epson四轴机器人编程教程
嗯,好,我们现在就讲编程啊,程序编写啊,机器人证据编写这一块的一些常用的程序结构指令 啊,首次常用的结构指令呢,就比如说跟程序的,就是跟程序的结构有关系的,比如说一个指程序的开头啊,程序的开头啊,一些循环啊,跳转啊、记 啊、选择啊之类的啊,挑战这些绝对是这些。那我们一个个来,一个是第一个是放生,跟放生呢,就是 以一个指程序的开头啊,程序的开头啊,行数名,这个叫行数,也是程序啊,行数名 在这个这个这个结尾呢,是他是搭配配套用的,翻个身搭配这个,呃, fen fend。 那比如我们新建一个项目, 像新建一个,嗯,有有一个好,新建一个, 新建一个呢,默认的发个声泪呢?这是默认的主程序吧?默认主程序,那假设说我们要 啊新建另一个其他此程序,比如说新建一个自动程序, oppo, vivo 啊, oppo 的就敲回车,这个呢就会自动弹下来了,然后这一个呢就是他的 呃程序了,这个呢只程序了, 然后接着呢,比如说那我们要用这个止疼器怎么办呢?就直接有一个洗液液了啊,一定要用这个止疼器就可以了。其实好,这个扣呢,后面会在讲,现在呢是先说一说这个怎么新建一个止疼器,就是一个放手 啊,发成家里的那个名称就可以了,这个名称呢是英文加这字符,比如说 opto 蛋黄线 ota 啊,可以,那这里就找不到了。那你这里再弄的时候是 ota 了啊,就是这样,中文就不行,不能说中文, 弄完之后我们塞进去好就可以了。好,我们下一个, 我们下一个,下一个呢是 dope, dope 是一个循环的指令啊,就是在这个度下面, 肉度和肉之间呢,它是一直在那里循环的,这是一个循环指令啊,都在那里循环指令。然后呢,你要跳出来呢,就有一个 exact 度啊, 就是扫到这个 etc 的时候呢,就直接跳出这个指令了。这个意思我们来试一下,比如说我们 有一个组成器,然后呢等等等等,裤子上贴一些其他的,把它弄起来啊,这些都是通用的啊。 好,我们来一个 这种新版本的软件呢,你敲第一个字母,他都会提示下一个,呃,后面的字,后面的字母啊,指定字母啊,比如说你看他有, 他会提示,现在都是提前提示啊,看你选择哪一个,这样可以给你看。但是一般你敲快的话就不用看了,直接敲,然后敲回去那个落就自动弹出来了。 block, 那我们比如说 blockfromprintprrng plump 破啊, plung 循环循环, 然后等待一秒钟,等待一秒钟。还有一个呢,就是判断一个条件,要让他退出来吗?你总不要让他退出来,那假设能看到一个十 e f s w 口号两五零啊,等于,哦,这是 e n exactly ex exit。 好, 然后有个度啊,这个时候呢,就退出来,跳,退出循环。 好,我们来验证一下这个功能。 好,这个一直在说,巡航和巡航中,说明他的程序是一直在这里巡航的,少了呢,我们可以打断点,打断点啊,藏到这里来了, 到这里来了。好,我们一路往下走,等到一秒钟啊,然后要下去 啊,循环中,这里老是就是每每次执行它的时候都会打打印一次,而另一者是打印的意思,打印,这里面的中文提示再打印一下啊,还要增加一个,然后呢,他就一直在这里循环,循环,循环 啊,把这个取消掉,定在这里循环,循环之后呢?当你这里不是有一个判断条件吗?当他输入信号十为二的时候就跳出循环。那我们看一下,当十等于二的时候, 嗯,这跳出喜欢了。哦,他是这样,他是直接跳出,不会再直行下一步,这一个应该是加到他前面, 那我们这样,这样才是, 这是学校。好,重来, 巡航中,巡航中,巡航中。好,然后把十点亮退出巡航啊,现在就已经退出巡航了啊,这里已经重新又重新开始了。 对,你说你开始的话这里是灰色的吧,一直有他的,一直是用的,他就一直退就行了。好,这一个就是这样用的。

粉丝1758获赞3642
相关视频
 07:52查看AI文稿AI文稿
07:52查看AI文稿AI文稿这一节的我们讲来讲个,我们之前介绍那么多,现在可以写一个程序来看看,先说一个简单的程序一般包含哪些东西? 呃,首先我们第一个呢组成其实肯定要有的,组成去再去调用,也可以直接在组成去上做也可以,简单的话呢,你可以在一个组成去上做几个动作,做验证,做试验,但是真正要做一个项目的时候呢,你就要做开始要做电做调用了, 用啊,比如说有初始化程序啊,或者说你的呃通信程序,或者说你的自动程序,手动程序,这些呢都要根据自己的需求来做调用 啊,吊用的话呢,我们用一个指令叫 ciala 啊,这个 caa 后吊用初始化程序啊, 吊用他,这样就可以了,根据自己的实际需求来。然后呢我们先看看,如果是普通的做验证的,不是项目上的,我们就可以直接说啊来做一下,简单的看看需要包括哪些东西, 有的呢,如果你有用到变量呢,就要声明一下变量,看一下哈,如果有用到变量的就是要声明变量,那变量在这里声明在上面啊,上面声明啊, 变量啊,整数整数变量,整数变量,然后翻转啊,就这样做变量,这样变量生灵。如果只是减 简单的做一个,比如说我做一个模拟,做一个项目的节拍模拟啊,这个动作模拟啊,那我们就直接写就可以了。然后首先呢我们有一个主函数吧,这个主函数这是必须要有的,或者是一个指函数都可以根据自己需求来。弄完之后呢我们就上电, 要上电哈,上电之后呢,我们就放他们这个把他刹车给送上,刹车有点爽了,然后呢功率呢?功率更自己需求来够了,这种高功率和低功率, 接下来就设置他的速度了,速度设置完之后呢,那我们啊要回到安全位吗?正常来讲我们都回到安全位的哈,就相当于说实话一样,这个呢是根据自己需求来好,然后接下来就是进入我们的动作阶段,那动 工作的话就是要做计时的,做节拍的计时,比如说有个汤驴赛的这样一个计时器,汤驴赛的是把计时器零把它清零 啊,然后呢在最后用一个 point 加一些中文注视到底是属于什么样的动作时间,然后呢, tm 啊,括号, tm 呢是计时器的记里面的一个时间计算,从这里 从这一行执行之后清零之后一直执行,执行,执行到这里执行完了再来执行这一个所需要的时间。 t 零啊, tmtma 括号里就对着这个,一就对着这个,所以呢很方便的可以计算出,可以看到每个动作,每个节,每个动作的时间 是多少,还有一个整体时间是多少。那我们对运行看一下啊,还有一个我们一般都是加入都落这样的一个循环镜来买 啊,加一个比方进来 就是让他一直巡航着走,一直巡航着。 好,我们执行看一下,执行了,你看这里有你所有的时间都会弄出来, 这样就比较完整了,比如从渠道到渠道位到上方增添他这叫运行的, 就是这样吧,就是点位呢,自己根据实际的点位能模拟吗?比如说我们是先从取位上方到取料位置取料,取完料呢就上来, 上来吧,上来了要去到过路位啊,要去到放撩位啊这些啊,主要就是这些动作,然后呢上次动作他所需要的节拍 就可以预估,大概机器人在这个设备上的是那个节拍是多少吗?就是相差不会多少的,因为,呃,你现场那边呢?现场那边呢,还要加入你的重量, 重量也要加进去哈,中奖在这里。对,正常的话你重重量也要加进去,重量在这里设, 是吗?在管理器这里还有个重量啊,设置,看看你的家具加你的产品重量是多少,跟你的,你设置了重量之后呢,跟你的速度是有关系的,重量越大速度就越大,哎,越越低吧。 好,然后这个呢,就是主要的流程,就是有在主程序那里呢,呃, 把电机上电,然后刹车功率,功率高低功率啊,速度设置啊,然后接下来就是动作逻辑,还有就是你的时间节拍的计算,主要就是这些了, 正常一个呢都是会有,有一个,比如说你有一个完整的项目啊, 就是要回初始化,先调用一下初始化啊,调用一下初始化,在这里这里调用初始化,调用初始化, 调用梳子画之后呢,再去调用调用你的自动程序,比如说我们刚刚这个托盘是自动程序,那我们就调用他,让他一直走,一直行为一直走,就是这样 啊,出此话之后呢,你要改速度吧,那你可以说,呃,到这里来,再来调用那个你要执行的自动程序, 嗯,初始化啊,先初始化,它是执行一遍初始化,因为初始化里面呢是没有循环,这里面 循环的,这里也可以把要把循环取消掉,说实话不需要循环,就是的话你只要一次就可以了,就是这样功率低啊,功率低功率低,说实话一般功率都很低的,要把它设置低一点 啊,然后你再去执行各种各样的要求,这样就可以了,出手的话之后呢再切换啊,切换你的高低功率的速度,切换完成之后呢,再去执行你的自动程序,这样就是大概的逻辑就是这样, 如果你中间有遇到一个需要用到变量的呢,那就要先定义变量才能用啊,这个变量可以定义的啊,到底是什么样的数据类型 啊,整数啊,福田数啊,字数串啊这些啊,都是根据自己的需求来 好,这样就是一个简单程序的一个一个边线啊。还有一个逻辑就是这样的,主程序,电机刹车,功率,速度设置,然后运行里的主程序就是这样一个逻辑。 有需要上节拍的呢,就可以加入这些节拍的功能啊,上节拍的指令,这就可以了。
165Frank-Li 11:22查看AI文稿AI文稿
11:22查看AI文稿AI文稿然后程序分为两个部分,一部分是接收,一部分是发送,然后定义全局变量, 在程序中要用三个, 这是三个是病型的,然后这程序的跑点位, p 一点位, p 二点位,然后我们首先先看一下 dcpip 二零一 tcpip, 然后这个是设置端口号,设置 ip 地址,然后这个是在这里啊,我们看一下 起身,然后这款 tcpip, 然后首先我们看一下二零一啊二零一端口,然后这二二零一的 ft, 这如果是我们不设这个也没关系,这一行数据会自动把它写入进去, 我们除了二零一,然后也用到了二幺零, 然后再看其他的,其他的没折的话就是空的二零一二幺零, 然后这是我们定义的一个名词,然后它的作用就是说 当端口号小于二零一的时候,他会重新执行,小于二零一的时候他会沟通重新返回到这里,再继续执行。 端口号小于一是什么意思呢?就是端口味打开, 然后没确定链接,但富二十又其他任务使用端口得三,就是未打开端口失败了,他就返回去,然后 这是设置机器人作为服务器, 然后设置他的 ip 地址,然后他作为服务器,就是说他是发送端,可以 像多多的用户可以发送数据,然后这个打印贴 tcpip 正在连接,正在端口连接成功,如果连连接成功,他就往下跑,打印连接成功,然后这是这里是个循环, 然后等待个一秒钟,然后去判断这个端口是否可以发送数据,如果是他大鱼了,然后就继续往下执行,如果小鱼他就跳到这了,跳出机会,他如果大鱼了,然后我们再看这个,这个就说定义内存中的零, 他是什么意思呢?他是和我们上面的数据相关的,你看我们上面数据啊,这个这两个数据就是在这里, 因为我们刚刚在病情条件中也也有这一段嘛。然后定义这个名称是什么啊?把这个数据复制给他,也是个令人疫苗。这个就是把机器人的当前指 x、 y 这然后付给他,最后一个内存值等于零,就是当当他 等于一的时候,然后他接通,接通了以后,然后我们接这一段,我们加了一个端口八,输出端口八,他等一的时候,他发送一次数据,如果 等于零,他就不发送,我为什么要加一个这个?如果是不加这个,他就会一直发送,一直发送,一直发送,我们就看不出效果,所以我们说触发他让他发送 一次,然后他就发送一次,然后到这他就把它奥普掉。我们来看一下,我们打开 tcpip, 我们看一下,他作为服务器,我们这边就要创建一个客户机,然后创建,然后我们只需要输入端口就好了。八千的端口创建完,他已经一直在坚定,当他啥时候结束呢?当我们 启用了以后,然后这个 tcpip 就连接成功了,当我们打开监视,我们看一下,然后输一次,当老爸的他自动就复会掉。你看 发送了两个数据吗?发送了一个这个,发送了一个这个数据,然后发送之后我们在这里看机器人的数据,这是机器人的坐标, 他发送呢,就是这个数据和这个数据打印就是发送成功,打印到这里发送的数据是哪来的呢?就是机器人上一集数据和坐标, 我再试一下,又发生一次,数据又发生一次, 然后我们看一下,我如果当暂停的时候也没关系,机器人停到那里了,他就不跑了,不跑了以后,然后我们发送两次,先发送一次数据,然后这是哎,这机器人发送在上一的数据,然后这 是坐标,我们再发送一次,又发送了一次,这个又发送了一次坐标,你看我暂停的时候,机器人的坐标是相等的。 好,我们现在再看一下 作为客户期,作作为客户期只需要这两个程序就好。客户期的话,你看我们下面这一个, 这一条就是客户机,就是你只接收上位机给他发送数据,然后只写这一条,你发送读取,就说机器人你 给尚未机发送数据,只用上了两天,就如果是你同时既接受也发送,就两端都写。我们来看一下这个给定义一个变量名,也就是我们要接收的变量名称,然后在这里也能减减空档, 然后这个就是机器人作为客户机,然后他可以给多个电脑发送指令,然后机器人可以设置 ip 机制,然后这打开端口二幺零的链接,然后这打印连接成功, 点击成功了以后,然后他就进入这个循环,这个循环就是在显示这啊,这定义一个变量名,然后这定义一个,如果是当他 异常的时候,然后他就会返回到这里重新执行。 当他想当这个,我们现在这个指定,就是把这个端口的这个数据复制给他,然后通过他小于零去判断连接异常了,连接异常,然后他就, 然后我们打开二幺零的网络端口,连接成功。 如果是二幺零等于零,等于零的时候,然后他就返回到上面 指令继续直行这段,如果当他大于零,二幺零的指大于零,就说明连接成功了吗?连接成功他就一直读取 上面一集发给他的数据,然后这个含这个变量就是接收他的长度,哎,打印接收来的数据,打印接收的长度, 打印接受的长度。以后啊,我们在 在服务器上面创建 ap 地址,刚才那个要 ip 地址就是幺二七点零点零 点二,然后端口号是八千零二,然后创建连接,创建连接以后他没有连接成功,我们现在连接他也连接不成功,哎,端口号为福仪,只有当机器人运行起来以后, 然后他才能在这建立这个连接,然后我们才可以连接。连接成功了以后他们俩通讯成功了,我再看一下,这会 连接成功了,如果是我断开的,哎,数据连接一成,再连接就连接 ok 了,好,然后我在这发送 你,好,然后发了个数据,哎,我看你好,然后隔了一个再发 发送你,好,哎,我们看为什么中间隔了一格呢?请大家想一下,再给你演示一下另外一个, 为什么这就没有跨行呢?给大家解释一下,如果你打了你好,然后你回车让他空了一个,他会把空的这一格,然后也会发送过去, 我扣两格,扣一号,再扣一号, 好啊,还不是接触到数据, 好的,拜拜。
451繁星 06:18查看AI文稿AI文稿
06:18查看AI文稿AI文稿啊,我们接着讲机器人管理器里面的其他功能,一个附近视角,附近视角是常用的,就是我们平时要试交一些点位啊,都是在这里 啊,布丁饲料画面,我们先说一下,一个呢是这看左边,这里有个模式,模式是默认这个世界的,然后 logo 番茄,番茄的话呢就是你看是 呃点击他的时候呢,他可以说单关节的运动,默认呢就是默认就是 x、 y、 j, 一如这样连轴运动,多轴联动的,然后速度就是你手动移动的时候,他速度高低, 目前位置目前位置,目前位置是显示当前是什么位置吗?然后这个世界呢?就是呃,多少毫米啊?中端那里啊,或者是 关节是每个关节,还有就是每个关节的电机的编码器的脉冲是多少啊?当前脉冲是多少?关节角度,还有他当前位置这个的,然后这里呢是看看当前手的方向,手臂的方向,手臂的方向呢?我们是分左右手吗? 左右手就相当于我们人人的左右手,他是什么样的姿势,就是左还是右了,然后这个是步进,如果选择连续动作,我们按住他, 他就一直按住他,他就一直一直下降,一直下降。如果我们选择这个长距离、短距离啊,中距离、短距离,我们就点一下,他动一下,点一下就动一下,动的距离是多少呢?就看看我们这里设置的是多少, 比如说我们是设置的是二十,这是可以改的,那你点一下 x, 那就是走二十,二十这样走是这个意思 啊,下面下面有一个试教点和执行运动,那我们比如说我们这里有个试教点,试教点的话在这里呢,是我们把当前位置试教到哪个点,自己可以选择,比如说我们把它试教到零点,批零 点一下准备是叫点。是啊,那我们就点标签了,标签,比如说我们是安全位,安全位 啊,这里呢是只能出现英文和制服描述呢,是可以出现中文的安全位,安全位位啊,点击确 就可以了。然后呢我们要执行运动呢?是比如说我们试教完成之后呢,我们会试教其他点,试试完成之后呢,我们想移到这个点位,这里呢,我们可以在这里。正常呢,我们是用上的懦夫, 够啊,这几个指令呢,我们到时候会细讲的,他只是一个不同的动作轨迹而已。 比如说这样呢,他就是,呃,先升上来,先升上来,再再平移,再下架,然后够呢,他就是,呃,从这个点到这个点,就是啊,走弧度直接平移过去了。 然后呢木服呢?就是走直线的 a 到 b, 就这样,就是走过去。主要就是这几个啊,然后我们点直行, 点直行就可以了,继续继续就可以了啊,继续就可以了。然后我们试教保存之后呢,这个点呢,我们可以再点数据,这里可以查看。 这个是我们刚刚批零啊,正好我们试下保存的。呃,这是我们刚刚说的标签,这个是 yju 当前的。呃呃,保存的坐标到底是多少 啊?还有他手势的本地坐标,还有就是他的安全位,就是我们中文的描述啊,我们可以在这里, 如果我们要修改点位数据,那怎么修改呢?可以在这里,比如说我们移动,移动 xyju, 然后重新选择对应的点,然后再点击试 保存,也可以在点位数据这里直接改啊,直接改,改完了这里点个保存 就可以了,然后呢直接写进去,穿着便携入 好写进去就可以了。这里我们是可以看状态栏了吗?状态栏啊,状态栏在这里,对了,这是我们刚刚做的状态栏了,就是写进去他就他就掉出来了,再再来试一下, 来试一下啊,保存,保存的时候呢,他执行了这个动作,直接传送这个了,就说明他点位已经写进去了啊。最好的是我们在创在创业编写的一下,直接在显示,这是在 保险的,就把你最新的点位表的信息把它传送到控制器那里,然后点位表,我们的点位表是有九百九十九个点位是可以用的,如果你觉得还是不够用,或者说你想, 呃,不同产品不同的型号,我们再想添加点一点是可以的。在机器人点公共啊,这里是可以添加的,比如说我在新建一个 logo, 型号二,型号二,型号二啊,这个是可以的啊, 啊,这有型号二也是一样的,有九百九十九个点位,那你如果要切换型号啊,程序是完全一模一样的,只是说他的点位是数字啊,点位的, 呃,位置是不一样的,但是点位的数量是一模一样的,那你只要切换点位就可以了,程序是不用切换,也不用说再去下载一个新程序啊,不用在程序里面就看不到,然后切换点位表,你的型号,这个对应切换到了啊,这一个讲的就是 机器人管理器里面的附近试驾和点位数据的使用和编辑。
625Frank-Li 05:26查看AI文稿AI文稿
05:26查看AI文稿AI文稿然后我们接着讲机器人的一些速度设置,速度设置分两个,一个是 ptp 指令,比如说帐构啊这些的速度设置,还有一些 cb 指令啊,比如说我们刚刚想的呃木斧这些指令啊, 就是要用那个 sb 这些。好,我们先讲第一个 pdp 指定的设速度设定, 呃,我们速度呢,用是 b 的加速度呢,用呃 acaccea 了啊,这是他的加加速度,减速度打开速度 范围呢是百分之一到百分之一百。然后呢,比如说我们如果是变得八十呢,他就整体了,如果我们后面加了 三十四十呢,就是对他的第三轴的上升速度跟下降速度对额外的设定,那他的加速度减速度也是一样啊,加减速,比如说 ab 就是整体的加减速, 那 cd 音乐服了,如果你再加进去了之后呢,就是对第三轴的加进去是额外的设置。 cp 指定呢,就是后面加了一个 sbsacs 啊,但是呢它的范围啊是比较大的,不一样的, 他的这一个呢,是不同型号的设置范围是不一样。比如说我们常用的 lsss 系列,他就是两千,最最大是两千。 然后呢他的加减速呢,就是两万五,呃,两百的呢,他就是二十公斤的呢,他就是也是两千,但是他加减速就比较慢了,大概就一万啊,这一个呢,这个就是根据自己现场的机型来做相应的设定。 然后接下来是一个电源设置,就是我们电源模式设置啊,比如说我们啊,啊,不是这功率啊,功率的设置到底是高还是低,低功率还是高功率,就相当于 我们切换了,切换高低功率了,如果要高功率的话,就是在呃程序上直接把它切换成抛而害,抛而漏这些指令就可以了。 低功率的话呢,就是默认的低功率模式时,他的速度就是默认放回来,大概是百分之十,百分之五左右这样的速度来运行。一般初始化的时候呢,是可以拿来用的啊,啊, waiter 指令, waiter 呢是重量设置,就是你的手部设置, 第一个呢是可以在这个机械管理器这里有一个重量设置 啊,这里可以设置。还有一个呢是直接在程序里面写位的,加多少重量,就像是这样啊,位的这样一公斤就一公斤,设置多少他就是数字,不是多少,是这个意思, 是这个意思好一些,基本指定我们就是这些。 然后呢我们最后讲一个设置啊,就是比如说我们只是用站的时候啊,我们平时呢都是直接啊站到上面来,然后呢回到零点再平移吗? 但是呢我们为了提高效率啊,就是我们可以不上升到零点,再便宜,我们直接啊上升到我们设置想要的位置,然后呢再走弧度过,过到零点, 然后呢再平移,平移到差不多的位置呢,我们再走幅度下来,是这个意思,而不是说像之前那样的, 像之前这样,这样是直直上来,上到零点再平移,这样的话就会效率方面就没那么好了。那我们优化一点的呢,就可以在这里直直上来, 上到一定高度,再再走弧度去到零,再平移,再走弧度再直直下来,这样的话就很好,那我们是可以这样,比如说占 p c 零, c c 二、 c 三,我们可以到 c 六啊, 比如说我们上升多少? a 就是上升 a 的高度,然后再从五度下降了,就是呃,到最后 末端往上抬低的高度的时候呢,就平移到这样的高度,再低的距离这个高度达到了之后再直接下降,下降来是这个意思 啊,这个是设置,设置 aics, 是设置,设置这个 a 和 b, 他的 人物呢?他的值到底是多少?然后呢?我们拿出来用了,就直接这样批,然后吸多少多少多少,吸零,就是以这样的值来种了,是这个意思。这个呢可以用于优化我们的那个 ct, 就是效率啊,提高效率主要是现场没有干涉就没问题,会提高一些效率。
95Frank-Li 01:52查看AI文稿AI文稿
01:52查看AI文稿AI文稿字,点击导入,这个导入就可以把我们啊,个人电脑或者控制器啊等等的程序啊,可以可以导入进来,那这里我们需要就是说我们可以把选择控制器,就是把控制器当中已经有的程序,我们可以导入到我们的电脑啊,导入导入到我们的电脑当中, 然后我们可以在电脑当中啊,打开这个程序,进行相应的一个编辑或者备份,然后选择控制器下一个,这里可以选择啊对程序的命名, 然后可以选择需要保存的位置啊,如果你如果我这里不选择的话,那,那那就是他,那就是他默认会保存在这个啊,安装的 这个系统软件夹下面,如果需要另外保存的话,可以选择啊其他的盘符,那我们这里啊直接还是保存在系统系统盘下面,给他重新进行一个命名,点击下一个 这个地方提示准备导入项目文件,点击导入开始,那现在我们点击这个导入,他就可以进行一个导入的工作,我们看一下直接点导入, 好,现在啊这个导入到这对话框啊,它自动消失啊,我们可以看到这边出现了项目浏览器, 我们打开,我们可以看到现在这个项目已经成功的读取回来了,也就是说这个导入就是我们可以从机器人控制会当中把已经之前编写好的程序啊,可以读出来啊,可以对应的读出来, 那这个名称就是我们刚才秘密的名称。
122凭良学校-电路板维修培训 09:24
09:24 02:01查看AI文稿AI文稿
02:01查看AI文稿AI文稿这个试教器啊,更功能会更强大一点,什么使用电脑软件的形式,比如使用试教器来操作,它的功能会更加完善,所以这个试教器在大多数时候啊,是不需要购买的。 这个操作机啊,又称为机器人本体,是斯卡瓦机器人的机械主体,用来完成规定任务的执行机构。它主要有机械臂、控制装置、传动装置和内部传感器等部分组成。 这是控制器,用来控制斯卡瓦机器人按规定的要求动作,是机器人的关键和核心部分。 好,我们看机器人的粉体啊,这个操作机,那首先那下面这里是他的机座, 然后这里是第一机械臂,这里是第二机械臂。这个位置啊,这个位置是上下运动,是第三关节啊,第三关节的轴,然后这里第四关节是旋转的轴啊,一共是四个轴。 那在这个第二机械臂上面啊,这里有一个自动解除开关,它是用于解除第三关节和第四关节的一个自动解除开关。 在这个第二集的壁上方啊,这里有一些端口,那首先这几个端口啊,这是我们使用这个气管的时候的一个用户配管,这里是用户配线,我们可以使用一些啊,需要使用的 一些信号,需要使用的信号的时候可以使用这个接口进行一个配线,然后这个指示灯是师傅上电的一个指示灯,师傅上电的时候这个指示灯会亮起来, 这个白色的按钮是第三第四关节自动解除开关。
 06:48查看AI文稿AI文稿
06:48查看AI文稿AI文稿好,接着讲 pdp 指定中的站,指定站的指定呢,就是通过门行动作,是手臂在当前位置移动的目标位。呃,大家看这张图,就是, 比如说我要在这个位置去到目标位,他会先升上来,然后呢再平移,再下降去到目标位 啊,账的的其他的功能跟上面的够了,类似他的啊,他的因为他的运动轨迹是无法预测的。然后呢,还有其他的功能,比如说 x 啊,指令加 axy 括号这个啊,然后还有这个啊,加 x 括号多少冒号或 axpo 者, 这些都是一样的,但是他还有一个不一样的地方,就是他还可以限制他的高度嘛,限制他的高度啊, 走到他的高度是以第三轴以限定第三轴高目标坐标界复制的门行动啊,这个是限制他的高度了。然后呢,还有一个呢,是既限指定又限制。 我们来试一下这个的具体内容, a u n p 打造 p e now 总有点卡,好,上个 p, 那我们下面还有一个上个 p, 我们先 让我们的照片拍照,照片的路径 好,先先升上来,升到零, 然后再平移过去, 再下降,去掉皮衣的终点的位置。 嗯,然后我们再看看下一个指令照片,以限制啊,限制目标的这轴的位置,以限定第三方目标,这等于这个的位置移动。这个,那我们就限制一下厘米的扶持, 别美丽名醉 啊,不对,我应该 先去批领再回来,才能看出他的路径是怎么样的 啊,这个时候才能看出他路线的规划。 这样副食吗?对吧?刚刚直接这样批,零批批,这样批的时候呢,是上面那一条黄色线就平移过去,现在呢是副食,是在副食的位置,就是他在他下面的, 可以调整他平移的高度是多少,然后再跳下去重点位置是这个意思,下面还有另一个就是 冒号强制他是多少,然后呢以这样的高度去移动,然后再来看一下这个,这里呢真多,强制 能作息把取消掉啊,我们先去勾 p 一啊,然后再回来看一下,看一下他的路线的变化是怎么样。 好,那执行这一条 啊,他也是提到啊,提到那个副食的位置,然后就平移,接着呢他往下降, 他也是降到直接降到这个副室的位置就没有了,是不是?那就说明是 既定义了他的那个终点的高度,又定义了他平移时候的高度是多少,这个是占了这一块的功能。
34Frank-Li 00:26
00:26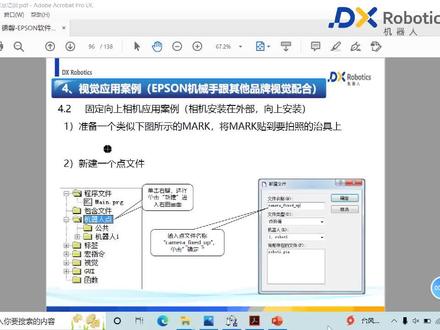 10:52查看AI文稿AI文稿
10:52查看AI文稿AI文稿好,我们接着讲第二种相机安装,就是固定向上,相机装在外面,然后镜头是向上的,例如是这样的,这样就是安装在外面固定向下,那把相机装在下面倒过来往上照,也是固定向上的啊, 固定向上呢,也是一样啊,也是一样说啊,准备一个那个点了,就固定向上,你总得要, 比如你机械就取一个东西,取一个东西,或者说你做一个尖端,取一个产品,或者做一个尖端,在那里有个特征点是可以在相机上识别到的, 然后呢我们就新建一个点类,表示专门用来作为啊,这一次视觉教准啊,那些拿来用的 那个点位。好,一样做一个,这里呢要做一个,呃,工具坐标,也是这工具坐标,但是这个工具坐标呢,是要以你那一个,呃,那个点来了,就是 就是你因为相机是固定向下向上的吗?那你就在视觉上面看看你的,看你的那个 啊,特征点啊,特征点,骂个一个,然后在相机上你再标一个叉,标一个标记在这里,固定不动的机器人在旋转一百八, 选一百八之后呢,那个慢了点,在移动机器人移动到你标志的那个叉这里,这样就算完成一个工具坐标了啊,主要是这样来做的,然后呢 这个呢是要视作测试啊,切换到,然后旋转看,就切换到你刚刚形成的一个工具坐标啊,在你的视觉上面看,然后呢去旋转, 旋转,看到你这个特征点在你的视觉视野上面啊,旋转的时候是不是你你这个特征点来旋转,如果是就正常,如果不是的,那你就说明就重新做了。好,接下来是做九宫格, 好,九宫格啊,九宫格。这时候做九宫格呢,是要在新建的一个工具坐标系下啊,出而一下面去做是叫做九宫格,也是也是移动机器人那个特征点在你的呃视野上啊,出现在这些位置啊, p 十一保存到 p 十一到 p 十九,比如说十一,十二,十三,十四,十五,十六,十七,十八,十九是这样来移动的,这是一个减型啊啊二型啊一这样这样这样来移动啊, 这些点位呢,记住一定要在初二一下去保存来。好,然后接下来都是类似我们新建一个程序文件 啊,程序软件也是前面是有类似的哈,也是说一些设置啊,变量的,变量的定义啊,速度,还有点位 点位表的,是那个提取用来的点位表,然后呢就是通讯打开,打开方法到底是作为客户单还是服务器这边呢?是要由呃机器人这边 工程师和视觉那边工程师对接好就可以了啊。打开然后等待通讯上来,然后还是一样去到拍照位啊 pi 就是我们刚刚十一到十九啊,我们去到刚刚十一到十九的拍照位 啊,然后就等到位了,等待一秒钟之后就发那个拍照机器视视觉相机收到拍照呢,就他触发拍照,拍照之后呢就发送数据出来了,发送他的一个像素坐标出来啊,也是一样,看看他是不是呃 ok 呃 ok 的,就是这一个啊,收到数据收到制服上,然后呢分解,然后呢再进行转换,转换之后呢就进行放大,是不是 ok 的, ok 的话呢就是把它的像素这边保存到 p 一到 p, p, p 九, p 一到 p 九啊啊, p 十一减十,就是 p 一了就 p 九,然后保存到对应的点位,也是这样啊,也是一样执行一个生成校长文件的程序啊,啊,那个文件生成一个执行一个程序是生成校长文件的啊, caa 好,然后你就运行运行那一个啊,这一个程序啊,然后执行执行,一直执行,执行之后呢,还是一样看他的最大偏差和平均偏差, 这样的就生成了一个教程文件,生成就的文件的意思就是你一个像素对应多少个毫米是这个意思 好,然后呢就接下来就是要试教一个放料位置,放料位置要在试 自觉拍照计算到的工具坐标下保存新鲜的产品,比如说啊,放一个放在位,在兔耳铃下移动机械手到对准位,新建一个扑耳函数啊,那就可以了,在兔耳铃响这样的放在位, 然后呢再调用一个开装程序啊,然后再调用计算和工具坐标, call c, a, l c, 兔儿生成新生成一个工具坐标,然后呢再去放掉新生成的工具坐标呢是兔儿二。那我们就看一下这一个是什么意思。 cia 的 tia 的吊用这个止尘器,这个止尘器是用来干嘛的? 看一下啊,喜悦 a 的固定向上啊,这就是这个,这个是用来干嘛的呢?就是 我们每次去吸一个产品过来的时候,他特征点都会相对于第一次做较准的时候位置会有点不一样,不可能说,除非说你能做到每次取回来他的特征点都不会偏,不会不会歪。 那这样的话我们用视觉没什么意义了,我们视觉用的意义就是动态吧,就是你下一次取了未,取了之后,他的 在机械手上的特征呢,他的会位置会有点变化,那就需要用视觉做动态处理吧,动态识别,那每次这样的,因为我们做的时候呢,是以啊你的特征点为 新的工具坐标,也就是新的旋转中心嘛,去取去放料的,那我们每次去取一个新的产品之后呢,每次都会过来这里拍一个照,固定向上的照, 拍完照之后呢,我们会新生成一个新的工具坐标,也就是这一串啊,这一串程序的这一个,这个指指程序就是用于新生成一个新的工具坐标,然后旋转中心 就移到你的产品的特征点上面了,只要是这样来用,这样就可以保证说你旋转的角度啊,移动的距离,都是以你产品的特征 中心来做移动,这样就可以保证的到你每次放料都是很准的。 是这个意思啊,然后弄完之后呢,就是啊,切换到,切换到你的工作标识一下啊,然后在出合器下保存放到位置,这个呢就是你的那个放到位了。 好,这一个呢是我们的逻辑吧,就是每一次因为我们一开始新建的是一个,呃,这是第一个新建的,这是第一个新建的一个工地售票,然后把它保存起来, 保存起来之后呢,你看我们这里就是这样了,直接吊用吊用拍照程序就是拍照 获取数据转化,然后呢再调用工具坐标函数,就是直接形成成一个新的,每次新人呢都会把它保存到那个兔二下面去, 还有一个呢,一个是角度的问题,模仿基准角度啊,或后取出来,然后呢就直接切换到啊新的工具坐标系下去 执行你要走的那个点位是多少就直接去了,就这个意思啊,他的逻辑就是, 呃,因为我们前期已经做好了一些教准了,教准文件已经做好了啊,科目科初始化成器 init 啊,就是把那些点位啊,教程文件调出来,通讯把它打通之类的, 然后呢就是调用程序啊,视觉拍照程序,就是拍照获取 高速坐标啊,然后进行转化之类的,然后呢就调用这个新生成的新生成工具坐标,每次拍照都生成一个工具坐标,新的都保存到图和二这里,然后呢以这个图和二呃为选长中心, 一放我们最终的产品的位置 p 幺零幺,那我们看一下 p 幺零幺啊, p 幺零幺是这个意思, 嗯,最终的就是 p 幺零幺,把它保存出来了吗?就是这个意思啊。 好,我们固定向上的逻辑就是这样的一个呢,也是准备准备一个特征场景特征点啊,然后做 做一步步来啊,产品特征点新建一个程序,然后做工地坐标,然后呢做九九宫格试教,九宫格试教之后呢就生成教转文件吧, 就等文件生成完成之后呢,就是跑正常的逻辑程序,先拍照处理,然后呢调用工具坐标函数,就新生成一个新的工具坐标,以你的新取的产品的特征点为选长中心,去 放视觉给像素过来之后,机器人转化处啊,分解转化处理之后的点位,这样呢就可以保证以你的呃产品的特征中心去放掉了,就是这样一个逻辑。
20Frank-Li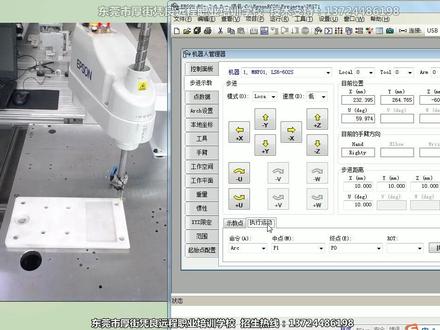 08:48查看AI文稿AI文稿
08:48查看AI文稿AI文稿大家好,这节课我们来学习爱博生机器人的常用指令。爱博生机器人编程中常用的编程指令主要有两大类, pdp 动作指令和 cp 动作指令。 pd, pdp 动作指令是经过机械手结构上最容易活动的路径到达目标位置的动作指令。 pdp 动作使用各关节上配置的电动机,使机械手通过最短的路径到达目标位置。 因为他是通过最短的路径到达目目标位置,所以他的优点是运动的速度快, 但是他的缺点是运动的轨迹无法事先预测。 cp 动作指令 是规定到达目标位置的路径,轨迹是几乎按照这个规定的这个目标的位置,他这个路径轨迹了运动。 他的优点是轨迹可以控制他是匀速运动的,缺点是他的速度比较慢。 对于这个 pdp 指令和 cp 指令,它有对应的一个速度指令和加速度指令以及动作指令。 像 pdp 动作类型,它的速度指令有 speed 和这个 a, c, c, e, l。 它的动作指令有 go 和 jump, c, b 动作指令。那在速度指令这里,它的指令后面加了一个 s, 加速度指令后面也是加了一个 s 动作指令。 c b 形式运行的时候,它的动作指令使用的是目五, 还有一个 a, r, c 指令。 首先我们看一下这购指令,各轴同时做 pdp 运动, 多关节从各自当前的点向目标坐标叉步移动,所以无法预测轨迹。所以使用这个指令的时候务必要注意于周围设备的干涉, 防止因为物周围的物物体导致机器人的轴在运动过程中因为碰撞导致损坏 它的格式,直接使用指令 go 空格加目标点,例如 go p 一,机械手动作到 p 一点。 好,我们现在我们打开 app 三 r c 加七零零软件, 然后连接上机器人控制器, 打开机器人管理器, 给机器人电机上电, 我们在不禁视角这里 给机器人试教,啊,我们给机器人试教两个点出来 啊, now 啊啊, 好,我们给基人示教一个点, p 零, 然后我们再移动机器人移动到另外一个点,给它施加为 p e 点。 哇塞, 好,我们记录下啊,当前位置设定为 p 一点, 现在我们在选择执行运动,这里我们选择 go 指令, 那当前位置我们当前位置是在 p 一点。那比如说现在我们选择 p 零点,让它回到 p 零点,我们观察它的一个运动轨迹,我们点击执行, 我们可以看到它运行的时候,这个轨迹 他是不确定的一个轨迹,最终就是说从当前位置最终到达目标点,但是他这个移动的过程中的轨迹啊,是不固定的。 好,下面我们看这个 top 指令,通过门型动作,使机械臂从当前位置移动至目标位置。 他这个门型动作的意思,我们可以看到,从当前位置开始走的时候,他会先把这个第三轴先进行上升, z 轴先进行上升,然后到达目标点上方位置,然后再下,然后再进行一个下降, 那他这个特点就是说可以绕开好,可以绕开一些障碍物, 他的格式,丈夫空格加上目标点。好,这是写指令的时候的一个格式。那我们可以现在先看一下他的轨迹, 我们在执行运动这里选择 jump 指令 当前点,当前点是在这个 p 零点,我们让它移动到 p e 点执行, 我们会发现他首先会进行一个 z 轴的上升,上升啊,上升到 上,上升到 z 轴的这个零点位置,然后再开始移动,然后到达目标点,目标点上方再开始下降,所以它的轨迹是一个门型的一个轨迹, 那这样就可以很好的避开移动过程中的障碍物。 我们可以看到在指音指令动作这里,它里面还有一个指令叫。
 03:00查看AI文稿AI文稿
03:00查看AI文稿AI文稿工在空间中做直线运动的, 那我们我们这个机人的,就是说我们都会给他安装一个工具,那个工具的话他有一个中心点,就是我们这个工具的一个作用点,那这个作用点就是说我们这个线性运动,他就这个作用点在在这个空间中做一个直线的运动。 好,我们看一下他,比如说我这里装有个工具,他的工具就是说我们从线性运动的时候,他就是工具中心点,他沿着啊,他走的是直线的一个一个直线的一个路径来走, 我们看一下,那他走的是直线,我们看一下,我们把这里模式切换为默认,或者是切换为这个本地 啊,都可以。然后我们看一下大家,主要啊,主要我们可以看到我们刚才关节位置的时候,他是每一个关节的进行社交,我们切换到这个默认,或者是啊本地的时候,他就会这个 x 轴和歪轴啊,他就会啊,这个这个视角的方向啊,就改变了 啊,他的形式就改变了,那主要这个线性我们指的是挨个走和歪走的一个方向啊,他的一个移动方向, 那这个 z 轴和啊,这个 z 轴是上下的一个移动啊,这个这个基本上没有啊,基本上和关节移动方式啊,啊,基本上是啊,基本上是雷同的,就是说针针对四轴机器人的,就是说他这个 z 轴啊,和这个和第四轴啊,他这个和关节坐标和关节模式的 啊方式类似,然后主要是挨着走和歪走,我们看一下挨着走运行的时候,我们可以看到他会沿着这个走挨着走的方向进行运行,他走的是个直线, 然后他的运行的过程中我们会发现啊,这个一,第一,这个第一轴和这个第二关节这里啊,他是进行,他是相互配合来运行的,我们会发现他这里也会有第一关节,这里也会有,也会有动作啊,也会有配合的一个动作, 那也会配合的动作。然后我们看一下这个歪走,他走的时候他这以歪走的一个方向进行一个直线运动, 然后这个时候,好,这两个走是配合了运运动的 好,这是我们这个现行运动。
 04:19查看AI文稿AI文稿
04:19查看AI文稿AI文稿在没有运行标定前,我们做的准备工作室设置好马可点,设置马可点,把机器人的手臂中心移到相机的中心,然后保存为马可点, 然后我们运一下程序,看一下动作演示。 好,我们进行下程序,讲解这主程序,然后这设置 打开电梯设置点击的速度,然后这块就是九点标定的程序,让我们先定义一个变量 i, 然后定义要偏移的量 i 和死和 y, 这个就影响我们标定的时候,然后他 走到大小,如果是设置过大的话,他就超出事业范围。然后我们首先先把马克点复制给十五,因为十五就是中间的点,然后他的点是一二三四五六七八九, 然后我们第一点就是说 max 点 x 十五加上这个纸,然后他的外减去那个纸,减去便宜量,然后十二 就是中上中上,然后就是说 x 不变,然后外减去偏一量,然后左边就是 x 减偏量,外减偏量他的 z 和旋转都是不变的,然后我们看一下左中,左中就是 x 左上,应该左中, x 减偏量,外不变一次就是左下,右中右下,然后这个精神点位的跑变量,哎,就是我们从点十一开始跑到点十九,延时和 一秒钟,然后最后又跑到马克点中心,然后这条指令就是说把我们跑完的点位,然后保存到,如果他一中,让我们看一下跑后的点位, 这些是没有的,然后他跑完他会自动生成,首先我们先把它伸出,然后再沿看一下, 我们再打开, 然后这些天又自动保存,当我们改改变马克值的时候,他九点标定跑完的值,这个会随时改变。
65繁星 00:36查看AI文稿AI文稿
00:36查看AI文稿AI文稿这种类型的四轴机器人是由 x 机器人公司生产的四轴 scar 机器人,这是一款非常有代表选择性合并装配的机器人。这种类型的机器人具有四个关节,七轴,包括水平关节一轴和水平关节二轴控制机器人在 xy 方向上前后左右的旋转和运动。 垂直关节三轴控制机器人手腕的垂直运动,旋转关节四轴控制机器人入方向上手腕的旋转。这四轴的结构使得这类机器人非常适合在水平平面内进行精密组装和处理任务,例如在电子制造和装配领域。
511零点测控 01:17查看AI文稿AI文稿
01:17查看AI文稿AI文稿大家好,我是公共图哥,嗯,今天给大家讲解一下爱不胜机器人。首先打开魅影程序,然后这边呃判断电机四伏有没有上电,如果电机是没有上电的话,我们摩托昂让四伏可以正常上电。 然后这边翼斧和岸的翼斧一定要成对出现,紧接着啪啪就打开正常电机工作模式,高功率模式嘛,啊, 然后接下来的话大家注意看啊,这边有一个度和落魄,这是一个成对出现的指令,相当于循环程序,始终是在度和落魄之间循环,少不了 ok。 然后这边是 b 的和 accel 是 b 的是速度,只针对够有效, accel 是加速减速度够,就是说关节运动,关节运动,移动到 p 一是够, ok, 然后位的零点一 就到位,之后我延时一下,这样可以用来进行抓取啊,比如说移动到 gopi, 那我如果不用零点一的延时,那我也可以用为他 pose, 那这样的话激情也会在相应的位置进行一个延时。好,我们打开界面运行一下激情,让激情跑动一下。大家看 这边的话,目前就是用够进行一个动作,够的话是点到点之间有一点弧线,他的速度会比较快,但他的点位呢,是无法进行预测的。
 01:12查看AI文稿AI文稿
01:12查看AI文稿AI文稿大家好,我是公共图哥,今天讲一下爱普生机器人的直线运动,也就是也就是点与点之间是以直线移动过去的,也就是 abb 机器人的木偶库卡机器人的 lrn 发拉和机器人的 l ok。 首先 print 就是把我们现在上面屏幕上的字打印到运行界面,然后是 b 的 s 和 accels, 这两个是针对 mov 一的,也就直线运动嘛啊,然后 mov 一移动到点位 pe ok, 然后到位之后位特 pose 确定一定会到位,这样假爪才可以,假爪才可以动作嘛啊,然后可以目录 pa 移动到第二个点位,到位之后同样位特 pose 这样位的 pose 的话主要就是让点位到位啊。打开运营界面,然后这边 我们点击开始,大家看到了吗?上面把我刚刚的公共出歌持续更新,欢迎关注。打印到界面上来就是用了 please 这个指令, 通用的这个指令嘛,还可以用在一些报警的画面显示,包括我打印到运行界面上嘛,然后另外的话就可以做一些自动布,然后在运行界面上供大家进行参考。好,谢谢大家观看。


猜你喜欢
- 4.7万白敛
最新视频
- 3.2万雷自信