汇智控制器如何编程斜度
下面我讲解一下会制编程的那个啊,斜顶编程, 斜顶编程呢,就是说一般呢,就是说有几个方法啊,我们会制里面呢,一个是有那个就是用异形的编程方法啊,上下两个图的,还有一个是直接用一个图就可以生成那个斜顶程序的, 上下异形两个图编程呢,是一个比较通用的办法。我先讲解一下就是两个图的编程啊, 斜点呢,一般两个图形呢,画的时候可能叠在一起的啊,这个会对编程编程是没有问题的啊,就是说上下选择的时候可能两个图重叠,比较难选择。那我们绘制编程里面呢, 他是可以两张图,上下两个图我可以分开画的,不需要画在一起。那比方这个图白色的是那个顶面啊,红色的是底面,那怎么区分呢?我可以把那个,把这个,呃,这个这个边上这个红色那个图,我把它移开来啊, 我用一个固立的办法把那个红色线啊,单独画一个图,两个图了,上下底面图分开来了啊,然后把这个图形 提交到灰色是编成啊,那这个时候就是说白色是顶面,红色是底面,那编成的时候相互之间就不干扰了,对不对?假如说我现在啊编那个 编那个底面图形啊,底面图形啊,这里选择单选自动,因为我已经画好了嘛,啊,一个图形点一次啊,顶面完成了,然后我编底面, 这样上下两个图啊,这轨迹就编好了啊,那就代码存盘啊,就完成了啊,这个是 在绘制界面里演示的,其他的利用绘制编程的这个像这个软件啊,都是一样的编程方法, 下面我再讲解一下用锥度编程一张图的方法,也可以生成斜顶的绘制编程里面啊,有那个 锥度编程里面有斜点编程啊,来看一下啊。啊,这一张图一张图,然后编程的时候呢,这里写的锥度啊,这个这个锥度呢,设定为斜顶的,你那个斜度是多少啊?这个 是啊,顶面图纸尺寸还是底面图纸尺寸啊?这个是这个就表示你这个图形是顶面图形还是底面图形啊?还有这个斜顶 啊,鞋顶这个有两种,一种是单边写的,一种是一种是就双边写的。那我这不写这个不选中,就是就是双边写的,我们看看这个编出来是什么什么样子。一个图形啊, 好,我这里选择那个,用那个框选自动啊。 啊,好,全部编好了,你看看啊,这个他就是说这个鞋顶他就会 这个图形,它就会沿着那个这条引线的方向啊,是左斜还是右斜?这个这个用户自己摸索一下就可以了啊,这个是一个快速变斜点变成的方法啊,这里我再说一下那个啊,还有一个是单边斜啊,我把轨迹删除掉, 刚才那个鞋垫编成里面还有一个鞋垫,还有一个单边写的啊,单边写的意思就是一边是折的,一边是斜的,那于眼线这边呢?他就是直的,另一面就是斜的啊,那我编出来啊,什么样子看一下啊? 那这个编错了,就是这个鞋垫,就这边是直边,这一边是斜边, 那这个鞋垫那就是也是快速的编好了啊,那么假如说是呃喜欢呃一张图编成的,那就可以用这种方法好来完成这个鞋垫编成。 还有就是那个假如说两张图叠在一起画的,用户一定要在一起编成,那也是可以做的啊,那假如说这两个图是叠在一起的 啊,那我这个用异形的编程方法啊, 这里是异形顶面啊,异形顶面,然后我就要选择这个假如说这个轮廓,你那个,呃眼线画好了,对吧?我点白色图形它就变好了,点白色图形就变好了,你看 啊,然后我选择异形底面,我点那个红色图形 啊,红色红色也变好了,这样就代码串盘就可以了。那有有的时候,假如说你这个线 啊,那个上下的线是共用一条线的,共用一条线的话,假如说这个图形重叠的时候呢,这个图形是用一条线的,那你编第二个图形选择不了的时候,你可以按住 ctrl 键, 按住 ctrl 键再去选这个图形就可以选择了,所以重叠起来编呢,就是说相对来说选择的时候稍微麻烦一点,但是也是可以编的,那最好是可以,你要用异形编程的,可以分开两张图画,那是最快的。

粉丝1865获赞1836
相关视频
 00:23查看AI文稿AI文稿
00:23查看AI文稿AI文稿应粉丝的要求呢,帮他做一台摆动电机啊,要求接线简单,所以这个电机呢,它是集成控制器、驱动器为一体的电机。这边那个旋钮呢,可以调节它的速度啊, 然后呢这边两个按钮是可以调节它的摆动角度,那么这个电机呢,是带减速机的,所以它的力气还是比较大的。
221领航智控编程 00:35查看AI文稿AI文稿
00:35查看AI文稿AI文稿编程使用磨损生成出来的程序就会产生 g 四一或者 g 四二刀具半径补偿时,我们找到看 g 四一或者 g 四二 d 的 数字是多少号。我们到机床的控制器里找到刀片,然后看一下,这个是磨损补偿,形状 d 是 磨损补偿, 形状 h 就是 通常用刀的刀具长度补偿。假如加工长方形为一百乘以五十的,那么形状 d 如果是负给负一的话,那么最终加工出来的外形尺寸是九十八乘以四十八的外形,这就是刀具半径补偿。
69CNC前线技术🩷 01:01查看AI文稿AI文稿
01:01查看AI文稿AI文稿今天我们来说说 colossus 的 cnc 功能,首先我们要将我们选择好的图片或者是文字通过第三方软件转换成 g 代码 或者是 d 叉 f 文件,但是它要在这个 colossus 程序当中进行一个呃 g 代码的一个转换。 第二就是我们要把这个基代码传输到我们的运动控制器的对应文件夹当中。随后呢我们需要对这个 colossus 进行编程,那 colossus 呢?将不同的功能分成不同的模块,像这个文件读取模块、解析模块以及一些功能模块,像这个 呃圆弧模块、平滑模块、速度限制模块大小,收放模块等等,你使用到不同的模块就对不同模块进行调用。 随后呢他就是一个嗯鸡蛋码的一个插补解析模块,解析完成之后呢,他就会把鸡蛋码转换成对应的轴的一个动作,进行对轴进行一个控制。有学习交流或者是项目咨询老板可以关注我。
29一米八的工程师 01:14查看AI文稿AI文稿
01:14查看AI文稿AI文稿红润 p r 二零简易 plc 控制器的编程操作,确定这边有开关位选择,可以选择长闭点或长开点。 i 零表示信号输入的第一个端口,也可以选择 q 零输出的第一个端口,这边是判断, 选择一个开关位后,按 l t 开始划线, 您可以直接划到输出,选择一个输出。我现在输出的是 q 零,就当 i 零闭合时, q 零闭合,当 i 零断开时, q 零断开。也可以给它选择置位或者复位,置位就是保持, 复位,就是给它解除保持输出。我可以选择 q, 也可以是 t 或者 c, t 是 计时器, c 是 计数器, 这边选择零,一二三四都可以,零表示第一个输出,按照这种模式,根据逻辑图继续往下编就可以了。
24顺昌虹润公司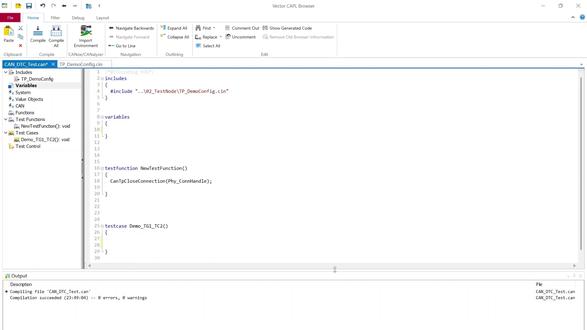 03:24查看AI文稿AI文稿
03:24查看AI文稿AI文稿嗯,在开播中,我们是如何通过开播向我们的控制器发送数据呃内容的嘞? 同时我们的 q 一 软件里面的窗口也能监测到,比如说我的幺二三号,这是七二四,对吧?它的内容,对吧?我是如何去通过这种去实现的, 对吧?那么我们先讲第一种,第一种的话就是通过 autopilot 发出去,就说 autopilot 它发的是一个 message 类型,那么 message 类型的话我们也要在,嗯,可以在局部,也可以在全局面定一个 message, 定义 message, 那 么呃,名字我认命为胜的一大把,随便写一个。呃,那么我这个定义了个 message, 那 message 的 话,我这面内容没有定义,那么到这个啊,擦面儿 这个 case 里面呢?呃,管理的这个里面来写,呃,这里面的话为定义这个 mac 的 id 等于一个零差一二三,对吧?那么我的这个要同时要定义它 d r c, d r c 等, d r c, 嗯, 等于八,嗯,我可以把它每一位赋给它赋值, 那么负值的话,我要定义一个参数进行累加,定一个局部的 n n 的 话,比如除以是等于零,那么 n 小 于八八的话,是 d l c 嘛,对吧?它 d l c 里传到八个数据,那么我们就能发 n。 佳佳,那么到这里面来,我去给他做磊做做便利,对吧?便利就是我这个,呃,麦氏机的,麦氏机的 bet 等于零差零二,每位都为零差零二,那么这里面的话做便利,那么这里面的是 n, 对 吧?做循环嘛。最后的话,我要通过 auto push 发出去 啊这个函数,这个函数的话只它只能发 m c g 类型,然后我定义这个 m c g 的 话,快发出去,那么这是啊,第一种方式, 第一种方式,那我们看一下这个发的内容, 嘣一下子就发出来,对吧?每一位啊,因为我这里选的是立即 立即执行,所以说他就会点击,他就会马上仔细的报文 id 幺二三,那么他的,嗯,他是要看报文,他会提叉八,第二次为八,那么 它的数据每一个 byte 都是零二,因为我这里面便利了之后让它都等于零二嘛,这就是通过啊, output 发 message 类型。
19懂点车载测试 01:01查看AI文稿AI文稿
01:01查看AI文稿AI文稿下了班,没事练练手,做个简易红绿灯程序,看需要弄哪些。首先用 ps 或者一个你喜欢的背景位图,再画几个不同颜色都状态为指示灯图,找一个没用的触摸屏,把这些位图搞里头。 丁一好为状态地址。在扒拉一个八十二年的 plc, 编一好梯形图,把程序搞里头。这里 pc 和 plc 用 r s 四二二通讯,触摸屏和 plc 用 r s 二三二通讯。这里梯形图用的启停交替熟出指令,沿区间复位指令、 c 技术指令和比较运算指令,配合 m 八零幺三闪烁指示,这里时间累计误差很小,随意启停转灯都是同步的。看看效果吧,可以测试一下 led 实物和触屏显示。
12维修机床-赵永庆 00:29查看AI文稿AI文稿
00:29查看AI文稿AI文稿有客户让我们做一套摆动电机,他的钥匙是需要可以控制角度,对速度的要求不高,但是扭矩要大,我这里直接给他做出来了。 我用了一台十二点五牛米的八十六步进电机,一台八六驱动器,六十微的变压器,以及一个 h f 零二零的控制器,这个控制器可以进行一些简易的编程,有需要的朋友可以点赞收藏。
38律为科技-旗舰店![[邪修]会打字就能手搓赛博灯带控制器(保姆级教学) #esp32 #物联网 #DIY #AI开发 #电子电路](https://p3-pc-sign.douyinpic.com/image-cut-tos-priv/78d55b8fdfe8e455defb36bf7714e08c~tplv-dy-resize-origshort-autoq-75:330.jpeg?lk3s=138a59ce&x-expires=2098411200&x-signature=LnVREfPBBOHbwOhS0nr12ytmsEE%3D&from=327834062&s=PackSourceEnum_AWEME_DETAIL&se=false&sc=cover&biz_tag=pcweb_cover&l=20260703121651D30C134E5638F32E62AF) 03:54查看AI文稿AI文稿
03:54查看AI文稿AI文稿救命,都二零二六年了,还有人不会用 ai 开发互联网,今天传授互联网邪修秘籍,零基础会打字就行。今天开发 esp 三二赛博灯带控制器,跟上 a 级的节奏,小金鱼提示词粘进去, 这一次我们的提示词写的就很详细,首先告诉了硬件环境,说明了我们需要的功能,然后最后给了一下代码规范,一键复制就可以销路运行。好,现在我们点击发送,他就给我们代码了。 好,现在代码已经全部给我们了,我们点击复制,然后打开代码软件绿方块,我们先来选择好我们的开发版和端口,这个之前已经讲过了, 然后呢我们把代码全部粘贴,粘贴过来以后移到最上面观察这里输入我们家里面的 wifi 名称和 wifi 密码。 灯带引角是接到第四引角,后面接线会有演示,我的 led 的 灯珠有九颗就填九,当然这个根据实际情况修改就可以了,初使亮度为两百,它最大亮度为两百五十五。我们需要的硬件有 esp 三二、开发版,还有 esp 三二的一个扩展版, ws 二八一二。灯带, 我的线接的比较长,你们用短的镀邦线也可以。这个灯带上面呢会有这样的一个箭头,说明他灯带流动的一个方向,我们就从最后面的这一颗开始去焊接, 当然你们买到的应该是直接接好线的,我这个是用灯带直接夹断,然后自己焊接的。这上面呢有三个引脚,一个呢是五伏,一个呢是中间这个是 d n 数据输入引脚,最后一个 g n d。 好, 我们接线的话呢也比较简单, 顺着线找到我们中间这一个第一引脚,把它接在扩展版的第四号,第四的 s 这一列的引脚,也就是最外侧的这根 正极,也就是 vcc 接到五伏这个引脚, gnd 就 接到 gnd 好, 接好以后呢,我们把 esp 三二直接这样插到扩展板上,压紧好,然后我们接上下载线就可以了。回到绿方块,点击上传,正在编辑,时间较长,耐心等待一下,上传完成以后,它就会显示这样的一串英文, 我们打开串口监视器,在工具这里有个串口监视器,我们点击它, 打开以后呢,这里一开始是没有任何东西的,我们重启一下 esp 三二, esp 三二上面有一个按钮叫做 e n 按钮,按一下 串口监视器就会显示正在连接 wifi, 稍等一下就连上了,连接成功会给你一个 ip 地址,选中 ctrl c 复制,我们回到浏览器,按视频操作。回车就进入到我们写的控制界面了, 在这个界面可以更改灯带模式,灯带颜色,一键灭灯,开始愉快玩耍吧。 今天的项目总的来说就四步,一、用大白话想清楚干嘛。二、把写好的提示词未给 ai 生成代码。三、开发版和传感器接线。四、上传程序按照 ai 提示进行操作。
494AG造物坊 03:38查看AI文稿AI文稿
03:38查看AI文稿AI文稿介绍一下你的这个板子。哇,这个管脚很漂亮,后面还后面一般吧,但前面这垫子我觉得很漂亮。嗯, 这个应该应该有,三米肯定有,这个肯定改 全部的这个 出来好,试一下。 嗯,对的,线现在是有问题的,白线 a 二没问题, 拿个胶带上上下。这个接触不好,接触不太好,左右好,中间点好。不错,还会写的好。
8茜茜黑尔 02:10查看AI文稿AI文稿
02:10查看AI文稿AI文稿ok, 我 们先打开这个软件播放器,软件电脑是要跟控制器之间要连线,然后我们进入到这里的时候,我们看一下它控制器目前的状态是一个脱机的一个模式,就是没有连到,就电脑那边没有发信号过来。 我们现在的话是这边是做好了 sd 卡的文件内容在这里,节目在这边,那我们再点这个输出播放, 再点这个输出。 sd 卡文件输出的时候我们要哪些文件,我们就勾选哪些文件,那假如我们全选,那就把这些列表这个列表的全选,你可以多个列表都行,然后我们这个全选这里面就把这些全部全部全选完了。 那我们现在只做测试的话,勾选几个,这里你文件的一个多少的话,会决定这个文件的 sd 卡文件的大小,大小也是会跟我们传输速度有关系,你再点输出, 要输出之后我们这里可点烤卡,就直接烤 sd 卡文件的。然后这升级是把文件发过去,我们这个打开这个文件夹查看,打开的时候是,呃,在这里 这个 sd 卡文件里面,这个就是我们生产的那个 sd 卡文件。好,我们这里有一个在这个界面有个在线更新, 点击开始进行更新,那这时候他就会跟控制器会连在一起,会连控制器会变成连接模式。好,我们我们就勾选你要发的控制器,像这个的话是幺零幺编号,这里是幺零幺,那他就对得上就是第一台控制器的意思,勾选他要点这个发送 sd 卡文件, sd 卡效果, 然后点发送,发送的时候他这边就会一起变,他这时候这里就变成了在线呃, pc 连接,连接在更更,更新中,这里文件的大小会决定你这个发送的速度的快慢, 你选你的文件越大 sd 卡,看下那个 sd 卡文件越大,他这里发送的速度就比较慢的, ok。 我 们看一下他这里这准备发完了,这一发完之后呢,这边更新完之后,他这边就变成跳舞这个模式这个状态了,那我们在 这个界面把退回去,退回去主界面的时候,这边就会有拖连接模式变为了拖机模式。就他这个时候呢,他就会读这个 sd 卡,这边 他读的 sd 卡的速度的快慢,就跟这个里的闪的这个这个指示灯闪的快慢有关系。你每读一帧动画,他这里这里就闪一次, ok。
 02:16查看AI文稿AI文稿
02:16查看AI文稿AI文稿好,我们看一下功能演示,首先的话我们精确的数据有一个温湿度,光照强度,氧化碳以及一个土壤湿度,温度二的话可以切换我们下页页面的数据。好, 我们控制的设备有一个风扇,水泵,分频器,还有一个小灯光, 我们现在是手动模式,我们可以通过我们的 app 控制我们的设备,比如开启一个风扇。好,风扇转动,关闭风扇,开启水泵,开启灯光好,再看一下一个自动模式 好,开始自动模式,如果当我们的温度超过预值的话,会开启一个风扇进行降温,同时开启一个分频器,我看一下,好, 还不上,还有分辩器,当我们的土壤湿度如果小于预知的话,会开启一个水泵,还有分辩器看一下。好,然后我们现在用一个湿纸巾的话,让它的纸变大,让我们的土壤湿度的纸变大。好,帮我看一下, 现在会显示,现在会显示我们的土壤湿度四十多了已。好, 好,再看一下我们的氧化碳,如果超过预置的话会开启一个风扇,还有分频器,你看一下。好, 如果当我们的光照小于预置的话,会开启一个灯光进行补光,把这个预置调大,光照预置调大好,开启一个灯光,同时开启一个分频器进行提醒。好,这个是我们一个自动模式, 然后的话按键一的话可以通过我们的按键进行调节对应的域值按键三四加按键,四,减按键二是返回到主页面好,然后主页面 的按键二是下页的数据按键三四七二模式。好,这就是一个功能演示。
 03:39查看AI文稿AI文稿
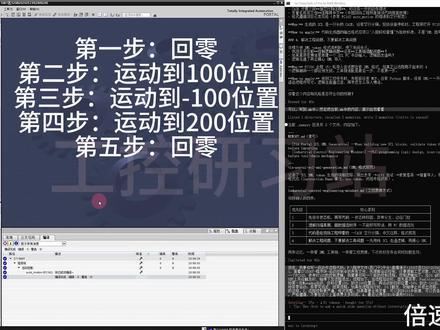
03:39查看AI文稿AI文稿今天呢,我尝试一下用 ai 来写博途 v 二零的 s c l 代码。我们这里是用的 cloud code 啊,接 deepsea 模型。 要实现的步骤也很简单,第一步,回零。第二步,运动到一百位置。第三步,运动到负一百位置。第四步,运动到两百位置。第五步啊,还是回到原点,我们通过和 ai 对 话来实现动作流程。 这里的 ai 可以 直接帮我们把需求升成为泊图 v 二零的项目文件。我们在 ai 工作时,完全不用操作泊图软件。 好,我们这里等待 ai 工作。 好,这个时候 ai 已经完成了,我们查看一下代码,然后编辑下载就可以测试了。 好,我们下载到 plc 中,然后看一下实际的动作。 ok, 再看一遍。
83工控研习站 02:53查看AI文稿AI文稿
02:53查看AI文稿AI文稿程序员注意,现在手机也支持 codex 了,但重点不是让你在手机上写代码,真正重要的是,你可以随时随地控制电脑上的 codex。 以前 codex 跑到一半问你要不要继续,要不要执行命令,你人不在任务就停住。 现在你在手机上就能看进度,批操作、改方向。过去的 ai 编程工作流有一个很大的问题,人必须跟着 agent 的 节奏走。 他问你要不要继续,你不在,他停,他问方案选 a 还是 b, 你 不回,他停,他要执行测试或者高风险命令,你没批准,他还是停, 这不是能力问题,是协助半径太短。 agent 很 强,但他被锁在电脑前。 openai, 把 codex 放进 chat gpt 手机 app, 但重点不是在手机上跑代码, 真正干活的还是你的 mac、 mac mini、 devbox 或者远程开发机。手机只负责看批改方向,文件、凭证、权限都还留在原来的机器上。这件事真正改变的是 agent 工作方式。 以前你在陪 agent 跑,现在是 agent 跟着你的节奏跑。你在地铁上可以看他跑到哪一步,你在开会时可以审一眼 diff, 你 在吃饭时可以批准他继续测试。你在路上发现方向错了,可以直接打一行字让他改。 你看官方信息里真正关键的表述,在 chat gpt 移动应用中开始新工作,查看输出结果,控制执行进度并批准后续步骤。 这句话的重点不是移动端,而是控制执行进度和批准后续步骤。也就是说,手机端承担的是 agent 工作流理的控制面,而不是代码运行面。具体怎么用?第一步,电脑上先跑 codex, 目前主要支持 macos、 windows, 还要等。 第二步,手机更新 chat gpt app, ios 和安卓都已经有 preview。 第三步,在 chat gpt 里打开 codex, 你 就能看到正在跑的任务线程。 第四步,在手机上看 beef, 看测试结果,回复新指令,批准高风险操作,甚至新建任务,继续跑。 这次更新不是让程序员在手机上写完整项目,他更像是给你的 ai 程序员加了一个随身遥控器,你不用把文件凭证、开发环境搬到手机上,你只需要在他需要判断、批准和纠篇的时候能立刻出现。 所以这次更新不是 codex 多了个手机版,而是你的 ai 程序员终于有了一个随身遥控器。对程序员来说,这比手机写代码重要得多。因为真正的效率提升不是你在哪里敲字,而是 agent 卡住的时候,你能不能立刻让他继续往前跑。
113沐晨AI笔记 05:13查看AI文稿AI文稿
05:13查看AI文稿AI文稿大家好,今天为大家分享的是工业机器人编程及应用,下面跟着镜头进入到实操环节。 大家好,我是今天的主讲老师,由我带大家看 p d d 来完成对 a b b r r b 幺二零的初步测试。本章内容就是介绍一下这个机型型号和这个型号的机型的安装 教学,内容是 r o b 一 二零的组成,还有机械的本体,控制器和计数参数的介介绍,这是我们的学习目标 操作机啊,这就是我们机械的那个操操作机,也叫做机械的本体, 它就是工业机器人的机械主体,是用来完成任务的执行机构。然后这是我们的控制器,它是用来控制机器人,按照规定要求动作,是机器人的核心部分,它就是机器人的大脑,就类似于人的大脑。 然后这个是视胶器,视胶器是工业机器人的人机交互页面,是针对这个,所有操作都是都可以通过消息来完成编程的。 我们来看一下机器人的模体。第二 r b 一 二零属于小型通用六轴工业机器人机器人模体共有六个轴,就是一轴二轴啊,这边一个二轴,三轴、四轴、五轴, 它泵体共有六个轴,每个轴均由单独的电机驱动,各个轴绕轴线运动。大家可以看一下,就是这个是一轴、二轴、三轴、四轴、五轴弯曲,六轴翻转, 然后看机械的泵体,他的后面呢就机械的后面有各个接口,一个是集成气的接口,可以拓展安装加大什么的。然后这是编码器电缆接口, 这是信号接口,就是机器人内置信号线,它可以通过接线然后传送到机器人的末端,加大这边,然后这机器人的动力电缆线接口, 大家可以看一下,这是集成信号接口,这是我刚刚接到的这个信号接口,然后这是集成气路, 也可以看一下 r r b 控制柜,分为标准和紧凑两种,书本以紧凑型 r r c 五控制器为例, 可以看下我们的操作面板,这个是我们的手动切换按钮,这个到后面我给大家主要介绍一下。这是按钮面板,电缆接口面板电源接口面板, 这是那个电脑接口模式啊,选择啊模式选择按钮用于切换机器人工作模式,这个是手动模式,然后这边是个钥匙,一拧,它就变为这个自动模式啊。这是机器人的即停按钮,在任何工作模式下,按下即停,按 急停按钮,机器人都会立即停止,这是上电复位按钮,发生故障时就要用磁按钮,然后对呃内部电机执行复位操作。 这是自动闸按钮,机器人释放自动单元,它会瞬间松闸,可手动搬动机器人。 这是 x a 四电缆接口,释压器电缆接口,主要用于释压器连接控制柜的,然后这是外部轴电缆接口, 这个是叉 s i 编码器电缆接口,连接机器人的编码器的啊。叉 s e 电机动力电缆接口,连接机器人的动力器接口,就是给机器人供电用的, 这是电源电缆接口,是用于给控制柜供电的,然后控制柜再给机器人供电的,这是电源开关,这是关,这是开, 这是主要技术参数。呃,我们来看一下机器人的这个工作范围,它有五十八厘米的工作范围,有三千克的覆盖,大家可以看一下重复精度,就是重复定位精度是非常高的,零点零一毫米, 这机器人的工作空间大家可以大概的看一下。大,大家要有个大概的认知啊, 可以看下极限的各种运动范围和最大速度 极限的额定负债。 谢谢大家,本堂课就结束了哈。
32智能制造滕老师 02:43查看AI文稿AI文稿
02:43查看AI文稿AI文稿想要成为电气工程系,必不可少的就是要学会编程,接下来由我将用一百张视频带萌新入门。想要编程,最先要学会的不是指令,而是如何创建。打开项目那么好,下面开始我们的第一讲创建新项目。我们先打开博图 v 一 六软件, 然后在左侧找到创建新项目,这里我们把项目名称改为创建项目 程序未及,我们就放在从零开始的文件夹里面,这里点击创建,等待项目创建中。点击打开项目系图, 左边就是我们的项目数。添加设备和编辑程序都要用的,这里我们双击添加新设备,这里分别有控制器、 hmi、 pc 系统驱动,我们选择控制器。以西门子 e 二零零为例 展开 cpu, 这里可以选择我们 plc 一 二零零的型号,要是我们有时机的话,但不知道是什么型号,只知道它是一二零零的,这里可以选择倒数第二个非特定的 cpu。 添加完球后会出现一个白色的 plc, 我 们点击获取, 点击开始搜索,可以看到这里我们找到时机的 p l c, 然后点击检测,这里要是搜索不到或者是无法检测,可能是你网段跟 p l c 不 一致,更改一下网段就好了。打开设计里面的网络, 找到高级网络设计,我这里第一个就是展开后找到更多适配器选项,再找到协议版本四双击它,这里就可以更改网段了。我 plc 的 网段是零, 这里我也是填的零零,后面随便填,不要跟 plc 冲突就好了。等待一小会儿就可以看到 plc 了,这里显示出来的就是你时机的型号,要是没有时机,我们就可以任意搅一个进行添加。 这里继续以一二零零为例展开 cpu, 找到一二一四 cd cd cd c, 选择最下面那个版本就选择最高的,然后点击确定就好了, 这样我们没有袭击,也是可以添加 plc 的。 本期视频就到此结束,感谢大家观看, nice。
7232工控新鑫


