闭合路线和附合路线的区别
首先闭合水准路线,大家通过图示可以看到,在这样的一个水准路线上,其实可以形成一个闭合的环, 他是从一个已知点 b m 一经过了未知的幺二三四等 n 个点,回到了 b m 一上 构成的这样一个水准路线,可以通过闭合水准路线得到在这个路线上的所有未知点的高程。 第二种复合水准路线,由图式可以看到,复合水准路线是从已知点 bme 复合到另一个已知点 b m 二上,在 b m 一到 b m 二的这样一个路线图中,途径了一点、二点、三点等 n 个点位, 这种方法可以测得这些未知点的高程。第三种之水准路线, 在知水准路线测定中,是从一个已知点 b m 经过水准路线铺设测到另一个待定点 a 点上。 老铁们会发现,在之水准路线上,从 b a m 经过点一到 a 点有两条路线, 这块要进行说明,因为之水准路线中的 a 点是一个待定点,所以在实际操作中没有办法进行验算。为了确保测得点的准确性,需要进行往反观测, 通过往返来求平均值,从而减少误差。

粉丝5.0万获赞17.6万
相关视频
 05:50查看AI文稿AI文稿
05:50查看AI文稿AI文稿到底是复合导线还是闭合导线?要搞清楚这个问题,那我们首先要明确复合导线与闭合导线的定义。 那符合导线是指起指于两个已知点的单一导线。注意啊,是两个已知点,那一个已知点,两个已知点这样过来属于什么导线?符合导线, 这个整个是符合单立向导线,这个老板的第一个导线视频里面就已经讲过了。所以注意,他是起指于两个已知点的单一导线,他并没有说起重点,必须要是这样子才叫符合导线。不是的, 两个已知点的单一的导线就是成为符合导线。那闭合导线的定义是什么呢? b 和导线是指起指于同一个起算点或者已知点的封闭曲线。两个名词,第一个是同一个已知点,第二个是封闭的。 那我们大家心中所理解的常规的句号大写什么样子?已知点,已知点, 这样子就是标准的壁虎导线,起止于一个移植点,形成一个封闭的。那这种图形, 第一,他时不时岂止于同一个已知点?我的次意图是怎么画的?以这个点为写算,这样子观测, 他这个是起点,这个是指起指点,并不是一个移植点,他不满足这个条件,不是同一个移植点, 所以他不是壁虎导线。那他是不是封闭的导线呢?也不是封闭的。封闭的是指什么意思?我理解的封闭的是指纯粹你由官司误差引起的壁虎叉,比如说这个壁虎叉,他是一个理论的,三百六十度是吧?内角和他是一个理论的, 那这个深处是个理论的,实际上不是理论的,为什么你的起作点他是含有误差的,不是一个封闭的图, 如果说这里你把它这个点我不连到这里,我是这样连过来,那是什么导线呢?那这样子情况就是闭合导线,或者说我再给你放开一点,让你有直观感受,就是怎么来,如果这个边我没有的情况下, 我不联系他的情况下,这是属于什么导线?这就是无定向导线。无定向导线是什么?是属于符合无定向导线, 所以说这个图形明确的告诉大家,他就是属于主播导线,只不过你开启了 哎形成的一个壁虎弯,实际上壁虎挡线是需要满足这两个条件的。那么这个视频老板再给大家回顾一下,关于符合挡线是分为几种,他下面有好几种, 第一种是标准的符合道线,比如说两个已知点,对吧?这样子, 这个是标准的符合导线。第二种是单定向导线,注意啊,前面我省了两个字,叫做符合单定向导线。 第一个视频我说过 一直点一直点,一直点有洗刷防伪角, 但是没有终点方位角,所以叫做只有一边有定向,有其他方位角的。 第三种叫做无定向导线,什么意思啊?我只有一个移植点,只有一个移植点,两个移植点不透视, 没有一个定向洗转边,但是他也属于符合导线,也就什么意思?符合导线,我们记住一个原则 是从一个已知点符合到另外一个已知点,那这种情况他就是属于复合导线,或者说我再告诉你,当你采用比如说王中文老师的 vba 程序来进行闭合导线或者复合导线的技术 来计算的时候,如果你是这个形状,你是采用符闭合打型的形式来计算,我告诉你算不出来为什么?比如说这个是一号点、二号点、 三号点、四号点、五号点、六号点,那你的关机的时候,你的软件里面数据怎么输入?一二三四 五六一,对不对?然后这里有个六对吧?你是六到一二三四五六是这样输入,这个输入的方式是什么?这个就是符合大型 这个视频就到这里,谢谢大家。
687测量老马 01:31查看AI文稿AI文稿
01:31查看AI文稿AI文稿大家好,我是胡老师,今天给大家来讲一下导线形式。 导线形式我们分为四种,第一个是复核导线,第二个是闭合导线,第三个我们是指导线, 第四个就是一个无定向导线。那么什么叫复合导线呢?这是我们制造了四个控制点,其实别人都有两个控制点,写通市中间有若干个加密点,通过现场测假测据最后平均加密点的这个坐标,这种方法 冯家复合导线,而冯家闭合导线就是知道了两个已知控制点,且通视中间加密了若干个点,最后又 回到这个点上面去了,这种形式我们叫闭合导线。那么什么叫指导线?也就是知道了两个控制点,且通视中间经过若干的加密点,他几乎闭合也不复合到 某一个控制点上面去,这种为指导线。无定向导线指的就是一头一尾,我们知道了控制点 中间经过了若干的加密点,通过测速设计好,最后凭他计算局中间加密点的这种形式,我们就叫无定向导线。
438何足道 04:25查看AI文稿AI文稿
04:25查看AI文稿AI文稿导线是我们工程平衡控制网的主要不适方法之一,那导线的不适方式主要有四种,第一种是壁虎导线,那壁虎导线呢?就是指比如这里有两个已知点, 导线点的表达方式是这种方方形,一只眼用这种双实线连接,中间你比如说加进来 n 个加密点,或者是 f c 的点, 在可同时的条件下用实线连线,那这样子就是壁虎导线。第二种就是复活导线, 符合大学就是只从一个已知点测量到另外一个已知点,中间经过了 n 个未知点。比如说我这边有两个已知点, 这里有两个移植点,中间也有 n 个需要加密或者复存的点, 这个就是标准的腹部表现。那还有一种,如果这里只有一个点,这里也只有一个点,这两点并且不同是中间有需要加密的点, 可不可以?可以,那这种就出位,符合我们定向导线,符合无定向。那还有一种,这里有两个,一点 是同事的,这里只有一个移植点,可不可以互相搞笑啊?可以, 那这种就称为符合单定向条线。 为什么成为符合单据线搞现在?因为这里是有起已知点,是有起到高的角的, 但是到这里的时候,你只有一个指,一只点,没有俯卧的方位角,所以就称为俯卧单,地下只有一边是有起发挥角,那符合我们地下是什么呢?就说你这两个一只点不透视,这边也没有,一只点这边也没有,那就是直接这样俯卧过来,所以就称为无地下导线,两边都没有起上方位角, 那第三组的不是发声就是直导线,那我只有两个点 相同,同时已知点,那我这里需要测量很多位置点,可不可以?也可以,这种就称为指导线,那指导线违反规定最多就允许进行两个加密点的测量。 那第四种就是导线网,导线网就是这里两个移植点,这里可能有一个移植点,这里可能要蹦出一个移植点,然后这里加密了很多点, 这里可能也同事,然后这里又有一个加密点,这里可能同事,这里可能是这样子,这样子,然后这里可能有两个 也是点,然后这个点可能也同时,那这种就称为导线网。那一般来说,这种导线网应该要必须采用研究平台软件来计算,像这种直导线、 淡定线,导线不计线,导线符合导线,我这种用导线都可以采用简易平台卖线来计算。那从机动上面来说,总体来看,导线网他的多余关 比较多,他的精度应该是最高的。其次应该是闭合导线,因为闭合导线你对你的发挥奖只有一个,只有一个其他发挥奖,那么他的相对程度应该是 最高的。那对于符合导型,由于我们理论上认为起算点他的控制点不超为零,但实际上他一定是含有起算误差,所以说他的精度实际上是不如闭合导型的。 但是由于俯卧倒线四个起重点,那他的可靠性应该是优于壁虎导线的。那不定性导线应该是京东比较差的一种,推算过来的时候,他虽然没有发挥成壁虎叉,但是他也做了壁虎叉,所以说他的京东是优于制导线的, 所以指导线的经络是最基本,那比如定向导线经络稍微高一点呢?就是符合单一线导线,为什么两个一只脸为起算,计算过来给你一个形象高的角,推算过来的时候给你 虽然没有方位的标准,但是他也都很漂亮,所以说他的精度是比他要高,比他低一点。那下个视频老马在讲每一条导线他的适用产品和他的关词方法。
1629测量老马 07:27查看AI文稿AI文稿
07:27查看AI文稿AI文稿今天分享工程项目中经常用到的导线测量。导线测量分为闭合导线、复合导线和直导线。 这是一个闭合导线的图形,从 ab 两个已知点出发,最后回到 b 点,形成一个闭合的多边形,叫闭合导线。闭合导线比较适用于项目现场厂区的控制点的加密。 第二种类型,复合导线,从已知点 a、 b 出发,回到 c、 d 两个已知点进行控制点的加密,叫复合导线,比较适应于线路型的控制点的加密。第三种类型之 导线,两个移字点往外延伸,增加控制点。这种支导线因为没有约束条件的平差,精度不可控,所以用的也比较少。在进行导线测量和平差之前,我们需要先了解几个基本的概念。第一个是坐标方位角, 坐标方位角讲的是从一个点的正北方向顺时针旋转到另外一个点所形成的夹角,叫坐标方位角 啊。 a b 两个点的坐标方位角 alpha a b, 那如果是 alpha b a 呢?啊,应该是这个角度, alpha b a, alpha a b 和 alpha b a 两个角度相差一百八十度。再讲一下方位角的推 算啊,这是一二三四四个加密控制点,这是测量的一个前进方向,已知了二号一二以及一二三之间的一个假角。贝塔二要计算二号二三这个方位角, 那怎么算呢?我们增加一条辅助线, 根据平行关系,我们知道这个角度就是二划一二,我们现在求二划二三,是不是需要知道这个角度就可以了? 那这个角度是不是等于一百八十度?减去贝塔二就是刚好是这个角度,也就是说二划一二加上一百八十度, 减去贝塔二,就等于二法二三的方位角,方位角的推算就是这样来的。 好,接着讲一下坐标正算啊。坐标正算我们车辆朋友应该都知道,这是最基本的常识。已知 a 点的坐标以及到另外 b 点的距离以及他们的方位角,用来计算 b 点的坐标。 由三角函数关系,我们可以知道 a、 b 两点的 x 轴方向的增量等于扩散引二法 a、 b 乘以 d, a、 y 轴方向的增量等于散引 二法 a、 b 乘以两点的距离。这里也有一个坐标增量的计算公式。 再讲一下坐标反算,已知 a、 b 两点的坐标,计算 a、 b 两点的距离以及他们的一个方位角,这是他的一个计算公式,就不多解释了。了解完以上基本定义,讲一下导线测量的基本计算原理。以复合导线为列, 从 a、 b 两个椅子控制点能够侧角和侧距进行六个导线点的加密,回到 c 点和 d 点, 根据 a、 b、 c、 d 四个已知点的坐标可以计算出来 b、 a 的方位角以及 c、 d 的方位角,可以知道 b 点到 c 点 x 轴方向的 坐标增量,以及一点和 c 点 y 轴方向的坐标增量。根据车角和车距,我们可以推断其中每一个导线点在 x 轴方向的增量以及在 y 轴方向的增量,还有他们的一个方位角。 再回到六点到十一点到 d 点,我们可以得到一个实测的方位角,那么实测的方位角和 cd 两点的理论的方位角有一个角度的差值,这个差值就是叫做角度闭合差。 然后六点到十一点的坐标增量,他的实测值和理论值也有一定的偏差, 这个偏差我们用这个图来看一下,这是理论方向的 c 点的坐标值,但是我们在实测角度和距离的时候有一定的误差, 实测的点位在这个位置,那么 x 轴方向的增量和 y 轴方向的增量有一定的偏差,叫 f x, 这个偏差值 f x 方向等于实测的累计的 x 方向的偏差,减去理论的 x 方向的边差, i 轴方向也是同样的。 最后我们可以计算出来距离方向的一个偏差值, f s 等于 f x 的 偏差值的平方,加上白轴方向偏差值的平方开根号,这个误差在测量规范当中有相关的一个限制和约定。比如说 工程测量,一级导线、二级导线、三级导线,不同等级的导线对应不同的一个地和差的允许范围。 接着讲一下闭合操的调整,根据规范要求,如果闭合操超线了,那说明导线测量不合格,现场需要重新测量。 如果说闭合叉在允许范围之内,需要对闭合叉进行分配和调整。先讲一下角度闭合叉的调整,用角度闭合叉 除以车站数的相反数,加到每个车角当中,完成了角度闭合差的调整。 距离方向的调整,根据实测边,在诊断导线测量当中 所有边长的一个比例,乘以距离闭合差的相反数,再分配到每一条侧边当中,就完成了距离方向的一个调整和分配。 闭合导线其实也是同样的一个原理。下个视频实列讲解闭合导线、复合导线的一个频差和技。
1300大刘工程 04:34查看AI文稿AI文稿
04:34查看AI文稿AI文稿来分享隧道控制测量真实案例,对进山隧道,感谢网友提供的计算数据。现场采用的测量仪器,导线测量来卡 ts 零九,水准测量来卡 dna 零三。 现场进行导线控制测量的照片, 这是水准测量照片。 再看一下现场的观测记录表格,这是导线测量观测的水平角和距离, 这是水准测量测得的数据,现场外业数据 已经整理成了电子版本数据,现在来评差计算。打开坐标数据处理系统 v 三点零 点登录,点击选项卡当中的闭合复合导线平插,先清空数据,接着将整理好的数据复制粘贴到表格当中, 这里有对应的数据输入,提示粘贴完成以后选择计算导线的类型和等级, 这是工程测量四等导线。接着点导线计算提示平插完成, 数据合格。蓝色部分是已知点坐标,黑色是平叉完成后的坐标。 角度闭合差十一点七秒,允许闭合差正负十五秒。角度闭合差在允许范围测距中误差三十九万,允许中误差三万五千在允许范围。 接着我们还可以在 c a d 图中绘制导线简图,到 c a d 中绘制简图,确定打开 c a、 d, 在命令行直接粘贴, okay, 因为这是一条隧道导线,不点是成这种直线型, 这是已知点 gy 三和 gy 四,这里有重叠的。移动一下, 这是导线的一个简图,加个标题打印出来作为提交报告。另外银叉计算报表可以直接打印, c t、 r l 加 p 打印,直接打印成果提交。 接着我们再来看一下控制网的复合水准路线平插复制数据 点选项卡当中水准高成平差,先清空数据, 复制复合水准路线的数据,在表格当中进行一个粘贴,这里 有对应的输入的提示,粘贴完成以后选择水准路线的等级,然后点水准计算, 可以看一下全长的闭合叉,负一点五毫米,允许闭合叉四十四点五,在允许范围数据合格,也可以直接打印成报表。 nice, ok, 我们再来看一下闭合导线评差结果,和其他软件评差结果的比较 是一模一样的。 ok, 这个案例就和大家分享到这里,感谢周围网友提供的数据和对比三点零软件的建议。
724大刘工程 04:37查看AI文稿AI文稿
04:37查看AI文稿AI文稿标准的复活导线或者闭合导线,在我们工程控制网中,尤其是高速工程控制网中实际上是非常少见的,更多的情况是这种比较乱的 导线网的形式。以这样一个头为例,来讲解导线网的关词方法。这里有一个已知点,已知点,已知点,已知点,五六七八个已知点, 那我在中间进行加密或者是复测的话,这些男生的点位应该怎么观测呢? 总体的远征还是和闭合导线、复活导线没有什么区别,因为我们全队有的功能就是测脚、测距。如果我的导线走第一站是往这个方向走的话,那我加这里一 这个点问题的方向关在这个水平角,那这个点就称为有三个方向叫做节点。 这个节点拿正点的时候一个原则,就是在一站你有条件把所有的发型都关锁完,就关锁完, 那么我第一站应该是官司这个角,第二站官司这个水平角摆正的官司板。那这个是你的方向,选择有两个,第一个是这边走,这个是这边走,如果我选择往下面走的话, 那你第二天在这里以还是以后面这个点为你方向,就说我们所有的观测习惯或者流程,最后养成自己的一个顾虑的习惯,比如说以后面的点来这里这样子的观测,这个简单, 水平角边长都要观测好。观测到这里的之后,因为你的档型是这样走的,那你这个点还是以这个点为点方向,首先观测这个水平角,再观测这个水平角,这里有四个方向,那你再观测这个水平角, 把所有能关注的全部都关注掉,除非你这个点不想要,对吧?这样关注之后你还有两个选择,一个是打算往这里走,一个是往这边走,如果是往回走的话,那这里以及在这里还是以后面这个点位置发现这样关词, 然后这里有三个方向一样的,以后面再往前方向这样观测这个水平角,再观测这个水平角,观测这里之后整个这一条就观测完了,那还剩剩下最后一个点,对吧?这里你可以还是以后视点, 我想观测这个水平条,那这样子就这一图就观测完成。那还有最后两条边,到这里的时候,如果你先观测这条长度线的话,选择以他为零方向,这样子,这样子,这样子 还是最后一个点,那你还是继续压在这里完成这个点。如果这个时候这里只有一个点怎么办? 如果这个时候这里只有一个一只眼, 你在这里观测他的水平角之后,那这个点第一你要还是不要,就在这个站的时候,你观不观测这个点,那我建议你是观测这个点,因为他既然是已知点,那么就可以 增加一个约束条件,也就是说增加你的网形的这个强度,是吧?那这样子你反击的时候只需要随个边就可以了。那整个这条路线下来呢?你看有冰火导线,有符合导线,还有几条,还有符合单电线导线, 那这个视频考一下,大家在整个这个网中有几条壁虎导线,单体线导线,还有壁虎导线,好吧?在评论区打出来告诉我,那整个这个头观下来可看呢?这样走是这个水平角,这样走又是这个角, 对吧?这样子是这个角,那各种左脚右脚穿插在一起,这个时候我们采用简单的平叉啊,符合到相关的闭合短线就很难平叉。这个时候我们应该采用严密平 软件,整个放在一起来进行演变,平常就可以了。那下个视频我们再来讲隧道里面科学的爽。
539测量老马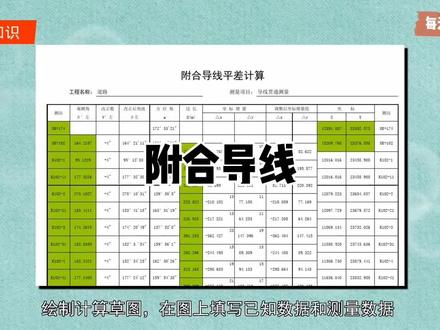 00:39查看AI文稿AI文稿
00:39查看AI文稿AI文稿复合导线是导线测量的一种通过测量夹角和边长计算点的平面坐标的方法,称为导线测量。常用的导线测量还包括闭合导线和指导线。 复合导线是由一个已知边出发开始测量,经过若干未知点到达另一个已知边,通过外页测量得出各控制点之间的距离以及观测边之间的夹角。 业内计算出个加密点的坐标值,绘制计算草图,在图上填写已知数据和测量数据。角度。闭合插的计算与调整按新的角值计算个边坐标增量。坐标增量。闭合插的计算与调整。根据坐标增量计算坐标。
98科普知识 06:26查看AI文稿AI文稿
06:26查看AI文稿AI文稿大家好,接下来为大家讲解一下复合导线平插软件的使用。首先我们将软件打开看一下我们的一个例题, 某一级复合导线外页记录如下,各点坐标值如表所示,计算各点坐标并检验是否满足精度要求, 这里我们可以看到我们四个已知点,我们要求一二三四四个未知点的一个坐标, 下面是一个外页记录表, 这里是我们的一个起算的观测角, 接下来我们看一下这个软件如何使用。首先要输入导线点的一个个数,符合导线的一个导线点个数就等于我们的一个位置点, 加上我们的四个已知点,也就是说这里是八个导线点,我们这边用的是右脚好,然后点击生成表格, 就可以得到一个这样子的表格,我们将数据填写在表格中的绿色区域,绿色方格内 时间关系我这边就不一一填写了, 要注意我们这里观测角的一个填写格式是度后面用点来间隔开来,然后分和秒中间没有任何的符号,也没有任何的空格, 如果我们这边给他加一个句号的话,这里去点击计算,他会出现输入数据有误,请检查后再计算是不可以的,我们这里将空格去掉,然后再次点击计算, 就可以得到我们复合导线的一个内页计算表。还要注意我们在点击计算的时候,我们的这个鼠标要点在表格外面 点击计算,然后我们算出我们的一个个点的坐标,之后点击 cid 乘除, 就可以直接得到我们这个复合导线的一个 cid 图形,当然前提是你的电脑里要有 cid 这个软件,否则也无法成图。 好,这就是我们复合导线的一个内页计算,那我们是否 可以用复合导线计算软件去计算闭合导线的数据呢?是可以的,我们先看一下我们闭合导线的一个数据, 这是我们闭合导线的一个数据,这里我将 c 改成 b, d 改成 a, 这样会更直观一点,我们 b 和导线其实就是一种特殊的复合导线,最后的一个已知点就是我们的一个起始点, 我们同样的点开我们的软件,这里的导线点个数就是我们的已知点,个 个数乘以二加上我们的位置点。这里的已知点是 ab 是两个,二乘以二等于四四,加上我们一、二、三三个位置点,所以这里的导线点个数为七。点击右角生成表格, 时间问题我就不一一将数据输入进去了,同样的,这里的度数也是 度,后面用点表示分和秒,中间没有任何符号,也没有任何空格。这里 可以看到这里的四个已知点,其实是两个点,我们将数据填写进去后,点击我们的软件,点击计算, 就可以求得我们闭合导线的一个内页数据跟复合导线是同一样的,同样的也有角度闭合插,角度闭合插的比较,导线全场闭合插和导线全场闭合插的比较。 点击 cid 程图,就可以更加直观的看到我们这个闭合导线的一个 cid 图形。 通过图形我们可以更加直接的理解为什么复合导线的计算软件可以计算闭合导线。闭合 导线其实就相当于是 a 点到 b 点,再有 b 点到一点,一点到二点,二点到三点,三点到 b 点, b 点到 a 点,这样的一个导线不设方法,所以 我们用复合导线计算软件也可以计算闭合导线的一个数据,大家如果有需要的话可以到后台领取我们的一个软件,也麻烦大家关注 评论转发,后续还将持续更新一些实用的小工具,再见!
 01:18查看AI文稿AI文稿
01:18查看AI文稿AI文稿同学们好,今天我们一起来学习导线的布设形式。常见的导线布设形式有三种,第一种,闭合导线,第二种,复合导线,第三种,织导线。 首先我们来看闭合导线。闭合导线是从一个已知点和已知方向出发,经过若干个未知点,最后回到起点, 形成一个闭合的多边形,这样的导线称为闭合导线。由于闭合导线本身存在着严密的几何条件,因此具有减合的作用。 下面来看复合导线。复合导线是从一个已知点和已知方向出发,经过若干个未知点,最后复合到另外一个已知点和已知方向上, 这样的导线称为复合导线。由于起始边方向和中边方向,已知,这种步车形式也具有减和的作用。 第三个指导线,指导线是从一个已知点和已知方向出发,最后既不闭合也不复合,这种导线称为指导线。指导线由于图形不具备减和条件,因此不推荐使用。
 01:32查看AI文稿AI文稿
01:32查看AI文稿AI文稿呃,我们上节课呢讲过的是符合导线是吧?符合导线。那符合导线和闭合导线的关系,其实他俩的计算方法是一致的。 我们从复合导线首先从 a 点出发来到 b 点,经过了两个位置点二和三,然后到了两个已知点 cd 对吧? 因为我们 c t 的坐标啊, c t 的坐标是可以变化的对吧? c t 的变做坐标变化的话,那 c 点和地点也就跟着这变化对吧?也就跟着这变化。 那如果我们让 d 点的坐标等于 b 点的坐标,然后 c 点的坐标等于 a 点的坐标,那此时我们就可以得到这么一条这么一条形状的导线的嘛。 ab 出发,然后经过了到了二点,然后再到了三点,然后到了 c 和 d 这两个点。 但 cd 这个时候他取了一个特殊的指,就 c 点坐标等 a 点坐标, d 点坐标等于 b 点坐标。此时呢,我们就把一条符合导线就变成了一个 闭合导线。所以由此看出来,你这个符合导线要会算的话,闭合导线基本上就会算了,对吧?就会算了啊。那好,那我们讲今天这个闭合导线。我先把上面的给清一下。
2sgz 07:14查看AI文稿AI文稿
07:14查看AI文稿AI文稿导线测量的内页计算。闭合导线计算图中依次给出用于闭合导线计算的视力数据, 给定五个点, a、 b、 c、 d、 e, 其中 a 点为已知点,给出已知坐标 已知 ab 边的方位角,观测得到五条边的边长及五个角的观测角。根据以上数据计算代测点 b、 c、 d、 e 的坐标。 具体计算方法如下,该表为闭合导线坐标计算表。将导线计算草图绘制,在草图区域,填入已知数据和观测数据, 首先填写点号,接着填写所得到的观测角, 再次填写坐标方位角 a 点的坐标值,最后填写距离。 填完数据后开始闭合导线内页计算。先计算观测角之和,然后计算闭合插, 再计算容许误差,当容许误差大于闭合差时,判断所观测数据为合格数据, 否则外页重测。再按照公式进行观测角。闭合插分配。分配的原则为平均分配, 且单位取字秒,如果平均分配后还存在少许秒值没有被分配,则可以分配至大角或者边长最短的角。现在开始观测角。闭合插分配 分配完成之后,应检查所分配的闭合插是否和闭合插大小相等符号相反,并计算得到改正后的角值。改正后的角值等于观测角值加闭合插改正数, 同时计算出改正后的角值之和。接着进行方位角的计算。根据其实坐标方位角 按照公式进行计算,该处计算取加号,如边 bc 的坐标方位角等于边 ab 的坐标方位角。 二二六度五七分零二秒,加幺八零度,加九六度零九分二七秒,等于幺四三度零六分二九秒, 依次计算出各标音的坐标方位角。若计算所得方位角大于三百六十度,则减去三百六十度。最后核实 a 到 b 的方位角是否正确,防止中途计算发生错误。 紧接着计算坐标增量,用坐标正算的公式进行计算,如第二台 x、 ab 等于幺五八点七幺,乘 posa e 二二六度五七分零二秒,等于负幺零八点三四零。 第二套 yab 等于幺五八点七幺乘赛影二二六度五七分零二秒,等于负幺幺五点九八零。依次完成各个坐标增量的计算, 并计算各坐标增量之和。如第二台 x 的坐标增量之和为正零点零七九。第二台 y 方向的坐标增量之和为负零点零九六。 在辅助计算中完成 f、 x 和 fy 的填写,同时根据 f x、 fy 计算出 fd, 并完成 k 值的计算。若计算出 k 值小于允许误差,则表示边长观测和角度观测合格, 接受计算坐标增量改正数。坐标增量改正数等于边长,除总边长乘负总改正数。 如 ab 边的 x 方向改正数等于幺五八点七幺,除五八七点八一乘负零点零七九,等于负零点零二一。依次完成计算。 如果存在小数位数,则取整至毫米。若计算出的改正数求和之后,和带分配 的改正数大小相等,符号相反,则表示带分配的坐标增量改正数已分配完成。如果大小不同,差一点点,可以将这一点分配至长边。 迪尔塔 y 的分配方式和迪尔塔 x 一样,依次进行计算并完成分配。 接下来计算改正后的坐标增量,改正后的坐标增量等于对应的坐标增量加改正数。 如 ab 边。改正后的坐标增量等于负幺零八点三四零,加负零点零二一,等于负幺零八点三六幺。依次进行计算。计算完成之后, 将改正后的坐标增量求和其改正后的坐标增量之和,因为零,因为计算的是闭合导线,如果不是闭合导线,是复合导线,其改正后的坐标增量之和,因为起终点两点的椅子坐标值之差。 y 方向坐标增量改正方法与 x 方向一致。依次完成计算并填表, 最后按照公式计算待定点坐标,如 xb 等于五四零点三八零,加负幺零八点三六幺,等于四三二点零幺九, 依次完成。 cde 三点坐标值得计算并填入表格。 最后,一定要检核计算 a 点的数据是否和给定的已知值相同,如果相同则表示计算正确,不同则表示计算错误,应该进行检查。 上述导线内页计算中的各项线插,请根据实际作业情况参考相应测量规范。 此为整个闭合导线内页计算流程,计算较为繁琐,需要认真仔细。
1.2万测绘二哈 01:00查看AI文稿AI文稿
01:00查看AI文稿AI文稿闭合水准测量,今天我们来讲闭合水准测量, 首先我们将水准仪加设在 ab 终点, 先观测出 a 点的测量毒素并记录下来, 然后观测记录必点的测量毒素。 接着呢,我们将水准仪搬至 bc 终点, 观测出 bc 的毒素,依次类推观测出所有点的数据记录下来,然后将所有的数据进行平插,最后呢,把平插和允许误差来进行 对比,在允许误差范围内就没有问题了,你学会了吗?
1751测绘玩家 02:17查看AI文稿AI文稿
02:17查看AI文稿AI文稿同学们好,今天我们继续学习复合水准路线的内页计算。第二部分,上一节我们计算了高差闭合差小于相应的容许值,成果合格。那么接下来我们就可以进行高差闭合差的调整。调整的目的是要使高差闭合差调整为零。 调整的原则方法是按照与测站数或者测断长度成正比的原则,将高差闭合差反号按比例分配,得到各侧段高差的改正数。 这是改正数计算的两个公式。左边的式子是将闭合差按照与战术成正比的原则进行分配,右边的式子是将必和差按照与测断长度成正比原则进行分配。在运用的时候,我们根据实际情况进行选择。在本 简历中,带有数字可以求得各侧段的改正数。为了检验各侧段改正数的计算正确与否,可以进行计算减和。如果计算无误,将各侧段改正数求和应该等于必和差的相反数。 然后将各侧段高差的改正数填入表格的第五列,我们发现改正数的和与必和差的相反数相等,计算无误。 下面计算个侧段改正后的高差等于各侧段观测高差,加上相应的改正数,用字母 hi 一杠来表示。 然后将计算出的改正后高差填写在表格的第六列。我们发现改正后的高差之和等于 b 点高乘,减去 a 点高乘,计算为 五。最后一步,计算待定点高乘。根据已知点 a 点高乘和各侧段改正后的高差,即可依次推算出个待定点的高乘。在本例中带入数字,可以依次求得个待定点的高乘。 为了进行计算减和,可以继续推算必点高乘。如果推算出来的必点高乘与已知的必点高乘相等,证明计算无误。然后将推算出来的个点高乘填写在表格的第七列,完成了复合水准路线的内页计算。
 00:59
00:59 06:07查看AI文稿AI文稿
06:07查看AI文稿AI文稿这哥们的问题啊,就是符合导线,始终发现精度不符合规范,也就是超线。怎么发现?是关系的问题还是已知点出了问题?那么你超线就是一般是几个原因,第一 你的方位角闭合插插线,第二你的导线全长闭合插线。那么大概率的问题。以我们现在的导线都是你的方位角闭合插插线。那么呢,怎么样呢? 判定你是观测的误差还是控制点本身的误差呢?如果说是闭合导向,就不存在这个问题,肯定是你的观测误差。 但是如果说是符合导线,那么就有可能存在这样一个问题,是控制点本身的精度不够而导致你的超线。因为如果说反过来理论上讲,你的控制点的 你的观测误差为零的话,那你还是超线,那就肯定说明是控制点的问题。但是我们没有办法做到观测误差为零。那建议大家记不记得这个规范。上面说的一句话,对于四等级上进度的导线,要进行左右角的观测, 大家想过没?这是为什么?我们判定侧角重物差的方式对于导线来说有两种,第一种是方位角的闭合差,第二种就是这种左右脚观测,左右脚观测的闭合差就是左右角有三百六十度之差的闭合差。 他的计算四角中误差也是第二种方式。那么对于我来说,比如说我的一些进度比较好,我的观测方法比较严谨,那么在这种情况下,我就认为我的 观测误差会控制的比较小。但是我的结果 b 和叉还是比较方向,和 b 和叉还是朝线的话,那么我就可以判定是这个控制点的咨询的进度存在问题。这个问题我曾经在我的工号工号,也叫也叫财产号码 在公号里面专门写过一篇文章,或者以前直播讲过。就如果说控制点的自适应性都不够的情况下怎么办? 我的闭合一人超线,那么我建议是采用左右角的,那左右角的方式来观测,来计算你的侧角重物差。如果这个时候你的侧角重物差进度很低,比如说一级导线达到五秒或者达到三秒,但是方位角的变化差还是超线,那么你就可以判定你的 细算点有问题。但是如果你是采用常规的左右简单观测是吧。 啊,后视呢?之零测前视,前视,之零测后视。那么这个所计算出来的测假中文差可能带一定的假象, 大家要懂得区分。好吧,我之前是专门发过一个抖音的啊。呃,就说呃,指导线。 有一个哥们说知道线没有办法来计算四角中午茶。我告诉他知道线当然可以计算四角中午茶怎么计算?就是左右角来计算啊。不清楚的哥们去可以去查一查规范。好吧, 为什么这么说呢?因为我们所认为的高级控制点。你比如说你要加密一条四等导线,那么你如果是从三等导线来加密的话,那么理论上认为你的 计算点误差为零。但是实际上这个起算点是一定有误差的,何况是我们现在这种工程策略的环境下,他的误差可能比你想象的要更大。所以这个时候我对所有的控制点, 甚至对所有的设计数据,我实际上都是抱着一个怀疑的态度。我先打几个问号,不能说他是高级点,不能说他是设计教的点,就没有错误,对吧?这样的案例我之前分享过很多,比如说我们在长安高速,人家给的控制点, 我做导线去复测纵向 b 和叉是吧?我的方位角 b 和叉没有超线,我的 deta y b 和叉没有超线,我的 data x b 和叉有十公分是 什么问题?经过我的导向复测,我就找实习院的,他说我们没有错。我说我告诉他 我是怎么测的。我的导线是一条直升行,一条高速公路是隧道,我的方位角比我长很小,我用的莱卡 tc 二零点三来测的,虽然我的转直线很小,但是部分地方我是采用三点九加法对吧?然后我的德坦 y 屁股上很小,带着 x, 屁股上突然有十公分,那么是代表什么意思?这十公分就是测距的误差, 但是我的导线是直升型的,我的距测距都是我往返观测,你告诉我十分十公分,还有十公分的必过叉,我敢不敢强制平叉?我一般讲行之后,设计院就直接告诉我 是我们的交装控制点有问题。为什么呢?因为之前我们是别人干到一半的高速公路,别人不干了,我们去做。那别人在之前不设控制网的时候,隧道没有通,他做镜头的时候算不活。 酸薄荷是里程上酸薄荷,是松下酸薄荷。他把十公分的误差消化在了隧道这个里面, 就是隧道的长度,要么是变长十公分,变短十公分。但是没想到我们去,我去测导线的时候,我进场的时候隧道已经通了,那我就直接从隧道里面从那边走一条导线过来,那么这样一连起来之后,我们有十公里那个标段,一连起来之后, 相对他是在隧道的,那边是一套解算,这边是一套解算,但是没想到我经常 把整个联通了,就发现了他的问题,对吧?所以这个东西我们要大胆的怀疑,但是前提是你自己一定要有这个底,你能够说服他,要不然他真的是不认账。
623测量老马 14:36查看AI文稿AI文稿
14:36查看AI文稿AI文稿大家好啊,讲一下无定向导线的贯彻与计算啊,无定向导线的本质呢?它是应该是叫做符合,属于符合导线的一种啊,主要的情况是现场比如说有这两个点移植点,但是呢不同事 如果说你中间需要加密一些点的话,那怎么办?可不可以?呃,这里明确的告诉大家是可以的。呃,因为比如说比方说中间你有一个房子挡住了是吧?在房间中是用的最多的,或者说在我们的线路工程测量中,你有些部分点 别毁掉了,或者说中间搞的什么都有。不同事的,那这个时候你再想恢复一点是可不可以?可以的,需要做的事呢?你比如说这里我要加密两个点的话,那你需要做什么呢?就是从这个椅子点 a 到这个加密点,然后再到这加密点二到 这个椅子点保持相互同时就可以了啊。至于观测呢,我们第一站可以架在这个 a 点观测这个点,那这个点时候我们是只有一个方向的,那么就只观测他的边长就可以了,那第二站呢,就架在这个加 v 点,然后呢以这个椅子点 a 为你们方向观测 这个加密二的这个水平加角就可以了,这个也称为我们称为左脚啊,然后观测这个边长,观测这个边长往返边长都要往返观测啊,然后第二张再加在这个加密二,以这个加密一为零。方向 之年嘛,就是再关系这个逼点的这个水平加价,是吧?那么这个也是一个左脚同时关系这个边厂。最后一张呢,建议你在家的逼点把这个加米亚的边厂再测一下,当然 这里不测是吧?你到这个加密点,哎,到这个加密点的变成不测也是可以计算的,因为你的观测数据已经足够了。 嗯,建议大家观测的原因呢是这个,你因为一些能性呢,都有这种误差,那么你往返观测的会重新需要重新驾驶一些和人性,那么对你的精度会有有力一些。 那么这个无定向导线呢?他的计算呢?因为我们如果是一条一条正常的一条导线啊,比如说这里有个椅子点 a, 然后这里还有一个椅子点 a, 一般是这样子是吧?那么呢,一般是我们是可以首先计算出这个椅子点的这个,呃,坐标方位角是吧?通过可以计算这个坐标方位角,把这个 通过这个防伪角反射这个坐标反射防反射防伪角,然后再来,哎,根据这个啊,比如说在 这一站官司的这个水平夹角,是吧?再来计算这个 a 点到这个点的是坐标方位角,然后把方位角逐一推算出来,然后根据方位角和官司的边长就可以把这个坐标算出来。但是我们现在呢没有一个起算点, 那么总的计算思路呢?是你没有的话没有写上方向,那你就假随给定他一个方向,比如说给定 a 到这个点的一个方向,比如说是一百八十度的话是吧?然后方向有了, 然后这个比如说你改进他一百八十度是吧?然后再根据这个关系的,也就可以算出这个方位角,然后根据这个关系角可算出这个方位角,然后也就可以根据关系变长把这个背景的作品算出来, 但是因为你是假机的方向,你算出的路线呢?比如说我这个 ab 点,我是根据实测坐标站在 kc 里面的,那我实际上 假金的方位角算出来的,那现在可能就是到了这个样子了,是吧?实际上可能就到了这个样子了,这个是 a 点,那么这个这个点就是我们的这个啊,算出来的这个逼点就是假金方位角算出来的逼点的位置,是吧? 那这个时候删除之后,我们,嗯,其实有计算方法有几种啊?呃,最简单的嘞, 就是怎么你上车之后把这个假坐标把它展在这个,比如说把这两个坐标把它展在展在这个啊? k 四里面,那这个时候呢?比如说这个,这个这个我是不知道的,是吧?展到 k 四里面之后呢?然后你再这个是我们算的假坐标吗?然后再用这个,哎,进入边界车站改正里面的 作,别纠正,是吧?然后比如说我这个找,找到两个公共点,用这个点还是这个点,然后这个是计算出来的比, 然后再选择这个纠正后的这个一致点,哎,再到这个真实的这个逼点坐标选中之后,然后再选中这个你的这个关系点, 然后就会把这个作品扭过来了,也是可以的。但是这里会有个什么问题?因为是我们是不定下导线,他毕竟还是有一个多余观色,是什么呢?就是我们这里的这个,呃, 会有一个纵向的,这个坐标必火差。有一个纵向的嘛?就这个指我们这个岛这个 ab 纵向方向会有这样一个坐标必火叉, 是吧?会有一个座位比火差,那这个时候你实际上既然有座位比火差就多有关系,我们就需要进行平差,那这个赚的你平差就不太好平,是吧?啊?你你 这个插纸,是吧?所以说我们实际上导线比这个指导线的精度是要高的,因为指导线你观测,你这样观测过来,是吧?边角是唯一的观测条件, 你没有任何多余关系就没有没有办法平常,是吧?就没有办法平常,那这个除了这个这个 k 词里面这样转之外呢?呃,还有一个就是在课上里面可以算,但是课上呢,他这个真本的呢,这个又比较高, 是吧?然后是这个如果是,嗯,像倒车好像也可以算车主员,我不知道可不可算啊?倒车也可算,但倒车的也还也也比较高,是吧?嗯,所以呢这个王志伟老师呢,他就开发了一款刚开发的啊,这个无定向导型计算的程序,刚开 看法的这个程序跟之前的这个符合导向,六合导向,其实他的格式啊整过来都差不多,是吧?你这里可以输入你的这个选择,你的这个啊规范啊,虽然说现在比如说功能性的标准他有更新啊,但是他对于呃一些导线的基本的判断 他是没有区别的,他的判判断指标是没有区别的,是吧?啊?直接输进来就可以了,然后呢,这个用过的都知道啊。哇塞,这个这个这个表格呢 啊,直接你身上可以直接打印出来,作为我们的平常报告都是可以的,是吧?那么这里呢,我就模拟模拟了一种数据,是吧?这里有一个 a 点, 这里一个逼点是两个椅子点,坐标有,那我观测的这个水平角,观测这个水平下角,再观测边长, 怎么样用我们王老师的这个垂修心意计算呢?我们用他这个数据,这组数据和王老师的软件,我们来现场,我们来实际来演算一下, 我们有一个已知点 a 是吧? b, 那我们就先把这个已知点 a 输在这里,坐标是输进来,我直接复制进来,六幺零零四零零,是吧?然后是 y, 坐标七八零零幺二零输在这里,然后下面我是有这一这二两个, 两个加密点,对一对二,两个加密点,然后再还有一个逼点,是吧?逼点的是有一直做标的,我们也把它复制进来,输在这里一直做标, 然后这中间说我们的官司数据,那这行一般我们是不管他的啊,不管他啊,主要是官司输入我们的官司的水平假假或者个凭据。呃,水平假假,他这里有个提示,就说 角度按都分秒的格式输入,比如说我们什么意思?就是我们这里比如说你关系的角度是一百六十度 二十五分四十一秒,那么就直接输入幺零六二五四幺,他这个输入呢,有这么多点,你输在哪一行呢?就是你是哪个策战,比如说这一的策战关系的水平讲,那你就输在这一行, 那我们这里就输多少,输入幺零六二五四幺幺零六点二五四幺,对吧?然后先把水平啊输完,输入最大的车站幺二三点四零二八,这是我模拟的一组数据啊, 幺二三点四零二八幺二三点四零二八, ok, 角都这样就说完了,因为我只有两个关系小吗?然后这是我们的关系边厂,关系边厂。这里来,比如说我们有可能是从 a 测的这一,然后这一测的 a 测的往返,那我这里呢,在这个网络上的程序里面呢,就直接输入这个往返关键边中速就可以了,是吧?那这里呢?他这里有个数,其实就说平均时表示商行与本行之间的水平距离。 注意第一个词是商行与本行,第二个是水平距离,首先要输入凭据,比如说我这里就是输入 a 一到 z 一的水平距离,是吧?商行 a 一到本行, a 到 z 一到本行的这个水平距离,那就是多少?幺五八点三四二,是吧?幺五八点 三十二。然后这个应该就是沙行与本卡,就是 z 到 z 二的水平距离, z 到 z 二幺三九点二九五幺三九点二九五,然后 z 二的 b, z 二的 b 幺二零点二三幺幺二零点二三幺, 是吧?然后这样子就说完了,说完了你最好再检查一下,然后再点倒行计算, ok, 他这里就已经计算完了,是吧?他这个你看他的点号,观测左脚 坐标方位角,是吧?凭据,然后坐标增量改正指改正数,这个模拟的数据精度都比较高啊,然后改正数计算的做标志, ok, 然后他这里呢,你选择的这个规范呢?是什么等级的,是吧?他这个还有一个判断标准,是吧?这个, 呃,比如说 x 的这个,嗯,这个这个坐标的增量外坐标的增量 x 比火车零点三毫米,外比火车零点一毫米。这里是没有防火小必火车的啊,因为这个是无定向导线,那么还有个导线,全场相对比火车 是这么多,然后规范是这么多,然后给你个判断是不是合格,然后判断的依据是什么,是吧?当然你这里可以把,如果是你不同的规范,你这里可以把它改掉,是吧?你这里可以文字修改吗?是吧?然后除此之外呢,你还可以剪辑这个绘制剪头是吧?绘制剪头, 灰指剪头,双灰指剪头。如果是没有显示的话,你就就双击一下,因为你的他是搞的这个屏里面, ok, 你看这个,嗯,这个整个倒行的不是头。哦,这,这是开始的那个了,开始那个了?我这个看不清啊, 开始的这个导线头他都可以直接挥出来,导线头应该是二零零七,我的二零零七到二零零六都是可以直接啊,直接用的,我把二零零七打开一下,好吧,二零零七 啊,这就是随机的,随机随机在这里。 哦,二零一六是吧,这个应该都是可允许的。然后再说一下啊,他这个玩的是个这个程序嘞,他是 wps, 如果你普通 wp s 是没有没办法用的,应该是需要安装这个啊,如果是 wps 需要安装这个红插线才可以,或者是有会员才可以。但是我们这个它主要是基于这个沃菲斯开发的啊,就一克赛尔开发的,一克赛尔这个全部都是免费的。那你如果是, 嗯,第一次使用未必的程序哈,你这里没有加载的红的话,那你需要怎么做呢?点击这个文件,再点击选项。我这是二零零七版的啊啊?二零一六,二零零二零零七,什么二零一零二零一三都可用,是吧?然后点击这个 新人新新人中心,再点击新人中心设置,然后再点红设置把,这个如果你点不开头,一般都是禁用红了啊,那你把这个启用红打开,然后点确定确定,然后再把这个保存一下,然后再关闭再打开,一般就可以了,是吧? 我们来试一下他这个, 哎,来他这个导型都绘制出来了,看到没有?就是绘制一下这个他直接绘制角度都给你标标出来了,是吧? c 一是吧,然后这个坐标你当然也是可以在这里插,是吧?坐标也可以插,然后就是这样 啊,同时呢为了验证他这个程序呢,我自己把这套数据呢,就是这套数据,我用科傻也算了一下,可以看一下这个科傻与他的一个结果的差异,可以看一下啊, 科啥?你看这个这一点的平常坐标是四九七点幺零二四九七点幺零幺,差了一毫米幺零幺五幺零幺五啊,这里是幺零二,差个零点五毫米 六六九点五零五五零五,我也不差啊,五七七五七七,不差,七三七点五八六七三九五八六, ok, 不差。 这个程序我是经过验证是可以使用的。哎,这个不是这个一个赛的表格啊,这个是没别的程序完了是使用这个代码写的, 这个一般打印出来就比较好,你这个也不限制你的多少点,你增加多少个点都可以,是吧?因为他这个是记得带吗?然后你可以输出这个剪头也会放到你的平常报告里面去,是比较比较好的啊,还有什么没有 啊?这个程序因为是网络,是花了呀,一天的时间单独开发出来的啊?啊?不免费,好吧,需要的私信不?免费,需要的私信。好, 这是全网,应该是老马是唯一王老师授权来发布这个软件的。好吧,后面也会对这个这个软件的这个使用输入方式 啊,包括不定向到现在官司的一些基本的方式会在号里面和协票文章大家可以去。呃,协票文章大家可以去看一下这种官司的基本的说明还要求顺序。还有这个啊。
1158测量老马 06:55查看AI文稿AI文稿
06:55查看AI文稿AI文稿今天给大家讲一下复合导线的内页计算吧,这是一个复合导线内页的一个计算表, 我们先看一下外页的一个贯彻的线构图,我们是一级导线,然后 a 点, b 点, c 点、 d 点,坐标是已知的,然后我们现在要求一号点和二号点的坐标, 然后我们外页观测得到了角 b 角,一角,二角 c 的角度,然后得到了 b 点到一点,一点到二点,二点到 c 点的句状题, 然后我们把这个外业观测的数据整理到表上,就是这样的,我们已知 ab 的坐标, cd 的坐标,然后我们用 ab 的坐标就可以推出 ab 的坐标,方位角和边长下面的也是一样的, 然后阴影的部分就是我们现场实测的,然后我们也看一下怎么计算。我们第一步先算坐标分柜角的 b 和叉 f beta, f beta 等于 实测的角度之和,剪掉 b、 n 的角度和 我们实测的角度和呢,就是一百四十二度五十七分五十秒,再加上一百五十五度两分三十四秒,然后加上下面这个,下面这两个求和,这四个求和求到下面 我们用计算器算一下,一百四十二度五十七分五十秒,加上一百五十五度 两分三十四秒,再加上两百一十九度二十四分一十六秒,再加上一百一十二度三十二分五十八秒。 我们的计算盒是六百二十九度五十七分三十八秒,往上写六百二十九度五十七分三十八秒,超向矮六百二十九度五十七分三十八秒。 我们用已经问的怎么算呢?已经问的就是用终点坐标方位角减掉气垫的坐标方位角,再减掉一百八十度乘以 n, 我们这里就是阿法 c、 d, 剪掉阿法 a、 b, 再加上一百八十度 乘以 n, 我们这里的 n 是四。我们先看一下后面就是四十五度十四分五十四秒,减掉一百三十五度十七分一十二秒,所以直接就是 七百二十度,我们可以看一下,用计算器算一下,四十五度 十四分二十四秒,减掉一百三十五度十七分十二秒,再加上一百八十度, 嗯,所以算得有问题吧,我们看一下幺三五幺七幺二, 哦,不对,不是加一百八十度,加一百八十度乘以四,我们是四盏嘛。 b、 e、 r、 c, 我们总的就是六百二十九度五十七分四十二秒,上面的超向矮是不变的,左边方位的角的闭合叉就是负四秒,然后我们这里是一级导线 坐标方位摇的笔和叉就是正负十倍,根号小按等于正负十倍,根号小四等于二十秒。 我们外也观测的角度是合格的,然后我们求一下每一站的角度的改正数, v 等于负的 f, 北塔 除以安安是四,我们这个是四站,是负的,负四秒除以四等于一一秒。我们这个就是要把每一站都加上一秒, 加一加一秒啊,加一加一,加一加一,所以是一百四十二度五十七分五十一秒,一百五十五度两分三十五秒, 两百一十九度二十四分一十七秒,一百一十二度三十二分五十九秒。这里算完之后,我们算一下坐标方位角,我们先以第一个为例,下面都是一样的,二、法 b, 一,我们先写公式, a 法 b 一等于 a 法 a, b, 加上角 b, 减掉一百八十度。 我们公式是怎么来的呢?一起推导一下。我们这个以阿法 a、 b 的坐标范围表也是一致的,这边是北方向,然后这边也是北方向,这个是阿法 b 一,阿法 b 一等于 b 一等于角 b, 剪掉前面这个角,前面这个角是怎么来的呢?就用一百八十度剪掉。二法 a、 b 减掉 f、 a、 b, 然后大家把上面整理一下,就是下面这个公式了,我们先算一个,推一个一百三十五度 十七分十二秒,加上一百四十二度五十七分五十一秒, 再减掉一百八十度。我们用计算器算一下,一百三十五度十七分一十二秒,加上一百四十二度 五十七分五十一秒。哦,五十一秒。氨基酸漆的时候一定要特别的注意,减掉一百八十度, 这里是九十八度十五分零三秒,那么往上写九十八度十五分零三秒, 大家可以自己算一下,因为制片我之前是算过的,然后我现在就直接往上抄,就是这个加这个,再减掉一百八, 这个天,这是七十三度十七分三十八秒, 这个是一百一十二度四十一分五十五秒。
3088测量员小郭 04:16查看AI文稿AI文稿
04:16查看AI文稿AI文稿大家好,我是何老师,今天给大家来讲一下复合导线平插计算表, 这是一个复合导线近视平插计算表格,我们导线的等级有三四等,一二三级五个等级。那么首先我们在这个表格的 黄色区域输入我们要平叉的导线等级,那假设这是一级啊,现在我们这个测量数,嗯,有六站,那么我们就输六,那么这里面的方位角的 b 和叉允许偏差值就可以计算出来,那就是一级,那就是十倍的刚好。恩啊,我们六战,所以他就是二十四秒, 我们在这里面输一下四等,看一下啊,四等,哎,看到没有输四等之后,就自动判别我们这里面的五倍的根号,嗯,那么是测量数是六站,那么这个方位角的 b 和叉允许值就是十二秒,那这个表呢?我们可以进行一个 闭合导线,也可以进行一个平常计算啊。我们前面讲了课程里面讲了闭合导线,他也就是我们的一个复合导线的一个特例,其实是一样的,对吧?也说明我们这个必点 他是又符合到这个必点上面去了,那就使我们必点与必点之间的那个作 要尽量这个就是为零啊,就为零。那么现在呢,我们这个表格,我编的表格是输入的是那个导线的左脚,那么怎么输入我们角度呢? 大家注意,这取消隐藏哈,由我分成了角度观测,分成了三列来进行输入,度分秒的输入啊, 将这个观测的左脚按照度分秒分别输完之后,我们再隐藏起来啊,隐藏起来,那么再来在这个绿色的区域输入我们的观测的那个边长,再将我们复合导线并 导线的四个已知控制点输入到这种表格里面去,那么我们这个表就可以自动计算出我们的方位角的角度。闭合插,坐标增量的闭合插,前长相对闭合插, 那么就可以判别你这符不符合规范要求,精度要求,对吧?符合我们就可以平差计算得出坐标增量改正后的值等等之类的,那么就将我们加密后的那个控制点 就的坐标我们就可以平插计算出来,那么这是有四个加密点对不对?那么如果我们要大于了四个一致控制点怎么办呢? 我们怎么插入啊?哎,大家就要注意在这里面插入啊,在这进行插入,框选就是这个坐标 一直坐标的这个地方啊,框选插入,哎,完了插入之后,我们记住了要框选 这个往下拉进行一个公式的覆盖啊,进行一个公式的覆盖,那么你们就可以在这里面输入了,如果行数 多了,那么我们也是一样的进行框选删除啊,框选进行一个删除啊。
410何足道 11:48查看AI文稿AI文稿
11:48查看AI文稿AI文稿欢迎大家收看工程测量大师之闭合导线教程。在平面控制测量中啊导线网是常用的啊布网方法,那么导线网呢,一般分为啊知导线啊,符合导线和闭合导线三种形式。那么我们这里呢讲一下闭合导线是怎么计算 闭合导线呢?是指从一个已知点出发,经过若干个测战以后又回到原点啊,原来这个已知点,那么他整个一个测量线路呢,也构成了一个闭合的多边形, 嗯,那么闭合导线的计算呢,他是要根据这个多边形的内角和啊他的内角和进行平插的,所以呢大家呢可以在工作中呢使用我的这个软件工人测量大师来计算闭合导线, 那软件呢,是同时支持安卓,苹果和 windows 三端的,所以呢,可以让你在外面啊观测的时候 啊,在手机上面啊,直接就记录下他的一个观测数据,然后呢点击计算就能直接出结果,出表格啊,做到了这个内外页的一个同步的进行,可以提高大家的工作效率。那我们这里呢啊就以一个 这个简单的闭合导线为算力,给大家讲解一下软件是如何使用的。好,那软件的闭合导线有两种模式啊,呃,一个是闭合导线一,还有一个是闭合导线二啊,这两种呢没有什么太大的差别,主要就是根据你已知点的数量啊来区分的, 那 b 和导线一呢,指的就是你只知道一个控制点的坐标,那么你在这个控制点 a 点驾车仪器的时候啊,你还需要观测一个方位角,就是图中的这个啊, a t 四就是他到他第一个未知点的这个 a, t 四 这条边的他的一个方位角,那么就是这里的一个九十八度零五分五十一秒,对吧?那么你要填在这个 a 点的这个阿法 a 啊,这样一个数据里面去啊,那 b 和导线二呢,指的是什么呢? b 和导线二啊,指的是你有两个椅子的控制点啊,这里我有一个 b 点和一个 a 点, 那么而且这两个点之间他是可以相互通视的,那么这个时候呢,你就需要观测一个在 a 点观测一个转折角,就是这个 ab 这条边到他 at 四这条边,他的一个假角啊,就图中红色的这个角度, 那个把它关注出来以后,然后把它填进去就可以了。那我们一般现场呢,用闭合导线二的情况比较多啊,如果大有条件的话,还是建议大家尽量用两个已知点的这个模式。那我们此处呢,就是以闭合导线二为算例啊,来输入一下数据, 那么在输入数据前,我们首先要设置一下计算参数啊,右上角啊,点击这个三个点按钮啊,这个设置按钮点完以后啊,我们可以先调整一下它的转折角啊,是左角还是右角啊?大家可以发现啊,这个图片里面可以发现啊,它的一个前进方向,它是一个顺时针的一个前进方向,对吧?那么它的 观测到的那个转折角,他都是位于前进方向的右侧啊,所以我们这里呢,就是把这个转折角啊调整为右角的模式。 然后呢我们再可以设置一下这个闭合叉啊,这个角度闭合叉和相对闭合叉啊,相对闭合叉呢,指的就是导线全长的相对闭合叉啊,他们呢是指的是就是你最后的一个 啊,他的一个呢龙水值啊,他的一个玉值,那么也是你可以根据你自己工程的要求啊,比方说你如果是工程测量规范里面的 一级导线,或者是公路勘察规范,城市测量规范等等啊,根据你规范里的要求啊,自己啊算一下啊,把这个预值填进去就可以了啊,他是用来 验证啊,这个最后的计算结果是否超限的,是不影响你的计算结果的啊,他只是用来验证你的结果是否超限,你后面自己整理资料资料的时候再去改也是没有关系的啊。 好,那下面呢我们就开始输入数据啊,好,首先呢我们先把这个点号改一下啊,我们可以发现他是从 b 点啊,为第一个点移植点,然后再到 a 点,所以我们第一个点的点号是 b 点,对吧?好,然后再把第二个点的点号也改一下啊,第二个点是 a 点啊, 然后我们输入下比点的这个坐标啊,那比点坐标的这边是啊,五百三十三点零八九啊,零八九米,然后是 九十三点三九八,白色标是九十三点三九八啊,然后呢这个转折角呢,指的就是这个啊,红色的这个啊, a 点的处的这样一个转折角,那么我们这里呢是填在 b 点处啊,那其实它是在 a 点观测出来的一个转折角啊,我 可能啊,这里软件可能做的时候有点瑕疵啊,尽量在笔点上面是填了,大家还是还是小心一点啊,那么这里填的也是二百三十八度啊,五十六分四十七秒啊,然后呢我们再点击到 a 点,那么先把再把 a 点的坐标输入一下啊,二百八十五点零二四啊,还有他的外坐标呢,是一百九十八点四七亿啊, 然后啊,我们输这个观测,开始输入观测值了,那么这个观测值呢,就是距离下下一点的边长,那么就是他的一个频距啊,就是他第二个,就第一个位置点的是 t 四,对吧?呃,那么他距离 七次点的一个边长是二百零六点四二二,然后他的转角角就是 a, 这里转角角指的是 a 点出一个转角角,那么就是啊,一百零五度是吧?啊,一百零二度啊,然后五十九分十二秒啊,这样好,我们 a 点输入完成以后,我们再转到啊下一个点,那么下一个点呢,他的点号是 t 四,我们把他点号改一下啊,改成 t 四,然后 t 四呢,距离他下一个未知点的边长是多少?是一百十五度啊,一百十五点二零二, 然后 t 四出的他的转折角呢是一百零八度啊,二十四分零六秒啊,这些呢,他都是一个观测值,对吧?好,后面呢就是 t 五点啊,点号也改一下啊,然后 t 五点的下,距离下点的边长是一百三十点二八三米,然后这个 t 五出的转折角是一百十三度 啊,五十五分二十四秒啊,这样子好,我们 t 五啊,这个数据输完以后,我们还要再新建一个侧战,对吧?就 t 六啊,我们按这个加号键新建个侧战啊,那么他点号就自动帮我们写输入成 t 六了啊, t 六点,他距离下点的面长呢是 一百八十八点啊,零三五啊,我们观测出来这个数据,然后他的七六处,他的转角角,我们测出来是一百十八度,对吧?三十五分零六秒, 然后我们再建一个侧战啊, t 七点,那么 t 七点呢,他的下点边长呢?是一百三十九点幺八八米,对吧?然后 转折角是九十六度啊,零五分啊,零零秒,比较巧,正好是零零秒。好,那么 a 点呢?呃,这边呢,也没有别的数据要出入了,所以 a 点这边就是为空啊,他的参数。好,我们数据输入 完成以后啊,那我们就可以点击计算出结果了啊,我们点击计算呃,在正式的计算前,他会询问你一下,呃,你所输入的转折角是否为闭合导线构成的多边形的内角, 那么我们这里呢,因为大家可以发现这条路线啊,他是测的都是这个整个多边形的一个内角,所以我们就点四为内角,那如果你也可以啊,去测他的一个外角,那么你点否就行了啊,我们就点四啊,四为内角 好,计算出来之后啊,这个结果就出来了,那么很可惜啊,大家可以发现啊,他的一个角度闭合叉啊,他爆红了啊,这个导线全长枪的闭合叉是满足要求的,但是他的角度闭合叉啊,他是超线的, 那么说明我们这次作业可能是有问题的啊,这个呢,就体现出了啊,我们这我这个软件的价值,对吧,就是你在外面,对吧,剪辑计算之后,一发现问题啊,马上就可以返工 测,对不对?好,然后呢,我们再点击这个右下角的放大镜按钮啊,这个点一下就可以啊,查看他整个一个详细的一个计算过程表啊,并且显示各个参数。那么如果你是电脑版的用户呢,你可以把这个 拖在他的边缘区域,把这个窗口显示的大一点,那么你就整个表格就都可以看到了啊,那么他的这个你观测出来管转折角啊,改正后的转折角,还有他的方位角,以及他修正的一个坐标的增量,包括他最终的一个坐标,他都会帮你显示出来啊,所有参数都反映出来 啊,那么这个结果就出来了。呃,另外呢,软件也支持啊,就是把这个计算的这个表格啊,输出为啊 word 的一个表格啊,大家供大家进行加工,那么大家呢,可以点击这个输出结果按钮, 那大家一定要注意啊,这个输出结果按钮啊,一定要在这个有表格的时候按啊,你在这个时候按啊,按输出结果,他是输出失败的啊,你必须要按计计算器,按完以后,那么 你是哪个状态下的表格,他就你点击这个输出结果按钮之后啊,他就帮你输出哪个状态下的表格,那比方说我们要输出这个详细 计算过程的这个详细表,对吧?那我们在这里啊点这个,这个时候点击输出结果好,点完以后呢啊,我们就可以他这个输出的这个文字啊,就已经复制到你设备的剪剪贴板里面了啊,那我们配合电脑端的小程序啊, svm cons, 对吧?我们打开 sm cons, 双击打开啊, 打开以后呢,我们把这个简贴版里的文字粘贴到啊这个 sbmcoms 的输入框里面,那么如果你是手机的话啊,你可以啊,利用这个微信的这个客 logo 端啊什么的,自己去传输下这个文字啊,想办法把它传输进去。好,然后我们点击这个一键输出按钮啊, 好,那么他的一个 word 的表格啊,就会输出出来啊,这个就输出出来了,包括他的一个呃,教验结果啊,也是展现出来了。 呃,那么软件呢,它整个一个啊,使用的方法就是可能也是比较简单的啊,最后呢,讲一下整个软件的一些注意事项, 那么当你在使用的时候啊,你需要输的不是度分秒格式的一个 角度,对吧?你需要输入的是实境制的,对吧?角度制,那么你可以把这个度分表开关关闭啊,关闭以后呢,然后你再对吧,你就输入的时候也是实境制,对吧?然后你点击计算啊,视为内角,那么他展示的也是一个 实实际制的角度的一个结果。嗯,另外呢,还有一些用户反应就是他在度分秒状态下,他们是呃分啊,分这个单位,对吧?他可能是还要再再有再要保留一位小数,那么这个时候你可以在度分秒开关打开的情况下,你再打开这个秒为小数的开关 啊。呃,你在这边再计算一下啊,那么他就会帮你显示出来分的后面一位小数的结果,包括你的坐标也是,你如果要输入四位小数的坐标,那么你把这个小数位啊可以调整为四位,那么他的坐标也会随之进行调整,计算结果也会随之进行调整。 还有个注意事项呢,就是大家可以啊,回到首页就是建议大家把这个自动保存开关打开,自动保存开关打开以后呢,才会为你储存你上一次操作的那个数据,那么如果你 有意外退出或者意外返回的一个情况,那么你再加载相应的子程序的话,他会询问你是否载入上一次编辑的数据,你点击确定,那么他就会把你上一次的数据载入载入进去。 另外呢,呃,大家可以发现啊,这个首页里面还有一个坐标轴的一个选项,那么我们这里呢,它是默认是采用中国的,默认的一个规矩,就是 x 轴是数字方向的,对吧? y 轴是水平方向的 啊,那么在中国呢,是这样的,但是在国外呢,大部分情况下都是 x 轴是水平方向, y 轴是数字方向,就是和数学里面的这个迪卡尔坐标器是一个规矩,对吧?啊,那么如果大家是做室外工程的话,也可以使用啊,也可以自己调整一下啊,那么到时候就是以 x y 就转制了,两个坐标轴就转制了。 好,那么本视频呢,就到此为止,那后面呢,还有三种啊,符合导线的一个教程,感兴趣的朋友可以看一下。
173结构大师工作室

猜你喜欢
最新视频
- 15.3万北大旺仔