ethercat 入门教程
各位公共朋友们大家好,这一期我们再次重温一下关于新节走伊人看头啊,总项控制 前期的一个配置的一个情况啊,以及后面我们要讲的在软件端怎么去写入相关的执念以及一个配置方法。 首先我们先看一下啊,这个 prc, prc 我们采用了一个小型 prc 叉 d h 三十 a 幺六啊,三 c 幺六 l 杠一的一款 prc, 这个 prc 他有两组,二接十五口,上面这一组是连接我们上位机或者 我们电脑段进行上下载使用。第二个 ig 十五口是连接我们的总线型驱动 啊,第三个呢,这里有个圆孔,二三二是连接我们这边触摸屏用的,同时我们这款 prc 他也支持四八五,这四八五口是在我们输入端啊,输入端的最后面有个 ab。 好,我再看看我们这里总线的这一个驱动是使用的细节的闭反的 一款总线驱动,这款驱动呢,他同样有两个二阶式五口,他的分布方式是下入上出 来我们看看。在触摸屏画面端,我们这边做了一个简易的程序,就是控制他的一个正反转。 首先我们把这个死人打开,整体是死人,已经 ok, 走,暂时为运动啊,我们当前的坐标是可以射的, 把这个当前位置可以清零,同时做了一组他的一个正反转的一个软香味。来,我们看一下他的一个正转啊。

粉丝914获赞2083
相关视频
 04:54查看AI文稿AI文稿
04:54查看AI文稿AI文稿今天来学一下如何通过总线控制一个轴的运动。首先 p l c 的 ethernet 口接到交换机上, is there 开的口接到四伏驱动器上,编码器线和动力线接到次伏电机。 然后新建一个 plc 程序,在通讯设置中搜索到我们的 plc 初始 ip 为一点八八,右键 easercat 自动扫描。 p l c 可以扫描出所有下挂的 either cat 设备,扫描出一台四伏驱动器,点击更新组态,此时我们就多了一个 either cat 设备和一个运动控制轴。点开控制轴设置一 一下参数 二十三位编码器十六,禁制为八十万, 如果没有减速比,就选这里。转一圈,移动的距离就是丝杆倒成, 如果有减速器就选这里。写入撕杆导成和减速比。我这个设备导成是时,减速比也是时。根据编码器类型选择模式,我这个是绝对值。编码器运动方式也是线性模式。会员方式可以有多种选择, 可以选择传感器回原或者以当前位置为原。如果你的机构上有原点传感器,就可以使用原点信号,这个就是传感器,有原 圆点和正负线位,用于限制运动范围。如果没有你的会员方式,可以选择三十五,以当前位置为原点设置。完成这些就可以写运动控制指令了。我们要实现基本的点动和绝对定位功能, 首先添加使能,只有这个指令接通四伏才会响应运动指令,四伏报警时还需要用到复位功能。另外还有急停点动、绝对定位回源等基本指令。 把这些指令都加上,因为我们只有一根轴,所以轴号都是零,可以把这些点位都改成自定义标签, 改完大概这个样子,当前面的点位接通时,就会执行 相应的功能,这时还需要给这些功能指令写入一些运动参数,比如正转、反转、电动速度加减速度。 点动指令写完这个样子,当政转为 on 时,按指定的速度正转反转也是一样道理。 绝对定位指令这样词用,当绝对定位执行为 on 时,电机会按目标速度走到设定的目标位置, 当走到目标位置后,这个定位完成,信号会收到一个上升岩信号,然后就可以利用这个信号来点亮我们的状态灯,提示已经到达目标位置。 程序就这样写完了,把变量表导出,开始做触摸屏程序。 先做个使能按钮,控制地址,选择 p、 l、 c 变量, 用同样的方法做出别的按钮,触摸屏整体效果就这样。确认一下写入的地址是否正确, 看起来没啥问题。运行看一下效果,使能 p、 l、 c 能收到 复位,也可以写入运动参数。 回原式是 似乎当前位置变成零了。走个绝对定位 运动过程可使轴暂停继续运行,也可以到达位置。指示灯变亮,按正转向下运动, 反转向上运动,一个轴的简单运动就这样了。当然四伏的运动模式还有很多种,比如增量模式和力举模式等, 不同的场景会用到不同的功能,当用到的时候可以去试试。好了,视频就到这了,希望对你有帮助。
2838班工不吃猪脚饭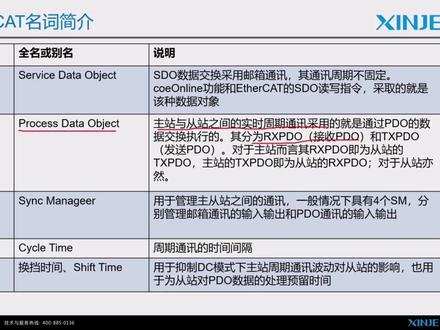 02:46查看AI文稿AI文稿
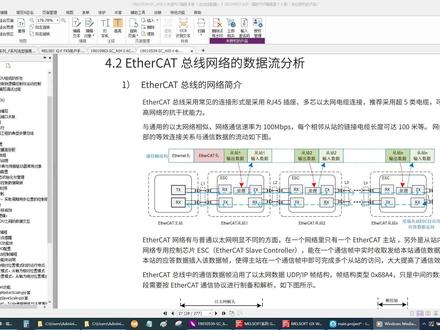
02:46查看AI文稿AI文稿信捷 p l c 视频教程 ethacat 总线 ethacat 名词解释首先介绍一下关于 ethacat 的一些特有名词。 第一个 s d o s d o。 指的是服务数据对象,它采用的是邮箱通讯,最大的特性就是通讯周期不固定,主要的应用场合就是我们后面的 c o e r i 以及 e c k 的读写指令。 第二个 p d o p d o。 指的是过程数据对象,主要应用主站和从站之间的实时周期通讯。 p d o 分为两个部分,接收 p d o 和发送 p d o。 第三个 s m。 同步管理器, 同步管理器主要用于管理主从站之间的通讯,一般规格下都具有四个同步管理器,分别管理我们的 s d o。 输入输出和 p d o。 的输入输出。 第四个同步单元周期,主战队从战进行数据下发时,整个周期的一个数据完成,指的就是同步单元周期。 第五个,偏移时间,又称换挡时间,主要用于从战队 p d o。 数据的处理预留时间, 当主战对从战进行 p d o。 数据下发时,需要给从战预留一部分时间,对数据进行处理,然后再进行回发, 这部分时间指的就是偏移时间。 e s c e s c 全称,指的是 e 三 k 的从战控制器,一般从战控制器的话会有四伏,会有远程 i o 等。 e s c。 寄存器, e s c。 寄存器指的就是 esake 的从站控制器中按照一定的规格标准所规定是设置的寄存器。 esi 文件全称 e c k 的从战描述文件,这部分文件用于存储从战的配置和一些信息,主要是由设备厂商提供叉 m l 文件格式,对于大部分的一个从战来说,内部也有一一块芯片用于存储这些信息, 主要用于识别我们的存站。 e s m 又称为 c k 的从战状态机,每个从战都具有四四个状态,在不同的模式下具有不同的通讯方式的一个受限主战在发送切换请求时,从战根据不同的请求在进行状态的一个切换。
174武汉德智自动化 01:10查看AI文稿AI文稿
01:10查看AI文稿AI文稿信节 p l c 视频教程 ether cat 总线 ether cat 配线与连接下面介绍一下实物的配线和连接,这里以叉 d h 主作为主战, d s 五 c 作为从战, 遵循的接线准则也是标准的下进上出。在接线准则上部分厂家可能会有差异性,实际接线可以按照手册进行连接。 我们这边看一下实实物连接图,叉 d h 只有两个网口,上面一个网口是以太网口,用于我们 pc 端的软件下载以及数据监控。 第二个就是以 easter kill 口,我们接线的话从主站的第二个 easter kill 口进行 连接,连接到我们从站的第二个 excel 口,遵循标准的下进上出,接线完之后再由第一个上面的口连接到从站的第二个部分,这样的话就是一个最标准的线性连接。
109武汉德智自动化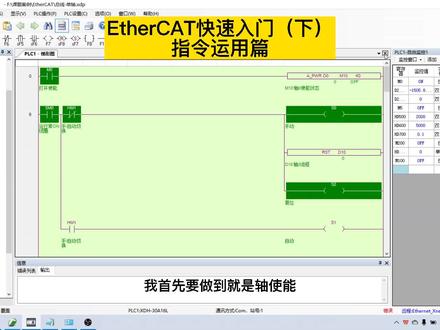 09:56查看AI文稿AI文稿
09:56查看AI文稿AI文稿我首先要做到就是走死人,走死人我们这里做了一个啊,常开的一个输入指令,走死人使用的是一个 a 下横线 p w r, 在参数配置里面可以看得到的, 第一个是我们的一个输出参数,这个输出参数他就是一个相当于我们作为一个报警码初步码,当我们处于一个 非死人的时候啊,他就是一个 boss 啊。当死人成功以后啊,让我们看一下这个纸,我在充电器上面操作一下,把死人打开,然后我们重新监控一下 他,这也一个自动的状态啊,这里就显示了一个处啊, 状态也可以通过我们指定表里面去监控他,包括监控有没有死也行。 然后我们直径表里面有讲到,包括我们轴零是 m 两千加五十乘以轴号啊,我们轴零的话他读到一个死人状态的词,我们就读这个 m 两千这个位 这里。然后如果是周一的话呢,那应该一次是多少?就是那么两千零五十,那周二就是那么两千零一百。 好,首先我动,我们这里做这个手动正转和手动反转,这个手动正转它采用的是 六十四位双进度,一个古典的一个传送。 et m v 只要是一人看的这个定位指令中都 必须的十六思维辅点的这一点一定要区分好,包括我们触摸屏上面做的这些什么速度设置的纸啊,监控啊,都一定要选择双字辅点,我们这里做了一个正反转的一个指引哈啊,这个 etm v, 他就是将我们的触摸屏上面设定的这样一个目标纸 啊,传到我们的一个 hd 幺零八年那个目标速度里面手动速度 啊,当我们做反转的时候,我们采用一个双字符点乘一个负一啊,改变他的这一个账户关系,可以让他的一个方向的打开与否,他是一个 a 下横线 v e l v e, 对吧? 到这里面我们可以看到一个指令参数配置,这个配置呢?这个指令又叫速度控制运动 啊,就是这个指印以设定的速度持续运动,所以说我们做这个指印的时候,配置完以后,就是说我们这边上身也出啊,他正转也好,反转也好,我们下面一定要做一个多补啊。首先就是我们的一个手动速度要起立幺零八年,是吧?他 占用了一个幺零八年到幺零九八这一组,所以后面的写其他的定位指令的时候,相关的计算器不要和这一块重复加加速度,我们加加速度一定要大于他的加速度和减速度, 这一块一定要注意一下,不然的话这个速度到时候起不来的啊。出马 hd 二零八零二零八年,他根据我们计算机里面的值的一个变化,有相关的一个错误 提示,然后再一个就是 m 幺零八零,嗯,占用了一个五个位啊,嗯,就是像完成啦,或者忙碌啊,激活啊这些一些报警错误状态呀,我们都可以取这些位状态的进行一个实时的一个提示,触摸屏上面后面这个就是我们的一个轴号, 然后我们看一下,嗯,关于这个手动效果啊,速度控制,云动指定他,我这里总结了一下,注意点应该有两方面, 第一方面就是寸动中,就是我们手动不管是正转也好,反转也好,寸动中的时候 我们做一个寸动正反的保持,一定要做一个保持的标志位,你看我这里正传有一个保持标志位反转啊,也有个保 指标,这位分别是 m 幺二零年、 m 幺二零幺,他的好处就是当出现我们碰到实际的一个物理极限的时候,我们可以马上去这个标志位进行一个十多步啊,十多步当前走啊。第二个注意点就是 我们这是寸动上上眼,是触发他一个手动运动,我们要取他的一个寸动的状态下降眼,我们这里写了一组 下降炎,当我们手松开的时候,马上要停,停止他啊,要停止相关的这个 这个走号正确的停止,就是我们也是要输入啊,一个参数配置的啊,包括我们的一个,比如说我这个输入参数 一号是第一百四,第一百四代表我们这里是啊,这个减速啊,加减速啊,还有停止类型可以选择,我们这里选择减速停止,当然我们可以选择立即停止,就是急停啊,还有个急停并关闭死人, 这都可以通过自己去配置的啊。第二组参数就是我们一个嗯,出马的一个输出状态第二百四 啊。第三个就是,呃,我们的一个状态,包括是是否完全忙碌啊这些啊,进行全部这一系列的啊配置,进行一个售后部停止啊, 这就是我们要注意的一个娘娘方向。刚刚说的注意点,第一项啊, 就是取正转和反转的时候一个标志位,你看我这里,比如说读到一个物理极限,比如说一个是十,一个是十一也好,或者是我加了一个软件位状态也好,他可以马上直接就是多给他。同时我们做一个批次复位,把我们的一个正反转的一个状态 进行一个复位停止运动的一个搓澡方式啊,搓澡方式我们这里都是支持常开常闭啊啊,或者是上下眼下降眼 啊,这里我们有一个比较指令,这里的比较指令不同于我们常规 prc 的这样一个比较, 常规 prc 他就是什么大于小于等于大于等于或者小于等于,我们这里的比较执念就是啊 etcmp, 这是属于一个伏点数比较他的出发方式,支持常开常闭或者是边缘出发 啊,就拿我这一条直径来讲啊啊 etcmp。 然后我们这里有一个比较的一个数据,一是 hd 四千五比较的数据,二是第一两万零四十四, 那比较结果是 m 一千六,他是结果是放在 m 一千六这里面的 m 一千六 他就占用了三个位。比如说 abc, 就是等于大于的时候, abc 就通, 当等于的时候是 m 一千六百零一倒腾,当小鱼的时候是 m 一千六百零二倒腾啊,这就是一个关于伏天数比较,在总线里面的一个 纸巾的运用,他涵盖了大于等于小于啊,这个就是我真的用到了,就是作为一个数据的软纤维,所以要用到这个比较纸巾位置清零啊,就是折号清零,就是折号 k 零, 之后去你们这里有写到 a w i t y 写中吧。处罚方式依旧是支持常开常闭上肾炎 官方的一个称呼,这个指令叫做修改指令轴的当前位置, 然后他的一个配置啊,同样就是第一组 hd 四百, 这个 hd 四百他是一个输入参数,输入参数他同样占用的是一个,嗯,三组计算机 ig 的四百四十四点五 输入一个参数的一个提示地址输出,这一个参数就是一个我们的一个输出的一个状态吗?啊?啊?状态是有没有异常啊?包括我们一个时机的一个输出状态是完成或者忙碌或者错误, 这就是我们的一个位置,轻盈的一个一个执念的一个写法。会员啊,会员的话,嗯,相比来说脉冲的变化不大,同样上升也出滑,采用了一个 zr 轮啊下横线作为一个区分 啊,电影就是我们一个状态吗?啊?是否有异常啊?那三十占用了十五个位啊, 位,然后进行一个最后走号的一个指定, 然后这边我们 作为一个绝对定位,绝对定位怎么做呢?啊?前期呃,也做了一个很详细的解答,这里大概就是讲一讲,觉得因为它相对于我们这个脉冲一样的,只是前期多了一个 a 下横向 dla 啊,第一组参数 hd 五百码目标位置是吧? 啊,然后 hd 六百就是我们的一个目标速度啊,还有一个加减速啊, 再一个就是我们的 m 五百, m 五百就处于一个他的状态是否定位完成我们可以做比较,就是我当前这个以当前这个目标位置到达以后 m 五百他是至昂的啊,最后就是我们的一个资金走号。
 01:29查看AI文稿AI文稿
01:29查看AI文稿AI文稿efer cat 功能原理讲解 efer cat 独特的运行原理使其获得性能突破。 efer cat 并不是在每个周期中向每个节点发送单独数据针并接收每个节点的反馈, 而是正如视频中看到的那样, if a cat 只是发送一个针,这个针会经过所有节点并进行数据更新,每个节点可以高速动态的读取数据,同时将数据插入到同一针内。因此所有节点共享一个数据针和一个带宽开销,典型带宽利用率超过百分之九十, 而且由于对输入和输出数据使用同样的数据针,因此可以认为每秒两百兆的贷款利用率达百分之九十以上。 此外,如在第二个节点中看到的节点可拥有两个以上的端口用于新型哈弗结构。采用 everkat 无需交换机,因此无需购买、安装、供电以及配置或管理交换机。最后, 但同样重要的是,主战仅发送和接受一个或两个数据针,而不是很多针,这时主战更为轻松。主战可以通过标准以太网端口上的软件来实现。 无需协议处理器和专用的主战芯片,每台 pc 都可作为 eferkat 主战的硬件。在从战方面使用低成本的 eferkat 从战控制机芯片将所有时间关键功能集成到硬件中,不仅节省了成本,也避免了大量的软件堆战,使 eferkat 成为迄今为止 最快的工业以太网技术。 efercat 成本低廉且易于使用,这也就是为什么将其称为以太网现场总线。跟我学,让你更出众!
 24:34查看AI文稿AI文稿
24:34查看AI文稿AI文稿嗯,我们演示一下,就是会穿的 h 五 u 啊,通过这个 ins kite 的总线,嗯,驱动四伏,然后程序快,我这边已经写好了 人间画面,我们先仿真,看一下效果, 五优的那个 p r c 跟它那个戳屏是可以联合仿真的, 而且会穿的这个,嗯,仿真功能也是比较强。呃,我们演示一下,首先要给电机上石能,嗯,点击一下石能,然后电机这边 显示了一使能,就是我们这个 ib 块的右边这里使能为昂,这个时候,此时我们点这个加,就是正转四伏的当前位置,当前速度啊,都是有值的,他正在正转,他的那个位置已经发生了变化, 这个点就是反转往副方向运动,然后这里还有一个 home, 就是回零,把当前的位置给支零。 我们再试一下绝对定位,首先比如说我设一个一千的速,一千的目标位置,嗯,速度五百,加速度我们随便设也设一千, 我们点一下这个绝对运动位置,他会走到一千后停止, 好,现在已经运动到了我们的设定位置,嗯,我再比如说我再改到一百, 再次点击绝对定位,这个时候点 stop, 它是会根据我们设的这个加减速度来做一个停机动作啊。如果我再次点击绝对定位,我点这个 e stop, 就是急停,它是会走那个一个比较 比较快的一个停止,就当有紧急情况的时候,可以用这个急停给他停机。 呃,我们再试一下,就是比如说我们有些参数设置不合理,比如说我速度设置太大,设五万,我们再点击一下运动,他现 会报这个轴控指令错误轴也会有一个报警,在我们这边轴的错误 id 跟报警都是报警显示为 on, 然后有个错误 id, 这个时候需要执行一个轴复位的指令,就点这个 reset。 嗯,轴已经复位了,我们把速度改到正常来继续运动。 嗯,两千还是太大,改到一千或者改到五百也可以。 他的这个位置速度加减速啊,他都是一个浮电池,现在已经运动到了一百。嗯,复制也是可以的,就是我们复位再点击绝对定位,他就会运动到一个复制。 嗯,演示就大概到这里。我们看一下这个程序啊, 整个轴控的功能快就封装呢啊,有那个上上使能的功能,回零的功能就够,就够,就正手动正转跟手动反转的功能,可以设定手动转速,手动运行的时候的速度 啊,绝对运动的功能,然后设置一个绝对运动的定位位置,设置一个绝对运动的速度 啊,设置一个加速度跟一个减速度,就是我们绝对运行的加速度跟减速度。还有一个是停止,这个是急停,这个是复位,然后右边输出。我们监测 啊,一个是轴有没有使能啊,轴回顶有没有完成?嗯,这个写的是应该是一个上升岩里面,他不会持续的啊,他只会按一下 这个是回读轴的当前位置,回读他的速度,然后回读他的例句,因为我们仿真的话是没有例句的,但是如果是真实的四伏电机,他是有例句能读出来。然后轴控指令执行错误的一个标记, 这个是私服,私服驱动器里面的报警代码,然后这个是我们轴轴控指令报错的代码, 这是我们一个轴处于报警状态的标记,点到 ab 块内部, ab 块内部就调用了, 调了它系统的几个指令。我们在我们在那个轴控指令里面,这有 m c, m c 轴控,有 e z k 的和本地脉冲输出,它都是用这个 m c 轴控指令里面有基本指令, 调用了一个 m c power, 就是给电机上电的使用, 找到惠川的那个惠川的帮助,里面可以查看他的首次,我们看一下指令,首次我们打开指令,首次看一下, 然后这里面找到指令详解,然后我们找到我们需要的 m c 轴控, it's a cat, 或者它跟那个脉冲输出也是一样的 基本指令。我们找到我们需要的 mc power, mc power 这个手册里面有对他的那个,嗯,对他的那个一个说明吧。指令名称是叫 mc power, 他的作用是使能轴, 他的梯形图表现就是一个图块吗?嗯,第一个是他的指令的指南,第二个输入是他的轴号, 然后输出的话就是使能标志使能往使用错误跟错误带嘛,就这个,其实就他这个指令,也可以说他的这个图块的那个执行的一些结果。 我们继续看我们的手册啊,它在因为 h 五幺,它也是支持一个结构化文本 st, 它在 st 的调用一下是是这样的,就是一个 文字形式,它是个连续执行的指令,第一个 s 一就是这个,这个,这个 a 叉 s 这个参数啊,填的是轴名称或者 id, 我这边我这边引用的就是这外面的 快外面的那个轴号,这边轴号是从零开始,零一二三,其实也就对应着我们这里的,对应着我们这里的,这里的这个轴号,轴号零, 然后根据你这个轴颈要斜几,他就能驱动对应的轴是一个 c power, 然后使能标志就是使能是否成功。盲标志跟故障标志,我们嗯就不想 详细的讲,就嗯盲标志,故障标志就是指令指行,这个意思,大概意思就是,呃,比如说轴故障标志,指定故障标志,就是你执行这个指令,他没有成功,没有给电机成功商店,然后故障码,故障码手册呢?也是有,可以自己翻。 第一个是 mc power, 就是给电机上电,我们四伏电去运动之前都是要给它上电,嗯,叫法不一样,有的是说上神能,有的说上电,有的说历史,其实都是一个意思, 就给四部电机通电。第二个是第二网络二,我们写的是那个原点回归,就是我们判断了外部的回原点开关有效的时候,并且在使能,并且没有在手动,并且没有 吊带绝对定位,我们就对这个轴进行一个回零,看一下,这个指定就是 m c 控, m c 这个 m c home, 找到了 m c home 是原点回归指令啊,它的指令是作用是回原,然后土块是这样的, 他的 s 一参数就是这个 axs, 也是填着我们这个轴号。第二个是圆点偏移,我们填零的话就是不偏移了, 然后原点回归完成这个 dne, 这是盲,也是这个是中指,也是有故障的,比如说他回令失败了,也是会有,也是会报错,然后故障代码也是可以直接跳到我们这个手册内。 做人就是回零,就是把大概意思就是把当前位置定为零,然后我们有个后面,后面是一个 joe, m c joe, 把听音图缩小一点吧,能看全 mc 旧狗的话调用它。我在前面加了又加了一系列的一个些条件啊。首先前面两行是我们判断这个速度啊,太小的时候,我们强制给一个初始的速度, 就当这个我们外部设的速度不合理的时候,比如说我们这个有个交口 spe 的,就是手动速度,比如他小于五的时候,他这个浮点说小于一个五,我们就把五传给这个点动速度,就相当于给他一个初始值, 你外面设了的话,如果没有超出我们设定的范围,他会按照呃你外面的设定的值来。当这个大一百的时候,意思就设了一个上下线,下线是五,上线是一百,这是手动运行的速度,给他限个速,手动太快的话,一个是比较危险, 然后手动加跟手动减。同时我们设的是同时只能一个有效,如果两个同时按,他是不会执行这个就可运动的。然后就可运动的前提是主要上使能,跟这个回音一样,就是执行。 执行一些指令之前他其实是要首先使能的。嗯,这里有说明 是我们跳到这个,这个是 home 指令也,他是说只有 m c power 指令切换到使能状态才能调用 这个 home 指令。大概意思是这样的,嗯,再切到我们现在看的是 m c 旧狗,旧狗指令也是一样的意思, 这个指定下面的说明也是一样的意思啊。在使能输入上升研所存这个。嗯嗯, 只有使用 m c power 指令将轴切换到使能状态才能调用这个 m c 做个指令, 然后不再绝对定位,不再回零轴没有就轴外部的停止跟几停都没有点击的时候,此时我们才能进行这个就合运动,就合运动前面几个参数啊,前面几个参数手册里也是有详细介绍啊。 第一个是轴轴的名称一样的,然后正向,正向,正向触发有效就正向点动, 然后这反向点动,这是目标速度 s 四是目标速度,也就是我看一下啊,这个这个我英文也不是特特别好,这个是它的速度,就是我这边填的是我们刚才这里限制的, 做了一个限制的速度,如果速度在我们这个限制上下线之内,就会取外部的输入速度, 反之则为下线或者上线这个速度,然后这一个是加减加速度跟减速度,这个运行态是也是有加减速度需要设定,这边我们就没有把它引到这个功能快的外部去做一个可选参数,我们就写了一个故 电池。这个运动要求也没有那么高,大概就是让他慢速的能点动就行了。这个是加速度,减速度,然后曲线类型, 轴运动的曲线类型是大概是有 t 型的跟这个 s 型的,这个对于我们实际的定位其实选两种都可以,其实没有太大的区别,你要如果想要运动的平滑一点,慢一点,他就会你就选这个 s 曲线, 如果你想运动的稍微快一点,他就做这个 t 曲线就行了。就这里这里这里会有这个一个实曲图啊,一个实曲图,大概这个样子,大概就是 t 型曲线,然后 s 型曲线,嗯,这里没有,我看我能不能找到, 嗯,看能不能找到, 嗯,这边没有画出 s 曲线,就 t 曲线,大概就一个上升的一个加速,然后然后速度到达, 就以这个为为举例啊,他前面是一个斜斜线的加速,加速到了目标速度,然后保持目标速度运动,然后停止的时候是也是走一个斜线减速,这个就是 t 七线, s 曲线大概就是这里会有一个弧度这样的,这样绕一下就先有点像战旋波这样的,绕一下减速也是类似的,相对来说会更平滑一点吧。 我们接着往后看,然后盲,然后后面是他的输出啊,也是有 一个盲啊,中指啊,错误,错误代码就是每个指定,其实啊,右边的输出都差不多,那个就是好多都是通通有的,什么盲啊?执行中指啊,错误啊,错误代码。 好,这个这个讲完之后我们再讲下一个网络,网络四,它是一个绝对运动的指令,就是木 a b s 就绝,绝对移动,什么什么,大概就这意思, 就是我们这个绝对定位是由外部的,这个绝对运动的引脚,就这个,这边写的是 m 四,由他来驱动轴,前提是轴要在使能轴没有点停止,没有点启停, 再叫个不再回原,我们才能驱动我们这个绝对定位的指令。绝对定位的指令,其实每个指令都大差 五叉,嗯,大概会写一两个,其他指令都是都是一样的使用方式,在这里这也是绝对运动指令,但是他除了绝对运动还有相对运动,我这个功能快是没有做, 没有做,他有很多种那个运动方式最基本的就是绝对跟相对,还有各种的那种,还有更高端一点的什么插补那种。那种运动 我先讲一个最基本的,绝对运动可能用的是最多的,绝对跟相对用的是最多的。讲一下绝对 绝对前面的也是一样的,要填轴名称,要填目标位置,目标速度,加速减速,还有曲线类型,刚刚的结果一样。还有这里是嗯,他运行的模式, 绝对运动也有一个运运行的模式,然后目标位置到达的标记蒙标记终止执行跟故障程序这边的话,我这边轴号也轴号都是一样的,轴号都是通过外部输入的,这个轴号所有的这个快都是统一填这个 定位的位置,就是跟那个定位的位置也是外部输入的。因为救狗运动是没有目标位置的,救狗运动就速度就行了。 然后定位绝对运动跟相对运动都是有的,都是需要设定一个定位位置啊,设定单独的定位速度,这个速度跟刚才救口速度是独立的,然后加速度跟减速度 也是跟旧狗独立的,旧狗我是写了固定值嘛,但是嗯,绝对运动一般是用在 设备的自动运行,他的轴自动运行那里,然后他的那个加减速最好是要可调,就放在外面做参数输入,就每个轴的这些参数可能设的不一致。 然后后面有一个这个填的是 k 零啊, k 零零的话是 t 零的话是 t 曲线,一的话是 s 曲线,这个其实零音都无所谓,设零吗? 然后这个是模式井环形模式下指示,但这个我们选了一个最短距离, 就是大概的意思,就是说他定位的一个,看一下他这里面有没有说明啊?嗯,也是一样的,就是不管 home 啊, joker 啊,绝对运动啊,都是需要前提条件都是要 m c power, 就是要四伏上电。嗯,看一下啊, 啊,这里来了,这里是这个就是 t 曲线,刚才已经讲过了,这个就是 s 曲线,就是五档 s 曲线, 他是做这种稍微有点弧形的,这种比较平滑的,那个加减速,这个用两种都可以吧,感觉没有太大差距。然后刚才这个说环形模式一下,他是怎么怎么去定位的, 我们刚才指令内选的是 k 二,也就是说最短距离就是说起始位置怎么运动, 到我们的个目标位置,他可以这样走,也可以反向走,嗯,可以正向走,也可以反向走,我们选的是二, 我们选的是二,嗯,哦,不,我们选的是三,就是等于二的时候,第一条他是第一条是等于零,第二条是等于一,第三条是等于二,我们选的是这个, 就是不管怎么样,我们起始位置跟我们目标位置哪个距离短我们就走,我们就往哪个方向运动,大概是这个意思,然后前面的都是说,嗯,正向或者固定正向,或者固定反向,我们这个第三个就是取取最短的 绝对运动的快,也就也就只有这么多了。然后停止,停止指定,就是说我们有停止, 并且轴在使能的时候,我们就就能执行这个停止指令,就是外部点击停止,并且轴已使能。如果轴没有使能啊,就是就没有必要停止了,因为 轴没有屎呢,他是不可能做运动的呀,电机都没有,里面都没有电,没有上电,没有驱动,没有给电机上电,他肯定是运动不了的, 但这个使能中,其实可加可不加,加上也没事,就是给他限制一下 mc stop。 其实这个指令一点都差不多都差不多,我找一下, 找一下 m c 的 store, 找到了,它就是给轴停止的一个指令,然后也是一样的,输入轴的轴的 id 或者轴名称减速度。 因为你要停嘛,所以需要设定减速度。哦,这边的减速度用的就是自动运行的减速度,就跟那个啊,就是绝对运动的减速度,然后停止的类型曲线跟那个一样,然后停机完成的标志,好, 这个是轴停止,轴急停。轴急停区别于轴停止,就是轴停止,就是相当于你运动的时候你给他打断让他停掉, 但这个停止是那个依靠你设定的减速减速度来停的啊,急停的话他就不依靠你设的减速度来停,就是让他让电机很快的停止下来,就是急停。 嗯,作用就是说某些场合,某些需要。呃,涉及 遇到那些比较安全需要,需有有安全需求的场合,你让轴,比如说你拍了急停,或者说你什么保护被遮挡了,比如说保护光刹啊,光电那种,被遮挡了你就必须让轴立马停下来,你就可以用这个急停。我找一下急停的那个 说明。嗯。 g t 今天在哪里啊?在这里 就机听指令,作用就是紧急停,紧急停机给收,然后他。 嗯,外面的参数也是都是他只要指定一个轴号,只需要指定一个轴号,然后后面就是停机完成,跟这些标志跟故障代码,这个没啥讲的, 作用就是给给磁伏电机机听,然后复位,复位指定,这边驱动也是靠外部的这个输入啊,有这个 reset 他就可以执行这个复位指定。复位指定 其实也很简单,他就是比如说我们遥控指令报错了,或者驱动器报错了,可以用这个复位指令来给他复位,找一下复位指令的 m c m c b c m c you set 啊,在这里就在最前面就是故障复位,只需要指定一个轴号就好了,然后复位完成 这个没啥讲的,然后后面这个当前位置读取,这后面我都可以跳过,不讲了,就 读就读。驱动器的位置也是一样的,只需指定这个轴号就能读。然后读到的位置啊,放到我们这个,放到我们需要的计算器当中。我这边是建的是一个变量 啊,输出类型的变量,其实是在这个上方的这个 i b 块的变量里面,嗯,输出是在 o e, o e 就是输出型的,嗯,浮点 这边当前位置就是这个 oe pose, 就是读取他的当前位置,这读取他的当前速度 oe speed, 还有读取他的当前例句,这有个读例句的指令, 这三个指令其实也就作用不一样,使用起来就完全一样。然后我们再写了 一个指令执行错误,就是所有的指令不管这个是取反,取反,后面再取了一次反,就是当中任何一个 on, 任意一个为 on, 我这边就会 set 一个错误,就在我们 ib 快外部这个错误就会置为 on。 然后什么时候复位呢?就是执行轴复位的时候,我们会给这个嗯错误给他预赛的定好这个是读取这个轴的故障带吗? 读取其实就是读取那个驱动器里面的那个,呃, ppu, 就是 就是就是,其实说明白,就是驱动器有一个存储故障代码的计算器,我们就把这个计算器读出来,就这个意思。 这后面就是,嗯,不管是我们后面这两个,我们读到的这两个 故障代码都都有任一个有值,我就认为轴报警,否则如果他两个都等于零,就是没有报警,大概就这意思,整个 i b 快就到这就结束了。
122工控_徐工 04:07查看AI文稿AI文稿
04:07查看AI文稿AI文稿信捷 p l c 视频教程一 forget 总线常见问题即解决办法一,先来看第一个 在我们使用 easy cat 的轴的时候,轴配置里的指令通道为 easy cat 通道,也就是这里的配置。 当他选为 eatcat 时,必须要确保 eatcat 轴确实地已经连接,并且切到了 o p 状态。这个在我们之前的课说过,就是 o p 状态表示是已经通讯的状态, o p 状态是在这这个 either 开的配置界面的状态机,这里可以看到的,要确保的是所有从站都切到了 o p 状态,就是它的通讯已经建立了。如果说通讯没有建立,就是它还属于 pro p, 或者说是其他的不是 o p 的一个状态通,这个就是没有通讯,没有通讯建 的状态。如果这时候去执行指令,指令会返回错误码一零五六,一零五六,这个错误码的含义表示就是主债与存债的通信未建立。 我们来看一下大概是个什么效果,例如这里我们看一下我这里的轴配置是 pro p 的,就是此时它的通讯是未建立的。我如果说用一条指令, 我导通一条使能指令,这个时候使能指令会返回错误码一零五六,也就是我们刚才说的主站与存站通讯未借例就是说到了这里的 这个东西的影响,因为他们 eatcut 他作为 eatcat 存在没有建立通讯,那这个时候我们就通过将配置写入重新激活,激活完成之后存在的状态变为了 op, 也就是这个时候已经通讯成功了,再来导通他的事, 这个时候齿轮就是能够正常打开了,也是这边的状态会变成了去了状态也没有发挥错误,就正常能够打开齿轮了, 这是一个比较经常会见到的一个问题。我们再来看下一个 控制轴数,轴位状态地址,轴字状态地址的设置,这个在我们之前讲轴配置的那一章里讲过,在轴配置系统设置的这个界面,点开界面系统设置之后,可以看到这 这里有控制轴数,轴位状态地址,轴字状态地址讲他的离线值和再线值,这里如果说,呃这里的控制轴数和轴位状态地址轴字状地址发生了变化,会对整个使用会有一定的影响, 我们来看一下具体是哪些影响。首先是控制轴数,如果说控制轴数大于了实际的连接轴数,就是这里的这个控制轴数,这个值比实际连的轴数要大,或者说比我们程序里的指令的那个轴数要大,他会返回错误码,一零四零 就是轴缩影超限表示,就是指令的轴号超出了我配置的总共的轴的个数,那就会返回这个一零四零的错误码。而当我 我的那个轴位状态地址设为了其他的值,也就是刚才的那个地方的地址,那个地址是两万,我也可以通过 sfd 的八幺四或者八幺六就是轴位状态,其实地址和轴字状态,其实地址他们对应的计算器 这里也是可以也是可以修改,如果这个植被修改,那影响到的就是我们之前说到的轴状态线圈和轴状态计算器。从 m 两万开始以及 d 两万开始的线圈与计算器 分别代表的是走运动控制过程中使用的一些线圈状态,或者一些当前位置、当前速度这种的计算器。 如果说这里的两万被修改了,那这里的占用地址也就会修改,它变为 m 零或者 m, 其他的根据你这里设立的值来。
64武汉德智自动化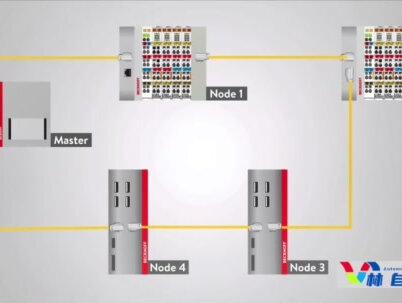 04:02查看AI文稿AI文稿
04:02查看AI文稿AI文稿大家好,我是凌云。我们都知道 if a cat 是控制自动化技术的以太网通讯协议,它是基于以太网的技术,专门为工业自动化而开发的。 ether cat 使用标准帧和 i triple e 八百零二点三亿钛网标准中所定义的物理层。它解决了工业自动化中的一些特定问题,比如快速响应时间、每个设备的最低数据要求和实施成本。 仪态网对许多工业应用来说并不是一个实用的解决方案,因为它将数据帧分别录由到大量单独的地址,其中数据可能只是一个简单的寄存器,用于获取实时模拟读数。 这种节点特定的路由需要大量的带宽,因为数据包只在主节点或客户端请求数据时移动。相比之下, ether cat 与以太网使用相同的物理层和数据链路层,但协议有所不同。如前所述,以太网能够通过许多不同的节点路由数据以主从配 位置发送和接收请求。而 if a cat 中主节点发送数据可能只发送一个针给整个节点网络,该针将通过每个节点传递。主节点是控制者,也是唯一允许发送数据针的节点,然后网络中的每个节点将数据针向下转发。 这种方法有助于确保实时操作并避免延迟。每个 intercat 设备在其硬件软件中处理与其相关的数据帧,并在数据帧通过网络时将其数据添加到其中。 infocat 网络不需要在网络中使用外部交换机。每个 infocat 设备通常有两个以太网端口,第一个端口是接收端口或前一个节点的电缆,第二个端口连接到网络中的下一个节点。在设备的硬件中及时处理数据是 infocat 的一个主要优势。 尽管设备在数据真中添加数据会导致一小段延迟,但与以太网网络中使用的多个以太网针相比, if your cat 通常 常只有一个数据流,因此延迟大大减少。这个优势也可能成为一个劣势,许多设备可能无法处理这些大幅缩短的循环时间,因此 if a cat 网络可能需要减慢速度以适应这些设备。由于 if a cat 网络可以减慢速度,所以可以再次将这个劣势视为优势。 if for cat 还采用了分布式时钟系统,这种方法可以实现低抖动,无需额外硬件,并满足工业自动化中所需的同步重要性。 当 if a cat 针通过每个节点时,节点会将接收消息的时间戳添加到其数据中。每个节点在接收消息时都会添加时间戳,然后再针返回节点时再次附加时间戳,再返回主节点的路径上。 主节点通过每个数据针传输计算时间戳数据,从而得到每个节点的准确延迟。通过 ether cat 固有的环形拓扑结构,这确保了每次数据传输都能获得越来越准确的数 数据。这是由于分布式时钟机制所实现的,这是 ever cat 的优势之一。另一个优势则体现在网络拓扑结构方面。在 ever cat 网络中可以使用许多不同的网络拓扑结构。 由于他利用了以太网的全双工层,一分 cat 从战将自动返回真给主战。如果检测到下游存在开放端口,则自动终止以太网的新型拓扑结构简单易用,但一分 cat 网络可以通过树状、现状等方式扩展得更远。 它还可以在使用以太网硬件的现场总线类型系统中使用,为您的 ifrcat 网络提供了极大的灵活性。考虑到 ifrcat 的固有环形技术,您可以想象一下,在环形拓扑结构中,连接网络将是一个勇于的系统。 由于它本身就是一个环形拓扑结构,如果可行的话,连接主战的第二个端口将为网络断开的另一侧提供。勇于应该对每种拓扑类型进行研究, 已确定哪种解决方案最适合您的应用。总之, if a cat 是一种带有一些非常好的附加功能的以太网。由于设计时就考虑到工业领域的需求, if a cat 与标准以太网相比具有很多优势, 其中包括大幅提高的速度,减少的数据流量,降低了实施的硬件成本,以及由分布式时钟机制带来的越来越准确的数据。这就是为什么说 if for cat 是一只非常出色的猫的原因。 因此,这种技术在控制工程师中越来越受欢迎,因为他提供了一个实时且稳定的高速网络,能够用于工业控制领域。 ok, 今天就分享到这,喜欢就一键三连,关注我想系统的学习 plc 及相关知识找我参加培训,我是凌云,下期见哦!
1784林沄PLC自动化培训 21:52查看AI文稿AI文稿
21:52查看AI文稿AI文稿笨鸟先飞和陈老师学工控,今天这节课我们将给大家分享一下会穿会穿的 excat 总线的配置方法。 二零幺九年的时候,那是我第一次见到 h k 的总线,那时候我还在宁德时代端正电器工程师 复制一些设备的一个验收的时候,我去到很多个不同的厂家验收啊,转角机啊,注壳机啊,隧道炉啊等等很多种不同的理念设备。 我发现现场很多用这个会窗的四伏电机的,而且它上面都是用了网口啊,一个四伏插,另一个啊,一一串一连串插下去,然后最终就拎到这个啤酒机上面去,我感觉 它的接线很方便啊。我也问了现场的一些工程师,哎,你们为什么都挑了这个汇川的这个式服啊?现场的工程师说,哎,他支持 hcc 总线。 那什么是 excat 总线?为什么我们要去使用这一种通讯协议呢?它有什么优点呢? excat 是一种开放式的现场总线,基于以太网,它主要应用于自动化控制技术, 他的传输速度非常的快,安真以太网最多能够实现一千八四百八十六个字节的数据交互,这些数据的交互呢,耗时仅需要三百微秒。 另外一个他的木线非常简单,只要一根网线就能够把所有 所有的四倍串联到一起,而且它的软件的配置在会窗的 p o c 里面也非常的简简易。 第三个,他的同步抖动非常小,就算是一百个四伏轴的通讯也是非常快速的啊,他能够实现这个同步偏差一微秒以内。 另外它连接的数量比较多啊,对比我们 p p o c 的脉冲控制啊,我们比如说三零为主啊,三 u 的 p o c, 它最多能够有三个脉冲轴的输出,而如果你选择会穿的一个 e g 以及五百系列的这个 p o c, 它单个 its cat 的轴最多就能够实现七十二七十二轴 的这个控制,而且它的硬件成本非常低啊,只需要一个几百块钱的 p o c, 我们就能够带动起这一个 h k 的它的这个通讯协议。 好,那么这个就是我们为什么要去用这个开始总线的一个原因啊。接下来我们来看一下这一个轴信息的一个配置啊,首先看一下硬件的一个连接啊, 控制器,我们现这个案例里面选择的是 e g 五零幺这一个 p u c, 五开头的这一个就是支持 sk 的总线啊,三开头就是不支持。 然后我们现假如说连接了两台这一个驱动器啊,那么就是把 excuse 的总线插到另一个的输入口 啊,另另一个的输出口接到第二台,然后我们的这个四伏电机,它的这个 极限啊,原点他都接到这个九针串口子上面去啊,那么我们可以通通过这张表可以看出来,他的这个正极线是啊 v i e, 然后负极线是 vi, 二圆点的信号是 vi 八啊,那么这几个信号我们要接,其他信号可以不接啊,包括这个四伏的这个死能,四伏死能我们可以直接通过软件里面去控制就可以。 好,那么把这三个信号一对接到这一个平,这个滑台啊,车杆滑台里面啊,就是这样的,然后这个四伏电机跟这个驱动器的两 连接,我们这里就不展开啊,因为比较简单啊,好,接下来来看一下软件方面的配置 啊,这个是我们新建这个程序的这一个导航栏,我们需要在 it cat 这个位置啊,右键 自动扫描啊,此时我们的 poc 必须要先连接上电脑啊,要啊,他能够跟电脑完成通讯才可以选择这个选项啊,自动扫描啊,右键自动扫描,然后呢,点击 这个开始扫描,他就会把我们连接起来的这个四伏电机给扫描出来,或者说你连接的是别的一些设备,那也能够通过这个开始扫描给他识别出来啊,他会自动识别,我们选择更新到主泰啊,此时就会刷 新过了。好,我们来看一下这个这个软件里面啊,实际的这个软件里面,如果你是没有这一个 p o c 的话,那这个位置就更新不了, 扫描不了啊,他会显示未联通啊,所以我们要有个 p o c 才能够在这里去刷新啊,没有 p o c 的话,这一个字幕操作操作不了 好。然后呢,第二次,第二个,我们要在这一个运动控制轴这个位置,右键点击添加轴 啊,那么他就会给你添加一个轴出来啊,这个轴的编号是零号啊,那我们就在输出设备的这个位置啊,基本设置里面, 输出设备这里选择我们刚刚在 if cat 总线里面添加的这个事故电机啊,选好之后 就可以对四伏电机进行测试,我们可以通过双击这个软件这个位置,然后呢啊再点监控,进入监控,然后进入在线的调试这个界面, 那我们可以点击进入四伏调试啊,此时我们的 p o c 还有四伏应该是要跟电脑能够连接上的, 之后点击使能,那么使能之后呢,链接你手动就转不转不了了,你就可以手动去用这个 drag 加还有 drag 减去控制链接的正反转,可以通过这边的 这个输入框给他设置速度,我们也可以用绝对定位相对定位去对他进行控制啊,那么下面这里 你可以输入我们的速度以及目标的位置,然后选择对应的控制方法,点击开始,那么他就会自己动作。好,那么这个是链接的一个测试调试的一个过程。 好,那么接下来我们来看一下这个四伏电机的一个参数说明啊,那么在这个轴轴的信息里面,我们点进单位换算的设置 啊,首先是要设置一个美妆脉冲数,这边呢是用十六进制显示的一个数啊,我们也可以勾选把它显示为十进制,才更符合我们的这一个数学的这个标准啊。然后 再往下有两个选项,我们可以选择面数装置,那么他就帮你添加了一个链子扯轮笔,那么我们也可以不用不要链子扯轮笔,这就那就选择上面这个选项, 那么要设置的是这一个单位的移动量啊,公路台一圈的移动量啊,是多少个?这个 unity 啊,那么这下面有条公式啊,脉冲术 会等于这一个美状脉冲啊,就上面设置的这一个啊,去除以工作台一圈的移动量啊, 他移动了多少毫米啊,然后再去乘以这一个移动距距离啊,那么根据这条公式,我们后续去做一些计算的时候啊,就就可以使用这个公 啊。好,这是另一个页面的这个参数啊,再往下这个页面的参数我们要设置的啊,另一个是增编码器的一个类型啊,如果是增量的,我们选择另一种,如果是绝对是编码器,那我们就选择另一种啊, 哦,这里应该是选择增亮色的啊,然后模式的设置,我们是线性模式还是旋转开旋转模式啊,旋转一般就是按照角度的,那么我们这个滑台啊,明显就是一个线性的一个模式啊, 再往下我们可以设置这个软件的软极限啊,超过了多少范围,那么他就会不不再动啊。再往下比较重要的一个东西啊,就是轴的速度,他的最大速度,他的 最大加速度,还有 drag 的最大速度啊,做这里做了一个限制啊, 然后下面是扭距的一个限制啊,一般先按照默认去设置就可以啊,然后呢,硬件的逻辑限位,我们要给他设置是正逻辑还是负逻辑, 正逻辑呢,就是上升也有效啊,负逻辑就是一个下降也有效啊。好,这里我们先不展开啊 啊,那么参数的话基本上就这些啊,基本上你按照默认的这一个给它打勾就就能够弄起来了啊, 然后再往下我们来对这个轴进行 drag 控制啊,让这个轴动起来啊,手动起来 drag 这 前我们需要对四伏电机去进行使能啊,使能,我们因为刚刚接线的时候是没有接使能端者,那么需要用到一个使能的指令, 省能的指令,还有这个 drag 轴的这个运动控制的这个指令都在软件的工具箱啊,右边的这个工具箱在 catch 的这一个基本指令里面, 那我们可以把这个模块给拉过来啊,就会显示到这里,这里呢,我填了一个 m 一百作为使能,那当 m 一百导通的时候,这个链接就会使能,就会动不了,就能够去对他进行定位控制。 下面这里呢,我选择的是 k 零啊,填的是 k 零,那表示的是零号轴啊,我们记得刚刚添加的, 走在左边导航来,那么这里呢? x 啊,这个是零,那你也可以把这个英文单词啊,整个的抄进去啊,那也可以啊,或者说跟我一样填 k 零啊,填 k 零就比较省事一点了啊, 好,那么这个是一个这个使能啊,然后面呢,这些是他的一个 一个银角啊,一个忙碌啊啊工,工作中啊,错误啊,还有这个冒错的代码啊,这这个这些银角,我们等一下再来展开啊,因为所有的这一个 定位控制,也就是开头定位控制的这个引脚都差不多,我们等一下到后面讲到这个绝对定位的时候啊,再或者是圆点回归的时候,我们再来展开来讲这些这个引脚啊,那么这里呢, 我们只需要给 k 零还有 m 一百他就能使呢,其他的可以不填,先不管他,然后再往上面啊,这,这个是一个 drag 手动的一个控制程序, 那当我们 m 零开始它脑通,那么它就能够手动去动作啊,然后下面这个填了个 m 十,那表示的是症状 m 十一呀,这个是反转,就是 m 十倒通,他症状加加,这两个结合到一起啊, m 零加 m 十是症状, m 零加 m 十一是反转, 然后这个快,它上面的这一个引脚啊,跟跟下面的这一个是一样的啊,就填他的轴的编号,我这里也是填了一个 k 零啊,表示零号轴啊,运动轴,我们如果 连两台,那你可以在右键去添加轴啊啊,他下一个就是一号轴,二号轴,按照这个顺序去排下去啊,好,这个是一个 drop 控制。 好,接下来我们来看一下这一个相对定位的一个控制指令啊,那么我们这种控制的指令呢,我们只需要用一个上升沿的信号去触发就可以啊,这个快,同样的可以到右边的工具栏里面去把它调出来啊,这里我就不给大家再展展示怎么调了啊? 好,那么他左边有几个引脚,右边有几个引脚,我们来看一下这些引脚的一个信息啊,第一个是一个轴轴编号啊,如果是另一个轴啊,零号轴,那我就填 k 零啊,或者说直接输轴的名称啊,在下一个例子是他的 距离啊,这里写了一九十啊,那么这是他的距离,再往下是一个速度,那么这里呢,我们给了一个一一千一,那就是 一千一里面的数据作为他的速度啊,再往下两个是一个他的加速时间以及减速的时间啊,这里都设置为一千。 最后面这个是一个曲线的类型啊,应该就是他的加减数的这个曲线的类型啊,我们可以按照默认就可以啊,不停他。 好,右边的这几个引脚呢啊,另一个是动作结束啊,这个是一个动作正常结束的一个标志啊,那么 m 五零五他就会导通啊,当轴在动作中,那么就会忙碌信号他就会导通啊, m 五零六就会导通啊,那么下面这里 还有一个命令停止啊,命令与终止,那么这个呢,跟动作结束这两个是不一样的,命令与终止是受到某些控制的情况导致他停止,而这一个另一个呢,是他动作已经完成之后已经结束才会导通啊。 最下面两个引脚呢,是一个错误的一个输出,还有他的错误代码,错误代码我们最后面再讲啊,最后面我们有一张表,可以查阅我们这些错误,他的这个解决的方法啊,以及他的这个意思啊。 好,那么这个是相对定位控制啊,他的这一个快啊,他的一个引脚的说明, 其实很多时候我们只需要把左边的这些菱角填好啊,右边呢,我们只需要一个动作 结束了,这样的一个标志位啊,其实就可以控制啊,其他很多都可以暂时先空着也能够去控制啊,他就显示为这样的一个状态啊,空了一个这样的状态啊, 好,那么接下来我们再来看一下下一个指令啊,圆点回归,那圆点回归呢,我们首先需要在运动控制轴这里面啊,有个圆点返回的设置,对他进行设置啊,那我们这里呢是圆点信号要选择使用,然后呢这一项信号使用 腹线限位使用,因为回原点的过程中,他如果是在靠近腹极线的位置啊,那他到时会往往副方向回原点的时候会直接碰到腹极线,那这个时候呢,我们就要规定一个腹线位,到时候让他自己走回去啊,所以这个 下面的动作里面等一下就会讲,哎,他碰到负极线的时候是什么样的动作啊?那么你使用了负极线之后呢?他正极线就不会使用,那到时候就只能他启动回你的时候,他一开始是先往负方向回的, 如果你这个负极线不使用,选择正极线去使用,那当开始直行回原点的时候,他是先直行回往正方向的回原点 好,然后呢下面的这个圆点的这一个回回圆的方式,我们选择的是回零十四号, 你选择不同的回音方式的时候,下面软件里面下面的这张表他会自己变化,要告诉你他的动作的过程,那么我们根据这张实序图,我们就能够知道他是怎么回的 啊,我们来解读一下他这一个回音的方式啊,那么有几段线,其实就有几种回回音的类型啊,那么我们来看一下最简单的另一种,下面这种, 这个是圆点开关信号,那这个点在这里表示我们开机的时候就刚好是处在圆点的上方,那么此时它以 l 负呃不负 l, 那么这个表示的是离数啊,圆点返回的速度啊, 还有一个接近零点的速度,那么这个两个速度,这个是一个相当是一个 h 高速,这个呢接近圆点的返回速度呢?这个是低速,就是 l, 这个图里面的 l 啊负 l 啊,好,那么当它处在圆点上的时候, 他就往负方向走,以里数的这里设置的这个里数去走啊走,直到碰到这项信号链接的这项信号,他就会停止,把扯点扯点设置为圆点。 好,那如果是在啊圆点的右的左边啊,左边快碰到这个负极线了,好,那么此时他就先以高速的速度回,回回,直到碰到啊负极线这个信号, 他就会降低速度,然后反方向去加速运行到最高速度啊,直到碰到原点信号就降低的速度降到零,然后呢反方向慢速走,走走走走,直到碰到这项信号。马车位置是 作为原点啊,还有第三种情况,这个位置他的位置在原点信号的左边啊,那他就往右边回,往复方向回,直到碰到原点信号的时候,把速度降低到低速啊,一开始是高速啊,碰到原点降低为低速,再慢慢 回,直到碰到这项信号就停止车位,这是作为圆点啊,他这个就是他的动作过程,那么触发怎么来触发通过这一个圆点回归的这个指令啊? mc home 啊,这一个指令就是一个回圆点, 那么他的引脚非常简单啊,前面,后面这些我们刚刚讲相对定位的时候已经讲过了,那么重点就是这一个,那么这个是回原点完成啊,那么 m 五零三 这个点到数据会导通啊,然后这里呢是轴的编号,我们填 k 零啊, 好听啊,这个回音点啊,就就这样啊,主要是这个回音点的回零方式这里有很多种,有好像有三十种,总的这个回零的方式,那你要一个个去看啊,他到底是怎么回的啊? 很非常灵活啊,就算你没有原点的时候,你原点信号没有的时候,他也能够自动去回,只不过这里面可选的方式就不一样啊, 好,再往下是一个绝对定位控制的这一个快啊,那么他其实跟相对定位的快是一模一样的啊,是一样的,只不过他填的这一个位置信号是一个绝对坐标啊,那么这里我们就不展开啊,那该 知道这个快,他的这个名称就可以啊,然后最后面当我们这个通讯出现故障的时候,我们要学会对他进行处理,那么就有就需要获取他的故障代码, 那么首先另一种,当我们执行责令的时候出现故障,好,那么可以通过右下角填的这个计算器啊,它里面就保存有我们的故障代码。 第二种可以通过软件的故障诊断功能,他也能够诊断出来啊,这一个对应的故障代码,同时里面有故障的一个信息啊, 这这个八二零四,他的类型这个信息是重账,类型不匹配,那就选错账了,我们去一般就 更改啊,下面这里这里呢就有解决方案啊,检查网线是否插反,或者说实际的设备中是否匹配啊,选,选错了吗?啊, 当然除了这一个,我们可以有张表啊,在手册里面有这张表啊,我们刚刚的那个故障,这一个 八二零四啊,那么在就在这个表里面我们也可以查到啊,八二零四啊,同样类型不匹配啊,解决方案, 其他代码呢啊,就在这两张啊,这这这两页的这个错代码里面去找啊,就能够去解决这个通讯的一些问题啊,这个课程最重要的就是让大家 去入门啊,学会初步的掌握 it to cat 通讯的应用,更加深入的学习啊,需要大家自行去摸索。好,那么这节课就到这里,谢谢大家。
2240工控笨鸟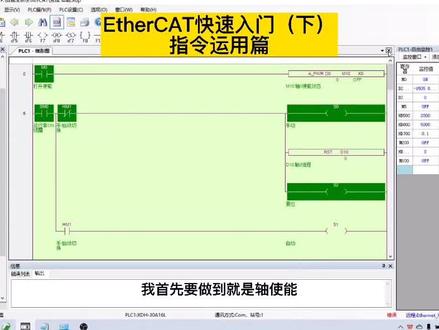 09:56查看AI文稿AI文稿
09:56查看AI文稿AI文稿我首先要做到就是走死人,走死人我们这里做了一个啊,常开的一个输入指令,走死人使用的是一个 a 下横线 p w r, 在参数配置里面可以看得到的, 第一个是我们的一个输出参数,这个输出参数他就是一个相当于我们作为一个报警码初步码,当我们处于一个 非死人的时候啊,他就是一个 boss 啊。当死人成功以后啊,让我们看一下这个纸,我在充电器上面操作一下,把死人打开,然后我们重新监控一下 他,这也一个自动的状态啊,这里就显示了一个处啊, 状态也可以通过我们指定表里面去监控他,包括监控有没有死也行。 然后我们指令表里面有讲到,包括我们轴零是 m 两千加五十乘以轴号啊,我们轴零的话他读了一个使人状态的词,我们就读这个 m 两千这个位 这里,然后如果是周一的话呢,那应该地址是多少?就是那么两千零五十,那周二就是那么两千零一百。 好,首先我动,我们这里做这个手动正转和手动反转,这个手动正转它采用的是 六十四位双进度,一个古典的一个传送。 et m v 只要是一人看的这个定位指令中都 必须的十六思维辅点的这一点一定要区分好,包括我们触摸屏上面做的这些什么速度设置的纸啊,监控啊,都一定要选择双字辅点,我们这里做了一个正反转的一个指引。好啊,这个 etm v 他就是将我们的触摸屏上面设定的这样一个目标纸 啊,传到我们的一个 hd 幺零八年那个目标速度里面手动速度 啊,当我们做反转的时候,我们采用一个双字符点乘一个负一啊,改变他的这一个账户关系,可以让他的一个方向的打开与否,他是一个 a 下横线 v e l v e, 对吧? 到这里面我们可以看到一个指令参数配置,这个配置呢?这个指令又叫速度控制运动 啊,就是这个指令以设定的速度持续运动,所以说我们做这个指令的时候,配置完以后,就是说我们这边上身也出啊,他正转也好,反转也好,我们下面一定要做一个多股啊。首先就是我们的一个手动速度要起立幺零八年,是吧?他 占用了一个幺零八年到幺零九八这一组,所以后面的写其他的定位指令的时候,相关的计算器不要和这一块重复加加速度,我们加加速度一定要大于他的加速度和减速度, 这一块一定要注意一下,不然的话这个速度到时候起不来的啊。出马 hd 二零八零二零八年,他根据我们计算机里面的值的一个变化,有相关的一个错误 提示。然后再一个就是 m 幺零八零,嗯,占用了一个五个位啊,嗯,就是像完成啊,或者忙碌啊,激活啊这些一些报警错误状态呀,我们都可以取这些位状态的进行一个实时的一个提示,触摸屏上面后面这个就是我们的一个轴号, 然后我们看一下,嗯,关于这个手动效果啊,速度控制运动指令他我这里总结了一下,注意点应该有两方面, 第一方面就是寸动中,就是我们手动不管是正转也好,反转也好,寸动中的时候 我们做一个寸头正反的保持,一定要做一个保持的标志位,你看我这里正传有一个保持标志位反转啊,也有个保 指标,这位分别是 m 幺二零年、 m 幺二零幺,他的好处就是当出现我们碰到实际的一个物理极限的时候,我们可以马上去这个标志位进行一个十多步啊,十多步当前走啊。第二个注意点就是 我们这是寸动上上眼,是触发他一个手动运动,我们要取他的一个寸动的状态下降眼,我们这里写了一组 下咽炎,当我们手松开的时候,马上要停,停止他啊,要停止相关的这个 这个走号正确的停止,就是我们也是要输入啊,一个参数配置的啊,包括我们的一个,比如说我这个输入参数 一号是第一百四,第一百四代表我们这里是啊,这个减速啊,加减速啊,还有停止类型可以选择,我们这里选择减速停止,当然我们可以选择立即停止,就是急停啊,还有个急停并关闭死人, 这都可以通过自己去配置的啊。第二组参数就是我们一个嗯,出马的一个输出状态第二百四 啊,第三个就是,呃,我们的一个状态,包括是是我完全忙碌啊这些啊,进行全部这一系列的啊配置,进行一个售后部停止啊, 这就是我们要注意的一个娘娘方向。刚刚说的注意点,第一项啊, 就是取正转和反转的时候一个标志位,你看我这里,比如说读到一个模拟极限,比如说 x x x 一也好,或者是我加了一个软纤维状态也好,他可以马上直接就是做给他,同时我们做一个批次复位,把我们的一个正反转的一个状态 进行一个复位停止运动的一个错误方式啊,错误方式,我们这里都是支持常开常闭啊啊,或者是上下眼下降眼 啊,这里我们有一个比较指令,这里的比较指令不同于我们常规 prc 的这样一个比较, 常规 p 二 c, 他就是什么大于小于等于大于等于或者小于等于,我们这里的比较执念就是啊, etcm p, 这是属于一个伏点数比较,他的出发方式,支持常开常闭或者是边缘出发 啊,就拿我这一条直径来讲啊啊 etcmp。 然后我们这里有一个比较的一个数据,一是 hd 四千五比较的数据,二是第一两万零四十四, 那比较结果是 m 一千六,他是结果是放在 m 一千六这里面的 m 一千六 他就占用了三个位。比如说 abc, 就是等于大于的时候, abc 就通, 当等于的时候是 m 一千六百零一倒腾,当小鱼的时候是 m 一千六百零二倒腾啊,这就是一个关于伏天数比较,在总线里面的一个 纸巾的运用,他涵盖了大于等于小于啊,这个就是我整体用到来就是作为一个数据的软纤维,所以要用到这个比较纸巾位置清零啊,就是折号清零,就是折号拼零。 之后去你们这里有写到 a w i t y, 写中吧,处罚方式依旧是支持常开常闭上身严 官方的一个称呼,这个执念叫做修改执念轴的当前位置, 然后他的一个配置啊,同样就是第一组 hd 四百, 这个 hd 四百他是一个输入参数,输入参数他同样占用的是一个,嗯,三组计算机 hd 四百四十四点五 输入一个参数的一个提示地址输出,这一个参数就是一个我们的一个输出的一个状态吗?啊?啊?状态是有没有异常啊?包括我们一个实际的一个输出状态是完成或者忙碌或者错误, 这就是我们的一个位置,轻盈的一个一个执念的一个写法,会员啊,会员的话,嗯,相比来说脉冲的变化不大,同样上升也出发采用了一个 zr 轮啊,下横线作为一个区分 啊,电影就是我们一个状态吗?啊?是否有异常啊?那三十占用了十五个位啊 位,然后进行一个最后走号的一个指定, 然后这边我们 作为一个绝对定位,绝对定位怎么做呢?啊?前期呃,也做了一个很详细的解答,这里大概就是讲一讲,觉得因为它相对于我们这个脉冲一样的,只是前期多了一个 a 下横向 dla 啊,第一组参数 hd 五百码目标位置是吧? 啊,然后 hd 六百就是我们的一个目标速度啊,还有一个加减速啊, 再一个就是我们的 m 五百, m 五百就处于一个他的状态是否定位完成我们可以做比较,就是我当前这个以当前这个目标位置到达以后 m 五百他是至昂的啊,最后就是我们的一个执行走号。
 08:10
08:10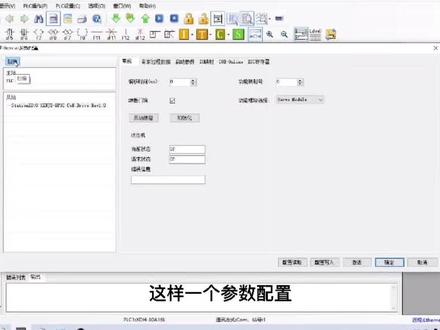 05:03查看AI文稿AI文稿
05:03查看AI文稿AI文稿连接方式肯定是选用一日列头插列头啊,我这里是提前配置好了的,如果提前没配置好,我们首先怎么办呢?要找到我们的这个网络共享中心里面 选择我们的 wifi 啊,更改实配器选项,找到我们这个仪态网啊,索性是吧。然后再找到我们的 tcpip, 这里都是默认了自动获得 ipd 值,我们这里要连接 prc, 肯定要使用下面的 ipd 值,这里的 ipd 值啊,幺九二点幺六八点右点这个后面这位数一定一,不能和这个 prc 段这里重复啊。 幺幺二点六六八点六点六飘写段这边是他这个设备 ip, 我们这边的话可以把最后一位作为一个区分,把它改成点七 时光演法就是默认的,他自动会生成默认网关,那就是默认了幺九二点幺六八点九点一啊,我们点击确定就可以了,点确定他这里会就就就会提示啊,就是有一个相关的网络识别 啊,这里设置完了以后,我们记得在这里选择是一个猎头,然后插猎头,点确定,然后我们选择已连接, 把使用状态把它切换下来,当提示连接成功以后,我们点确定他这有提示的前期的一个配置,首先我们 在左目录数这边找到一个看头,双击他打开这样一个参数配置啊啊,这样一个参数配置, 现在我们这里使用的驱动器来,当然是清洁的,清洁的他自身的就相对比较简单,我们直接扫描就可以了,你看 把这个型号就读出来了,一百三十的一个总先行闭环驱动,如果使用的是第三方的这个总先行的这个驱动呢,我们需要在 prc max 这里添加设备 啊,然后导入设备,找到我们第三方这个电机的这个配置文件啊,把它导入进来,或者是说在我们这个目录素里面 啊,把这个文件夹锁在位置 啊,找到这个文件夹,然后进入到我们医生看的这个文件,再进入到我们这样一个专门的一个配置 文件,把这个第三方的这个驱动器的这个配置文件放在这里面就行了,针对我们使用的细节自身的一个驱动,那我们直接就可以进行一个所谓的扫描啊,躲到我们的驱动器 读到了以后呢,我们将这个配置进行一个写入,他提示写入成功,对吧?然后将进行激活 啊,激活成功以后,我们确定,然后再找到我们的这样一个轴配置。 轴配置你看这里,我们以前我的程序做了两个轴的,这里我们只有一个轴,十九啊,这个轴零,轴一,这个轴零就是我们刚刚添加的这个轴,这个轴要改的那些参数了,就是像一些什么基础配置啊啊,然后一些回原点的,嗯,这些 功能其他的肌肤可以默认像基础配置,我们动哪些呢?包括我们的轴类型,是吧?选择十轴,然后我们的一个确认一下,从账号这个每圈的脉冲数 这里我们都不要去改,他这个是我们的编码器反馈的反馈的一个脉冲术,我们要动的就是这个 全的移动量啊,这个我们要要改动啊,再看一下我们的回圆点,回圆点的一个配置, 复原的配置,我们可以设置一下原件端口,这里可以十二式叉十二,我们也可以通过他的这个 s、 f、 d 八幺六零进行修改。比如说这个只是十,那自然就是叉幺零。然后甚至配一下,配置一下我们的一个啊,回年的一个高速,回年的爬行速度,加速度加加速度这些啊 包括一个这个我们的回年的一个万的方向,万方向就是负向的啊,这些根据我们的需求进行一个,然后并将它进行一个写入。
 04:12查看AI文稿AI文稿
04:12查看AI文稿AI文稿信捷 p l c 视频教程 if for cat 总线轴配置一 首先轴配置界面的打开,我们看一下在这个工程栏,这个工程栏属于我们编程软件的左侧,在我的红框标注的这个上面代代表的是轴配置的界面,点击这个按钮,它会进入我们的轴配置界面, 所绘制界面一开始处于灰色的状态就是无法配置,我们先看它的系统设置,点开这个系统设置,弹出的一个弹窗, 里面包含了控制轴数,轴位状态地址、轴字状态地址、轴字状态保持地址,他们的离线值分别都是零,而在线值是六十四两位, 两万,两万,我分别来解释一下他们的含义。首先离线值,离线值代表的是我们的预设值,也就是想要把设什么值设入到设到这个计程器中,点击写入就是将离线值写到在线值中, 而在线值代表的是 p l c 当前这个参数的实际值,通过读取可以把在线值读到离线之中, 这里默认的零线值都是零,所以我们通过读取把里面的在线值读出来,以防止有误操作,将这里的值都改为了零。 我们可以看一下实际的软件,首先界面打开后,它是灰色的,这里也点不了任何参数,我们点开它的系统设置里边,这里 在线值是一,可以看到这是我之前有修改,他的在线值是一控制轴数,这些都是零。我通过读取就是将在线值读到离线值中,而如果我想要修改其中的参数,我就是在离线值中设置,然后点击显入, 它会提示写入成功,此时它的在线值就会被更改,我们点击确定,这样它就界面就不再是灰色,我们设设置的控制手术也会在左侧显示出来。 然后我们来看一下实际的轴配置界面。首先轴配置界面上方有读取和写入的功能,他们分别包含了三个选项,当前界面、当前轴所有 all。 其中当前界面表示的是将当前配置界面上勾选的参数写入到实际值中,也就是把在线值,把离线值写入到在线值中。 而当前轴是将所选轴的所有勾选参数写入到在线之中, 所有轴是将目前配置的所有的控制轴数,所有的参数全部写入到参数在线之中, 这里无论他是否勾选,都会写入到在线之中。我们来演示一下。首先假设我这里修改了一个美券移动量, 我这里将它修改为一万,修改完之后,它会自动将前面的方框勾选,或者说手动勾选也可以,我们也可以通过勾再再次点击将它取消。点击写入时, 如果写当前界面提示写入成功,就是将我刚才修改的这个值写入到在线值中。而如果我这里没有勾选, 如果不勾选,点击写入,他不会将当前离线值写到在线之中。 所以在使用的时候需要注意,如果点的是所有轴,就是无论它是否勾选,这个参数都会写入到在线之中,这就是他们三种选项的区别。
33武汉德智自动化 05:03查看AI文稿AI文稿
05:03查看AI文稿AI文稿连接方式肯定是选用一只猎头插猎头啊,我这里是提前配置好了的,如果提前没配置好,我们首先怎么办呢? 要找到我们的这个网络共享中心里面 选择我们的 wifi 啊,更改实配器选项,找到我们这个仪态瓦啊, 索性是吧。然后再找到我们的 tcpip, 这里 都是默认了自动获得 ip 地址,我们这里要连接 ps, 肯定要使用下面的 ip 地址,这里的 ip 地址啊 啊,幺九二点幺九八点右点,这个后面这位数一定一不能和这个 prc 段重复啊, 幺幺二点六六八点六点六,而且端这边是他这个设备 ip, 我们这边的话可以把最后一位作为一个区分,把它改成点七。 时光演法就是默认的,他自动会生成默认网关,那就是默认了幺九二点幺六八点六点一,然后我们点击确定就可以了,点确定他这里会就就就会提示啊,就是有一个相关的网络识别啊,这里设置完了以后,我们记得在 这里选择是一个猎头,然后插猎头,点确定,然后我们选择已连接,把使用状态把它切换下来, 当提示连接成功以后,我们点确定他这有提示的前期的一个配置,首先我们 在左目录数这边找到一个看头,双击他打开这样一个参数配置啊啊,这样一个参数配置,现在我们这里使用的驱动器来,当然是清洁的,清洁的他自身的就相对比较简单,我们直接扫描就可以了,你看 把这个型号就读出来了。 db 三 c 的一个总先行闭反驱动,如果使用的是第三方的这个总先行的这个驱动呢,我们需要在 prc max 这里 添加设备啊,然后导入设备,找到我们第三方这个 电机的这个配置文件啊,把它导入进来,或者是说在我们这个 目录书里面 啊,把这个文件夹锁在位置 啊,找到这个文件夹,然后进入到我们医生看的这个文件, 再进入到我们这样一个专门的一个配置文件,把这个第三方的这个驱动器的配置文件放在这里面就行了, 针对我们使用的细节自身的一个驱动,那我们直接就可以进行一个所谓的扫描啊,读到我们的驱动器读到了以后呢, 我们将这个配置进行一个写入,他提示写入成功,对吧?然后将进行激活 啊,激活成功以后,我们确定,然后再找到我们的这样一个轴配置。 轴配置你看这里,我们以前我的程序做了两个轴的,这里我们只有一个轴,十九啊,这个轴零,轴一,这个轴零就是我们刚刚添加的这个轴,这个轴要改的那些参数呢?就是像一些什么基础配置啊啊, 然后一些回原点的,嗯,这些功能其他的肌肤可以默认像基础配置,我们动哪些呢? 包括我们的轴类型是吧?选择实轴,然后我们的一个确认一下重粘号,这个每圈的脉冲数, 这里我们都不要去改哈,这个是我们的编码器反馈的,反馈的一个脉冲术,我们要动的就是这个 尾圈的移动量啊,这个我们要要改动,再看一下我们的回圆点,回圆点的一个配置, 会员的配置我们可以设置一下原件端口,这里可以十二是插十二,我们也可以通过他的这个 s f d 八幺六零进行修改。比如说这个值是十,那自然就是叉幺零。 然后甚至配一下,配置一下我们的一个啊,回年的一个高速,回年的爬行速度,加速度加加速度这些啊 包括一个这个我们的回年的一个万的方向,万方向就是负向的这些根据我们的需求进行一个,然后并将他进行一个写入。
 01:48查看AI文稿AI文稿
01:48查看AI文稿AI文稿信节, p l c 视频教程 esakat 总线 esacat 状态机下面介绍一下 esake 的状态机, 每个从战具有以下四个状态,第一个,初始化状态,在初始化状态下, s, d, o 和 p d o 数据都没有办法进行收发。 第二个运行状态,运行状态下面可以对 s d o 数据对象进行收发。 第三个,安全运行状态,在安全运行状态下,可以对 s, d o 和收发,然后对 p d o 数据进行发送,但 p d o 的收信没有办法通讯。 最后一个运行状态,在运行状态下面, s d o 数 数据和 p d o 数据都可以进行收发。我们一般认为从站在 o p 状态下就可以对 e, z, k 的通讯进行一个正常的启用和连接。 下面我们介绍两种经典的特殊通讯方式。第一个,非周期通讯,非周期通讯指的就是主战通讯周期是不固定的,例如像 s d o 的,以及后面再 c o, e, r 那一功能。 第二个周期通讯,周期通讯指的是 p d o。 主要用于从站进行周期性数据交互配置的一些参参数,通常也是需要实时更新的一些数据,最典型的应用就是运动控制, 运动控制部分的话,对于数据的一些实施要求性会非常高,采取的也是周期通讯这样的一个方式。
34武汉德智自动化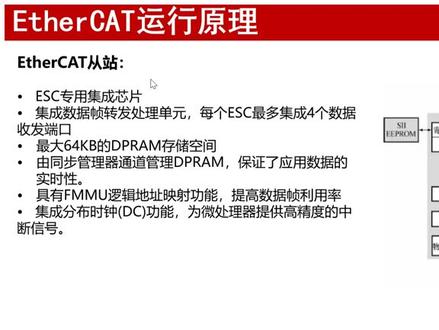 24:491500工控老兵
24:491500工控老兵


