发那科机器人gsd文件怎么获取
我们如何备份法拉克机器人的 gsg 文件出来,首先点击工具,然后切换设备,选择 tp 上的 usb, 也就是我视角器上的,这时候呢,点击备份,大家注意啊,我们选择通信配置这个地方,光标题过来,通信配置回车。

粉丝1.9万获赞12.5万
相关视频
 01:03查看AI文稿AI文稿
01:03查看AI文稿AI文稿在 a, b, b 机器人与 p, l, c 进行通讯的时候,需要一个 g, s, d 文件,那这个 g, s, d 文件如何获取呢?今天就来教大家一下。首先我们选择菜单,点击资源管理器,第一行是我们的一盘驱动器,那我们呢,也可以在摄像器的右下角去插入我们的 u 盘,插入之后它也会显示在第二行, 我们选择把它复制到我们的 u 盘里就好了。这里我们先找一下它的路径,选择第一个 u 盘驱动器,然后找到幺二零杠五,幺五二九幺的文件夹,双击进入,继续找到 p, r, o, d, u, c, t, s 的 文件夹进入。那到这里面呢,只有一个选项,就是我们的 robert w, a, r, e。 点击一下进入这里,我们要往下翻找,点击下滑键, 找到一个名为 u, t, i, l, i, t, y 的 文件夹,再次进入这里,找到最后一个 s, e, r, v, i, c, e 的 文件夹。点击一下进入这里,就已经找到我们熟悉的 g, s, d 文件了,不过呢,它有两个,一个是 g, s, d, 一个是 g, s, d, m, l。 我 们选择的是 m, l 这个文 件,这里一定要切记。现在之后最后面两个 g, s, d, m, l, v 二点三三, v, 二点三四,根据我们所需要的版本去选择对应的。
109高端人才-工业机器人培训 05:23
05:23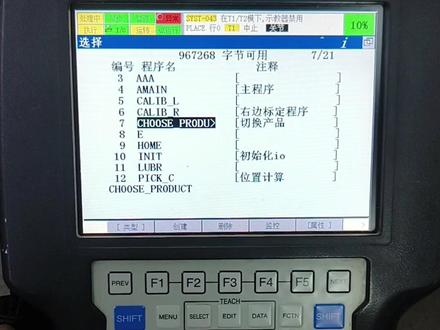 01:44查看AI文稿AI文稿
01:44查看AI文稿AI文稿快速学习法拉格集成程序。备份好,首先我们将适教器打到手动,打到手动以后我们按 menu, 这个时候我们按下按钮,找到第七个文件,往右找到第一个文件, 按 enter 键进入,进入完了以后,我们找到这里有个工具,我们按 f 五,按 f 五,我们点击一切换设备,好,切换设备,这个时候我们往右选择 t p 上的 usb, 也就是适教器上面的 usb, 就 在这个位置,我们这个时候点击 enter 好, 进入。进入以后我们按目录键查看一下子目录,这里是个小点,就是子目录,我们点击 enter 进去以后,我们看一下这里面文件是不是有你 u 盘里面的文件,说明你的 u 盘已经被读取了。好,这个时候我们点击创建工具,创建目录, 好,这个时候我们随便选一个 f 四 test 好, 创建成功,我们 enter 好, 这里就是我们刚建的这个 test 文文件夹,我们要把备份的备份到里面,这个时候我们按备份 f 四,我们备份所有以上所有文件,把 按 enter, 他 问你文件备份前删除 ut 一 test 吗?不要,我刚建的为什么要删除?按 f 否不要删除,将所有文件备份到 ut 一 test, 就是 我们刚建的文件夹。 f 四,四,好,这个时候我们等待一下,这里会显示 好,这个时候它正在显示备份,把所有的数据往这里面备份,这相当于是一个进度条,它备份成了三了,总共文件是一百七十五,好,我们等待它备份完全,好,这个时候它已经总共保存的备份完成了。按目录键可以查看目录,这个时候我们点击 f r 目录,我们继续选择这个小点,按 enter, 然后我们继续按上一层目录,选择 enter。 这里的 test 就是 我们刚才备份的巴拉克的程序文件,包括 i o 配置全部都在这里面,相当于已经到你 u 盘里面形成一个 test 文件夹了。下次我们如果机器人有问题,直接去调用这个 test 加载就可以了,这就是完整的巴拉克程序备份。
354自动化狙击手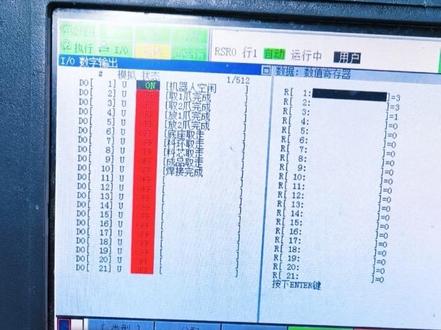 02:44查看AI文稿AI文稿
02:44查看AI文稿AI文稿这个作品给大家分享一下方纳哥机器人如何做 p n 通讯啊?咱们先点击菜单,然后找到 i o, 然后往右翻呢,有一个 preference 啊,进来以后呢,他这有两个频道,一个频一频道,一个二频道啊,一频道是做控制器,二频道是做 i o 设备,咱一般 plc 做控制器,然后这个就做 i o 设备了,所以说咱们这块要用频道二啊, 那么频道二这里呢要做一个什么设置呢?咱们按这个窗口键啊,给它切换过来,切到这面啊,咱们需要改一下它的这个名称,这个不是名称,这个 ip 地址啊, ip 地址要改,然后最下面这个名称也要改,这两个东西是非常关键的啊,这个通讯能充上不?充上就看这两个了啊。这个设置好以后呢,咱们再回到 刚才左面这个窗口,然后呢去下面去找这个 i o 设备,这里头,这里头需要做一个 d i, 一个 d o, 这就是和咱们这个 p l c 呢做数据交换的地址啊,咱们做是六十四个字节的 d i, 六十四个字节的 d o 啊,那么这面设置好以后呢, 然后再去做这个 i o 的 分配啊,咱们可以呢找到这个 i o, 然后找到这个数字这一项, 然后给它呢类型切换到咱们的这个数字,也是这个 d i 和 d o 啊,你看现在是 d o, 然后咱可以应用这个 excel, 这个给它切到 d i, 你 看这些就是我已经分配好的,那是怎么分配的呢?就点这个分配, 然后在这里呢可以切换 d i 和 d o, 它俩操作是一样的啊,咱们可以分配一段区域,然后呢关联这个幺零二号机架,幺零二号机架就是对应咱们 portnet 的 这个机架啊,然后叉槽一开始一,那这样式的话,那个 q 点呢?咱们 p l c 的 组态的 q 点呢?到时候就和这个幺这个 d i 一 就对上了啊, 然后这个也是一样,这块咱们设置的是幺零二号机架,然后一号槽开始一,那这样式,咱们这个 p l c 的 第一个 a 点呢,就和咱们的 d o 零 d o e 对 上了啊,那这时候分配好以后,下一步就到了咱们这个薄图这里了啊,薄图这里咱们首先呢是需要准备好这个呃 g i d 文件的,这个一般找供应商要一下就可以了,然后呢把咱们设备呢拖到咱们这个设备跟网络里,然后把它分配给咱们这个 plc, 然后双击进来以后呢,咱们这里呢需要分配一个这个传输区的啊,咱们这里呢传输区要对着和刚才对对应的去做,刚才是六十四个输入,六十四个输出嘛,那么这面就是六十四个输出,六十四个输入跟它呢对应上,那 i o d 指在这里啊,也就是咱们的这个 呃 q 九点零对应的就是那面的 d i 一 啊,咱们的 i 九点零对应的就是那面的这个 d i d q 一 啊,它的输出咱们的输入啊,咱们的输出它的输入啊,然后再就是它的属性里,它的属性里呢,需要把它的这个 这个 ip 地址和这个站的名称呢,要和咱们在基础上设置的一致,设置好以后呢,咱们连着这个参数啊,和这个程序一块下载进去,这就可以充上了啊。好的,学会双击支持一下。学技术找工作来建如。
 03:42查看AI文稿AI文稿
03:42查看AI文稿AI文稿很多同学们问说这个软件怎么用?我们来大概的看一看,首先我们打开的就是什么软件,叫 robo guide, 当然跟 java 相关的软件非常非常多,我可以带大家去翻一翻,像这些 全都是你安装了这个软件之后会弹出来一些东西,但我们常用的就只有一个叫 robo guide, 我 们打开就是这样的一个界面,我们打开它,这里面呢我们可以去选不同的一些选项, 比如说我们做搬运的,我们就用焊接拓,比如说我们做焊接的,做弧焊的,我们用 yl, 但我们这边用它默认的吧, 我们就用焊接拓,我们选择下一步,然后这里面呢我们可以去选择之前用过的一些工作来源,这个如果说你们刚开的话里面是什么都没有,我们一样的点击下一步选择新建。当然我们也可以用备份,比如说我们在项目现场的这个机器人,通过 u 盘备份回来的也可以用, 然后我们下一步,然后这里面我们可以选系统,在我们安装软件的时候,它可以安装几个不同的版本,比如说我这里面安装了比较几个经典的 七点七零、八点三零,或者说九点四零,九点四零是比较新的,当然现在最新的话是 v 十,我们点击下一步,这里面呢也是一样,我们选择它对应的工具包,有 l r handling two, 有 handling two 是 我们默认的就是搬运的,然后或者说我们用这个焊钳 叫 s p o t two, 或者说我们这个 c 型钳和 x 型钳可以去选,然后我们用最默认的一个吧叫 air handling tour, 然后我们选择稍后设置,到时候我们自己可以去添加一下它的爪子,然后点击下一步这里呢我们可以选机器人的型号,这里面有很多,比如说我们这边可以选常见一些的, 可以选一个两千 i c 十六 f, 两千系列的话,比如说 i c 就是 比较新的, i e 呢是最老的 i b, i 呢是中间的,我们选 i c, 然后一六五 f 就是 一百六十五公斤的负荷。我们下一步这里面是可以去添加我们的变位机,比如说我们的外部轴,比如说我们的站台, 或者说我们的地轨,都要选对应的变位机的型号,我们这边不选也下一步,然后这里面是我们的一些选项,有很多人说问刷选项怎么刷?比如说我要刷一个视觉的,比如说我要标定的,或者说我要去选择通讯的 c c link device net, 我 们都可以在这去选这个,我们下一期视频再讲哈, 来个坑我们下一步这样呢就是一个创建全部的一个界面,比如说我们这里选择什么样的语言,选了一些必须的选项,或者说我们选了什么样的系统,这边都能看得到。我们点击完成,然后这个时候会跑,如果说这里面有报错的话,大概率是你的 robo g 的 软件安装的有问题,建议卸载了重新装一下, 然后我们点击回车,这边也回车,回车,然后他那就会自己去加载,加载完了之后呢就会有一个界面, 这个界面里面就有我们的机器人,稍微等一下,第一次安装的时候呢,可能会比较久,因为我这个用了几次了,所以说还算比较快。好,这个就是我们的一个机器人的界面,这里面是我们机器人的一个模型,大家可以看一下,然后我们也可以通过按住鼠标的中键 进行拖拽,或者说按住左键右键,我们也可以对它进行一个旋转。然后这里面最重要的我们最常用的一个东西叫试教器,虚拟的一个试教器,在这边中间第二排第一个可以打开它, 这就是我们常见的一个是叫气的界面,该有的按键其实和真的机器人是一模一样的。所以说很多同学们说怎么自学,你可以下一个软件,自己去摸索摸索,自己去研究研究到底能不能学明白这些指令大概能不能看懂,我们都可以自己去写一写。今天我们就到这边下课。
113机器人—小地主 03:29查看AI文稿AI文稿
03:29查看AI文稿AI文稿设定好焊接信号以后,需要将焊接信号与弧焊系统参数相关联, 弧焊系统就会自动处理关联好的信号,如起护、重工等,这样就极大地提高了编程效率,并且系统在处理这些信号的时间控制上也更精准,所以焊接效果也会更好。 系统关联是在试教器的控制面板 process 页进行配置,列表中备注了中英文对照,供参考。我们需要在胡汉设备模拟量输出类型中,关联电压参考模拟量至焊接信号 a o y drape, 关联电流参考目击量至焊接信号 a o v drip。 在 胡汉设备数字量输出类型中,关联气体打个参数至 d o gas on, 关联起胡参数至 d o y 的 on, 关联宋斯参数至 d o f 的 on。 在 胡汉设备数字量输入类型中,关联起胡检测参数至 d i arc east。 上述焊接信号名称续与之前定义好的名称保持一致。接下来我们在仿真里打开虚拟试教器,演示一下设置的过程。 我们打开控制面板,进入配置这首主题,选择 process 主题。我们先设置一下模拟量输出,选择模拟量输出显示全部,点击编辑 这首。首先将电压藏考,选择模拟量 a o y rap, 再将电流藏考,选择 a o fade rap 好确定先不重启,后退,再来设置数字输出, 编辑 起弧信号,选择 d o y 档 送苏信号,选择 d o 非档, 切记保护开启信号 d o。 盖桑, 确定不重启,然后最后设置一下数字输入信号编辑, 然后起弧信号 d i r list 好,全部关联了,就可以重新启动了。
 01:31
01:31 01:22查看AI文稿AI文稿
01:22查看AI文稿AI文稿大家好,今天我给大家介绍一下法兰克机器人如何读取机器人的当前位置,找到指令,找到数值计算器,我们选择第一个赋值,比如说把当前位置推到 pr 一 里面。 好,然后呢?呃,一般乘以呢,有两个,一个是 l p u s, 一个 j p u s, 我 们先使用一下 l p u s, 好, 我们现在添加进去了,然后我们执行一下这个当前的指令, 单步我们看一下这个位置计数器。 pr 一 打开之后可以看到机器人的当前位置呢,呃,就是以 d 叉二坐标器的方式呢,存储到 pr 一 里面了。我们现在介绍另外一个指令,也是读取当前位置 啊,同样我们放到 pr 一 里面,这次呢我们选择 gpus, 我 们执行一下,好,执行结束,我们同样打开 pr 一 看一下里面的位置位置数据打开之后可以看到 pr 一 里面的值呢,是以机器人六个轴的一个轴角度的数值来存储。 好,这样话就是常用的这两条读取机器人当前位置的指令啊。 l p o s 是 以 delete 标签的方式来存储, j p o s 的 话是以机器人的主角度值来存储,我们可以在语句应用当中呢灵活去选择。
292中科罗伯特-老段 01:09查看AI文稿AI文稿
01:09查看AI文稿AI文稿大家好,今天我给大家介绍一下方耐克机器人的 t p 程序如何转换为 ls 格式的文件,通常呢法耐克机器人的 t p 程序呢?无法用这个电脑和手机来直接查看,如果说想查看的话,呃,需要我们转换为 ls 这样的格式,如果是真实的机器人的话,我们可以做一个啊, a s i 一 份,我们找到菜单, 然后呢点击文件,然后继续选择文件,这里呢选择工具,找到存储的一个路径啊,这里呢是一个软件,我们就放到这个 m i m c 这个存储卡里边,然后呢找到备份,这里面有一个 a s c i i 这样的一个格式的选项,我们选择这个, 然后点击所有法拉格记忆当中所有的 tt 文件,就以 ls 格式的方式批量的存储下来,我们找到刚才的存储路径 啊,在电脑里面是这样的一个查看方式啊,在真实的记忆当中不是这样的,你找到文档,然后找到我这个项目,找到 mc 这个文件, 这就是刚才我背会的所有的机器程序已经转化为 ls 格式的,然后我们随便打开一个程序,打开方式可以用记事本,这就是我们里面的所有代码了。
84中科罗伯特-老段










