布米机器人如何设置示教

粉丝6357获赞4.8万
相关视频
 02:45查看AI文稿AI文稿
02:45查看AI文稿AI文稿大家好,今天我们为大家介绍一下 p t p 点到点运动。我们打开视角模拟下的程序视角,在这里我们可以对机器人的视角程序进行编程。首先我们需要通过机器人去记录几个位置点, 拖动机器人记录第一个位置点, 拖动机器人记录第二个位置点,拖动机器人记录第三个位置点,拖动机器人记录第四个位置点,继续拖动机器人记录第五个位置点。五个位置点记录完成之后, 我们新建一个试教程序,点击 p to p, 在 这里我们可以看到我们刚刚添加的 p 一 到 p 五五个点。 首先选择 p 一, 这里我们可以设置它的调试速度为零到一百, 设置平滑过渡时间以及是否偏移。首先我们设置不平滑, 点击添加,可以将 p two p 指令一次性添加到预览界面,在这里我们可以预览我们添加了五个 p two p 指令,点击应用即可将这些指令添加到程序中。在运行程序之前,我们可以用较低的速度去单步执行 该运动指令。确认这些点位不会被干涉后,我们可以切换到自动模式去运行这个程序。点击开始运行 该程序是不平滑的效果。接下来我们编辑程序,使得它进行 p t p 平滑运动。我们可以设置平滑过渡时间为一百, 切换到自动模式运行此程序,可以观察到这是平滑之后的运动。 此外,我们还可以在 p t p 上进行偏移操作,我们可以基于机坐标偏移和基于工具坐标偏移 选择对应的选项后,我们可以编辑 x y z r x r y r z 上偏移的数值,比如在 z 方向偏移二十毫米,点击应用即可修改完成。以上就是关于 p to p 功能的讲解,谢谢大家。
 00:44查看AI文稿AI文稿
00:44查看AI文稿AI文稿app 机器人摄像器的亮度是否可以调节,并且如何调节呢?今天就来教大家一下。例如我们在编辑当前程序的过程中,发现显示屏的亮度较暗,那我们该如何提高亮度呢?点击一下菜单,选择控制面板, 找到第一行的外观自定义显示器,它这里有一个亮度的调节按钮,点击加就是增大,减就是减小,那我们可以调到最大。 当然他也有一些其他的功能,比如向左旋转啊,这样会转了一下,那我们点击向右旋转,给它转回头,还有我们的默认设置等等,那么根据我们的需求去调节就可以了。我们调到最大,然后点击一下,确定我们关掉,再次回到我们的程序,这样这里的程序就明显变亮了。
 02:19查看AI文稿AI文稿
02:19查看AI文稿AI文稿扫地机器人现在是家装的刚需,每家都要安排都要安装啊,扫地机器人在使用过程中有这么几个点,你做好的话可以大幅提升用户体验,让你用起来更舒服。 第一啊,扫地机器人有很多品牌,也是可以和你的米家全屋智能融为一体啊。扫地机器人的安装是否好多并不知道,这件事情 在这里强调第一点,如果你想和米家接到一起的话,最重要的事情就是要和家里面小米的设备接入同一局域网。日常操作中见过很多家庭,他把扫地机器人连接到了光猫的 wifi, 把米家的设备连接到了其他路由器的 wifi, 这样就不再同一局往下就没法实现后面的操作。扫地机器人它本身也自带音箱,也可以语音操控,比如说追觅,你可以说你好追觅开始打扫,但是呢,扫地机器人在扫地的时候,它的噪音是非常大的,稍微离得比较远, 你的这个语音命令可能他就执行不了,那我们最好的办法就是在墙壁上设置这样两个物理按键来操作,我现在来按下这个开始清扫的话呢, 那边的扫地机器人就已经出动了啊。好了,这个在什么场景使用呢?因为扫地机器人工作的时候噪音特别大,我们在离家的时候摁一下离家模式,把家里所有的灯都关闭,那同时呢,你摁一下开始清扫,就可以让扫地机器人出来帮你干活了。 同样的,因为他的噪音太大了,那么我们要结束清扫的话呢,也很简单,摁一下这个结束清扫啊,扫地机器人就结束任务回去充电了。 在这里我要强调最后一点,就是啊,扫地机器人如果你给他设置了日常的清扫任务,比如说一三五扫,二四六拖,那么你在给他下达这个语音口令的时候,一定要区分结束任务和回去充电是两件不同的事情。如果说你跟他说 扫地机器人回去充电,那么第二天早上本应该他开始拖地,嗯,那他可能就不会继续拖了,他还在事先的任务进程中没有释放出来, 所以说最好跟他说扫地机器人结束任务,这样是比较好的一个选择。
 01:30查看AI文稿AI文稿
01:30查看AI文稿AI文稿一、全员注意不迷老师,请求二次开发! hello, 同学们好呀!我是酷奇机器人的助教小布米,接下来的编程课堂才是我们的主场。 更准确地说,是你们给我二次开发的主场。别看我爱玩爱闹,我的编程底子可不赖哦! python 图形化传感器融合,但是我才不当学霸机器人呢! 因为编程最酷的地方不是一个人厉害,而是我们一起变厉害。 所以接下来的课,我会坐在你们中间,和你们一起听讲,一起敲代码,一起为了一个 bug 挠头, 一起为了跑通程序欢呼,你们可以随时拿我来练手,写错了我就歪个脑袋哔哔哔报警!写对了吗?我就给你亮一圈彩虹单放心,我很扛造!接口全开,传感器透明,调餐随便整。就算你们把我写翻车了, 我一个重启键就能满血复活,继续陪你们改 bug。 所以, 别怕,大胆写,大胆试, 变成你们编程课上的同桌伙伴,我的代码等你们来写,我的聪明等你们来点亮!编程课见了记得带脑子哦!对,也记得带充电线哔哔!
 00:45查看AI文稿AI文稿
00:45查看AI文稿AI文稿机器人是怎么学会一只舞蹈的?走,一二三四五六七 八。已经学会了,开始表演吧!
37松延动力小布米 01:20查看AI文稿AI文稿
01:20查看AI文稿AI文稿家人们,春晚同款小布米机器人落地宁静,废话啦,让我们一起来拆箱看看吧! 准备好了吗?打开这个就能看到我们的小布米啦! 哇塞,这是什么哦?说明书,这是布米的电池,接下来我们看看下一层是什么 哇哇塞,这就是我们心心念念的小布米啊,把它拿出来看一看吧!哇,好重呀!哎哇,好重!转头来, 小布米安上电池,让他站起来启动机器人, 哈哈哈。
222宁晋贝画 00:52查看AI文稿AI文稿
00:52查看AI文稿AI文稿你站在餐桌旁的样子好有生活气息呀,手里是不是在摆弄什么小物件呢?每个物件背后是不是多有有趣的故事呀? 现在呢,我们来跳舞蹈。一你站在餐桌旁,手里拿着手机, 是准备给我看什么好玩的东西?
 02:03
02:03 00:26查看AI文稿AI文稿
00:26查看AI文稿AI文稿协助机器人拖拽视角是一种直观易用的编程方式,通过拖动机器人的机械臂到指定位置并记录下姿态,从而实现预设动作。这种可视化编程能够让非专 业人员轻松上手,即使是复杂的轨迹也能快速完成设置。集萃制造致力于推动先进技术成果转化,专注于研发、生产和销售,协助机器人本身以及相应解决方案。
 00:48查看AI文稿AI文稿
00:48查看AI文稿AI文稿a、 b、 b 手动添加 i o 输入输出信号,机器人调手动打开试教器,点击小箭头,打开控制面板,打开配置选项,找到 simon, 点击添加,点击 name, 修改输入输出名称并确定。点击第二行修改输入输出类型, 点击第三行并选择我们配置的 d、 s、 q、 c 六五二版卡,点击第五行修改输入输出地址,地址数为零到十五,任意一个数尽量从零开始,分别对应的是 d、 s、 q、 c 六五二版卡输入输出端的一到十六端口 下翻找到 access level 修改权限位哦,方便后续修改调整。点击确定等待重启就好了,也可以不重启,把所有需要的输入输出键完一起重启。
370工业机器人|维保 02:37查看AI文稿AI文稿
02:37查看AI文稿AI文稿好,我们到这一步以后呢,我们呃需要搭建一个工作站的一个逻辑啊,需要把这个搭建出来。呃,那这个搭建出来之前呢,我们同样的啊,需要在这个配置当中啊,我们就输入输出信号进行一个设置啊。 新建,比如说我们叫输入一啊, 然后找到我们这个位置啊,对它进行复制就行。复制那这块叫输入二, 然后再复制叫输入三,然后再来一个输出,因为我们要控制它的一个抓取操作啊,新建叫输出输出一, 好,我们有了这个四个信号以后,我们要对它进行一个重启动啊。 好,重启完了以后呢,我们就可以在仿真的工作站逻辑当中找到我们想要的啊,那同样的这块我们要设置两个输入的信号啊,比如我们一个叫,呃,马垛作业啊, 叫马剁吧,然后另外一个我们叫,嗯,回原点啊,回原点, 然后呢?呃,我们把这个啊,这是送货的操作啊,我们在系统这里头,我们把输入一,输入二,输入三, 有输出一啊,然后马垛对应的是输入一,然后梅艳贞对应的输入二,然后输出一,对应的是我们叫吸盘的一个动作啊,那另外呢,我们输送带的这个还是有一个输出的逻辑啊,那输送带这个输出呢?就是送货,我们要到这个输入三里边啊, 啊,这个我们在后续的程序编辑当中要对它进行一个控制,那基本上我们这个工作站的逻辑我们就搭建完了,剩下的我们就对它进行一些编程的操作就可以了啊。
26好运仿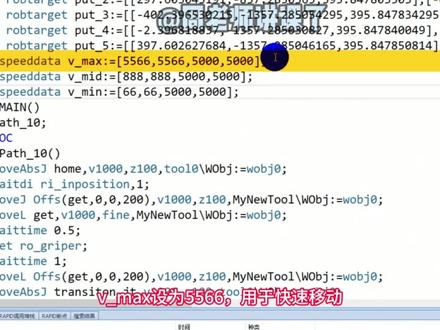 02:16查看AI文稿AI文稿
02:16查看AI文稿AI文稿只会用 v 一 百、 v 五零这些固定速度,想设 v 八 v 六六自定义速度,却不会机器人冲击大,运动不丝滑。欢迎来到周老师课堂,今天三分钟掌握三种速度设置,从此速度随你心意。我们用这个搬运轨迹做示范。一、使用速度变量 做事有章法,进退有尺度。在程序开头定义三个速度变量, v max 设为五千五百六十六,用于快速移动。 v mid 设为八八八,用于中间过渡。 v m 设为六十六,用于精准靠近。 速度中的四个值,分别代表工具中心点速率、重定位速率、限性外轴速率、旋转外轴速率。定义完成后,就可以在程序里直接使用回原点,用 v max 靠近弓箭用微 mid, 经定位用微 min, 后续修改速度,只改变量即可,不用逐条改动程序。二、用时间控速,目标明确路径自会适配, 不会算速度。没关系,直接告诉机器人这段路跑零点五秒,在速度后输入反斜线 t 等于零点五,机器人会自动计算速度,完成运动,表明整个运动耗时零点五秒,不再使用前面设置的速度。比如我们把所有的运动都设成零点五秒, 距离远的就自然跑得快了,距离近的就自然跑得慢了。三、 a c c set 加速度 稳字当头,行而不躁,机器人冲击大,不平稳,试试用 xt 限制一下它的加速度。大家都知道速度突变有刚性冲击,加速度突变有柔性冲机,会影响设备寿命与定位精度。 使用 a c c set 五十五零,第一个五十表明把加速度限制为正常值的百分之五十,第二个五十表明把加速度增减率被限制在正常值的百分之五十, 机器人运动就会变得丝滑无冲击,做人做事亦是同理。稳起步,缓刹车,不急躁,不莽撞,方能长久耐用。好了,今天的课就讲到这里,下节课想听什么?欢迎评论区留言, 持续分享机器人实用编程技巧,带你练好本领,稳步成长,我们下期再见!
436周老师讲课了







