fanuc机器人abort指令怎么设置

粉丝1609获赞5470
相关视频
 07:07查看AI文稿AI文稿
07:07查看AI文稿AI文稿大家好,今天我来给大家讲一下发纳克机器人 ar 寄存器的使用方法。首先, ar 寄存器也叫自变量寄存器,它是主程序和子程序之间的参数传递的一个关键工具,它的值只能在主程序调用子程序时通过 call 指令参数传入,具有局部性,不同 t p 程序的 ar 不 能交换使用 以及不能被复制。它的指令格式也非常简单,就是在调用 cos 程序后面的括号里面写入需要传入的参数。 其次,传入的参数序号与其 a r 寄存器的序号是一一对应的。然后支持的参数类型有多种,如图所示。我们来看个例子,这里就是主程序调用子程序的 a r 的 程序。图一,首先将一副值给数值寄存器 r 一, 再调用子程序,将 r 一 传递给图二的子程序, 然后子程序的 ar 寄存器依旧得到了二一的值,通过判断来进行对应的输出。接下来我们来仿真里面举例子,看看自变量寄存器具体用法。这里我们需要创建一个主程序和子程序,我这边已经创建好了, main 是 主程序, g 九九九是子程序。我们先进入子程序里, 这里我随便添加几个变量作为演示。点击指令,我这里选择数值寄存器,这里我用第一个格式点击数值寄存器, 选用二一,然后右边选择自变量寄存器,在最后一页找到 a r, 我 选择 a r 一, 我们继续添加指令数值寄存器,这里第二个就使用一个字母串寄存器, 选一,右边写入自变量寄存器,二, 我们再添加 用数值寄存器二, 写入 a r 三,这边以三个字变量寄存器为例子, 然后我们回到主程序,然后我们开始调用子程序,点击找到刚刚的子程序 g 九九九,这个时候我们需要点击下面的选择, 然后我选择常数, 第一个参数就设置为十,接着我们继续点击选择添加参数,然后选择字母串, 我就选第一个格式,然后继续添家长数,设置为一百,我再添加一个参数, 长数两百。好,到这里我们一共设置传入参数有四个,但是刚刚我们设置的 ar 寄存器只有三个,我们来运行一下试试看。这里为了演示看数值效果,调成双画面, 右边为寄存器的列表,方便看传递数值变化。 好开单步,我们来运行一下, 我们一行一行来看,开始运行好,进入此程序,继续运行,可以看到右边数值寄存器一的值已经变成了十,也就是我们主程序的第一个参数值,我们继续运行 好,我们再来看看这个字母串寄存器的值变化,我们切换到右边点类型,点击字母串类型,可以看到右边 s r 一 的值已经改变,我们再切换回来看 r 三, 好,我们继续运行,可以看到右边的 r 二变成了我们第三个参数值一百,然后继续运行,我们又回来了主程序,而我们是传入写了四个自变量参数,说明我们在此程序中是可以不使用所有参数的, 并且传入参数的顺序是和 ar 一 ar 二的顺序是对应的。接下来我们来试试可不可以跳着来使用 ar 寄存器,就以这个没用到的第四个参数两百为例,我们回到子程序, 现在第一行的是 ar 一, 我们把它直接改为 ar 四,然后我们再回到主程序来运行一下,我们还是单步运行 好。进入子程序,我们注意观察右边二二一的值,点击运行可以看到 ar 四的值为两百,二一的值也为两百了。再次说明,你在主程序里传入参数的顺序和子程序里面的 ar 一 二三顺序是对应的。 接着我们再来试验一下,如果传入的自变量参数少于子程序里面的 ar 数量会怎么样, 我们给后面的参数取消。 好,这里我就只留了一个自变量时,我们来运行一下, 为了效果,这里我先把第一行 a r 四改为 a r 一, 继续运行好, r 一 的值刷新为十。好,可以看到发生了二八八报警,说明我们的传入自变量的数量只能多于使用的 a r 寄存器的数量。 包括这里,我们如果不传入参数,直接调用带有 a r 的 子程序也是会报警的,这就是自变量寄存器的用法, 这里我们来做个总结。首先 a r 寄存器不允许进行直接赋值。第二, a r 只能由自变量始化,刚刚有演示过,否则会报 i n t p 二八八报警。三系统一共三十个 a r 寄存器,但是一次传递最多只能写十个进去。 第四就是字母串,参数长度限制为一到三十四个字母。然后这里举例了一些自变量参数的一些应用程序, 它也有很多种写法和用法,具体看大家实际去写程序,大家可以暂停几秒看看。好了,今天就讲到这里。
 01:02查看AI文稿AI文稿
01:02查看AI文稿AI文稿我们讲解一下法纳科的编程,首先我们来创建一个新程序,来选择 a 二二二确认一下,然后把我们的主页码这个改成信号,好,结束来,我们现在第一个点, 按进 f 一 勾确认一下,然后再去我们的焊接点,我们把机器人走过去, 然后再定一个勾,把光标移到这个的后面,然后按 f 四选择一个焊接,开始引弧,一杠一,输入我们的工艺号,然后把机人往这边走,选择我们需要焊的焊缝, 然后给一个 l, 好, 把光标移到他后面,给到一个焊接结束,再给到我们焊接结束的工艺号 好,把机器人抬走,再定一个点,定安全点,好,这是就是我们的简单的焊接程序,我们再走一下。
61轩烨机器人 00:31查看AI文稿AI文稿
00:31查看AI文稿AI文稿程序可通过试教器进行修改,程序的编辑包括对指令的添加、修改、删除、复制等操作。 在程序编辑界面,按下 f 一对应点功能,进行动作指令的添加。如需其他指令,按下 f, 进入到功能键的下一页。选择指令,可添加其他程序指令。 选择编辑,可对指令进行插入、删除、复制等操作。关注我,学习更多工业机器人知识!
 02:05查看AI文稿AI文稿
02:05查看AI文稿AI文稿大家好,今天给大家讲一下发纳科机器人程序偏移,当我们一个机器人有两个工位时,如果两个工位是相同零件,试校好一个工位的程序后,另一个工位的程序可以通过程序偏移来得出,这样大大的减少了工作量。 来看一下具体操作,这个是我们建好的第一个程序,现在我们通过偏移来得到旁边弓箭的程序, 先按下 menu 菜单,选择第一个使用工具程序偏移,一是我们要进行偏移的程序范围,根据实际情况选,这里选整体新程序名字改成我们偏移后的程序名, 设置好后翻到下一页,不带旋转状态。 off 原位置,机器人移动到老公键上,找一个特征点记录目标位置,机器人移动到新弓箭同样位置记录,然后执行就得到了偏移后的程序。 这里我们已知弓箭相差的距离,所以用直接法输入新弓箭对比老公箭 x、 y、 z 的 距离, 填好后执行执行变换选择式等待执行完成。可以看到偏移后的程序了,运行一下看看效果, 可以看到轨迹没有问题,原点也被偏移过来了,我们给它改掉, 感谢大家观看。
1335工业机器人调试应用 02:12查看AI文稿AI文稿
02:12查看AI文稿AI文稿大家伙上次讲的程序偏移,看到评论区小伙伴在讨论用户偏移,今天就给大家简单的讲一下用户坐标系偏移。如果我们创建了用户坐标系,当我们工作台发生变动,可以通过重新校正用户坐标系来找回轨迹。当我们有两个相同的工作台时,也可以通过在工作台上建立相同用户坐标系来进行程序偏移。 不管是工作台发生移动还是偏移到另一个工作台,都要确保用户坐标系的原点基本一致,这样我们得出的程序轨迹修改量就会减少。接下来我们看一下具体操作。 首先我们去创建用户坐标系,按下菜单设置坐标系,点击其他切换成用户坐标系,选择一号,点击详细方法选择三点法,找好原点,原点要找容易找到的,因为涉及到下次还要找的, 记录好坐标原点。接着把 x 方向 y 方向点设置好,这里不过多演示。 然后我们把第二个工作台的坐标建立好,这里我们坐标原点就尽量建到一样的位置,同样建好 x y 方向。然后我们去一号工作台建好轨迹。首先把用户坐标系定义指令加上, 选择一号坐标系,建好轨迹, 可以看到所见的点位是带的用户坐标系一,然后我们去把这个程序偏移,得到旁边工位的程序,点击菜单,使用工具坐标系偏移,选择要偏移的程序,改好新程序的名字, 设置好后翻到下一页,填好做轨迹的用户坐标系一和新的用户坐标系二,注意转换位置数据。这里填否选择式的话是指改轨迹的用户坐标系并不会偏移,设置好后点执行完成好后我们去看看程序轨迹是否正确, 这里把用户坐标系改成二号运行程序,看看效果。 圆点也偏移过来了,改一下就可以了。今天的讲解就结束了,如果有不对的地方或者更好的方法,欢迎大家在评论区讨论。
409工业机器人调试应用 08:13查看AI文稿AI文稿
08:13查看AI文稿AI文稿大家好,今天我来讲一下方纳克机型的系统变量,然后我从四个方面来给大家讲,一个是它的定义和作用,然后第二个在试销器里面怎么查找修改它的值, 第三个就是在程序里面怎么写入系统变量,然后进行一个读取,然后第四个就是,呃,我举例了一些比较简单常用的一些系统变量。我们先来看什么是系统变量, 系统变量就是控制系统内置的特殊变量,它统一以美元符号为开头标识,这个就是发那个机器人最显著的特征, 然后它就是用于存储和控制系统它的运行状态,然后还有它的配置,还有它的参数、功能开关,都是跟它的这个系统变量相关的,就是和,就是一个机器人底层控制系统的关键的一个交互接口, 这边就是它的状态读取、配置,修改,它的编程以及它的功能拓展,都是可以在这里面去查看的。然后我们来看一下系统变量的查看和修改,在试销器里面怎么去找, 然后第一步我们先点击 menu 键,然后进入这个菜单界面,点击这个零下页,然后找到这个六系统,然后右边有个二变量,然后我们点进去, 然后这个呢就是系统变量的一个画面,这里面有八百多个,这个就全部都是他这个系统变量带美元符号开头的,然后这个就是他的一个名称,然后右边就是他的一个值或者他的一个状态, 然后如果我们想要修改呢,我们就直接在右边这边直接点进去,然后就直接修改他的值或者他有值菜单的话就是直接点进去,还有别的一些变量。好,这个就是在社交器上怎么去查看和修改,然后我们来看一下系统变量在系统在程序里怎么去。嗯,写入 第一个方法,我们直接进入它的一个一个 t p 程序,然后,然后我们在这个下面有一个指令,点击,然后七其他,我们点击它这个七其他, 然后这时候它第二个画面就会出来一个 parameter name, 一个画面,我们点击这个指令,然后它就出来了一个调用系统变量。一个格式。啊,有的是第一,我们就选第一个为例,美元符号在前面, 然后点击完以后我们再点击这个选择,然后它就会出来一些呃,它自带的一些系统变量,然后我们就选择这个第二个 wait mount 为例, 然后点进去以后右边再把光标移到右边,就是对它这个变量进行一个赋值,然后它这边的支持的格式有常数,然后自变量计算器,呃, r p r 这些都可以支持,然后我们就随便输了一个十,这个变量的意思呢?就是, 嗯,等待满足一个 i o 信号或者一个指令,如果超过这个十秒钟时间还没满足的话,他就会触发一个报警, 就是这么一个意思,然后右边就是一个稳定,用它自带的一个系统边写好的一个语句。然后第二个方法呢?就是,呃,因为刚刚那些系统变量如果没有我想要用的,因为他只有几个嘛。然后我们就用第二个方法,就直接在这个画面 他写格式,这个画面直接不点击这个选择,然后直接点击摄像机的 enter, 然后就可以进入这个打字的一个界面,让我们选择其他键盘,然后直接就在这里打出你自己想要的一个变量,直接打出你想要的一个变量就可以了, 然后这边就是你看打完变量名称以后,然后在右边再进行赋值就可以了。然后这边就是列出了一些常用的系统变量, 然后第一个呢就是呃,这个他发那颗特有的一个编程语言,这个变量你在那个系统变量里面是可以找到的,然后它是可以显示,打开以后就是显示它是否它的一些程序的变量 一个默认。第二个呢就是前面之前视频讲过,它是一个零点标定的一个显示控制功能,如果你改为一的话,就是开始选 啊有这个功能。第三个的话就是这一个手动的最大倍率限制,他默认是百分之百嘛,然后这个我们需要在启动模式下才能修改,在普通模式下是修改不了的。 第四个就是他的一到六轴,第五个就是他的一些旋转,这个 x y j w p r 的 一些数据角度, 这两个变量呢就可以通过与 plc 交互,把自己的一个位置进行在程序里,程序里进行赋值,一个程序指令可以 把自己的一个坐标位置发送给,然后最后一个呢就是之前念念标定也讲过,就是这个就是一个参考点,编码器直接可以把六轴的一些六轴它原始的编码器数值给输进去, 然后这个呢就是慢。第一个变量就是脉冲的输出时间,在程序里是有这个指令,他默认的话是四秒钟,然后在变量里是可以直接改的。然后第二个呢就是坐标系更改的功能,这个其实挺实用的,因为就是 你原本程序里有很多运动指标,他有时候用的不是一个坐标系,比如你的工具和用户他的坐标系使用不同,如果你在第一行想要运行程序的时候,你改变了这个呃工具坐标系或者用户坐标系, 然后你再运行,他是会报错的,因为那个坐标系他不符合,但是你把这个变量改为二以后,他在运行的时候他是能运行的,他就可以帮你自自动改变你这个所使用的坐标系。 然后第三个变化就是每个轴它的类别选择,它默认的话就是一到六轴都是为 q, 因为它是旋转轴嘛。 然后第四个就是它的一个 i o 信号点配置的一个系统变系统默认是五百一十二点,我们可以增加它的这个 i o i o 这个信号点的配置改为更大一点或者小一点的,就这个数字输出输入什么。 第四个呢?第五个就是这个计时器,他的数量配置,他默认只有二十个计时器计算器,然后你可以把它改多一点,修改以后要充气才能生效。最后一个呢就是倍率,倍率的系统电量他默认值也是为一,你改为零的话,就可以按百分之五的增量就是慢慢的给他加这个 程序,调整它的倍率。然后这第一个变量就是一个艾特,它这个职称,它默认值十为一,如果你设为零的话,它就是在运行程序的时候,它到达哪一行,它是不显示这个前面的艾特符号的,然后这边就还有一个单人单步,单步的系统功能, 然后后面就还有这个 pr 位置计算器的运转功能,这个奇用的变量,这些上面说的这些所有变量都是在刚刚讲的在吸热器系统里查看,都是能修改它的一些值。 然后最后呢这里还有一些速度配置控制的这些变量,这里就不多讲了,这里是一些安全门啊,以及它的高速运转,这些都是可以大家可以去验证去看一下, 都是可以在那个系统变量里能找到。然后这里还有一个呃范围指令的精确度误差值,它默认值是零点五毫米,如果你想让它你这个程序里面范围指令它精度更高,你可以找到这个变量,然后可以把它改为零点一、零点二,然后修改完重启机器人以后就可以生效。 然后最后一个呢就是呃一个脉冲复位,这个指令就是跟前面那个零点标定它那个选项下面也有这个变量,就是这个底层逻辑就在这,它是用于零点矫正的。 然后这边就是有一个权限与生效的规则。呃,有的系统变量它是必须在控制启动模式下才能修改,普通模式下是无法修改的。 然后有的呢就是要重启,修改完要重启机器人才能生效。有的呢就是修改完就是不用重启。然后有的呢是属于只读变量,他是禁止对变量进行写入程序以及赋值的,不然他就会进行一个报错,然后这个右上角呢?是 啊,就是因为他肯定是不止前面那么几十个的,这是一个官方的一个系统变量,如果有需求的话,大家可以点个关注,然后在评论或者后台私信,然后今天就讲到这。
214郭郭郭郭郭郭 02:06
02:06 04:32查看AI文稿AI文稿
04:32查看AI文稿AI文稿大家好,今天我来讲如何在仿真里搭建点焊工作站,然后主页里有一个技术交流公开群,感兴趣的可以进群交流学习。进入建立工作站界面,这里我们应该选择标准憨德令工作单元四伏焊枪,点焊属于搬运类拓展,然后这里我们就随便更改一个名字, 下一步新建,下一步我这里就选最高版本, 这里我们就需要选择 h 五九零,选择点焊的应用,然后右边也可以选择它的焊枪,这里我们选择稍后选择, 这里就是选择我们的一个机器人,我们随便选择一个。下一步这里我们需要添加一个动作组, 因为点焊焊枪也属于我们的一个外部轴,然后我们要找到 h 八六九软件选项,我们翻找一下, 找到了,在这里我们点击,然后我们需要把它添加到下面的第二个动作组,本体六轴是第一个组,所以这里从二开始点击下一步, 然后这里我们也要找到四幅焊枪对应的软件包选项。 j 六四三,我们直接搜索,就是这个我们勾选,然后点击语言里面把加选词点选中文,下一步 到这里我们就设置好了,我们点完成,然后我们就耐心等待就好了, 这里我们自动进入了一个控制启动模式,设置参数,这里选择一。标准法拉盘, 这里我们一般就是选一, 这里就是选择它的第几个轴,除了本体六轴附加轴,我们从七开始点确定,然后这里依旧是修改四幅焊枪选项,二是增加,三是删除,四退出, 这里我们就选二,这里是选择参数配置是对所有的还是部分的,因为这里是仿真,很多参数还是要跟实际来,我们就选一部分参数设定快速搭建, 然后这里也是选择电机型号,这个也是根据你实际电机型号来选择,这里我就随便选择一个点确定,这里就是它的放大器编号本质六轴是一个附加轴,我们一般就选第二个 输入二,然后这里就是选择它的爆炸号,我们选择零,这边四伏焊枪是没有爆炸的,到这里我们就设置好了,我们点四退出点确定 这里,我们仍然等待即可。 好到这里我们就是工作站建好了,我们这个时候去给它添加一个四腐汉枪,我们点击左边机器人展开, 然后工具再展开,然后我们右键选择开的模型库添加工具, 好在这个系统自带的模型库里面,我们找到左边的 spot hands 点焊焊枪,这里面就是有一些焊枪模型,有 c 型的,有 x 型的,我就选择第一个点确定, 这里就可以看到焊枪就已经装在了机器人身上,我们也可以在里面设置它位置以及查看工具。 tcp 可以看到它的 t、 c、 p, 就是 在两个电极的接触中心点好了一个四副焊枪,点焊工作站就搭建好了,后面就是可以正常搭建工装工件以及试教器,里面也会有点焊的各种选项参数和指令,今天就讲到这里。
 01:54查看AI文稿AI文稿
01:54查看AI文稿AI文稿上辈子作恶多端,这辈子早起上班,条条大路通罗马,你我非要当牛马!大家好,我叫公司顶梁柱,是厂里一名九零后电工师傅,看看今天又碰到啥问题了, 这个发那颗机器人附带抓手工具,他正常的时候是这样, 还有这样,现在却变成了这样,烦死了!收到收到,我马上处理。 这个叫换枪盘电器模块,在附加抓手测的叫工具盘,简称母盘。在机器人测的叫主盘电器模块这里简称公盘,这里公母盘是相互配合接触的传递电源和通讯信号,枪盘进行接触后,抓手工具测电器模块就会接通电源和通讯反馈。 公盘上是十六根弹性插针,这些插针在粉尘车间长期使用常见,会出现卡制和磨损,这会导致公母盘接触不良,最终引起工具盘上的抓手模块电源异常,通讯反馈中断。 最终检查出公盘插针存在卡壳的问题。有这样回弹力不足的,还有这样断针,坑爹的啊啊啊, 说多都是泪啊!接下来进行本期视频总结。换枪盘插针公母头频繁接触分离,且在粉尘车间长期工作,会出现卡质和磨损现象, 日常维护使用电子清洁剂清洗,预防性维修进行磨损插针更换。本期视频到此结束,感谢各位老师观看、点赞、关注、评论哦!
34250车间小电工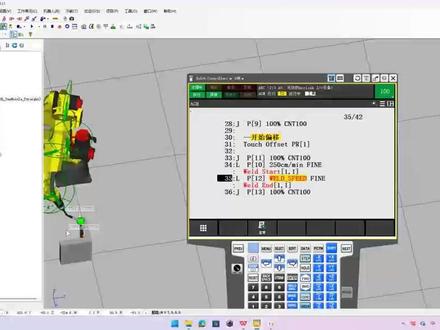 03:35查看AI文稿AI文稿
03:35查看AI文稿AI文稿大家好,今天我们来学习发那颗触碰感应,首先我们来看一下知识点,最后通过仿真软件实现功能。触碰感应,也就是我们所说的寻位功能。当我们弓箭每次上箭后都会发生偏移,导致汉凤偏了,这时我们就需要通过寻位找到弓箭的偏移量,从而使轨迹也跟着偏移。 我们来看一下所需要的设置,先按下菜单键选择设置,选择接触感应 i o, 将接触感应的输入输出信号填好,这个信号根据现场规范来填。再设置碰触感应器的坐标系,也就是寻位的方向。选择坐标信号,需要用己就填己,需要用到多个就依次往下排就行。 通常机器人组和参考组的编号不用更改。设置好原点及你想要的 x、 y 的 寻觅方向,注意操作完成后一定要点完成。探索模式有四种,一般用的最多的就是脚汗缝模式,探索类型如图,可以暂停仔细观看。一 d、 二 d、 三 d 是 攻陷在 x、 y、 z 单个或多个方向的平移所用到的寻觅类型。 当弓箭方向发生了旋转后,就需要用到后面这三种寻觅类型,这是我们要知道的寻觅必要的四个指令,一个探索开始指令,需要,一个探索结束指令。为了执行新的探索动作,希望再度执行探索开始指令的情况下,必须用探索结束指令结束以前的探索动作。我们来看一下具体操作菜单。设置接触感应器 i o, 设置好对应的输入输出,同样的坐标系设置为一,其他不变,然后进行原点 x 正方向, y 正方向。设置移动机器人后,记录好对应的点位, 我这里是建好了的,不过多演示。按下 data 数据类型,找到碰触传感器设置,选择没有用过的点,详细进入设置第一个基准,当我们是第一次寻位,基准要改成 on, 寻完第一次要置为 off。 探索速度,寻位时的移动速度。探索距离,寻位的最大距离超过设定值就会报警。根据现场弓箭会偏移的距离设置 坐标系,填刚刚我们设置的坐标系号。探索模式,这里演示脚焊缝的探索类型,弓箭仅发生平移。选择三 d 自动返回,开启返回速度,按需求设置返回距离,看空间大小设置,主要设置就是这些,其他设置就不一一介绍了。这里我们试用焊丝寻位,设置成焊丝。 现在看一下我们建好的程序,在程序里点指令,找到碰触传感器,这里面就是我们寻位用到的指令,可以看到有四个指令,开始搜素和结束。搜索是寻位的指令,碰触偏移和偏移结束就是通过寻位得出弓箭偏移量,对轨迹进行偏移的指令。寻位号用刚刚设置了的一号寻位出的偏移量寄存到 p 二一里,我们简单看一下程序 结束寻位,然后开始偏移,用寻位寄存了值的 p 二一结束偏移,注意回去的点或者空走点,不要带偏移。来看一下最终效果。 寻位完成,把基准改为 off 移动弓箭,看还能不能找到轨迹, 这里只做了 x y 的 移动,其实用二 d 类型就够了, 可以看到已经找到了轨迹。 来看一下最开始我们设的点位位置在哪里? 来看一下通过寻位后的点位位置,弓箭发生偏移后,这就通过寻位找到 l 原来的位置。今天讲解就结束了,感兴趣的小伙伴可以尝试更复杂的情况。









猜你喜欢
最新视频
- 3556AI智库