?就是如果说你的一个工矿环境啊,灰尘比较多,对吧?那么时间久了之后啊,可能啊,你这个发射端或者接收端被灰尘所挡住了,对不对 啊?那么这个在呃控制逻辑上的话,其实也是有一个弊端的啊,同学们,也是有个弊端啊,那么假如说现在我这个光线接收端,对不对?他被灰尘所挡住了是不是?那么这里啊,他发射的所有光线啊,他反射回来之后啊,因为这边有东西挡住了,所以说他接受不到,对不对?那么他就一直感应不到, 是不是?那么这个时候你的如果说是在一个输送线上面,对不对?那么你的雾量可能就会一直走,一直走,一直走,一直走一直走了,为什么?因为他这里被挡住了,他感应不到,不应该说这里被挡住了啊,那么他这边啊,就相当于呃, 这边一直没有物料过去对不对?所以说这样就可能会造成一个批量性的不良啊,这是他的一个控制逻辑所决定啊,当然的话同学们也不要担心,为什么呢?因为现在我们主流的三 c 啊,锂电半导体对不对?他们大多数都是在无尘车间内运行的,那么像这种车间里运行的话,它的灰尘是非常少的,非常少的, 所以说基本上是不用担心啊,他这个发射端跟接收端啊被挡住啊,那么像这种感应的话,可以说是我们飞哥自动化里面应用的最多最多的感应器之一啊,之一。 那么像这种感应器的话,其实我们还可以上那个欧姆龙去看一下啊,因为它里面是有很多种类型的啊,就说,呃适用于各个场合的啊,那我们来看一下,比如说这个放大器内之形啊, 那么它里面就有这种耐油光电传感器对不对?那么就说它比较呃耐切削液,是不是它适用于这种环境啊?还有这种 i o link 的 光电传感器,那么这种传感器它有一个什么样的好处呢?就说 当它发生故障之后啊,它自己会自检,自检之后的话它会反馈出它哪里出问题了,那么像这种的话,呃,它 那个排除故障啊,是比较简单的,是比较简单的,而且像这种关键传感器的话,它是自带航,自带航空插头的,它自带航空插头,所以说,呃,它换起来啊,也是非常简变的,非常简变。 还有下面像这种透明物体检测的光电传感器对不对?也都是的啊,那么如果说同学们感兴趣的话啊,可以私信老师啊,老师在后台的话会给会给你们发这些资料的,好吧,那么这节课的一些内容啊,到这里就结束了啊,那么如果说同学们还想知道更多关于飞镖自动化方面的知识啊,可以关注老师。好吧,那么同学们再见。 大家好,我是清晨教育卓华老师,本节课我们来讲一下光电传感器里面的一个全反射型光电传感器啊,那么在讲解全反射型光电传感器之之前啊,其实还是要跟同学们说一下,就是这一个慢反射啊和全反射啊, 那么慢反射的话,它就是那个慢反射型光电传感器的一个原理,对不对?那么是利用的这种慢反射的一个原理啊, 是不是来反射这个光线,那么可能他发出的光线是百分之百,那么他反射回去的一个光线可能只有百分之四十或者百分之六十,对不对?那么只有一部分。而全反射型的光线装置,其实他是利用的这种镜面反射的原理啊,镜面反射的原理,那么他怎么来利用这种镜面反射的原理呢? 所以说啊,像这种全反射型的光线装置,其实他一般都会给他配备一个反光板啊,同学们他一 一般会给他配备一个反光板,所以啊,因为给他配备反光板的话,他这个镜面反射,所以说他反射回去的一个光线啊,相比于我们慢反射型来说啊,他的一个光线量啊,就会多很多,对不对?所以说啊,他一个检测距离啊,相对于我们的这一个呃,慢反射啊,他也会远了很多啊,是不是? 但是啊,因为他终究还是靠的反射回去的光线来检测的,他不可能达到像对射性的这么远啊,二十米对不对?那么他这里是只有四点二米的一个行程,对不对啊? 那么这就是,呃回归仿制型,也叫全仿制型的一个光电传感器,呃,但是啊,呃这种光电传感器,嗯,他相对于这种呃对射型的一个光电传感器啊,他的一个检测距离是小了一点啊,精度相对而言也会低一点,但是呢他有一个好处,什么好处啊?就是他好调试啊,同学们他好调试啊, 比较好调试。为什么呢?因为你这种全你这种对射型的关键方式啊,虽然你的精度高是不是?但是你调试的时候啊,你这一个发射端跟接收端啊,你这两个点啊,你必须把它对齐,对不对?你对不齐的话,那么它就感应不到,是不是?所以说首先第一个它调试是比较难调试的,再一个因为你这里是有两个 有两条线要接的,对不对?而这里是只有一条线要接的,对吧?啊?那么这是我们回归反射性也叫全反射性的一个光电传感器的话,他跟我们慢反射型和对射型他们是有一个区别是不是?那么主要区别的话还是在于它调试容易啊, 调试简单,而且的话相对于我们这种呃慢速型的啊,它的精度高一些,减减的距离远一些,对不对?那么像这种的话一般是用在那种输送线上面啊来感应物料的。为什么呢?为什么是用在输送线上面呢?呃因为输送线上面的它的物料的间距啊,一般相对而言啊,相对于这种振动盘里面的,它会 相对于这种矩阵上面,它的它的一个间距会比较大,对不对?而且输送线上面的一个呃距离的话,相对而言的话也稍微远一点,对不对?如果说你用慢反射型的话,嗯,那么可能会存在误判或者感应不到的一种现象,是不是啊? 呃,那么像这种光电传感器的话,首先我们除了要选择它们的一个呃类型之外,其实我们更多的还是要去看一下它们的一个呃类型之外,其实我们更多的还是要去看一下它们的一个检测距离啊,对不对啊?检测距离 那么像,像这个表格里面啊,是都有写明啊,他们的一些检测距离,对不对?那么像这种标准式的他就只有二十米啊,高功率的啊,四十米啊, 那么这种是反射型的啊,反射型的,那么扩散到一米是不是?那么像这种是就就只有三百毫米了,像这种傻那个狭窄式也行啊,那么只有两百毫米的啊,限定反射的话就只有四到五四十五毫米了, 那么回归房型的话,他就稍微长一点,就说这种高功率的就有四点二米,像这种一般的话,像这种透明啊,他这种可以专门来检测透明物体啊,透明目标检测的可以达到一米啊,一米,那么透明目标检测的话,其实也是利用的那个折率 来检测的啊,因为你这个透明物体的话,当这个光线啊,它穿过透明物体的话,其实那个光线就相当于又照射了一次啊,所以说它可以利用这个照射一次的一个光线啊,来检测这里是否有一个透明物体啊,透明物体 啊,那么这里还有我们可以选择一些配件啊,那么其实这些配件的话,主要是一些安装配件啊,安装配件,好吧?呃,还有这的话,我们主要是选择反射器的一个大小啊,还有一些安装方式啊,对不对? 好,那么这就是我们全反射型的光电传感器的一个内容啊,本节课我们来讲一下光电传感器里面的对射式光电传感器啊, 那么什么叫对射式光电传感器呢?其实,嗯,这个我们首先要从这个慢反射型的光电传感器它的一个结构来说起啊,那么在上节课的课程当中啊,其实已经跟同学们啊讲解了这个慢反射型的光电传感器的一个结构,对不对?啊?那么慢反射型的光电传感器的话啊,它是一个,呃, 他一个里面的话,他是有一个光线放大器跟光线接收器的吧,那么老师找一下,那就这里啊,那么这里是有一个发射器啊,就是光线发射器,然后前面他有个物体,然后我们这个物体啊,呃,在这个物体,我们这个光线在物体里面发生了一个慢反射,然后由这个光线接收器啊,来接收这个光线啊,从而来感应到这里的一个物体,对不对? 那么慢反射他的弊端就是啊,呃,他慢反射回去的一个光线的一个值啊,可能比这个呃,发射器 只占发射器里面的百分之四十或者到六十,对不对?那么所以说他的一个精度比较低,对吧?啊,那么所以说啊,我们的对射型的光电传感器,他就跟这个慢发射器不一样了,那么他什么不一样呢?他把这个光线接收器啊,把它放到另外一端了 啊,同学们,把它放到另外一端了啊,所以说啊,我们一般像这种对射型的光电传感器啊,他一般是有两个啊,两个啊,一边是发,这边是发射端啊,这边是接收端啊,同学们 注意啊,这边发射端,那么这边接收端,那么因为啊,他是直接光线啊,从这边发射啊,到这边接收的话,所以说啊,他这个光线的一个接收率啊,是非常高的,非常高的,所以说啊,相对于我们慢反射型的一个感应距离呢,这里的话,他是只有一米的距离,对不对? 我们慢反射型的一个感应距离,他最长大概也只有一米啊,这种还是属于那种高功率的啊,他都只有一米,是不是?而我们这种对射型的话,他的一个感应距离可以达到二十米,对吧?这也是他们性能上上的一个最大的区别啊。 好,呃,那么从他们的一个控制逻辑上来讲的话,呃,其实慢反射慢反射型的啊,嗯,他他他的逻辑有一个非常致命的地方, 那么我们来看到这里啊,这里他是一个光线发射端,这是一个光线接收端,对不对?那么但凡啊,只要这两个端口啊, 两个端口,有一个端口啊,被那个灰尘糊住了,是不是?那么我们这一个,呃光电传感器的话,他就永远感应不到这里有物料,是不是?好?那么比如说我们这里是一个数据线,对不对?然后这里是一个慢反射性的光电传感器啊,那么这个光电传感器如果说他的不管是发热断还是接触断被糊住了,那么他永远感应不到这里物料,那么这个物料就一直走,一直走,一直走,一直走一直走,一直走, 一直走一直走,对不对?那么这样的话可能会产生一个批量性的不良啊?啊?同学们注意啊,这样可能会产生一个批量性的不良,对不对?而像我们这种对射型的光电传感器啊,那么它就不一样,是不是?它就不一样了啊?比如说 这边啊,中间也是输送线啊,输送线上面输送些产品啊,输送些物料产品,那么我们一端是接收端啊,一端是发射端啊,不管是我们这个接收端还是发射端啊,被糊住了,是不是?那么就相当于中间的光线啊,被遮住了,那么像这种 那个对射型的啊?呃,如果说中间,如果说光线被遮住的话,那么就说明中间有物料,是不是啊?那么不管我们发射端和接收端哪一端被糊住了,那么就那么就说明中间一直有物料是不是?那么这个的话,它就会一直感应,一直感应,一直感应,那么一直感应的话,那么它肯定是有,那么在程序上面的话,肯肯定是错误的,对不对?是不是 啊?所以说这个时候的话,它就会报警停机啊,报警停机,所以说从这个方面来讲的话,它就会报警停机,所以说从这个方面来讲的话,它就会报警停机,所以说从这个方面来讲的话,它就会报警停机,所以说从这个方面来讲的话, 好,那么老师再来讲一个简易的应用场景啊,那么就是这种直角啊,同学们啊,就这种直角器, 那比如说这里啊,这里的话,这里的直角啊,他就是用的对射型的光电传感器,那么这里他为什么要用对射型的光电传感器呢?他为什么不用慢反射型的光电传感器呢? 首先的话,我们可以看到像这种对射型的光电传感器啊,它的这个光线是非常细的,对不对?非常细啊,那么非常细的话,就说明啊,它的一个感应精度是比较高的,对吧?它的感应精度是比较高的,那么就算你的这个物体啊, 你的物料他的一个间距比较小,是不是你间距比较小,那么只要你通过这个光线的时候,你这个间距啊,你这个空挡还是会被他感应得到,对不对啊?它的感应精度,它的感应精度啊比较高, 那么像慢反射型的光电传感器在这里会怎么样呢?啊?因为慢反射的话,它是靠那个慢反射回来的一个光啊,来感应到对不对?而慢反射 它的一个呃,感应方向啊,是随机的,对不对?随机的,那么随机的话,那么那么当这里有物料经过的时候,那么就比如说这里啊,就比如说这里啊,这里,它这里它是一个接近传感器啊 啊,就我们打个比方,假如说啊,他是一个慢反射性的光电传感器,对不对?那么当我们下面有物料经过的时候,因为因为我们我们下去的光束比较细,但是我们回来的光束啊就比较粗了,对不对?那么可能这个时候就会误判啊,误判 啊,所以说相比较而言,我们对射型的光电传感器啊,它的感应距离远,它的感应精度高,是不是?而且它的一个控制逻,控制逻辑会更加安全啊?好,那么这就是我们今天的一个内容啊,我们飞镖自动化里面用到的最多的一种光电传感器啊,那么就是槽形光电啊,槽形光电, 那么什么是槽形光电呢?那么槽形光电它的一个作用是干什么呢?啊?那么我们来看下这个样侧啊,呃, 这个啊,他就是一个槽形光电啊,啊,这就是槽形光电,那么像这种槽形光电的话啊,那么他在我们非标准的话里面具体最多的一个作用是干什么? 那么其实就是当那个模组里面的那个感应啊开关了,是不是?那么像我们一般的模组,是不是他一般都会有正负线位,然后再加上一个圆点开关 对不对?那么像这种正负线位和圆点开关的话,我们可以说基本上在百分之九十五的情况下面,我们都会选择这种那个 槽形光电对不对?为什么呢?因为它安装方式多种多样啊,它安安装简面对不对?那么从这里可以看到它的一个安装方式啊,有这么装的,有这么装的,有这么装的啊,多种多样,那么像这种槽形光电的话,我们在安装它的时候啊,其实也有这种装的型材啊,来装,对不对? 不用我们自己去打孔安装的话,那么如果说我们自己打孔安装这一个感应器啊,那么我们就需要算位置,很麻烦,对不对?如果说我们用这种专用的啊,这种感应器的安装型材的话,我们直接把这个型材装上去,然后嗯在上面手动的来 移动这些槽形光电,那么这样的话调制起来就会比较方便,对不对啊?那么其实像这种槽形光电的话,其实他可以说就是对射型的光电传感器,为什么呢?其实他中间这里啊,就有一个光电,有一个光线发射器跟一个光线接收器啊,那么当我们上面的一个覆盖啊, 他下面他上面一般都会固定一个钣金,对不对?那么这个钣金啊,在经过这个凹槽的时候啊, 那么这个感谢啊,就会感应到这个板筋来了啊,从而知道啊,从而知道我们这一个覆盖他的一个位置,对不对?那么这就是槽型光电啊,他在我们飞镖自动化里面用到最多的一个场景啊,也可以说是我们飞镖自动化里面所用到最多的一种光电传感器啊,那么 呃应对不同的安装场合的话,其实这种槽形光电啊,他还有很多种啊,是吧?那么像这种梯形的啊,比如说我这里啊,我这的话其实就是用的其实就是用的这种梯形的,对不对?我们这里的话,其实也可以把这个光电装置这么平着装,对不对?平着装的话,那么我们就需要用到这种紧密安装型啊,紧密安装型 或者这种 l 型,是不是啊?这像这种光电传感器的话,我们在选型的时候,其实主要的还是考虑它的一个安装方式问题啊,那么其他的基本上就可以不用考虑了, 主要考虑安装方式,其他的就不用考虑了啊,本节课我们来讲解一下光纤传感器啊,那么其实光纤传感器啊,它跟光电传感器啊,基本上可以说是一个东西啊,但是他们有所不同的就是啊,我们这个光纤传感器啊,它一般会配备光纤放大器啊, 那么这个光纤放大器啊,其实就是我们光电传感器里面的那个光线发生端,对不对?然后再通过光纤啊,把这个光束啊,把它给照射出去啊,那么像图中啊,这个就是光纤放大器啊,是由他来发射光线,接收光线啊,但是他们之间啊,不同的点在于什么呢?那么这里有一个工况,同学们可以看一下。 好啊,那么这是个步进电机啊,同学们,那么步进电机旋转的话,特别是需要位置控制的时候啊,那么他是需要有一个圆点开关的,对不对?好,那么他这里的话是有一个螺丝,对吧?然后这里的话是配备了一个光纤传感器 啊,那么这里的光纤传感器在这里是怎么来感应到的呢?啊?如果说这里我们用普通的槽型光电或者说感应器来感的话,那么这里必然要配备一个感应片,对不对?那么这个感应片要从那个槽型光电的那一个中间的槽啊穿过去, 是吧?穿过去,那么这个传感器它才能感应到,而这里它是一个螺丝,对不对?好,那么如果说这里我们用普通的那种呃慢反射型的光电传感器的话,那么在这里能感应到吗? 在这里是不能感应到的,为什么?因为当它照射这一个爆鼓的时候啊,好,它感应到这里有物体,对不对?那么当它这个螺丝转过来的时候,那么同样的它感应到这里还是有物体,是不是?那么对于慢反射型的光电传感器来说的话,那么它在这里的信号是不会变化的,是不是? 而这里用光纤传感器啊,用这种慢反射的光纤传感器的话,那么它就不一样,因为光纤传感器啊,它是配备有光纤放大器的,那么它的对于光线的一个慢反射回来的一个预值,它是可以调节的,是不是?那么当它这里一束光线发射出去之后啊,那么 从这个鲍菇的表面啊,慢反射回来的一个光线量啊,和从这一个呃螺丝头表面慢反射回来的一个光线量,他们的 值是不一样的,对不对?那么我们就可以通过这一个呃光纤放大器来调节这个感应值,对不对?那么通过调节这个感应值的话,那么就可以感应到这里一个光线变化量啊,从而来感应啊这里的这个螺丝啊,他到底有没有回原点啊? 好,那么这也是呃光纤放大器啊,慢慢放大器的光纤放大器和慢放大器的光电传感器他们之间的一个最大的一个区别区别 好,那么从他们这个一个感应原理上来看的话,其实呃光纤传感器跟光电传感器他们的逻辑是一样的啊,只不过呃光纤传感器它做一个光纤放大器对不对?那么同样的啊,它的精度会更高一些啊,也可以调节这个感应域值,是吧? 那么从他们的类型上来讲的话,一般啊,也是有对射型跟慢反射型啊,这里应该是慢反射型的,那么像那种全面反射型的有没有啊?有,但是很少很少,基本上只有对射型和反射型 啊,那么从他们的一个形状上来看的话,其实光线传感器啊,他一般也是圆柱形的,也是圆柱形的,那么像这种的话, 像这种的话也是螺纹啊,通过螺纹锁到这个钣金上面来感应啊,来感应这个物体,对不对?好,我们从下面来详细的来看一下, 这种是它的一个螺纹型的,然后这种是圆柱型的,那么圆柱型的话也是通过这个顶丝孔啊,通过顶丝孔来固定这个光纤,对不对啊?还有这种扁平型的,扁平型的话它是比较节省这个安装空间的啊,那么这个是它的光线发射端,然后这边的话也是个光线接收端啊,还有这种套管型的, 那么套管型的话,那么就是从我们这个光纤头上面套个管子,然后我们的光线啊也会通过这个管子啊,然后往下弯曲啊,从而从而可以节省空间,或者说就是那种空间比较狭窄,我们这个光纤啊放进去,那么我们就可以用这种套管型啊,把它弯曲,从而来感应,对不对 啊?那么还有这种无背景检测的啊,其实它就相当于是一个慢反射型的啊,还有这种回归反射型,那么它主要是检测一个透明物体的,检测透明物体,那么回归反射型呢?其实就是,呃,那个我们光电转换器里面的一个全反射型的一个光电转换器,对不对? 好,那么从他们的一个使用环境上来看的话,他这里有这一个耐化学品的,耐油的,还有这种耐热的,对不对?还有这种专门的一个液位检测的,还有耐真空的啊,这是他们在各种不同的一个环境下面啊,所适配的不同的一个光电传感器啊, 好,那么从他们的一个安装方式来看的话,有这种直角型的啊,直角型的,还有这种,还有这种那个圆柱型的,是不是?好,后面的话是他们一个感应距离啊,那么像这种对射型的啊,他们他们的感应距离就达到了两百毫米啊,不,两千毫米,那么就相当于是一个两米的一个距离,对不对? 好,那么像这种普通的话,他们可能只有七百啊,七百,然后或者说一米,对不对啊?那么像那种慢反射型的话,他们就比较短了是不是?那像这种啊,反射型的啊,他这里的一个感应器的话,大概只有一百一十毫米,这里只有四十六毫米,对不对?因为这个跟 光电装置差不多,对不对?他们的反,他们的慢反射型的一个感应器啊,都会比较短啊,都比较短好,呃,这是从他们的一个呃 感应距离跟安装方式啊来讲解的,其实其他地方的话,他们跟光电方向也是比较像的啊,只不过多了一个光纤放大器。好吧,本节课我们来讲一下接近开关啊, 那么首先啊,这个接近开关的话,从它的一个形状类型来看的话,它分为圆柱形和方形啊,那么本节课的话,我们先来讲一下这个圆柱形的一个接近开关 啊,如果说我们从它的一个感应类型来看的话,其实也分为电容式和电感式啊, 那么这个电容式跟电感式它们有什么区别呢?啊?那么首先的话,这个电容式它是任何物体它都能够检测啊,它是通过电场来检测物体的,就说我们的这个电容式的电开关啊,它这个检测头啊,带那个正电,是不是?然后我们的检测物体带负电,那么当他们当 当我们的检测物体接近这个检测头的时候啊,那么就会产生一个电场啊,那么这个时候的话就会产生一个电流,对不对?所以说这个时候我们 p r c 啊,它就会感应到这个物体啊,它是任何物体它都能够检测, 但是就是因为他任何物体都能检测啊,所以说他也有一个比较致命的问题啊,那么什么问题呢?他就是容易发生雾泡啊,同学们, 他容易发生雾泡对不对?因为他任何物体他都能检测吗?对不对?我们空气中的什么啊,灰尘啊,水汽啊,他们是不是也属于物体,是吧,所以说他就容易发生雾泡啊, 那么而且啊,这个发声勿怕也跟这种圆柱形的阶梯开关它这个类型有关,怎么说呢?因为我们圆柱形的阶梯开关它分为秃头式跟平头式啊,那么像图上啊,其实这里就是一个,这边啊,就是一个秃头式的阶梯开关啊,那么这边就是一个,呃,平头式阶梯开关,其实他们还有另外一个名字,什么名字呢 啊?就是屏蔽式和非屏蔽式啊,那么大家可以看到这是一个,这是一个接近,这是一个接近开关的一个样测,对不对?那么我们来看一下啊,我们来看一下,那么像他这种啊,他这种里 面的情况的话,他这里有一个屏蔽型的,那么屏蔽型的其实就是我们这一种啊,平头式的啊,那么像这种屏蔽型的话,他这个检测面啊,可以跟我们的安装面啊,是比较近的,对不对啊?因为 它的这个检测面它只会感应到它前面的物体啊,它侧边的物体啊,它基本上可以感应不到的,所以说我们就可以把它的这个检测面跟安装面啊隔得很近,是不是 啊?那么像这种非屏蔽型的呢,就是这种圆柱型的啊,它这个检测头啊,不,这种凸这种凸凸头型的,它这它前面的这个感应头啊,它是可以,它是会感应到它侧面的这个物体了,是吧?所以说像这种接近开关的话,我们在安装的时候啊,同学们一定要注意啊, 一定要注意它前面那个检测头啊,一定要啊,一定要避开我们这个安装面,不然的话它就容易误判啊,同学们,这是这种凸头式跟呃 平头是他们之间的一个区别,是吧?好,呃,那么从这种感应距离来看的话,嗯,其实接近开关他的感应距离一般都比较短啊,像这种 m 八 m 八他的感应距离都只有两毫米,那么像这种像这里最大的啊, m 三十的也只有二十毫米啊,当然话他也有专用的长行程的啊, 长距离型啊,接近传感器,但是这种长行程的,他的一个长度也只能达到三十毫米,对不对啊?也只能达到三十毫米 啊,那么像这,其实,那么其实像这种接近开关啊,他们的表面啊,是都会有这种细牙的螺纹的,对不对?那么像这种接近开关我们一般怎么安装呢?其实很简单,就直接在我们这个板上面打一个螺纹孔就可以了,对不对?然后我们再把这个接近开关拧进去,是不是?然后再通过这个螺母把它给固定锁紧, 是吧?那当然的话,如果说,呃,你这里的一个震动幅度比较大的话啊,那么可能就不能用这种接近开关了啊,就不能啊, 好,那么除了这种比较大比较大的一种啊,因为这里的话它最小都是 m 十二 m 八的,对不对? m 八的啊,那么还有那还有一种是比较小的一种那个调节开关啊,比如说这种,对不对? 那么它这种的话,它最小有 five 三的一个大小啊,那么当然话它越小,它的一个感应距离啊,它就越近,对不对?那比如说像这种 five 三的啊,它的一个感应距离是只有零点八毫米,同学们,只有零点八毫米啊, five 三 five 四啊, five five 点四, five 六点五,哎, m 四 m 五的好,那么像这种啊,像这种 five 四 five 五 five 六的啊,它们是怎么来安装呢? 那么像这种话,其实我们一般的来,一般来说,一般来说的话是依靠顶丝孔来安装,同学们,我们依靠顶丝孔来安装,那么怎么说呢?呃,就说啊,我们在这里打一个通孔,对不对?然后把我们的那个接近开关把它放进去啊,放进去之后的话,我们在侧边再打一个顶丝孔,然后再通过顶丝啊把这个接近开关把它给固定住啊, 啊?固定住,那么这里就是我们这种小型的进开关它的一个安装固定方式啊,那么通常来讲的话,其实一般来说啊,这种非屏蔽型啊,它的感应距离都要比屏蔽型的要长一点点啊,要长一点点啊, 而且当然的话,像这种,呃圆柱形的这种接近传感器,其实它的一个种类还是非常多的啊,其实我们可以依据我们的一些工况来选型,对不对?那比如说像这种它是用于焊接工装的接近传感器,还有这种耐油接近传感器啊,那么后面呢还有这种防溅型的啊,防溅型的, 那么这种防溅型的是怎么回事呢?就说它的那一个检测头啊,它的表面它是有那种防,它是有那种涂层的,那么什么意思呢?就是说啊,我们的一些那个灰尘什么的啊,它是不容易,它 是不容易在上面沾染的啊,沾染的,因为像我们一般普通的接近传感器啊,如果说时间过久了,那么它那个检测头上面可能会有灰尘,对不对?那么有灰尘之后的话,那么它就很容易发生误判,对不对?那么像这种防溅型的啊,它的表面 它就不容易附着灰尘,对不对?当然的话这种的话也是用于那种环境比较恶劣的一种情况啊啊, 然后的话我们再来看一下啊,除了这种防溅型的,其实也还有其他的一些类型的啊,是不是还有用于高温啊,清洗工序的机器上的啊?这种话一般是用于食品饮料行业啊,还有这种耐腐蚀型的啊,还有这种 铝切削粉对侧型啊,还有这种树脂外壳型,对不对?那么像这种话,我们一般还是根据我们自己的一个工况啊,来选择合适的啊,合适的一些接近传感器,好吧,本节课啊,我们来讲一下接近传感器里面的方形接近传感器啊, 嗯,那么其实这种方形啊,跟这种圆柱形呢,他们的一个区别,仅仅也只是一个形状区别啊,其实他们从他们的一些感应原理来看的话,其实也都是一模一样的,一模一样的啊, 好,那么我们来看一下,呃,这种的话,它就是方形标准型啊,但是同学们注意啊,像这种方形标准型的接近传感器啊,它是都只有那个非屏蔽型的啊,它是没有屏蔽型的啊,同学们注意, 那么像这种像这种接近传感器的话,其实它的一个检测距离的话,跟那一个圆柱形的啊,也差不多啊,也差不多,那么它,嗯最大的一个检测距离啊,也只有二十毫米啊,也只有二十毫米。那么像这种接近传感器,我们最主要啊需要注意的地方呢, 就是他们在安装时候啊,他们的一些,呃,对于周围金属啊干扰的一些安装距离啊,安装距离, 那么那,那么我们来看一下啊,后面啊,就比如说这里啊,如果说啊,这里是感应面的话,那么同学们注意我们下面,我们下面是安装板,安装板,那么这个面啊,离我们这个那个感应面啊,最起码最起码都要有一个三毫米的距离啊,不然的话他就容易误判,对不对?还有这种侧面的距离啊, 侧面的距离,那么这里的话,也必须是一个三毫米的距离啊,同学们注意注意,也必须是一个三毫米的距离,然后像这里的话,他前面这里的一个跟感应面的一个距离话,最起码都是十二毫米啊,十二毫米,那么还有这种互相干扰,互相干扰,那么比如说我们两个接近开关,我们并排把它把它们放在一起的时候,像这里一个 距离的话,最起码都是三毫米,那么像这里的话,像像这种他们两个感应面相对的时候,这个距离最起码都是九十毫米啊。 呃呃,这也是这种方形的接近传感器啊,他们在安装时候的一些要求跟区别啊,要求跟区别啊。当然的话,呃,这种方形的接近传感器的话,他们的安装方式啊,是跟那种圆柱形的不一样的啊,因为他们是通过呃,这这里的孔啊,通过螺丝把它把它们给锁紧了啊, 锁紧的,那么当然的话,其实像这种像这种接近传感器的话,老师一般喜欢用腰孔啊,用腰孔来固定,为什么呢?因为好调节尺寸啊, 因为比较好调节尺寸,那么当然,当然这是这种方形的,那么我们我们再来看一下其他类型的这种方形的充电器啊,那么 还有这种超小型的啊,超小型的,那么这种超小型的话,一般是用在那种,呃,空间很小的地方,对不对啊?那么我们就用这种超小型的,超小型的,那么这种扁平型的,那么这种扁平的话,它是比较扁的,都是依据,每都是依据各种安装空间来设计的,那么其实我觉得最最有意思啊,就是这种,呃,能够啊, 能够自由变更检测方向的啊,就是这种方形方柱型接近传感器啊,它能够自由改变检测方向,那么这个怎么说呢?那么我们来看一下它的一些它的一个样册啊, 呃,那么像这种接近传感器的话,它是有屏蔽型跟非屏蔽型两种啊,这种是有的,而且这种的话从它们的一个呃接线来看的话,它也是分为直直流型跟交流型啊,就是就说它们的一个接线方向可能是不一样的啊,不一样的呃,那么我们来看一下它下面的一些情况啊,情况 它的这一个检测方向啊,它都能够自由改变,看到没有,它前面可以检测对不对,它侧面也可以检测啊, 所以说这种就是能够自由改变他的一些检测方向的接近传感器啊,好,呃,那么这就是关于这种方形接近传感器的一些内容啊,那么如果说同学们还想知道更多关于飞镖自动化方面的一些知识啊, 那么可以持续的关注老师。本节课我们来讲一下磁扇尺跟光扇尺啊,他们的一个作用啊跟使用方法。那么可能有些同学不知道什么叫磁扇尺和光扇尺对不对? 那么其实他们是利用磁信号和光信号来感应啊,来感应来给出信号对不对?那么他们具体有一个什么作用呢啊?其实我觉得他们跟那个编码器的作用是差不多的啊,只不过编码器啊,它是通过旋转啊来感应,而这里它就是一条直线啊,通过直线来感应啊, 好,那么我们来看到这里是一个地轨啊,同学们啊,这是个地轨,那么这个地轨的话,它是通过齿轮齿条来驱动的,同学们,齿轮齿条来驱动的, 嗯,那么同学们应该知道啊,齿轮齿条他们是有背隙的,对不对?那么他们有背隙的话,其实他们的精度相对于我们司感和筒部的总代来说,他们的精度啊,是比较低的,对不对?但是的话,这里的它的一个负载比较大,是吧?负载比较大, 而且它的行程呢,也比较长,行程有一个十二米的行程对不对?那么这么长的行程的话,如果说我们用丝杆的话,行不行啊?那肯定不行,对不对?用同轮同轴带啊,这么大一个负载可可能也不太适合,所以说这里的话,我们就只能用齿轮齿条来来转动了,是吧?但是用齿轮齿条来转动的话,他们有背隙,在这么长的一个行程下, 他们的一个当他们走这么长行程啊,他们的背隙很大,那么它行程越长的话,那么他们的一个误差是不是就会越来越大了呀?对吧? 好,那么虽然啊,我们这里是用一个四伏电机来转动,对不对?我们四伏电机啊,它后面是有这个编码器对不对?但是这个编码器它只能管我们电机它自身的一个精度,对不对?它管不到下面的转动机构啊, 对吧?那么就算我们这个电机的精度啊,加减速器之后啊,它的精度再高,有用吗?它没用啊,是不是因为这个误差啊,是由中间的转动机构所产生的啊,所以说这个误差是避免不了啊,那么避免不了的话,那么我们这里的,我们这里的一个精度啊,需要达到一个四级精度,那么怎么办?怎么才能解决这一个精度问题呢 啊?其实这里啊,我们就可以用到三齿啊,不管是磁齿还是光齿,还好啊,那么这个磁齿和光齿啊,其实他们就可以 实时的来感应我们这里的一个覆盖的一个移动的位置啊,其实这种控制的话,也也也叫做全臂环控制啊,那么像步步电机啊,它没有磁,它没有编码器,那么它叫开环控制,那么步机电机啊,它有编码器,那么它叫臂环控制啊, 那么这里的话,我们有,我们有四部电机啊,有编码器,然后在覆盖移动的方向上面啊,也有这个扇齿来作为它的一个位置监控啊,这个叫做全臂环控制啊,叫做全臂环控制。 好,那么我们来看图片啊,啊,像这个啊,其实就是磁条啊,同学们,这个就是磁条啊,磁条,那么这个磁条的话,一般是用三 m 胶啊,三 m 胶来贴到啊,贴到这一个块上面去,贴到这一个, 贴到这个零件上面来了啊,同学们,从前面,从从他的一个最顶端一直贴到他的一个末尾啊,同学们,从最顶端一直贴到末尾,对不对?那么这里有磁条的话,那么相应的这里就会有一个独树头啊,同学们,有一个独树头 堵住头,那么这个堵住头的话,在这个磁条上面来移动啊,来移动,那么就可以反馈我们这里覆盖啊,他的一个实时的一个位置啊,通过这样子啊,通过这样子来弥补这一个船洞所产生的一个误差啊,但是这里同学们需要注意啊, 这个堵住头的话,他需要跟这个磁条贴的很紧啊,大概只有零点几毫米的个间隙啊,所以说像这里的话,呃,他是有一个腰孔啊,来调节他这里所贴紧的一个距离的啊。 好,那么瓷山尺相对于官山尺来说啊,其实它的精度要差一点啊要差一点啊,像像那个瓷山尺的话,它的精度大概是只能达到六级不,只只能达到四级对不对?四级精度,那么四级四级精度的话大概是一个零点零几毫米的一个概念是吧。 但是啊,相对而言的话磁山尺啊它对于外部环境的要求没有那么苛刻对不对?因为它毕竟是通过电磁力啊来感应的啊。那么像光是像光山尺的话,其实它跟磁山尺差不多啊,只不过一个是通过电信号来传递一个是通过光信号来传递啊, 那么像这里啊像这里啊,其实这就是一个光山尺啊,这就是个光山尺,那么光山尺它同样的它也需要有一个读数图啊, 光山石它同样的它也需要有一个读书头,只不过只不过的话它是依靠的这一个光信号来传递这个信号,对不对?那么就是因为它是用的光信号,所以说它对于这个环境的要求是比较苛刻的啊,如果说你的灰尘水汽比较大的话,那么就会干扰这个读书头啊。 好了,嗯,那么这就是本节课啊,关于光山石和磁山石啊它们之间的一个内容啊,主要啊还是为了实时啊,传递这样的一个直线位的一个位置啊, 好,那么本节课到这里就结束了,或者说,呃,我们这个传感器啊,这个合集啊,到这里就结束了,那么还是那句话,传感器啊,他无非就是为了感应动作, 或者说感应物料感应位置的感应位置的一个作用啊,他在我们飞镖自动化里面的一个应用是非常广泛的啊,我们只需要呃依据不同的工况啊,来选择不同的传感器就可以了啊,我们今天的话,我们来讲一下旋转编码器啊, 那么说到编码器这个东西啊,想必大家应该都很熟悉,对不对?我们在哪里用到见到的最多啊,是吧,那么肯定是在我们四伏电机里面是用的最多的,对不对? 好,那么我们首先来说一下这个编码器啊,呃,它在四伏电机里面它到底起到有什么作用呢?啊,那么其实说白了,其实编码器也是感应器的一种啊,那么编码器的话,它主要是感应啊,我们这个四伏电机啊,它的一个旋转角度的啊,对吧?那么像我们四伏电机啊,它跟步型电机比啊, 呃,它为什么精度会高一些呢啊,那么最一个最主要的原因啊,也是因为我们四伏电机啊,它有编码器,对不对?因为编码器它相当于是一个监工啊,相当于是一个监工,对不对?那么下当我们 prc 啊,它发出命令啊,让我们这个四伏电机啊,让它转个一百度的时候,对不对? 那么可能啊,它只转了九十九度是不是?好,那么这个时候编码器就发现你只转了九十九度,你还有一度没转啊,你给我补偿补偿这误差是吧? 啊,那么这就是,呃,这个编码器的一个作用,那么像我们步星电机的话,因为它没有编码器啊,所以说它是一个开环控制啊,它没有反馈,那么 prc 给它下了命令,让它转一百度,那么它到底有没有转一百度呢?那么那么像我们那个 prc 啊,它也不,它也不知道对不对啊,所以说这就是一个反馈问题啊,反馈问题。 呃,那么像这种编码器的话,除了在这个电机里面用到的话,那么在其他地方还还会用到吗?啊,当然可以用到,那么我们来看一下这里啊,这是一个线材前处理设备啊,那么这里的话,它这个线材它是需要裁剪啊,而且要保证每次线材的裁剪长度是一样的,对吧? 好,呃,那么要保证每次线材裁剪的长度一样的话,嗯,那么我们怎么来保证呢?朋友们想一下 啊,难道我们是通过这个四伏电机来保证的吗?啊,这不一定呢,对不对?因为你这里的话,因为你这里两个轮子他们之间可能会打滑呀,是不是?你这两个轮子他们主要是拉这个线材的啊,他们可能会打滑,所以说用这个四伏电机啊,用它的编码器来保证啊,也保证不了,是吧?好,那么我们来看一下,同学们看一下这个东西是干什么用的?这个东西, 其实这就是一个编码器啊,同学们,这就是个编码器,然后的话,他前面通过这,通过这样一个小型的连轴器啊, 跟这一个纪米轮连接啊,同学们,跟这个纪米轮连接,那么这个纪米轮的话,它的表面是一个硅胶材质的,是硅,是硅胶材质的,然后它上面这个轮子的话,它是一个,呃,它是一个那个金属轮,而且它的金属轮表面还拱花,对不对?那么 这是一个硅胶材质,那么这是一个拱花材质的话,那么就保证啊,这里的线材从这里经过的时候啊,那么跟这两个轮子之间他不会打滑,对不对?那么他不打滑的话, 那么我们就可以通过这个轮子啊,来带动啊后面的编码器来旋转啊,那么编码器旋转的话,那么就可以,呃,比较准确地记录啊,这个祭品轮它所旋转的一个角度,对不对?然后再通过这个祭品轮它所旋转的一个角度啊,呃,来来,换算出来,换算出啊,这里,呃 线材所拉动的一个长度,对不对?因为这个,因为这个轮子啊,它的这个直径是已知的吗?对不对?可以通过角度啊,然后再乘以它的一个直径呢,换出它,换出这里所旋转的一个线长度,是吧?啊,那么这就是它所感应的一个原理啊,希望同学们能够能够记住啊。 那么像这种编码器的话,其实同学们他一般分为哪几种啊?同学们,编码器啊,应该都知道,对不对?那么像这种编码器的话,一般是分为增量型和绝对执行啊, 那么这两种编码器他们有一个什么样的一个区别呢?其实这个也是跟我们电机的一个区别有关,像这种增量型的编码器的话,他一般是需要有一个圆点感应器的,对不对?因为他增量型,他是在原来的基础上面啊,为基础 来增加增加增加的,是不是?那么他是以原来的为基础的话,那么他就必须要有一个基础,对不对?那么这个基础的话,就是我们设置的一个感应器为基础, 而这种绝对执行的呢,他是内置原点的啊, 他所以说他就不需要外置感应器了,他就不需要外置感应器了啊,所以说这也是他们之间的区别啊,那么特别是在我们那种模组里面啊,如果说我们电机啊是绝对执行的模组的话,呃,那么我们一般就只需要正负线位,对不对?就不需要中间的原点感应器,为什么?因为他因为电机他自带原点, 如果说是增量型的那个电机的话,那么他就需要三个感应器,对不对?一个正负线位,然后还有一个原点感应器,是吧?当然的话,相应的那种绝对执行的四伏电机的话,他现在的价格也会贵,也会贵一些,也会贵一些。 呃,那么像这种编码器的话,选型其实很简单,选型的话,其实我们只要看一个它的外镜就行了,看一个外镜,那么它的外镜的话,其实也是主要根据我们一个安装位置啊来看的来看的, 那么像这种增量型的编码器的话,它有一种这种,呃,中空型的中空轴的,那么这种中空轴的话,我们是直接把这个轴啊插到我们这个编码器里面去啊,这种的话,其实在我看来的话,它是不需要连轴器的,这种是比较方便的啊,比较方便啊,这他们之间的一个主要区别,也是他们的一个大小和安装方式的一个区别。好吧,本节课我们来讲一下行程开关啊。 呃,那么在老师看来的话,其实行程开关啊,它的一个作用啊,跟光电传感器啊,呃,它的作用啊,在某些地方是比较类似的啊,特别是在做模组里面的一个线位,或者说是圆点的时候啊,是更加的相像啊。 呃,那么像这种行程开关啊,其实它的一个感应原理是通过啊,把物理信号转换为电信号,从而传给 prc 啊, 好,那么这就是一个行程开关的样侧,对不对?那么这里的话就是,呃行程开关的各种型号啊,那么他们一般啊,都是通过撞击啊,撞击转动这个白杆啊,让这个白杆发生摆动啊,从而产生一个电信号啊,那么这个电信号的话再传给 plc, 那么我们就知道这里有负载来了,对不对?那么这就它的一个感应的一种原理和方式啊,那只不过像这种行程开关的话,它的一些应用场景,同学们想一想,它跟光电传感器有什么区别呢啊?这种物理的方式啊,来感应的话,那么它是不是就比较 耐久啊,就比较经用是不是?而且对于对于环境的要求对不对?也不挑,是不是?那么比如说像那种, 呃光电传感器啊,它需要在灰尘不多的情况下使用,对不对?如果说你灰尘比较多的话,那么就可能直接把这个光电传感器它的一个光线发射端或者说光线接收端给糊住了是不是?那么这个时候的话,那么这个光电状态下,它的光线就发生就发生不出去了,或者接受不到, 而像这种行程开关的话,它是通过覆盖来撞击它这个白杆,那么就不就不会存在这个问题啊。所以说像这种,呃行程开关的话,它一般是运用在那种恶劣环境下使用的啊,就比如说灰尘较多啊, 这种情况下啊,那么当然的话,一般在我们三 c 或者锂电设备上面其实是用的不多啊,用的不多的一般是用的那种比较大型的设备,或者说他是他的那个震动比较多啊,比较多。 那么从他们的一些类型来看的话,呃,首先第一种是它上面有这种圆头的摆针啊,第二种的话,那么就是它上面就是一个光秃秃的啊,光秃秃的啊, 有这种啊,旋转白杆型啊,有柱塞型,有触须型,有叉式锁定白杆型等啊,多种头部形状啊,那么这种的话,我们主要是根据我们自己的工况啊来选择来选择,那么像老师的话,一般是用的最多是这种,是这种,为什么呢?因为这种它接线啊,好接,它指的是个横插,对不对?你不用接线。然后的话,呃,它上面的这种, 呃旋转白柱型啊,也是最常用的,也是最常用的啊,那么当然话它下面还有那种密封型的啊,同学们, 还有这种密封型的啊,它这种的话是开关内置的话,然后通过这种橡胶啊,来密封它里面的那些电子原件啊,这种的话一般是用的那种灰尘比较多的地方啊,这种的话,因为它是比较耐酒精用的,对不对?当然同样的它这种的话成本也是比较高的,但是同学注意啊, 这种开关啊,它的形成一般都比较短啊,像它这里一个玉形成只有一点七毫米,这里还只有二点八毫米,对不对? 行程都比较短,就说他们一个摆动的幅度啊,都不会很大,对不对?都不很大。当然如果说同学们想要那种摆动幅度稍微大一点的啊,可以用这种啊,用这种微动开关啊,这种其实也是属于行程开关的一种微动开关,那么当我们的复杂穿过这个 呃开关的时候,那么就会把他这里往下压,那么把这里往下压之后的话,那么他就会按压这个按钮,那么这个时候的话也会产生一个信号,对不对啊?那么这也是属于一种行程开关,那么但是我还有一种比较特殊的行程开关,那么就是这种高精度型的,高精度型的开关,那么这种的话像他的一个呃精度可以达到六级啊,六级, 但是的话他这里一个所使用的一个场景的话,比如说这里啊,一般是这种感应,这种位仪台啊,这种高精度的位仪台,我们在侧面啊,给他装这种行程开关的话,那么就可以感应到他到底有没有在移动啊,移动 啊,还有这种检查,我们这这这种啊轴的零件的一个同轴度的,对不对?我们在侧面装这个呃呃行程开关,那么当这个轴啊转动起来的时候,如果说它不同轴的话,那么 那么我们这个斜开的话,那么它就会被就说呃被挤压,对不对?它就会感应到它的一个跳动啊,还有这里啊,六角车床所用的一个位置确认啊,把它装在侧边啊,也可以来感应到,那么从这里可以看到它的一个重复定位精度啊, m 五的它的一个定位精度可以达到一个 m, 那 么这里还有三个 m, 这个精度来说是非常高的一个精度啊,非常高的一个精度啊,好,那么这是它的一些类型啊,那个针状柱塞型,还有这种顶部柱塞型,还有这种斜角柱塞型啊, 那么从这里的话都可以看到它的一些形状形状好吧,那么如果说同学们有呃需要的时候可以来看一下这样子啊,如果说同学们想要这个样子的话,也可以关注我啊,在后台私信老师找老师要,好吧,那么本节课的话,我们来讲一下这种卫仪传感器啊,呃,那么说起这个这种卫仪传感器的话,那么其实卫仪传感器它一般是分为两种啊, 一种是接触式的微传感器,还有一种是非接触式的微传感器,那么像这种非接触式的微传感器的话,它一般是利用的激光测距啊,激光测距,那么这种接触式的微传感器的话,它是利用的物理的方法来顶它那一个 感应头啊,来检测它的一个距离啊,那么我们先来看下这个样测啊,那么这就是一个接触式的微传感器的一个样测啊,那么其实我们首先来看一下它能它的一个检测精度啊,同学们, 那么我们可以看到他最小的一个检测精度大概是在零点一个 mill 啊,零点一个 mill 啊,那么这种精度是非常非常高了啊,同学们,是非常非常高了, 那么他这里是怎么来检测呢?啊?那么这里啊,就是这里的一个胃腔的线,对不对?那么他前面啊,他都是有一个头的,有个头的,那么要么啊,要么是我们固定这个头子啊,往下压啊,或者说啊,我们的物体来压这个头子啊,是通过挤压胃的方式啊, 来检测啊,他的一个精度变化啊,对不对?好,那么我们来看一下他这里的一个使用案例啊,那么这是一个软包电芯啊,一个测量的设备要测量这个软包电芯他的一个长宽还有厚度,对不对?那么我们首先来看啊,呃,这里的话是测量他的一个长度啊,测量他的长度, 那么测量它的长度的话,那么首先啊,这里啊就有两个位传感器啊,同学们,注意,这里就有两个位传感器,那么同学们有没有注意到啊,那么这个位传感器的话啊,呃,它是顶前面这块板,对不对?同学们, 是吧?它来顶前面这块板,而前面这块板的话,它又会去顶这个电芯啊,同学们, 前面这块板他会过来顶这个电芯啊,当这个电芯顶不动的时候啊,那么就是这个电线的长度,对不对?而这个时候的话,我们这块板啊,我们这两块板,你看这两块板是不是那么肯定也都会对这个外移传感器进行一定程度的挤压, 是不是?那么再通过这个挤压的纸啊,那么就可以换算出我们这一个接近就可以换得出我们这个电芯它的一个长度了,对不对啊?那么这里就是一个接近传感器的一个使用和用法,用法那么像它这里的一个安装方法呢,很简单,它中间是有螺纹的,同学们,它中间是有螺纹的, 那么在这里的话,其实我们也可以来看到啊,他中间这一段他是有螺纹的,那么有螺纹的话,其实我们就可以弄一个龙孔把它给锁到里面,对不对啊? 那么像他这的话,因为他这个东西可能,嗯,他这里为了确保他的一个精度,对不对?所以说他左右两边啊都装了啊,都装了,那么为什么呢?他可能一边压的时候,他可能一边,他每一边的那个精度可能不一样,对不对? 或者说他每一边啊,他压他的一个位量都都不一样,所以说他两边都测啊,然后取个平均值,确保他的一个精度啊,好,那么这是测他的一个长度啊,那么同样的这边的话,其实就是测他的一个厚度啊,同学们,这边啊就是测他的厚度啊, 那么这边的话也是一个气缸啊,这个气缸前面啊固定这块红色的板,对不对?那么这个红色的板上面就就有这块青色的板,那么这个青色的板的话,那么呃就会就会 挤压到动不了,之后的话,那么就是这一个电池它的一个宽度,对不对?那么这个时候的话,呃,这个时候这个红色的板就会挤压这个未传感器的一个检测头,对不对?那么这个未传感器的话,它也会产生一段未移啊,那么再通过这段未移啊来 换算出这一个电池这个电机它的一个宽度,对不对?好,那么这里厚度,这里其实也是一模一样的,同学们,厚度这里也是一模一样的啊,这里下面的话,也是有一个呃卫衣传感器啊,那么上面的话是有个压板,对不对?那么这个压板往下压啊, 压到压不动之后的话,那么就是这个电线的一个厚度,对不对?那么是它的厚度的话,那么呃这个压板的话,那么它就会对这个检测头啊产生一定的误差,那么再通过这个误差来换算出它的一个厚度,对不对啊?那么这就是这种方形的不,那么这就是这种接触式的微传感器,他们的一个用法, 简单啊,还是比较简单的啊,而且精度又高,是不是?好,那么我们再来看到那种非接触式的微移传感器啊, 非接触式传感器,其实这种的话,它是依靠的激光测距啊,那么像这种啊激光测距的它的精度会更高啊,那么同学们可以看到这个是欧姆龙的一种高精度的激光测距的一个位传感器啊,高精度的光纤同轴光纤同轴位传感器, 那么像这种卫仪传感器的话,他们他他的分辨率达到了两纳米。同学们,两纳米,两纳米啊,两纳米,这个精度已经不用我说了吧,但是其实这种这种激光测距的卫仪传感器的话,其实基本上已经 我们可以说已经用不到了,用不到了,为什么?因为他的精度太高了,精度真的是太高太高啊,那么当然话这种他的一个呃成本也比较高啊, 它是利用了一个激光测距的原理,就说我们发射一个激光啊,然后再回来,那么这一来一回之间啊,其实就可以来测定它的一个距离,对不对?那么那么这里的话是还有其他种类的,我们来看一下啊,还有其他种类的, 呃,传感器,卫衣传感器啊,这种卫衣传感器啊,那么这种的话是高精度的啊,高精度的。那么我们来看一下普通的卫衣传感器啊, 那么像这种的话,它的精度其实相对而言就没那么高啊,同样呢,它的成本啊,也会比较低一点,对吧?那么像这种传感器的话,他们一般也是可以达到一个 一个 mu 的 级别啊,达到 mu 的 级别,当然的话,这里除了这种激光传感器啊,来测量它的一个呃位之外,其实也还有那种形,也还有那种测量形状的啊, 还有测量形状的,对吧?那么比如说啊,像这种测量它的一个平面度啊,是吧?测量平面度的啊,也可以,也是也是非常好用的啊,这个比较慢一点啊, ok, 好。 那么像这种激光测距仪啊,它们的一个检测长度其实也都有限的啊,因为看这里啊,它的检测长度大概只有一百五十毫米,对不对?那么像这种的话,它的检测距离就只有那个一米啊,最大也只有一米啊,一米 啊,那么其实如果说像刚才那个工况的话,我们用这种激光测距仪啊,我们能不能测呢啊?我们当然可以测,对不对啊?只不过啊,就是由这种接触式的改为非接触式的吧,那么比如说啊,我们直接啊把这个东西啊,把它换成一个激光测距仪啊,我们通过测量这个面的距离啊, 我们通过测量这个面的距离啊,从而来,从而来推算出他的一个,从而来推算出他的一个那个长度,对不对?当然的话,像这里啊,朋友们,像这里的话其实就不用那么麻烦了,这里, 因为啊,因为这里的话我们主要是测量它的侧面对不对,而它的侧面的话,它并不是一个平面,所以说我们还需要借助东西来推啊,那么像像测量它的厚度的话,我们直接啊在上面摆一个激光测距仪啊,就是摆一个那个非接触式的微创器啊,直接往上面,直接往上面一拍 啊,直接光线往下往下面一照就可以得出啊,这个面跟激光测距的一个位置,是不是那么得出来之后啊,就可以通过换算啊,得出它得出这一个呃,电池它的一个厚度对不对?像这种非接触式的,它的一个我们在使用的时候,它的结构啊会更简单一点点,会会更简单一点,好吧, 好,那么这就是我们关于位仪传感器的一个内容啊,那么如果说同学们还想知道更多关于飞镖自动化方面的知识啊,那么可以持续的关注老师,老师后续也会分享更多啊知识,好吧,那么同学们再见。
761非标自动化教学











猜你喜欢
- 2528私有云存储
最新视频
- 1833xzy