机器人等待信号怎么解决

粉丝1.4万获赞7.0万
相关视频
 00:53查看AI文稿AI文稿
00:53查看AI文稿AI文稿我们把小圆饼啊放在这个输送袋上,当有信号输入的时候,机器人才往下执行,那我们没有检测到信号输入呢,机器人就一直停在这个位置不动,该怎么实现呢?我们需要添加一个维特 di 指令,他在哪里找到呢?我们点击这个添加指令, 在这个选项卡下面,我们看到有这个啊,为他点,我们点一下这个呢就是信号名称,他自己可以定义,可以改名字,我们选中这个一呢,就是当有信号输入的时候,他才继续往下执行,然后呢我们点击确定在他的下方添加一个, 我们来执行一下,看一下效果。当没有信号输入的时候,他就一直停在这个地方不动,那我们给他一个信号, 机器人就往下执行了,为什么没有吸住呢?因为我没有气了,明白了吗?
633机器人小王老师吖 00:36查看AI文稿AI文稿
00:36查看AI文稿AI文稿当我们在操作机械过程中,有时候需要等待特定的输入信号被触发,比如等待一个按钮按下,或是传感器的状态改变。通过使用这个 wait d i 指令可以暂停程序的执行,直到指定的数字输入发生状态变化。 比如这里的魏泰 di 为一,他就会等待这个 die 信号为一。一旦这个 die 信号为一,程序将继续执行后续的指令。例如这个慕菲奥指令用于机器人的直线运动。
 02:15查看AI文稿AI文稿
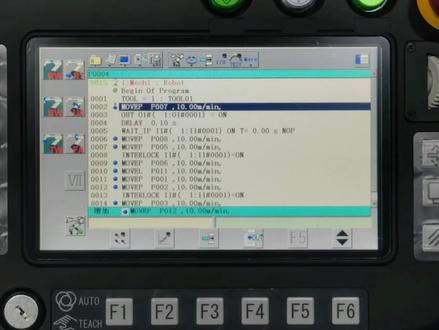
02:15查看AI文稿AI文稿今天我们介绍一个英特洛克的命令,此命令是即使在视角模式下进行跟踪时,为了使夹具与机器人不发生干涉,再确认夹具夹紧 或者解除信号之后,为了移动追踪,判断输入输出状态后,停止机器人的命令。我们正常的命令添加在程序当中,跟踪的时候是会直接跳过去的,只有在程序测试或者自动运行的时候才会执行这些命令。 如果我们在手动跟踪的时候,需要判断某个信号是否到位的时候,再继续往下跟踪,那我们可以添加这个 interlocal 的附索命令。我们如何添加 interlocal 的命令?点击 f 四命令最佳的图标命令组选择流程。 我们这边有一个 interlocal 的命令,然后我们选择对应的端口号,然后我们这边等待输入三围 on, 点击确定添加到程序当中了 vitip 这个命令会直接跳过,他不会执行。我们执行到英特洛克等待输入信号这个命令的时候,他就会提示已被互锁。如果我们确认这个信号没到达,我们机器人也可以往下走的话,我们可以点击上面这个 mr 一菜单,这边有一个 解除复锁。当我们点中这个图标以后,复锁就会被解除。下一个跟踪操作将忽略这个命令,我们点击确定,然后我们继续跟踪,他就会跳过这个命令。当我们程序当中还有一个这个命令的时候,他又会提示我们继续复锁。如果我们需要解除, 我们可以点击上面的菜单解除互锁,或者我们直接关标移动,也可以直接跳过这个命令,如果我们 程序当中必须要判断哪个信号的时候,我们可以添加这个命令,防止我们机器人跟家具或者工具发生干涉碰撞。我们后退互跟踪的时候是不进行判断的, 他可以直接往回退,正跟中的时候往下走,他就会提示已被互锁,这个是我们英德洛克等待输入信号的命令。
155机器人焊接-徐信琳 01:28查看AI文稿AI文稿
01:28查看AI文稿AI文稿博朗特大课堂之等待指令的介绍及使用等待指令可以让机器人在既定时间内接收某个信号来进行对应的程序。我们点击动作菜单等待,这里有五种信号类别,分别是 x、 y、 e、 u、 x、 中间变量和单纯延时。在使用等待指令前,我们需要先熟悉这些信号。等待 x 信号的使用已经详细讲解过了,接下来我们要讲的是第二种信号类别, y, 制止机器人输出到外部的信号, 这里我们勾选一个 vi 零一六的输出信号,勾选通并插入,然后来到信号输出,插入一个 vi 零幺六的时间输出程序,动作时间设为两秒,插入再编写一个机器人路径动作,插入并运行,看看效果,可以看到机器人在向外部输出信号的同时,也触 发了等待信号运行相对应的路径动作。 a u x 信号一般适用于住宿等行业,可以用来接受安全门、住宿机、不良品检测等信号。 中间变量信号是一个虚拟的信号,与 x 不同, x 需要绑定一个传感器,中间变量则不需要单纯延时,一般是插入在两行程序之间,目的是让上一行程序延时进行下一行程序。 以上就是我们博朗特大课堂等待信号的介绍及使用内内容,有任何问题欢迎来到评论区提问,关注我获取更多技术资讯。
 02:59查看AI文稿AI文稿
02:59查看AI文稿AI文稿大家好,因为最近评论区里面有很多人问说这个等待的功能是如何使用,或者如何去进行一个编程的,那今天跟大家说一下这个等待的一个作用 和他是如何要编程的。那这个是我们之前编好的程序,这个是洗完产品横出以后,这个是下行放产品上行的一个动作。 那我们可能会在生产过程中,我们因为有特殊的情况,那我们会在接手横出来以后等待横出来以后,因为某种原因需要等待一个信号 以后,信号给了接手才会下行放产品的一个动作,那我们会在横出以后,在下行前面加一个等待的动作,那这里有个信号等待,那我们现在以一留一为例, 我们就是等待一流一的信号,好将信号插入,这里面有个等待一流一 onon, 就是有信号了他就会下来,没信号的话他就一直上面等等,有信号就会下来。现在我是接了一个启动开关,因为有一些特殊的情况,就是 作业人员在外面进行加工,接手横出来以后,要作业人员加工完后再按启动的时候接手才会下行释放产品。呃,因为我这接的是一个 一留一的信号,按了一留一一的信号就会亮差二十。好,那像我们接接完编程编好了以后,我们现在看下接手的动作是如何的。好,那横出来以后,因为你没有按那个启动开关,他是不会下行的,我们工作人员有可能在是下面操作间组装或怎么样的。那组装完, 那我们超主战人员按一下启动,他就会下行放等待就是这样的一个功能,你不按他是不会下行的。看等待动作里面我们可以点一下,点编辑, 这里有个限时,我们可以调时间,比如我要调五秒,说他在上面等五秒以后,那你员工还没有按他就会有一个报警的功能,有一个他就会报警,限时时间就是一个起到一个他一个等待多少秒的一个作用,等待的一个动作就是这样的。
225注塑机械手厂家-瑞博 00:39查看AI文稿AI文稿
00:39查看AI文稿AI文稿如何让机器人等待一会再开始工作呢?我们需要添加一个威特泰姆指令了,在这边添加指令,在这个选项卡下面我们找到威特泰姆, 这个呢就是等待时间,那他最短时间是零秒,最长时间呢不受限制,分辨率是零点零零一秒,我们这边可以选择一个三点击确定,确定这个呢就是让机器人等待三秒,那我们双击他呢有一个可选变量,我们给他使用一下, 这句话是什么意思呢?如果添加了这个可选变量,就意味着当这个机械臂和外轴静止的时候,才开始判断等待时间,明白了吗?
639机器人小王老师吖 02:11查看AI文稿AI文稿
02:11查看AI文稿AI文稿博朗特大课堂之输入信号 x 的介绍即使用机器人。信号输入是指外部感应器将信号传输到机器人,一般运用于等待指令,我们点击动作菜单等待,这里我们就可以找到输入信号 x, 该页面下能够选输入信号 以及下方对信号的设置有通断、上升延、下降延、不限时和现时通就是等待外部信号接通 断就是等待外部信号切断。上升岩是指按键一按下的那一瞬间就控制输出,是一个从无到有的信号。 此类信号一般为常开信号,下降严则是相反,是指按键松开的那一瞬间才控制输出,是一个从有到无的信号。此类信号一般为常闭信号。限时就是限定机器人等待信号的时间,如在限定时间内 未等待到相对应的信号,机器人就会报警,不现实则允许机器人一直等待相应的信号。我们来进行一下实际演示。这里我们的机器人接入了一个长通的外部传感器 x 零三幺,我们将其勾选选择断并线十五秒,插入并自动运行程序。 等待五秒后,机器人未能接收到传感器段的信号,就会发出警报。 如果机器人接收到了传感器传来的信号,就会运行相对应的程序。我们将现实设定为不现实,来看看效果。 可以看到机器人就会一直等待相对应的信号,不会发出警报,直到等到对应的信号后运行相对应的程序。接下来我们看看 上升沿的应用效果,勾选对应的传感器以及上升沿,设置限时五秒,再编写一下接收到信号后机器人进行的动作程序,我们来运行一下看看效果, 可以看到机器人在接收到一瞬的信号后,就开始运行我们设定好的程序了。以上就是我们博朗特大课堂输入信号 x 的介绍,即使用对内容有任何问题,欢迎来到评论区提问,关注我获取更多技术资讯。
 04:36查看AI文稿AI文稿
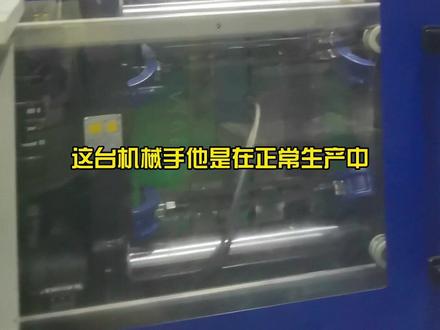
04:36查看AI文稿AI文稿哈喽,大家好,今天给大家分享一个案例。嗯,这台机械手它是在正常生产中,它突然是下降取货上来以后锁不了膜了, 那么对方的你们说他是把这个插头,他插在不使用机械手里面,他就可以正常锁膜,但是插在使用机械手里面他就锁不了膜。 这台住宿机呢是在生产中的,他突然变成这样,那是什么原因呢?我怀疑就是他这个机械手给出的可锁膜的信号,住宿机没有接收到, 那具体是不是这样,我们一起来看一下,我们找到这个机械手里面的,点一下这个监视,找到住宿出,我们找到这个 可锁膜的这条线,他这里序号是 ym 二,我们找到这条线,看一下这条线有没有问题, 那么我们现在就把这个盒子打开,把这些螺丝给他拧掉,打开看一下这条线,因为我看到他这里是没有信号的,那十有八九就是这个问题了, 盒子已经打开了啊,现在我们把电源断一下,检查一下这个线路,找到那个 m 二 ym 二的那条线, 我们来看一下这个线路板,这里从这里看下来,我看我就看到这条这个插件,这里明显就是松了, 看到没有,这条应该就是那个 ym 二的那条线,看到没有,这针都针脱掉了,看一下 这里面有字的,看得到的,我们在检查线路的时候,一定要把这个开关给它关掉,应该就是这个问题了,把它插回去插好, 这是我们开店看一下, 等这个机器启动,因为这个膜他是这几块拉杆拉开的, 辣的很响的,估计憋的时间久了,他就震动,震动就把那一阵松掉了, 昨天呢,他们也找不到原因,所以停了一晚,用手拿了, 我们先恢复原点,等他恢复原点恢复好了,我们来看一下 这里提示,找原点成功了,我们再点这个监视注数机出这里把门关上锁膜看一下, 看到没有,我们这里这个可锁膜的信号,现在把安全门关上他就有了。刚才是关上安全门,他也是,他这里也是没信号的,这次应该就是人锁了,我们看一下啊, 已经可以了,你看这个辣的很用力, 他这个拉的很响的,估计就是开的时间久了,他正正正就把这个线的插头那里正松掉了,然后他们也没拆开检查一下, 这个基本上就是这样的,今天的视频就分享到这里吧,感谢你的观看。
1424粤黔五金商行







猜你喜欢
- 2073north