发那科机器人home程序上有吗

粉丝3.4万获赞8.8万
相关视频
 00:32查看AI文稿AI文稿
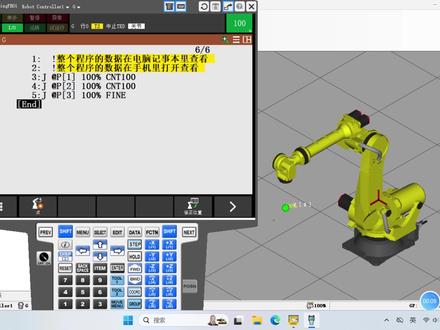
00:32查看AI文稿AI文稿百分之九十的人不知道法纳科机器人程序,不装仿真软件也能用记事本打开程序,还能在手机上查看,怎么做的呢?把 u 盘插在适焦器上,我们点击 menu 选文件 工具,这里我们切换设备至 u t e, 然后点击备份,选择 i s k 程序,确定 点,所有搞定了。你把 u 盘上的东西放在电脑上,用机设本或者放到手机上都能打开,非常的方便。
333工业机器人教程 01:24查看AI文稿AI文稿
01:24查看AI文稿AI文稿发纳科机器人系统集成 g i g o 组,信号配置是必须掌握的核心技能,今天一次性讲透,看完直接上手。首先我们点开 menu 菜单,选择五 i o, 再选择组。 这里我已经提前配置好了两组 g o 信号,我们就以 g o 为例, g o 的 配置方法和 g o 完全一致, 重点讲分配逻辑。前面的机架插槽我上两期视频已经详细讲过,这里不再重复了。 今天核心讲开始点和点数到底是什么意思?我这里设置的开始点是二十一点数八,意思就是从定义 i o 的 第二十一个信号开始,占用后面连续八位,也就是二十一到二十八。 现在这八个信号为一个整体。第二组开始点二十九,点数十六,就是从第二十九个信号开始,占用后面连续十六位,这十六个信号为一个整体。 注意组信号点数最大,支持十六位。我们看实际效果,第一组 g o 是 八位,最大组合值是两百五十五, 我模拟输出一个两百五十五,右边可以看到前八个 d o 全部更了。第二组 g o 是 十六位,最大组合值是六万五千五百三十五, 对应的十六个信号也全部导通。 gi 一 般用于机器人接收 plc 传来的程序号、速度值、工位数据等组合量。 gi 则是机器人反馈给 plc 的 程序号、工位号、故障码、状态码等数据。
877工业机器人教程 03:36查看AI文稿AI文稿
03:36查看AI文稿AI文稿方纳克机器人手动操作啊,首先我们把那个电柜上这个转到手动, 然后把这个撕胶器上这个旋钮,然后转到 o n, 对, 转到手动,转完之后我们按着后面那个使能键,要轻轻按住啊,不要使劲,这样使劲按进去也不行,使劲按会报警,这样轻轻按住就行了, 按住死能键,不要松手,一一直不要松手,然后按这个 r、 e、 s, e, t, 按这个复位键 之后这里有报警会消除,那我再松开,再按一下啊,先按住死能键,然后看上面有报警啊,再按消消除键,复位键,然后再按这个 shift, 这个也要按住,不要松手,不要动,然后再动,再调这边的 x y z 就可以动机器人了。咱们一般用的话就是 z, z 家就是机器人,我压包的话就往上升,哎, z, z 家往机器往上升就行了。 还有一个咱们动之前要看一下这个坐标系是不是全区坐标系,如果不是全区,如果是关节的话,就按这个 c c o, r d, 按这个坐标系切换到一呀全区 全局的话就上下左右 x y z 移动的啊,这个就是全局运动,然后按着使能复位,按着 shift, 这两个不要松手,然后按 z 加啊,这样手动就可以了。 我们发大哥就是如果想自动运行的话,首先我们要摁这个 d a t a, 摁到数据键,数据键,然后进入我们那个参数调整界面, 首先第一个,第一个是长宽高乘数,马路乘数,还有座型,根据我们说明书产品实际需要,然后按实际的设,设的话就直接直接选到这一行,然后直接输数字就行,幺二零零,比如一米二的啊,输完之后按回车, 如果输错了话就,然后就重新输一下,输完型号之后,输完型号之后我们按那个 f、 c、 t、 n, 然后选到了结束程序,按回车, 结束程序之后,我们选择我们需要运行的程序,点那个程序列表,然后选到我们需要运行的程序,然后这里是锐浩,然后我们点确认 这里,点完之后,然后这里有个旋钮是要去我们转到 off, 转到自动,然后电柜上那个同样转到自动。转完之后,然后我们按复位点 复位,按好了按启动,现在机器人已经在在自动运行了, 全部绿色的就说明它自动运行,然后这个这个是暂停键啊,如果是我们要切换型号,切换型号,更换产品规则,那我首先我们要暂停, 然后同样呢摁到 d、 a、 t、 a, 然后输入我们的新的产品型号,输完之后,然后我们按按那个 f、 c、 t、 n, 然后程序结束, 然后再选择程序,选择我们要运行的程序,按确认,按完之后,然后我们直接按启动,这个程序会重新开始运行。
 00:58查看AI文稿AI文稿
00:58查看AI文稿AI文稿一分钟学会法纳科 u i u o 信号与机架叉槽配置。首先打开 m e n u, 选择 i o, 选择 u o u, i 是 机器人系统输入信号,外部给机器人发指令、启动、暂停、四伏开启、复位即停、程序选择等。每个信号的定义我放在左边慢慢看。 u o 是 机器人系统输出信号给外部反馈状态就绪、四伏已开、运行中、暂停、报警、程序完成、模式状态等。具体的定义我放在左边可以慢慢观看。 这里的机架号代表模块或者接口的类型,不同类型不一样的机架号以及对应设置的叉槽,我也用图片的形式放在左边。 最后改动后的状态会变成待激活重启就可以了。下一期讲述自 i o 和组信号的配置。
550工业机器人教程 01:02查看AI文稿AI文稿
01:02查看AI文稿AI文稿我们讲解一下法纳科的编程,首先我们来创建一个新程序,来选择 a 二二二确认一下,然后把我们的主页码这个改成信号,好,结束来,我们现在第一个点, 按进 f 一 勾确认一下,然后再去我们的焊接点,我们把机器人走过去, 然后再定一个勾,把光标移到这个的后面,然后按 f 四选择一个焊接,开始引弧,一杠一,输入我们的工艺号,然后把机人往这边走,选择我们需要焊的焊缝, 然后给一个 l, 好, 把光标移到他后面,给到一个焊接结束,再给到我们焊接结束的工艺号 好,把机器人抬走,再定一个点,定安全点,好,这是就是我们的简单的焊接程序,我们再走一下。
53轩烨机器人 00:44查看AI文稿AI文稿
00:44查看AI文稿AI文稿叫地主,哎,巴纳科,我为什么找不到圆弧指令啊?来我来教你一下。首先呢我们还是来看一下射焦器啊,然后我们找到 f 一, f 一 要对应的是这个点,如果说是这个指令的话,我们要选择 next 翻译,找到这个点的位置,然后我们点击 f 一, 进到这个里面有四个标准动作,默认的情况下是 j 带一个 find, 或者说 j 带一个转换器 c t 版,然后 l 它是没有 c 或者说 a 的 它这时候我们怎么办呢?我们点击 f 一标准,这时候呢我们就可以去选择,比如说我们把 air 这条命令选成一个圆弧,把它点到圆弧点击确定,这个时候呢,我们在按 f 一 的时候就有对应的圆弧指令了,学会了没有?这就是我们刚才讲的如何在发那颗快速指令一栏里面添加我们想要的快捷动作,来方便我们的后续的编程操作,大家学会了没有?
401机器人—小地主 03:05查看AI文稿AI文稿
03:05查看AI文稿AI文稿发纳科机器人 p n s 远程程序启动到底怎么设置? plc 又是怎么调用的?手把手教大家在发纳科机器人仿真软件 robogad 里,用 plc 通过 ui 信号调用 p n s 程序的全流程。 首先先搞懂一个关键概念, p n s 全称是 program number select, 也就是程序号码选择功能。它的核心作用是让 plc 通过 ui 信号远程指定机器人运行哪个程序,最多支持两百五十五个程序。 简单说, p n s 就是 机器人的远程点名系统, plc 发编号机器人暗号,执行双向确认更安全。接下来第一步,先建 p n s 程序命名有严格规则,必须记牢。 程序名要七位格式是 p n s 加四位数字。比如基数设零,要调用一号程序,就建 p n s 零零零一 基数,设一百就是 p n s 零一零一基数,加上程序编号。在 robogad 里新建 tp 程序,直接按这个规则命名,不然 plc 调用会失败,这是基础中的基础,千万别错。建完程序,重点来了, 在 robogad 里做三个关键设置,跟着录屏一步步来。第一,先设置程序选择模式,打开仿真机器人的试教器,按 menu 六设置, 点击程序选择,把程序选择模式设为 p n s, 按 f 四确认,然后重启仿真控制器,这个设置才会生效。 第二,再设 p n s 详细参数,回到选择程序点详细,这里有两个关键项,基数设零或一百,根据程序编号来 确认信号脉冲宽度默认四百米秒就行,不用改。第三,系统配置必设,按 menu next 系统选择配置,找到两个关键参数,专用外部信号设为启用远程,本地设置设为远程 设置搞定。现在看 plc 怎么通过 ui 调用 pns 程序调用靠的是两组信号。记好第一个输入信号, ui 九到 ui 一 六对应 pns 一 到 pns 八二禁制编码。比如要调用 pns 零零零一,就把 ui 九设为 o n 对 应二禁制零零零零零零幺,然后给 ui 幺七选通信号,发一个三十米秒以上的脉冲,告诉机器人编号选好了。 第二个是输出确认信号,机器人收到脉冲后,会通过 sno 一 到 sno 八回传编号,还有 snack 确认信号。 plc 要核对这两个信号确认选对程序,最后给 ui 一 八启动信号发下降延,机器人就会运行刚才选的 pns 程序了。 最后再总结一遍核心步骤见 pns 规范程序试教器。设 pns 模式加基数, 系统配置启动。外部信号加远程 plc 通过 ui 九到 ui 一 六发编号, ui 一 七发选通, ui 一 八发启动,全程双向确认,安全又稳定。可以看目前我这样设置是已经可以调用起来 pin s 零零零一的程序了,已经在运行中了。
744工业机器人教程 00:34查看AI文稿AI文稿
00:34查看AI文稿AI文稿作为一名工程师,我将用未来一坤年带你零基础学习机器人。今天我们学法纳科机器人外部轴程序创建点 select 点创建,然后我们把程序明设为外部轴,按 enter 点详细这里可以改注视为外部轴。然后我们看主演码, 这里第一个一代表的是机器人本体,我们要控制外部轴的话,在第二个信号这里把它改为一。第二个一代表外部轴,然后结束可以看一下程序目录,这里有没有建立成功,可以看到这里已经成功了,你学会了吗?
463工业机器人教程 00:40查看AI文稿AI文稿
00:40查看AI文稿AI文稿现场机器人程序不敢动,把那颗全备份导入仿真,零风险调试,看完直接会首先打开仿真软 robo guide 新建工作单元,点击下一步,这里建立你想要的名称,这里选从备份创建,选择你之前备份好的文件。备份怎么来的,可以去看上一期, 打开,然后点下一步,直接点完成。生成虚拟机器人仿真器的时候需要等一会儿, 打开这里的试教器图标,你会发现现场机器人里的所有东西都在这里呈现了。你在这里可以随意调试测试,不用怕撞击,零风险练习。
346工业机器人教程 02:08查看AI文稿AI文稿
02:08查看AI文稿AI文稿一名十年经验的机器人工程师,我将用未来一年的时间带你上手入门各种机器人。话不多说,开始吧!今天我们学发那颗机器人试教器按钮功能首先我们看这个 press 返回键任何界面下返回上一级界面。 shift 功能组合键配合其他按键使用,比如这样命令菜单键,按下后调出系统主菜单。 select 程序目录键,按下后显示所有程序。 e d i t 按下后直接进入当前正在编辑的程序界面。 data 用于查看和修改数据,如数值寄存器和位置寄存器。 f c t n 功能键提供一些额外的快捷功能,例如重启 next, 切换到界面的下一页按键。 d i s p。 多屏切换配合 shift 使用。 方向键用于光标上下左右移动。 s t e p 单步运行和连续运行的切换键。 h o l d 暂停键,暂停正在运行的程序。 reset 复位,消除报警。 basic space 删除键,在输入文本或数字时,删除光标前的字 item 可直接跳转到输入的目录。横竖 enter 确认键确认当前操作。 f w d。 向前运行键,在单步模式下,程序向前执行一行。在连续模式下,程序运行。 b w d。 向后运行键, 在单步模式下,程序向后执行一行。 c o r d 坐标系切换键,切换其他坐标系。 group, 可切换至导轨控制或其他第七轴加速度调节键,增加和减小机器人的速度。 d i a g help 查看系统状态,错误,日制和报警信息。 posen 快 捷显示当前机器人各轴的位置坐标。 i o 快 捷查看机器人的输入输出信号。记住了吗?下一期我们学外部疾停和安全门的接线方法,下期见。
2145工业机器人教程 00:51查看AI文稿AI文稿
00:51查看AI文稿AI文稿还在怕发那颗机器人丢零点吗?不用怕,一段小程序直接搞定。这是发那颗机器人系统变量里的零点数据,如何自动备份到寄存器里? 很简单,一个小程序直接搞定。首先我们要新建一个程序,这是我刚刚新建好的,前面五个轴我已经写好了,我单独再写一下六轴的点击指令,选其他,选第七个,选第二个,选 r 数值寄存器。然后就像我这样手动打上去, 然后把我们创建的这个程序直接在后台里运行, 当 d i 三零信号触发以后,实时的零点数据就自动备份到数值寄存器里去了。赶紧去试试吧。
635工业机器人教程 00:36查看AI文稿AI文稿
00:36查看AI文稿AI文稿程序丢了哭没用,学会法那颗全备份才是王道,还能在仿真 robot guide 上打开哦。首先把 u 盘插在视胶器上,点菜单,选文件工具,这里我们选择切换设备,选择 t p 上的 usb。 然后我们回到 u t e 的 子路径,创建一个备份名称,这里我们写,随便写一个 a a 按确定选 f。 四备份选以上所有,这里选否这里选是这样就备份好了。这个备份还可以放在电脑的仿真软件上打开。下期教你如何把这个备份在 roboget 中打开。
397工业机器人教程






