modbus 轮询完成位用什么好
大家好啊,欢迎收看本期课程啊,这节呢,我们开始讲一下三菱 p l c 做 model bug 通讯的时候论询的几种方法啊,那么这几种方法呢,呃, 各有优缺点了,总之呢提供几种方法啊,然后今天第一节我们先讲最简单的一种方法啊,那就是用定时器论询啊, 那么定时器轮巡的这种情况呢,我们还是从最简单的第一种方式说起啊,十个仪表啊,十个仪表站号相同啊,不是站号呢,从一到十,然后仪表是一样的啊,也就是说我们要查询的仪表的地址是一样的啊,依次轮巡,那么这种情况 怎么轮巡啊这种情况啊,那么定时器轮巡呢?这里啊,我用了一个自定义的定时器,而不是用 m 八零幺二八零幺三 这种一秒啊,零点一秒的啊,自定义的好处什么呢?就说这个定时器的时间间隔呀,我可以随便设定啊,随便设定啊,在平程序上啊,比如说 t 零啊,它的用法呢,就是 t 零长臂点,然后接通 t 零 第二百,那么当 dt 零接通之后,那么 t 零的长臂点就断开了啊,然后又重新一个循环啊,重新一个循环其中呢第二百的值啊,你可以任意设定啊,一十啊, 五啊,二二啊三的等等啊,总之这个轮寻周期呢,由你自己来控制啊,可以在触摸屏上输入轮寻周期的啊,这是然后呢,每当 t 零接通的时候啊, 呃,要把这个账号呢账号啊给他改写成,呃 加一啊,加一站号,因为站号呢,我们是从一到十开始的,一一直到十啊,所以每次呃定时器接通的时候呢,把站号依次加一啊,然后呢,因为我们的那个相爱码啊是自动计算的,所以这种情况呢,我们就不需要 改动其他的了。我们假设把账号呢存到第一百中,那么我们的 rs 指令呢? rs 指令啊,是第一百开始的啊,第一百 k 八啊,然后呢第一百一 k 九 啊,这是我们的 rs 指令啊,这个我就不写了啊啊,然后当这个站号啊,站号大于十的时候,我们把一传送给十一一百啊,就是啊,站号这写错了,第一百,第一百大于十的时候,我们把一传送给第一百, 就说从一到十到十,然后呢再从一循环过来啊,然后接通之后呢,我们触发 is 发送指令 m 八幺二二啊,这就是构成轮巡的,就是每一定间隔啊, t 零的间隔时间呢?比如说零点五, 零点五秒啊,零点五秒他发送一次啊,然后返回啊,返回啊,这个就是用定时器做轮寻的一种方法,那这种方法的好处是什么呢?就是这个轮寻周期啊,我们可以自己来呃,设定啊,设定 呃不会受一些完成信号的干扰啊,就是到时间我就我就加一,然后再发送到时间发送,但是呢,他的不好的地方在哪呢?这轮讯周期啊,我们设定的不能太小,如果太小了,他发 发送出去之后还没有完成啊,你再发送,那势必就造成这个程序线路堵塞啊,然后呢轮巡导致失败啊,轮巡失败,虽然他一直在增加这个数字啊,增加这个第一百的数,从账号一到二到三到四在变,但是呢,因为每次我发 出去消息之后都没有返回来,导致轮轮寻失败啊,轮寻失败啊,这就是这种方法啊,其实也是最简单的方法啊,最简单的方法 啊,那么今天呢,我们就先介绍这一种方法啊,定时器轮寻啊,最简单的方法啊,后面我们会介绍其他的方法啊,欢迎大家继续关注啊。

粉丝10.0万获赞29.0万
相关视频
 01:43查看AI文稿AI文稿
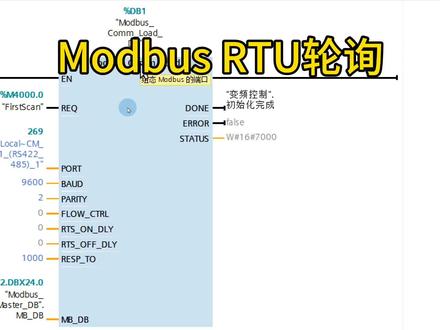
01:43查看AI文稿AI文稿我们在编写 modebus 通讯的时候呢,需要考虑轮寻,那么轮寻为什么要轮寻呢?呃是因为,呃 modebus 它 rtu 的一个通讯呢是半成功的,在读的同时呢它是不能写,在写的同时它不能读的,所以会出现一个轮寻的情况, 我们要控制一台变频器,那么我们要对这个变频器的频率呢写进去,同时呢我们要读取变频器的一个温度,对吧?那这样的话,那么他就是相当于是要有一个先后的一个顺序啊。那么怎么进行轮巡呢?通常第一种方法呢?我们会使用这种啊完整位来轮巡这边呢有一个呃程序,是吧?这个是一个初始化这个块,初始化这个块呢主要是设定他的一个呃波折率啊,基础交易啊等等。 好,那么设定完了之后呢,他会有一个柱子化完成的一个档位,一个档位有了这个档位之后,接下来我们就可以通过这个档位呢去触发我们需要进行发送或者读取的一个控制控制字,那这边呢?呃一到二这边是写控制字和他的一个频率,我们可以看到当我们柱子化完成了之后会触发这个块,那这个块呢,如果说 他发送也接收正常的一个完成了之后,这边有个档位,会有一个主战的一个完成位,那么这个完成位的话就会触发呃下一个快,那么如何触发下一个快呢?就在我们这边有个主战的一个完成完成了之后呢会自卫一个主战触发一同时呢我们复会复位哪一个呢?复位这个,呃主战触发,对 这个这条指令啊,当我们这个呃完这位置之后,那么下一个这边呢有一个出发一呢,然后接下来他就会接通触发这一条指令,那么这条指令如果是段位已经完成了之后呢?他接下来呢?还有这边触点呢?会接通,一旦接通了就就会主张完成二,这个 这个线圈点了,他会置位,一旦置位了之后呢,其实在这边其实他就会接通唯一,然后接下来依次呢进行一个呃,写下去,然后实现这种轮循。当然我们在最后面的这条指令的话,呃最后这条指令呢,我们要复位他,然后呢 也就是复位哪一个呢?复位他去去自卫。我们的第一条指令,这样采用我们这种手拉手的一个轮寻的一个方式,这是最常用的这种完整位的来进行一个轮寻,那么还有其他的方式的一个轮寻。
1029工控小飞侠(课程在橱窗) 04:02
04:02 14:33查看AI文稿AI文稿
14:33查看AI文稿AI文稿大家好,欢迎收看本期视频,这部分的视频分两期给大家介绍,视频主要介绍 motorbus rto 的论询方法以及条件写如何实现。 今天我们介绍的是第一部分,主要包括以下几个方面的内容。首先介绍 x 杠两百 smart 做 modbus rto 通信概述。 然后呢,介绍 mode bus rtu 轮巡的几种方法,包括定时器轮巡、定时器加计数器轮巡以及档位轮巡。 然后呢,介绍这三种方法的优缺点,以及如何提高轮旋效率。第二部分呢,介绍 modbas 轮 人群的条件写如何实现。首先我们来看一下 model bus r t u 这个协议。 mode bus r t u 呢,是一个公开的通信协议,是一种单主站的主从通信模式。 呃,它的结构呢,是应答式结构,主站发送请求,从站响应,如果有异常,那从站会响应一个异常的一个应答针。功能代码的最高位会质疑。 modebas rtu 的主站呢,是没有地址的,重站的地址范围是零到二百四十七,其中呢,零是广播地址。 modebas rtu 的传输戒指可以是 r s 四八 五接口,也可以是 rs 二三二接口或者是光纤等,这呢就是 models rtu 的一个通信概述。接下来我们来看一下 s 七杠两百 smart 做 models rtu 通讯的一个软硬件条件。 硬件上, h 七杠两百 smart 全系列都集成了一个四八五口,都支持 model bus rtu。 除此之外呢,每一个标准型的 cpu 都可以扩展一个信号板,集成了四八五或者是二三二接口,四八五二三二接口可选。 我们来看一下软件条件。 step 七 maker when smart 软件集成了 modbus art u 库库里呢,集成了子历程和中段历, 可以轻松实现 model bus rtu 通信。 model bus rtu 通信在工业控制现场中呢,有着广泛的应用。而七杠两百 smart cbu 通信口呢,实际上实现的是一个半双共通信, 当连接多个设备或者同一个设备有毒有血时,需要轮巡,那轮巡程序直接影响了轮巡效率。下面我们来看一下 model bus rtu 轮巡的几种方法。 我们先来看第一种方法,第一种方法呢,是用定时器去轮寻,实现两个读请求,一个斜请求。我们来看一下这个程序的一个流程图,在程 扫描的第一个周期,复位所有标志位,创建自复位定时器。轮寻存储器呢,按照这个定时期的时间自加一,当轮寻存储器等于零的时候,处发第一个毒情球。当轮寻存储器等于一的时候呢,处发第二个毒情球。 当轮寻存储器等于二的时候,触发斜请求。斜请求完成之后呢,复位轮寻存储器进入下一个轮寻。下面呢,我们来看一下程序实现 使用 s m 零点一复位所有的标志位,包括定时器 ctrl 的完成位以及 m s g 的错误位和完成位。 t 三三呢,是一个 自复位的定时器轮圈存储器 m w 六,按照 t 三三的这个时间,也就是一秒钟四加一。 然后呢,使用 s m 零点零去调用 ctrl 指令,当这个轮循存储器的这个值等于零的时候呢,调用第一个 m s g 指令。第一个 m s g 指令实现的是读从占地址为三, model box 地址 是从四万零一开始的十个保持计算器的值,当轮旋存储器等于一的时候呢,调用第二个 m s g 读取从真地址为三 modbas 地址。从四万零十一开始 的十个保持计存器的值,当轮循存储期的值等于二的时候,调用第三个 m s g 给重占地址为三 modebus 地址。从四万零二十一开始的十个保持计存器写值。最后呢复位存储器,这就是使用定时器实现轮巡的一个程序实现, 下面呢,我们来看一下第二种方法。第二种方法呢,是使用定时器加计数器的这种方式去实现的,同样也是两个毒请求,一个斜请求。 我们先来看一下程序的流程图,同样在程序扫描的第一个周期, 复位所有的标志位,创建自复位定时器,计数器按照定时器的时间字加一。当计数器等于零的时候,复制读参数发送第一个读请求报文。 当计数器等于二的时候呢,复制读参数发送第二个读请求报文。当计数器等于四的时候,复制斜请求参数发送斜请求报文。 写完成之后呢,复位计数器,进入下一个轮讯。我们来看一下程序实线使用 s m 零点一复位所有标志位,包括 ctrl 的完成位 m s g 的错误位以及完成位 t 三,三为自复位的定时器,计数器 c 零呢,每八十毫秒自加一。 当计数器等于零的时候呢,给 model bus 的参数复值,包括重占地址读写参数, model bus 地址,通讯的数据个数以及数据指针。 那这个实现呢,就是读从占地址为三 modbox 地址。从四万零一开始的十个保持计算器的数值,嗯,当计数器等于二的时候呢, 同样的也是 model bus 参数复制,读,重申,地址为三 model bus 地址从四万零十一开 开始的十个保持计算器的值,当计数器等于四的时候呢,同样也是做 modelbox 的参数复制给从单地址为三 modelbox 地址从四万零二十一开始的十个保持计算器写值, 然后呢调用 ctrl 指令,调用 m s g 指令, 当计数器的值大于等于五的时候,复位计数器, 这个呢就是使用定时器实现轮巡的一个程序实现。第三种方法呢,是使用完成位去轮巡,实现两个毒性球,一个斜性球。同样我们来看一下程序流程图,在程序扫描的 的第一个周期,复位所有标志位,使用 ctrl 指令的完成位去处发第一个读清球,第一个读清球的完成位复位第一个读清球,然后呢去处发第二个读清球, 第二个读请求的完成位复位第二个读请求,然后呢去处罚写请求,写请求的完成位复位写请求,然后呢再去处罚第一个读请求。进入下一个论讯, 我们来看一下程序实线,同样也是用 s m 零点一复位所有的标志位包括 control 的完成位, m s g 的完成位以及错误位。 control 的完成位呢去处罚第 第一个读请求,调用 ctrl 指令,这是调用第一个 m s g 指令处发第一个读请求,读取重振地址为三 modelbox 地址从四万零一开始的十个保持计算器的值,完成后复位, 调用第二个 m s g 指令,第一个读请求的完成位触发第二个读请求, 读取从占地址为三 modbus 地址从四万零十一开始的十个保持计算器的值, 完成之后呢复位,然后再用第三个 m s g。 指令第二个毒性球的完成位处 发斜请求给从战地址为三, modebas 地址从四万零二十一开始的十个保持计算器写直,完成后复位,然后呢去处发第一个读请求,继续下一个轮寻, 这就是使用完成位实现轮巡的一个程序实现。以上呢是这三种轮巡方法, 那我们了解了 modbus, rtu 轮巡的这几种方法,那么这几种方法有什么特点呢?下面我们来看一下这几种方法的 优缺点。首先定时期轮循的这种方式呢,有个特点,就是说即使存在没有回应的这种 错误的情况下,不会导致程序卡死,但是呢,这个定时期的时间呢,需要测试才能得到一个合适的时间, 实际上这个时间呢,跟呃波特率啊,我们传输的数据量呀,从占的响应时间以及功能码这些都有关系。 那定时器加计数器的轮学呢?这种方法呢,它有一个优点,因为只调用了一个 m s g。 指令,所以它可以节省程序的空间, 但是呢,同样这个定时期的这个时间呢,也是需要经过测试才能得到一个合适的定时期时间。 实际上档位的轮循它有一个优点,就是说它的轮循效率很高, 第一个任务完成之后呢,立即处发下一个任务,但是如果有从战掉战的时候呢,对其他从战他是有影响的, 这是这三种轮寻方法的一个优缺点,下面呢我们来看一下呃,如何提高轮寻效率?首先我们来看一下 m s g 的这个完成位,在什么情况下才会制位 m s g 这个指令呢?被激活之后呢,它会发送 model bus 的请求报文,真,如果在这个 time out 的这个超时时间内呢,没有受到从战的一个回复,这时候呢,主战的这个协议库 呢,默认的情况下,他还会发送两次 model bus rtu 的请求报文,真,如果在最后一次请求报文真发出之后, 在 time out 这个时间内仍然没有受到应答,这时候呢,完成位就会被质疑。 那我们了解了完成位的这个机制之后呢,就很容易找到提高效率的方法。第一种方法呢就是设置合适的一个 time out 时间, 这个时间呢是主站等待重站响应的一个时间,他的单位是毫秒,典型的设置值呢是一千,也就是一千,毫秒,允许的范围呢是一到三二七六七这个时间, 天呢和波特率数据量重振的享用时间都是有关系的。第二种方法呢,是减小重试次数, 减少重置次数的这个变量呢,实际上在 model bus rtu 的主战协议库的符号表里面去获取 叫摩托巴斯 retrise 这个变量的数值呢,默认的是二,我们可以把二改成零,这样呢就可以取消摩托巴斯请求豹纹针的一个重试次数。 第三种方法呢,就是说对于没有必要实时读取或者写入的数据, 我们呢采取一个条件写或者条件读的这种措施去提高这个论询效率。 那我们如何实现条件写呢?请大家观看下期的视频,今天的视频呢,就分享到这,感谢大家的收看,谢谢大家,再见。
340Revive yeah 08:36查看AI文稿AI文稿
08:36查看AI文稿AI文稿大家好啊,欢迎收看本期课程啊,这节呢我们继续讲 a d p r w 指令啊,那么上一节呢,我们讲了这个零三啊,零三这个功能 功能码的使用方法啊,那么这节呢,我们看一下这个零三的功能码啊,怎么轮巡啊,那么所谓轮巡呢,什么意思呢?就是我们针对,比如说我们用舞台啊,舞台相同类型的变频器,我们都需要读取他这个二幺零二这个地址,那么我们就需要轮流的发送这 个代码给变频器啊,那么这里呢唯一改变的是什么呢?就是账号其他的都不变啊,限量码是自自动计算的啊,所以呢限量码也是变化的,那么从零一,零二,零三,零四,零五啊,一直这么进行反复的读取啊,读取,因为我这里啊只接了一个变频器,所以 只有零一,大家注意,只有零一这个返回了数据啊,零二,零三,零四呢,都是这个,呃, 重视了三次啊,重视三次或者四次啊,重视四次,然后呢没有返回正确数据啊,所以呢,我们就看一下啊,看一下怎么进行轮巡啊,而且和轮巡相关的参数有哪些?我们看这个程序啊,我们看这个程序达到监控, 那么前面参数部分就不讲了,参数部分啊,那么这里呢,我还是用这个上接着上节讲的啊,用寄存期地址啊,大家注意我用的是还是寄存期地址来代替我 我们的自然数啊,比如说 a d p r w 第十,第十一,第十二,第十三啊,然后第一百 z 零,那么这是啥意思呢?就说我这个第十这个地址啊, 每次他会自动递增的啊,自动递增的啊,就说当 m 八零二九啊, m 八零二九指的是指定执行完毕,而 m 八千这个触点是常开的啊,他常常常接通的啊,在这种情况下呢,就说当我们每个触点啊,每个触点 那个进行呃,三次重试或者四次重试之后,那么他就自动进行轮巡的,那这里要注意的什么呢?第一个呢就是我递增的啊,递增的呃方式就是 m 八零二九 指的是指令执行完毕啊,指定执行完成,然后呢把第十加一。第二个呢就是当第十大于某一个数的时候,然后呢我们把 k 一传的给第十,那这样做就是我们最 最多呢遵循多少个变频器。比如说这里呢大于等于五啊,实际是四个啊,因为他等于五也是 零一零二零三零四,假如说这里我给他改成大于五啊,那么他就变成五个了啊,大于他就会发零五了啊,大于五就变成五个啊,那么我们看一下是不是这样, 现在看,大家现在看啊,现在有零五了,他们,呃发了四次啊,发出四次,零一呢,因为他有数据返回了,所以只发一次就结束了,然后就开始零二啊,零二呢?三次 啊,零三呢?四四零四四四啊,零四四四,就是他会自己重试的啊。那么影响这个轮旬的参数有哪些呢?是不是很简单的轮旬程序啊?就这么简单啊,那影响轮旬的参数啊,这里面呢有一个, 呃,有一个什么呢?你们看啊,这里啊,八四三零啊,八四三零,这个八四啊, 这个这个啊,超时设置啊,八四二九,那么这个八四二九啊,我们设置的时间越短,那么他轮巡的速度越快啊,这 这里呢,设置一秒啊,一秒超时,那么他是一秒发送一次啊,大家注意看这个四十四、四十五、四十六、四十七、四十八、四十九啊,基本都是一秒多了,十毫秒啊,因为他的扫描周期是十毫秒啊,我们的片期扫描周期是十毫秒,所以呢, 在超时之后十毫秒,他在发送第二个,那么如果说我给这个设置成一百毫秒啊,一百毫秒,大家看一下,他就会很快了轮巡的速度啊,所以呢,影响我们轮巡的就是这个超时时间的设定啊,大家看, 现在呢,就是一百毫秒啊,一百毫秒啊,但是呢,没有生效,没有生效,因为我们没有重启啊,那么我直接把八四二九改成一百啊,直接复制 啊,八四二九射程一百之后,大家看啊,现在这轮巡速度就很快了,一百毫秒轮巡一次啊,一百毫秒发一次指定,一百毫秒发一次指定, 所以我们如果想提高你的效率,那么你就把这个超时时间设的越短越好,当然不是说绝对的啊,说你设置成十毫秒,那十毫秒可能有的时候他没 有返回数据呢啊,所以不是越短越好就合适就行啊,那么这里呢,我设置一百毫秒,他,他一秒钟就将轮巡十次啊,假如说你有五个变频器,那么一秒钟呢,每个变频器读取两次啊,这样就能达到我们的呃快速轮巡的效果啊,那么轮 询指令呢,就是这样啊,就是我们呃, m 八千一直接通啊,不需要断开啊,大家注意,轮巡如果是同样的功能码或者同样的类型的地址,不需要断开啊,大家注意,不需要断开, 只要让这个 m 八千一直接通,然后 a d p r w 指令开始就可以了,这里面我也可以改地址啊,就说当我们 m 八零二九结束之后,我可以任意给第十、第十一、第十二、第十三复制,然后读取啊,这是 一个啊,就是我们的轮巡发送指令。第二个呢就是接收啊,接收数据,因为现在呢,我有五个变频器, 五个变频器我肯接收返回的数据,我肯定不能都存到第一百中,所以这里我加个变指,那么变指呢,就是第十乘以一啊,存到第零种啊,第十乘以一, 存到第零种,然后第零再乘以十啊,存到这零种啊,存到这两种,但是这是乘以一没, 呃,减去一啊,减去一啊,不是啊, sub 减一。那么什么意思呢?就是当我第十这个账号啊,等于零一的时候啊,第十这个账号等于 零一的时候啊,那么我这个这零呢?将等于零,这零等于零,这零的零,第十等于一,他减一等于第零,第零再乘以十等于零,那么第十等于 等于零二的时候,这零等于等于多少呢?等于十,那同样的第十等于零三的时候啊,零三的时候,这零等于二十啊,这样我们通过变值啊, 就把这个这零计算出来了啊,那么我们不同的这个地址呢,零一,零二,零三,零四,零五啊,零六,甚至那么这零呢,相应的就等于一,零十二十三十四十四十,然后 我存储这个地址啊,第一百 z 零。那么第一次当第十等于一的时候啊,第十等于一的时候,存储的就是第一百开始的十十个地址啊,第一百开始的十个地址啊,因为现在我读的是五个地址,五个地址啊,五个地址 啊,第十三是一啊,第十三是一啊,就是我要只读一个地址,那么为啥我用每次递增十呢?这样方便。假如说我要读五个地址,那么他就是第一百到第一百零四啊,再用呃变频器一 的地址,然后第二个呢,就是第一百一啊,第一百一,第二个变频器的数据存到第一百一种啊,第三个变频器的数据存到第一百二种。 第四个呢?存到第一百三种啊,第五个呢?存到第一百四种啊,一百四种。就说我们不同的变频器,那么 他返回的数据存储的地址是不一样的,假如说我都存到第一百中呢,就被后面的覆盖了,覆盖了,所以呢,这里呢,我返回的数据这里也加个便址,这样就方便我们 监控不同变频器的数据了啊,数据了。所以这里关键是两步,第一步就是轮巡的指定啊,我们怎么通过每次加一啊,返还不同的账号。第二步呢就是返回的数据怎么存到不同的地址中啊?通过变址来实现啊,大家自己可以尝试一下。 那么如果你有多台变频器,那最好了,因为我只有一台,所以呢,他只能第一台返回数据啊,如果我有五台,那么可能每台都会返回数据啊,这样他的呃内容就不同了啊,不同的。那今天课就讲这么多啊。
764自动化韩工 07:57查看AI文稿AI文稿
07:57查看AI文稿AI文稿大家好啊,今天我们讲一下凉白丝骂他的轮巡啊,那么轮巡呢,分成两种啊,两种,那么具体哪两种呢?一种呢是这个只读轮巡啊,只读轮巡呢,就是我们可以读一个仪表的不同地址啊,或者不同仪表的不同地址啊,这都叫轮巡。 为什么一个仪表的不同地址要读呢?因为有的仪表他的距离不是连续的啊,这个地址啊,比如说一二三四五,这是连续的,那突然来个一百 啊,或者来个二百这个地址,那不联系我们不可能把一到一百全读出来,是吧?所以我们只能先读一部分,再读一个,再读一个啊,这就是 为啥要轮寻啊,很多仪表的地址并不理连续啊,所以一个仪表也需要轮寻啊,那么不同仪表就好理解了,我们读不同的变频器的频率,那么不同仪表呢,肯定账号需要 变啊,零一零二零三零四零五啊,那独的地址可能是相同的啊,所以需要改变账号,这是两种,这是一种啊,只独轮循。 那么另一种呢,是读和写配合论询啊,就说读,平时我是读的啊,平时没事我一直在读啊,在一直接电报,但是我突然想发电报了,那我就要把接电报的活停下来啊, 因为收电报,发电报都是我一个人在做,我不可能一边收一边发是吧?我只能说先停下来收电报的工作,然后帮人把电报发出去,然后呢,再接着收啊,再接着收啊,这就是轮巡啊, 那么轮巡呢,我们正常来说呢,首先呢,第一个条件是启动轮巡,启动完之后第一个站轮巡啊,第一次轮巡啊,然后轮巡完成之后启动下次轮巡,一般来说我们可以 用定时器来启动下次轮巡或者用完成新号啊,这两个都可以啊,都可以,但是有个弊端什么呢?就说这个完成新号如果长时间没触发呀,或者触发了他不这个呃不,那个 呃出错了,那可能没有完成信号啊,没有完成信号,那么这时候呢我们就要用定时器来辅助他进行下次轮巡,不然就卡在这里了,卡在这里了啊,所以呢我们这个轮巡呢,大家注意啊, 可能有多种情况啊,其实有的同学会问,那我用完成信号轮巡突然卡住怎么办啊?有一站出错了,出错就要卡住啊,那卡住怎么办呢?当然得想办法了是不是? 那今天我们就先讲只读轮巡啊,只读轮巡没有卡住的情况啊,怎么来进行轮巡啊?怎么进行轮巡啊? 那么我们看这个程序啊,看程序,首先程序呢初始化啊,这不用说了啊,初始化就初始化呢,我们九六零零二零一千零呢,代表的是我们这个啊,零啊代表的是我们这个, 呃本体的这个串口啊,就说我们两百 smart 的本体是有串口的啊,就是零,如果是你加了插件板就是一啊,或者加通讯模块的,不知道有没有啊,那就是二。可能啊,所以呢本体是零啊,如果加插件板是一啊,这两个, 第二个呢就是我们启动轮巡,启动轮巡呢,这里面我用一个微 b 啊,微 b 二十来作为他的轮巡步啊。轮巡步我没用 m 啊,用 m 点,因为太乱了啊,也会呃看不清,所以我的习惯呢,就是用一个寄存器来进行存储这个轮巡步 啊,第一次轮胎的一,第二次轮胎的二,第三次轮胎的三啊,第四次轮胎的四,当第四次轮胎完成之后,那么我不再 我第五次轮巡了,那我就在他那得一啊,所以我们的思路很清晰啊,就说轮巡,就让这个 ab 二十,得一,一个数就行啊,得一个数啊, 一就是第一次啊,二就是第二次啊,然后我们处使画, s s m 零点一处使画,把一传给 vb 二十,然后 vb 二十传过去之后啊,传过去之后,大家看 vb 二十的上升眼啊,上升眼触发轮巡,触发轮巡,这个 从从站的站号是一啊,零呢,是独,然后这个地址四八四五零是开达变频器的这个, 呃,二幺零幺,这个地址啊,二幺零幺 h 二幺零幺,这个地址太大的啊,八四五零,然后一是只读一个,因为我们要演示轮巡啊,我只有一个变频器,所以我就不同的地址进行轮巡啊。 二幺零幺,第一个地址,第二个地址呢?二幺零二,第三个地址二幺零三,我就读这仨地址啊,三字轮群讲解这个案例啊, 之后啊,然后存的地址呢?存到 v b 一百中啊, v b 一百啊,这是第一次轮巡完成信号呢, m 二点零啊,出错信号 m b 一啊, m b 一,这是第一次, 然后完成信号啊,之后就完成了啊,当他的一的时候, m 二点零接通的时候啊,把二传给 vb 二零,同时呢把 m 二点零,复位啊,一定要复位啊,因为我们轮巡的完成信号 他自己是不复位的啊,你要给他复位的啊,要复位啊,复位,复位完成之后,这时候未必二十等于二啊,等于二的时候呢,那么这个他又执行第二次人群四八四五幺这个地址啊,四八四五幺地址啊,然后完成信号二点一。 m 二点一 啊,这前边呢就是微 b 二零等于二的时候啊,等于二,等于二的上升沿出发 发送啊,发送,然后完成信号还是啊,当完成之后啊,然后把三传给 vb 二零,然后呢复位 m 二点一啊,二点一, 第三次轮巡地址呢? b 四八四五二啊,四八四五二啊,然后也是读取一个地址啊,微 b 二十等于三,那么等三他的完成记号,因为我只有三次轮巡啊,所以到第三 部的时候我就传送一给这个 vb 二零啊,传送一,然后复位 m 二点二,这样我就循环起来了啊,从一二三,然后再到一二三,再到一二三啊,这样我就循环起来了啊,然后我们看下面监控地址啊,因为我设备没有动啊,没有动, 那么微币一百的地址呢?一百一百呢,是现代的这个,呃,频率啊,现代的 啊,一百是状态啊,我们看,我们先看一下这个,看一下这个地址啊,二幺零幺这个地址啊,是变频器的当前状态,乱死到把照个正转反转啊,状态二幺零二是频率,当起就是频率指定,我们让让他运行的目标频率, 然后二幺零三呢,是输出频率啊,二幺零三,因为我没有赚,所以他的输出频率也是零,然后频率指定呢,现在是三十点二五啊,三十点二五,然后呢,我们把这个 啊,第一个地址转换成二进制啊,转换成二进制啊,我们看转换成二进制之后啊,他的地址呢,就是显示这个二进制啊,就显示他的 ranxdom 状态的啊,状态的啊,然后我们可以在触摸屏上做一个状态,显示他啊,显示他 显示当前是什么状态啊?比如说我用这个 please 做一个啊,前面呢就是乱死到和照个正转反转啊,然后频率,指定频率、运转频率,还有写入频率啊,这里有个正转反转停止啊,写入频率啊,这样呢,我们就能控制这台 变频器的正反转停止,还有写入频率,还有监控他的频率啊。那么这个呢,就是我们只读的轮巡啊,很简单啊,思路很清晰,就是你增加了多少个站,我都要按照这个思路去写,就一点问题没有啊?一点问题没有啊。所以呢,我们这个, 呃,就是用一个寄存器的一,就是第一站的二,就第二站的三的第三站啊,这样来轮巡啊。
1263自动化韩工 00:27查看AI文稿AI文稿
00:27查看AI文稿AI文稿摩托巴斯如何完成轮巡呢?使用这一行指令就可以搞定,每一秒钟递增一个。然后呢,当他大约等于三的时候,把零给到他,那这样的 v w 零的值呢?一直是零一二,零一二,等于零的时候,调一次 m s g 指定用于启动,等于一的时候呢,调一次 m s g 指定用于写边缘的频率, 等于二的时候呢,再调一次 m s g 指令用于一读取编辑频率。这是呢一本全才的讲义。
789工控小羽 今晚8点直播













