信捷ddrva指令具体用法
信捷的 h c 五,这个相对定位和绝对定位是不能用同一个输出点的,嗯,我这里的话,我这里这个项目,我是,我用的,是我,我想我计划的是手动,我是用 d d, r v i, 然后控制这个轴,控制外力和外视,然后我自动的话是用的 d, d, r v a 绝对定位指令在这里,嗯,在最下面我看一下, 对,在这里。哎,控制那个自动定位,但是这里有个问题,它这个它不能同时用,不能 d d, r v i, 然后 y 零 y 四, d d r v a y 零 y 四,我们这里如果要同时用的话,我们要把 那写在写在 stl 里面,写在两个 stl 里面就可以了,这样子他就会,他就可以同时使用,然后也输出脉冲也没问题。我们要手动的时候我们就接通手动这个 stl, 要自动的时候我们就接通自动这个 stl。 嗯,这里大家需要注意一下 a x c 的啊, x d m 的应该是可以同时写。

粉丝2321获赞1.0万
相关视频
 02:12查看AI文稿AI文稿
02:12查看AI文稿AI文稿老铁们好,我是东莞工工人,今天我们讲一下四伏电机的绝对定位啊,就这个 d、 d r v a, 那和我们上次讲的相对定位,他们之间有什么区别呢?那如果我要从零走到 a, 那我们需要走一千个脉冲啊,然后呢?从 a 走到 b 呢? 如果你用相对定位,你继续走一千个脉冲啊,假如你要用绝对定位,那这个时候你需要走两千个脉冲, 而且从 b 走到 c 啊,如果我们用绝对定位,你需要走三千个脉冲, 三千。如果用相对定位呢?他还是走一千个脉冲啊,他们之间就这个区别,那相对和绝对,他们之间走位置的参考点不一样,绝对定位呢?他永远是以原 点位为参考的,也就是说,如果你走到 c 的位置,那从远点到 c, 一共有三千个脉冲,所以呢,你需要给他三千个脉冲才可以啊。如果你走到 b, 那零到 b 有两千个脉冲,所以你需要给他两千个脉冲, 而我们的相对地位呢?他永远是以当前位置啊,你当前是零的时候,你零走到 a 是一千个脉冲啊,那你走到 a 的时候呢?你当前位置从当前走到 b, 那你当前 a 到 b, 也就是一千个脉冲,对吧?所以他每次就是走一千个脉冲吗? 这就是他们之间的区别啊。好,现在我们来走一下,我们的师傅用的是绝对定位,往前走,再往前走,看一下我们的第一百九十二米的数据啊,他每次会啊增加一千,看到没有? 哎,这就是我们的一个绝对定位,他是以我们的原点为参考点的啊。那这个程序呢,和我们前面讲的相对定位写法是一模一样的,只是呢我们在点动前进与点动后退的时候稍微有点差别,我们前进的时候呢用的是单前值加上点动脉冲, 后退的时候呢,用的是单前值减去点动脉冲啊,我们可以看一下我们上面的视频啊,相对定位和这里呢就是有点区别啊,其他地方呢都是一模一样的啊。好,今天给大家就是一个绝对定位。
1060东莞工控人 07:44查看AI文稿AI文稿
07:44查看AI文稿AI文稿这节课讲一下相对定位。什么是相对定位?我们来先来了解一下相对定位与绝对定位。我们先看这个步径,走走走,他一直往同一个方向走 啊,我们看这个私服好,他走过去他还会走回来啊,他会来回走,来回走, 这样的啊,同一个方向走,我们适合用相对定位,他私服这样来回摆动,我们适合用绝对定位。 当然这两个指令啊,也不是啊,一定要这样用,但只是说啊,相对来说这样用会比较方便。那我们今天先讲一下相对定位。 绝对定位的话,我们以后讲这个四伏的时候啊,这是个四伏,我们以后讲四伏的时候再去讲绝对定位, 我们的相对定位就是这个 d d r v i 这个指令。我们这个指令里面有什么东西啊?有脉冲频率、脉冲口和方向,我们啊一个一个来分析。 首先我们的指令是 d d r v i 真写, 紧跟在后面的是这个 d 两百零四啊,是我们的脉定位,脉冲就是你给他多少脉冲他就会走多少啊,就是这个 d 两百零 次,我现在给的是一千六,就是啊,定位一次他走一千六百个脉冲就是这样子的 啊,后面这个 d 两百啊,是频率,就是我们的速度, d 两百是速度,我现在是啊,给的是六千,我们程序里面也是六千啊,我给他一万,哎啊,会快很多,看到没? 好,后面 y 零是我们发脉冲的端口啊,是我们 y 零,那我们驱动器接受脉冲的信号,接受这个 y 零的信号, 然后还有一个 y 四是我们的方向啊,通过 y 四我们可以控制附近的方向, 我们默认情况下,我们这个指令一旦驱动我们的 y 四,他是导通的,我们注意看这个 y 四的啊,现在是这个 off 的状态,当我们这个指令导通的时候,他也是会导通的, 看到没啊?看到这个啊,由 off 变成 on, 那指令完成它也就断开。那我们来写一遍这个指令,写一遍 啊,大概写一遍啊, d d r v i, 他会显示相对定位指令,后面是,呃,定位脉冲我们可以用啊,地址,第两百零四, 你也可以用其他的例子,或者直接给他一个长数。好,后面是第两百,你也可以用其他的第两百零几,第两百一都可以啊。然后是 y 零是我们的脉冲口,我们的附近,我们接收脉冲的时候啊,我们的线已经接在 y 零了。 好,然后是一个 y 四,是我们的啊,方向,我们的定位的方向啊,点确定啊,就可以了,就这么写的啊,就是这么写的。 我们写定位指令的时候啊,啊,前面是他的条件啊,这个条件是怎么来的?是我们按了一个屏幕上的启动,按了启动按钮这么来的。那我为什么要加一个八三四八 啊?就是为了防止我在启动过程中啊,启动过程中我如果再按启动他是无效的,要等我脉冲发完了,我才会启动下一次。主要是这个作用啊, 然后这个 m 八零二九,那我们前面已经讲了很多次了,我们一定要啊,跟在条件的后面下来, 那把前面的负位掉,那我们来讲一下这个方向我们如何去控制他的方向。我们现在啊是顺时针走的, 那我如果我需要他逆时针走,那怎么办啊?前面我们说了啊,把线接反就可以了,那我们通过程序,那怎么控制他啊? 逆时针呢?我们来把程序改一下。 好,我们把程序改好了,我们改了加了一条啊,我们 m 两百二十四,我们把 y 四给复位掉啊,就是我们 在发脉冲的过程中,我把这个方向复位掉,我不让他啊,我不让他接通,我们的方向就会反过来,我们来试一下啊,他就反过来了, 我们不加这一条的话啊,你一旦发脉冲它的 y 四就会导通, 那我加了这个就是不让他导通,我不让他导通,他就反着来,他就反着来啊,这就是我们一个方向的作用。 那我们这个指令啊,脉冲频率、脉冲口方向啊,这四个我们都已经理解了吧?相对定位还有一个重要的参数啊,就是单前值,我现在把单前值加进去, 我们把单前值啊显示到第一百八触摸屏上面, 我们相对定位是以当前值为参考,我当前值是这么多,我相对定位的时候定位一次,我就在这个数啊前面加,以前 我现在是二四幺六五零,我定位一次就会加一千,变成二四二六五零。定位是二四二六五零, 是以当前值为参考的。而我们后面讲啊,绝对定位的时候我们是以回原点的原点为 为参考值的,这一点我们啊现在了解一下,到时候我们讲绝对定位的时候啊,我们还会讲到以我们的原点为参考值。好,我们相对定位啊就讲到这。
452东莞工控人 02:38查看AI文稿AI文稿
02:38查看AI文稿AI文稿老铁们好,我是东莞工会人,今天我们来讲一下四伏电机的运行,如何写一个程序让四伏电机动起来,我们用一个相对定位,直立 d d r v i, 我们先来演示一下这个程序,哎,走走走,好,可以看一下我们的程序啊,正在动作,看到没有? 好,我们来讲解一下这么一个动作如何去运行的。好,刚才的动作呢,我们用到的是一个相对定位啊这个指令,那这个指令是如何执行的呢?我们先来分析一下这个程序线啊,首先我们刚才按的那个触摸屏的按钮啊,就是这个,那么一百三十四, 然后呢我们来置位一个 m, 两百三十四,用这个两百三十四去触发我们这个定位指令,一旦你触发他,他会啊如何去执行呢?我们来分析一下, 这个是他的啊,运行脉冲就是他每一次要走多少,在中国屏上我们设定的是三百,也就是说啊,他每次从当前位置,我们的相对定位,相对他,相对于谁来说的啊?相对于我们当前位置啊,你当前在哪里,对吧? 比如说我们啊,你当前在 a 的位置,你按一下这个按钮,哎,它会往前走三百个脉冲, 就会走到 b 的位置,对吧?如果你再按一下,他又会往前走三百个脉冲,就会走到 c, 你再按一下,他又会往前走三百个脉冲,就会走到 d, 就这样啊,一路一路往前走,咱们这个 d 两百一呢,它是一个频率,这个频率就是速度,就是你走 有多快,对吧?你从 a 走到 b, 走到 c 走到 d, 你走的啊,多快多慢,我们可以在触摸屏上啊,去设定我们的速度。 好,这个八零二九和八三二九,这两个是什么意思呢?啊?哎,这个八零二九是我们的定位完成, 这是个特殊的软元件,他会自动识别我们这个定位指令,你到底有没有完成这三百个脉冲,对吧?比如说你从 a 走到 b, 三百个脉冲你到底有没有走完?如果你走完了,他就会导通。 如果你没有走完,什么情况下没有走完?你碰到了极限位,对吧?你碰到了极限位以后,他可能就啊没有走完他就不走了,不走了就会八三二九,他就会通。啊,定位异常, 不管他们谁通了,我们都要把前面的啊,这个两百三十四把它复位掉。好,这就是我们的一个相对立位。
1650东莞工控人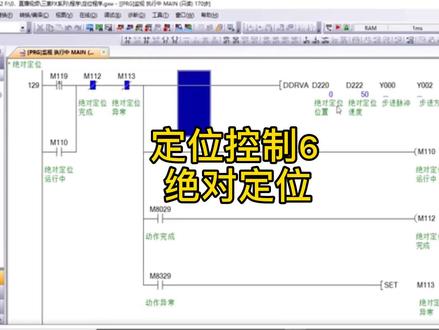 00:55查看AI文稿AI文稿
00:55查看AI文稿AI文稿我再看一下我们的绝对定位,那么这个 drv a 是我们绝对定位指令。哎,这个绝对定位的位置,绝对定位速度,我们来从方向我们一起接动一下,看一下 啊,看一下这个啊,这个运行现在就是绝对定位 啊,觉得定位我们的位置是零,看到没有啊?他就跑到零点的位置,位置。
 05:11查看AI文稿AI文稿
05:11查看AI文稿AI文稿我们一起看这个程序,这里有两条相对定位指令和一条扎恩延点回归指令。有些朋友说他使用相对定位指令的时候,师傅电动机他只能向一个方向转动。 我们看一下这一个程序,你可能碰到的问题就跟这里的相同。第一条相对定位指令 ddrvi, 他的脉冲个数是一个正数, 那么当这条指令执行的时候, y 四这一个端口就会接通。支付电动机是正向转动, y 零是脉冲输出端口,那么当下面的 x 零二接通下面这条 d、 d、 r、 v i 指令,它的脉冲 个数是一个负数,后面的 y 四端口他就会断开,他不能接通。这个时候的四伏电动机,他是反向转动。 我们看一下这个图, y 四端口,他接到的是师傅电动机的方向控制的这一个端口, y 零四脉冲发出端口,他是接到师傅电动机上的脉冲接收端口,制服启动器是台达 b 二。我们看这个程序,那么你要这个师傅电动机正向转动 y 四这个端口,就要接通 第一条相对定位指令的 y 四端口,他应该接通。第二条指令的 y 四端口他应该断开。下面的 x 四零三四原点回归接通以后, m 十就会置位,下面的 m 十敞开触点接通这一个 y 四还是方向输出端口,他就会接通, 那么延点回归,他就是正向转动,控制师傅电动机正向转动, k 两千是开始回归延点的速度, k 一千是爬行速度, x 零五是延点开关, y 零是脉冲输出单口。 当原点回归指令执行完的时候,下面的 m 八零二九接通 m 十会部位,那么这个 m 十就会断开原点回归指令,他就会给断开掉。我们把这个程序 写入 plc, 然后去实物上看一下这一个程序运行,他会出现一个什么问题。程序我们写到了三 u 的 plc 上,这是反转按钮,正转按钮点点回归, 这个是私服驱动器启动的按钮,我们现在已经把它打开,私服驱动器已经启动, 我们先按下反转的按钮,我们看一下师傅电动机是不是反向转动,滑台向左边移动。我们要特别看一下这个三六 plc 的 y 四输出端口是否接通。按一下反转按钮, 我们看到私服电动机是反向转动,滑台向左边移动, y 式端口没有接通,我们再看一下 ys 端口没有接通,所以这个师傅电动机反向转动,这个反转执行的是反向转动的相对定位指令,它是正确的。 然后我们再按一下正转的按钮,我们注意看一下 ys 端口是不是接通,师傅电动机有没有正向转动。 按下正转按钮,我们按下去之后,师傅电动机仍然是反向转动, y 四端口并不接通,如果 y 四端口不接通,那么四伏电动机它就是反向转动,这个时候这个正转按钮接通的相对定位指令,它的方向就不 不对。我们再看一下原点回归,按下原点回归以后,师傅电动机应该是正向转动, ys 端口接通,我们看一下,按下原点回归, y 是端口接通,师傅电动机正向转动,瓦台向右边移动,这个就是 x 零五远点开关,进入远点开关,马上减速 离开原点,快干停止,那么这里就是原点回归的位置,原点回归的动作正确,反向转动的动作也是正确, 正向转动的动作他就不对,这个正向转动的动作不对,主要是因为这个 y 四端口并没有 接通,所以这个师傅电动机他仍然是反向转动。那么这一个问题我们下一个视频就看一下怎么去解决它。
959知多工工控知识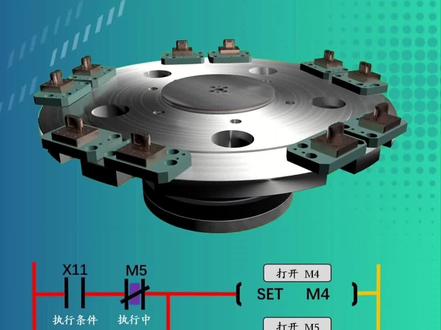 01:12查看AI文稿AI文稿
01:12查看AI文稿AI文稿大家好,上期视频我们学习了绝对定位 d r v a 指令,我们知道了绝对定位是参考零点执行动作的,如视感结构,其动作为线性移动,视感的长度呢,不可能是无限长,所移动的距离呢,都是有尽头的,也就是有形成限制, 那这种情况我们就可以参考零点执行想要移动的距离。那今天我们再来看看相对地位 d r v i 指令, 他和绝对定位书写格式大致相同,同样呢也是有四个操作数,但 d r v i 相对定位则是参考当前点执行动作。那么参考零点和参考当前点 在执行动作时会有什么样的差别呢?如视频中的旋转定位结构,多功位转盘设备,他的动作则是每次移动 相同距离且无限次转动。同样的角度,如果使用绝对定位,定位只会持续累加,所以这种情况呢,使用相对定位指令就更为简单。 假设相对定位在执行过程中被强制停止后再次执行时,你觉得会发生什么样的情况呢?
1396八方汇PLC编程培训 05:34查看AI文稿AI文稿
05:34查看AI文稿AI文稿迅捷 plcfb 的使用和封装,应粉丝的要求,给大家录制这个 fb 的使用视频。首先了解一下 fb 它能干嘛?我这是一个气缸的,报警的 fb, 可以实现一个重复调用,这是它的一个功能,就是重复调用。 这里再打开一个三十二轴的 f b 的封装,这个呢是一个三十二个轴的 f b 封装,可以看到 通过这种方式呢,可以实现一个轴一个快,这样的话可以实现重复调用,减少我们的一个工作量。 同时呢我这个也用到了结构体数组,为了方便大家理解啊,我现在从零开始教大家怎么封装 f b, 在哪个地方创建 f b 呢?找到左边有个 p o u, 新建 p o u, 给它起个名字,比如说 l 呀,面积选择 f b, 语言选择贴心图或者是语言, 这个地方是变量区,可以添加变量,输入变量,比如说半径啊,这是数据类型,可以选择,我们选择浮点数,给它一个注字叫做半径。 然后呢我们输出,输出,我们需要的是面积 s 面积, 再有一个中间变量,中间变量用 w 啊,这个类型用 w, 比如说我们是半径的平方 r 二 放进的平方 好,现在可以 l d s m 零符点数的乘法 e m u l r 乘以 r 等于 r 的平方, r 的平方乘以三点一四一五九,就圆周率等于面积 s。 这个 f b 呢就封装好了,封装好了以后我们保存一下啊,这里可以看到,然后调用的话,我们可以敲它的名字 area 回车啊,它会弹出来,弹出来这个框确定就可以了。这个地方我们输入变量啊,目前不能输计算器,只能输变量,比如说 r r e, 这是半径面积 s s e, 注意这个输的时候不要和系统继承性冲突了,我们可以复制粘贴啊,可以实现一个重复调动,把上面的改了,这个也改了, 可以发现我们改的时候他会弹出这个变量窗口,是变量的类型,变量的名字,然后放到这个全局变量表当中,他属于全局变量。 好,现在就搞好了,我们可以在全局变量表当中给他映射 我们 p l c 的地址, h d 零, h d 二, d 零 d 二。同时呢,我们可以这个变量表是可以导出的,导出到 excel 当中啊,可以编辑,也可以导入, 可以实现一些变量化的编程,不同工程当中可以使用。好,我们放大一点,然后把程序下进去看一下效果,下好了以后,我们可以改变它的值, 放进等于一,面积等于三点一四二三啊,就实现了我们要的功能。这个也是可以的, 同时呢,我们可以关闭这个 zce 列框啊,可以给它缩小一点, 可以打开这个自由监控,这里也可以缩小一点,这样的话下面这个就不用移来移去了,可以添加我们的 h d 零,它是一个浮点数监控两个。 添加 d 零,它是浮点数监控两个。 ok, 这里呢我们也可以实现一个更改,同时可以鼠标右键可以把它添加到自由监控,就能把这个变量也添加过来。好,我们改变这个变量 五,改成六,可以发现啊,这个六变成了六,这个也变成六,说明他们两个底层可能是通过指针来实现的,他们是操作一个同一个地址,这个也是可以的。 s 三改为三啊,这里呢?也变成三,改成六,这里也变成六,说明他们两个是通过指针啊。好,这个是一个简单演示,下节课我们讲解气缸 f b 的封装。
 04:06查看AI文稿AI文稿
04:06查看AI文稿AI文稿前面讲到我们增加一些这个方框,方框这个通道方框就扩展性很强哈,然后我们这个按钮的话呢,它其实,呃,它其实的话呢,它是跟这边的是一样的啊,只是说它是不同的形状外观而已哈, 然后设置也是一样的哈,这两个关还点动这里哈,然后这个护卫的话我们就是在这个操作,这边的话设置的一个选怂,他并不需要去置位或者取款哈,因为其实我就是取得他一个脉冲,脉冲去置位一些护卫一些东西哈, 然后底下这边的话是一个报警的哈,我们暂时的话,呃,就是说有三项报警哈,这个报警的话他会显示你具体哪个急停按下去了哈,然后我们在这个是画面跳转页哈,回主页他他这个的话就是跳转,你想跳转到哪个后面号, 比如说一号、二号、三号、七号啊,都可以跳转哈,然后我们这个这三号页哈,这个是刚刚我我是创建的哈,你可以想创业页面的话可以右击这边一个添加,添加完了以后你就会增加一个画面啊,这个画面的话我可以不用他哈, 然后我们跳转页哈,第四页哈,第五页、第六页都是我们的一个宣传哈,都是一个宣传,然后底下有一个都是跳转页,可以来回去切换哈,然后我们现在可以去模拟一下, 模拟的话是这个按钮哈,这个按钮离线模拟,模拟的话就是模拟真实透明屏的一个状况哈,他只是说不能通讯哈,我们先欢迎使用进入 这个啊开关啊,这点动自动切换啊,下面的文字也会改变哈颜色啊,这些都可以去改哈。 这个是取反的一个效果哈,取反的一个效果点两下,他就是循环这样子哈,然后复位的效果就是损失重的,你点一下,他只会导动一次。好接上一个视频,我们那个太恶心了,那个软件 只能两分钟,两分钟的哈,断断续续的,我们这边模拟模拟出来呢,是一个真实的画面,我们到这边的话是企业分厂,他是可以去切换,然后随时可以返回主页哈,返回主页,然后这边的话是继续浏览哈, 但他图片的这个占位置是挺大的哈。我们这个,呃,现在暂时的话,这个作品的话 是能够运行哈,应该是能够运行的哈。呃,我们现在先导一下哈,导一下程序,我们把线插一下,线我已经插上了。这边的话是一个模拟哈,这边是一个 呃。上载哈,上载的话是成显示器把程序下载到这个电脑里面哈。呃。但是很多都是上载不了的哈, 因为他很多人员的程序下载,他就是这个下载,他下载工程到显示器他是不支持上载的哈。 就是说如果我用这个下载进去,你想去把这个程序导出来是导不了的哈,除非是用这个哈完整下载啊,但是一般大家都是有一些保守哈,不会全部下进去哈。那我现在下下这个软件, 这个数据相对来说图,因为比图片比较多的话,他就是比较多哈,如果说你的程序或者说运行本来就比较慢,那你就不建议发很多图片哈。 好,这个是我们的一个呃,真实的一个触摸的一个情况哈,当然这边我点进去的话因为我现在没有插 plc, 他可能会卡在那里,通讯那里哈,我们就这边这边是内部的就没有关系啊,清晰度呢?还可以啊,勉强能够达到这个 效果啊。 啊,现在这暂时不能点哈,一点的话他就是通讯中哈啊,谢谢大家。
 10:35查看AI文稿AI文稿
10:35查看AI文稿AI文稿大家好,本节课讲解的内容是 plc 的 model bus 中心地址以及数据格式的说明, 该说明在各个系列 p l c。 它对应的基本指定片手册里有进行说明。首先先进入我们细节的官网下载这个手册网址是三 w 点,细节点 com x i n j e g 中间没有 i。 在服务与支持界面有个下载中心,点击 类别筛选,选择产品手册 p l c 就能看到我们需要的基本指令,编手册或者是输入关键词基本指令。以 x d 的基本指令是手册为例,由于时间问题,我已经下载到了桌面上 给大家看一下。 目前首测关于 modbas 通讯还有自由格式通讯这一块的通讯功能是在第六章,第六章里面六杠二就是 modbas 通讯的功能说明, 他的地址及数据格式在六杠二杠三和六杠二杠四里面。首先先讲解一下通讯地址,在六杠二杠三, 它有三个表格,第一个表格讲的是叉第一、叉第二、叉第三、叉咬一、叉咬三的 modbus 地址。表格里都列举了它相应的 modbus 的软元件的范围、个数以及十六金制地址,十金制地址。 第二个表格讲的是叉 d 五叉 d m, 叉 d c, 叉 d 五,一叉 d m e, 叉 l, 五叉 l 五 e, 叉 l m e 的 modbus 地址。最后一个表格讲的是叉 d h 的 modbus 地址。表格最后有相应的注意事项,大家看一下, 它是讲了上面标注的哪些范围是锻炼区域保存的,哪些是 flash 的区域。然后这些地址是用于 modbus rtu 和 modbuds ask 马加 modbuds 协议的, 像我们姓杰的 x y 这输入输出端子是八进制的,地址 走了,你写对应的地址的时候要注意,比如说 y 零,如果他的地址是十六禁止的六零零零零,那就写 h 六零零零, y 十的话,那是写的是 h 六零零八,并不是 h 六零幺零,所以说需要大家自己计算一下,注意一点。然后我们的 modbus 指令都是单字的十六位的指令,若是里面的操作数写对方的 modbux 地址的时候,它的地址实境值已经超过了单字有符号数的,有符号位计存器的最大值三二七六七的话,那就不能直接以实境值来进行表示, 不能使禁止地址不能写超过 k 三二七六七,那你可以用十六禁止进行表示 h 多少。这第七点是讲解了它的计算,大家可以参考看一下。 好,接下来讲解 modbus 通讯数据格式,在六杠二杠四,六杠二杠四里面, 它讲解它的传输模式有 rto 和 ask 码,一般用的 rto 比较多。然后我多给大家讲解看一下 我的 bus rto 同学数据格式,它有分为它的功能码,地址,计算器地址,然后内容各书之类的。 像我们的新杰,他列举出来的功能码有这么多,是表格里对应的不同的功能,他对应的功能码列举出来。其中需要注意点的是 有一个读书入线圈指令 impr, 这个是不能用于我们细节 plc 的,这个可以用其他的支持这个功能码的 重站,然后用指相应的功能码来控制它,然后下方列举了相应的功能码,它的那个豹纹的格式。 数据的格式,这个是以单个寄存器写为例,因为它是单个寄存器写,所以报文里面不需要再写它的那个数据的个数, 它上面讲的是尚未机对 p、 l、 c 的。第二这个地址写数据,十进制的五千或十六进制的一三八八, 他这个格式是以十六禁止字节来进行排列的。他的地址默认账号是一,那就写零一。公的码是单个计存器写,就写零六。地址是 是第二十六禁止地址是零零零二,那就写高低位,依次写零零零二。数据内容是五千十禁止的话那就十六,禁止的话那就是一三八八。输入一三八八交易码 后方是交易码,交易码的话,在我们的软件里面有个四函数功能库,里面有个计算交易码的四函数,大家可以看一下 三个计存器写为例,接下来我们看一下多个计存器写它的格式, 多个计算器是公的码一零,它的例子是对 p、 l、 c, 它的地理 这个地址为首的三个计算器进行写入他的通讯数据格式,也就是报文默认地址还是为一,他就写零一。如果你的那个通讯地址,也就是账号为二的话,那你就写零二, 按照你对应的实际的存在的通讯账号来进行书写。接下来就是他的功能码,功能码是幺零, 就一个字结一个字结的,然后是他的通讯,是他的计算器地址,对方的计算器地址重占 plc 地址是地,零十六禁止就是零零零零。依次输入 计算器个数是三个,那零零零三个字节个数,因为一个字一个计存 器,也就是一个字,一个字的话,它有两个字节,如果是三个寄存器,那就是六个字节,所以输入零六, 然后注意这是十六禁止的数据内容,就是你想要的数据内容进行输入,他就可以呃,在,比如说在调试助手里输入这些豹纹,然后进行发送,那你存在这些计算器就会被输入这些数据内容。 好,接下来介绍的是 modbus 阿斯特马通讯数据格式。 ask 码是指豹纹中的那个每个字节,它是以两个 ask 码字符进行发送的,比如说我的一个字节是零三,那它零 是一个 ask 码。三十一个 ask 码进行传送,需要找到对应的 ask 码对照表,零找到对应的字符,比如说零,它的 ask 码时进值值是多少,然后转成十六进值。 上面列举了它的相应的格式,需要输入它的起始符,账号功能代码数据,这是它的叫宴,然后结束符,它们写出了它是由多少个 s 个码进行组合, 这是它的功能码的表格。下面例句了,以单个计算器写为例,介绍它的数据格式,例子是尚未机,比如 说调试助手对 p、 l、 c 的第二进行数据输入,写实际日的五千起始符,然后是地址,地址是他的,他的通讯的账号 是默认还是零一,他上面没有写默认账号还是一的话,那就分别这是一个字节为零和一。 零以一个 ask 码进行传送,一为一个 ask 码进行传送,然后找到它对应的对照表,零和一,它对应的数值是多少, 给大家看一下,可以百度查找,或者是我们手册里也是有的。在四六杠三,这个是通讯最后的案例,里面列举了个表格,就是这个表格, ask 码对照表零对应的时径值是四十六, ask 码值是四十六,然后一对应的是四十九,那我们现在拿计算器给大家看一下它的十六禁止值是多少。 零对应的四十八,四十八,输入时禁止四十八,那它十六禁止就是三零,如果是一的话是四十九,它的十六禁止就是三十一。可以看一下三零和三一, 看到它分别以 s 根码进行传送,找到 它表格里的实禁止的值, ask 码值转成十六禁止,然后就是 三一二三零,三一后面也都是一样的,每个字节都是一都发送两个 ask 码进行传送, 然后数据格式比较的长,大家可以看一下。 好,本节课就讲到这里,谢谢大家。
- 10:45查看AI文稿AI文稿
大家好,本节课讲解的内容是 plc 下载程序的三种方式, 分为普通下载、加密下载和保密下载。普通下载是指程序下载到 p l c 里之后直接可以再上传出来。 加密下载是指需要设置密码,这时候程序下载到 p l c 里再上传是需要输入之前设置的密码,必须要记住之前设置的密码。加密下载是指下载到 p l c 里之后,程序是无法上传出来的,会提示程序不存在。 关于 p l c 的下载说明是在我们 x d x l x g 系列可编程控制器用户手册软件 片这个手册里有讲解到,这手册可以在我们官网的下载中心进行下载。首先先进入我们新杰的官网三 w 点,新杰点 com, 新杰是 x i n 接 e 接 e, 中间没有 i。 在网站首页上方有一个服务支持,点击里面的下载中心, 在下载中心页面可以选择类别,筛选产品手册 p l c 就能看到有一个叉 d 叉叉 g 系列用户手册软件片,或者是输入关键字查 大枣软件片, 点搜索也能看到。我已经将手册下载到桌面上了,打开给大家看一下, 在手册的四杠二有相应的说明。程序的上传下载重大控制下载是指软件里面有个 plc 操作里面就可以进行下载的操作, 下载的时候他会弹出一个对话框,提示当前用户程序占用百分比以及下载的绿色的 精度条,你可以计算当前程序占用空间。在 p l c 操作里面有一个计算程序占用空间,它会提示 下载完成之后,他会再次出现一个对话框,提示下载用户数据,这个是指,呃,你配置的配置的这些参数可以进行勾选,以并下载到 p l c 里面,如果这些数据没有进行配置,则不需要勾选,直接点确定即可。 我们的程序下载也有一些保密性的功能,比如说点击 plc 设置,里面有个下载设置,可以选择是否移除注视,还有 c 语言加密。接下来给大家操作演示看一下。打开我们的编程软件, 将 plc 和软件进行连接, each 好,连接好之后右下角会显示运行扫描周期,或者是蓝色的停止,红色的拖机两个字表示没有连接,上 载着是在有一个快捷键,绿色的下载箭头,还有上传或者是 plc 操作里面可以进行操作。接下来给大家演示一下。普通下载当前是空白程序,并没有进行编程,我先普通下载, 可以看到它会出现这对话框,提示停止 p l c g 下载,或者在线下载,或者取消下载。停止 p l c g 下载是指下载过程中会将 p l c 状态切换到停止状态,不运行程序 下载完成之后也是停止状态,需要你手动点击运行运行程序在线下载是指,嗯,下载过程中他也是运行的状态,下载完成也是运行状态,但是这个功能只针对于支持在线 下载的 plc, 普通的 plc 选择在线下载之后,虽然他会一直显示运行,然后不需要你下载,程序完成之后不需要你手动再点击运行,但是实际 plc 中途是会停止一下的, 得完完全全支持我们在线下载的功能的 p l c 才能完全的支持在线下载,我直接点击停止 p l c, 好,正在下载,他已经是停止状态,这边并没有什么他的标志, 现在 完成,我并没有进行这些参数的配置,我就不勾了,点确定好,现在完成了之后,我想点运行是可以的,让 plc 处于运行状态或停止状态之后,这程序可以再次上传出来,点击这个上传的按钮, 这个对话框提示是否保存,是指当前这个程序界面程序是否要保存,你要保存则直接点击试,它会出现那个路径,选择名称进行保存,我这边就不保存了, 然后打开我上传出来的程序, 好上传完成,点确定,这就可以上传出来了。刚刚介绍的是普通下载,接下来给大家介绍加密下载,先将 plc 跟软件进行连接, 连接好之后在 plc 设置有个密码,设置输入需要加密的密码,比如说六个一 尾数,六位数,然后这里有个高级,高级这边说了,下载程序需要先解密,如果是一万口令,这 p l c 将被锁,是指你勾选高级之后 下这场第一次能下载进去之后想想要再次将这个 plc 下载其他的程序,则需要输入这个设置的密码,如果忘记密码,则 plc 无法下载。程序正常使用,只能刷机, 刷机之后 plc 里面程序和数据会被清空,所以说程序和数据没被备份的话,那程序会被丢失, 我这里就不操不操作这个高级了,这密码是需要大家记住的。点确定,然后开始下载, 这边会显示六个红色的小点,告诉你当前时下载是加密或者是保密的状态, 点确定,这时候上传程序它会提示输入密码,如果密码输错,则解锁会失败,我输一个错误的密码,确定 是上传不出来的,点您记住当前的之前设置的密码,然后输进去输入正确的密码。 好,这个时候才能正常的上传出来, 当前这个界面程序我就不保存了, 好,上传完成。 刚刚给大家介绍的就是加密下载,还有一种是保密下载,给大家演示看一下我密码,先把它去掉,这次不选择加密了, 保密下载是直接点击这个带锁的绿色下下箭头表示保密下载到 plc 或者是 plc 操作里面也有, 先将 plc 和软件进行连接, 然后点击保密下载, 他也是有绿六个绿色,有六个红色的小点告诉你当前是加密或保密状态,这边就不选择 确定,这个时候他程序是上传不出来的,如果上传会提示程序不存在,大家看一下点上传,提示程序不存在,无法上传。 好,这个就是 p、 l、 c 的三种的下载方式以及上传,谢谢大家。
 02:25查看AI文稿AI文稿
02:25查看AI文稿AI文稿大家看一下,这个时候呢已经在下载这个程序了,有下载完成,那我们点开这样呢,我们来看一下这个这个文本实际的状况, 来看一下这个是我们当前我们把这个程序下载下去啊,文本里面显示的,我们显示的是哪个画面呢?是显示我们那个第一个画面,然后这样呢我们可以按这个加减键来切换这个画面, 再看一下,那都是我们刚才创建这个画面,那这样呢,我们再按一下,他又回到第一个画面,就说我们这个程序呢,下载下去以后,这个键的操作就是这样的,那如果我们这个按这个报警键啊,因为我们没有报警,所以他不显示啊,如果有这个报警画面的话,那么他这里会显示 这有一个淹死键,就是我们回到这个主画面啊,就是我们切换一下这个向下,然后呢我们按主画面 切换到我们第一页这个画面啊,这是一个设定值,这个设定值呢我们按下去以后,如果有值可以设定的,他会这个高亮显示,那么按一下,这就看一下,我们刚才这里是一个设置这个 d 幺零的值啊,这里呢我们可以改变这个值啊,比如说我们输入一个值, 输入一个这个,你比如说我们输入一个二十,这样呢我们按这个 ent 键,这个值就设定进来了, 来注意一下,这样呢我们就可以对他进行设定,首先这上面这个指示灯呢,这个指示灯,那么我们通过外部这个按钮啊,我们来控制一下,他是控制这个继电器,继电器是 y 零,我们看这里高不高亮显示啊?我们来确认一下, 来看一下这个灯已经点亮了,就我们继电器亮的同时呢,他也亮了,就这样一个显示,表示我们这个指示灯呢,这些都是没有问题啊,那我们还可以试一下 f r 是跳转到这个下面一个画面了,那我们看这 f r 按一下,看这个显示,来看一下已经跳转到这个画面了,那我们这里呢还按 f r, 他们,他又跳转到跳回刚才这个画面来看一下。你回到这个画面,那这个时候呢,我们要显示什么呢? 再操作一下 m 零,这个 m 零呢,我们把这个程序,因为我们改了一下,这个 m 零啊,它是一个群返按着下载完了以后显示这个当前画面,那么同样这样,我们为了显示,为了操作这个 m 零,这我们还是选这个。 com 八, 我们这里 m 零直线什么呢? m 零也是来实现这个 y 零的点亮,那我们这里新建这个插入一个圆键,我们把这个连上,这样呢? m 零闭。
 00:15查看AI文稿AI文稿
00:15查看AI文稿AI文稿有粉丝问有没有追检非检的案例,其实呢,现在直接有这个指令了,有一个追检填好参数直接就能用了,非检也是类似的。
 01:19:38
01:19:38


