发那科机器人pns0001什么意思

粉丝1.9万获赞12.4万
相关视频
 02:31查看AI文稿AI文稿
02:31查看AI文稿AI文稿大家好,我是华为致信范明成。上一期我们介绍了关于放大客机器人自动运行所需的前提条件,那今天我们介绍一下放大客机器人自动运行的程序启动类型。 放大客机器人常用的程序启动类型有机器人启动请求 r s r 和程序号码选择。启动 p n s。 其中 isr 启动是从遥控装置通过外围设备 io 来选择并启动的一种功能,该功能使用八个机器人启动请求信号输入信号。也就是说使用 isr 来外围启动程序,最多只能建立八个主程序。 p n s 启动是从遥控装置通过外围设备 i o 来选择或核实程序的一种功能。 p n s 程序号码通过八个输入信号来指定,使用 p n s 来外围启动程序最多可以创建二百五十五个主程序。通过八位信号二进制转换成实进制来选择程序。 下面我们来讲一下 rsr 和 pns 外部启动主程序的命名规则。按菜单设置选择程序,进入界面后,在第一行选择 rsr 或者 pns 启动。需要注意的是,每次切换模式必须断电重启后才会生效。 按 f 三进入详细界面。如果我们使用的是 r s r 程序外部启动,那主程序的命名规则就是 r s r 加程序标号加基数。举例, r s r 一程序 编号为一,基数为零,那主程序的命名就是 r s r 零零零一。 r s r 一程序编号为六,基数为一百,那主程序的命名就是 r s r 零一零六。 如果我们使用的是 pns 程序外部启动,那主程序的命名规则就是 pns 加程序号加基数。举例,当我们收到 ui 九和 ui 十的输入信号, 转换成实,定制为三及程序编号就为三,基数为一百,那我们主程序的秘密就是 pns 零一零三。 本期介绍就到这里,那么下一期我们会介绍帕纳克机器人的系统信号。感谢大家持续关注。我是范碧晨,我们下期再见。
91华意智信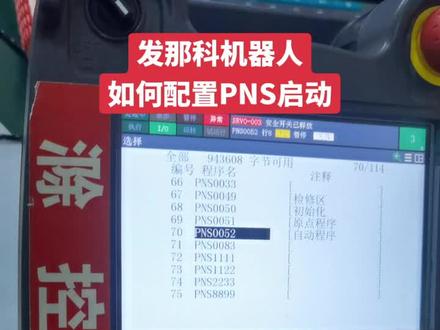 00:26查看AI文稿AI文稿
00:26查看AI文稿AI文稿我们来看一下这个 plc 调用机器人任务号如何配置 pns 启动好,点击麦六,然后在这边设置, 这边选择程序,把 s r 改成 p n s, 选择 p n s, ok, 点击详细,然后我们的基数一般默认不变, ok, 待会,待啊,断电要重启啊。
 00:40查看AI文稿AI文稿
00:40查看AI文稿AI文稿我们来看一下,如果我们想调用这个 r s r 零零幺程序,我们怎么调用啊?首先点击 menu, 在 menu 这边呢,我们点击设置,在设置这边选择程序,点击 ant, 然后这边选择方式呢,我们选择 r s r ok, 然后这边点击详细,大家注意啊,这边一个安沙一跟刚刚我们程序名是一样的,我们点击启用, ok, 因为我们这边的基数啊,设置的是零,所以说我们安沙一 对应的是暗杀零零零幺这个程序,只要暗杀一给型号就会调用我们刚刚看到的暗杀零零零幺程序。
 10:00查看AI文稿AI文稿
10:00查看AI文稿AI文稿下面我们讲一下这个启动远程控制这个法,耐克的启动远程控制哈 是通过外围的设备与 io 通信的方式启动控制程序,可进行远程控制的程序分为 rsi 程序、 pns 程序以及红程序。 我们首先看一下哈,就是我们通过呃启动远程程序,我们点击先点击 menu, 然后到我们的这个 呃菜单中选择程序,选择程序, 点击这个 点击选择程序,然后程序模式选项, 我们看一下, 在这里设置里面有一个选择程序,然后我们选择呃 是这几种方式的哪一种,是不是选择?比如说我们是 rs, rsi 这种方式,那我们就选择这种方式,然后呢 可以点击详细,点击详细可以对他进行设置,那么创建 ic, 创建 rsi, 在谁来给他程序当中 写那个的程序,然后创建你的程序,点击创建然后命名是不是命名?比如说我们 ic 零八八,然后输入, 然后点击安特就可以创建了,就可以创建出来这个程序。 那么启用这个程序呢?要在你的这个 要把这个视角器要调整到 off 状态,并且呃控制柜里达到 aut auto auto 模式,然后点击这个是单步,必须要用单步,是不是用单步的方式, 单步方式,这样的话我们就可以对他进行设置了。再一个将外专用外部信号启用, 专用外部信号在哪里呢?在系统配置里面,我们看在配置系统配置配置里面有一个 呃专用外部信号的要启用它,是不是这个要启用?再一个是远程本地设置,设置成远程,我们看一下,呃, 再往下翻,我们是不是第一,大概四十三号,第四十三号 这里到了,这个是呃,我们如果是外部自动用远程的方式,我们要切换,他也就在这里选择远程本地,比如说我们用远程, 然后呢把这个变量哈,把这个变量, 呃,其中有一个变量叫刀乐事 将系统变亮。 rmt, 我们找一下 rmt master, rmt i m t master, 这个 rmt master 设置为零, 设置为零,这样的话,如果也就是说这个零的话,代表的是外围设备,一呢代表是显示器键盘,然后二呢是主控计算机, 然后还有一个是三是无外围设备,然后确定为,如我们设置为零就是外围设备,再一个确定 u 二一一二三一二八必须打到 状态,你们看一下 u 二在哪个位置呢?就是在我的系统变量里面,系统变量里面 io 里面,在我 io 里面,然后我们点一下 io, io 呢,就是显示我们的 uio, 这个第七第一,然后选择一二三八,一 一一二三八,一二三八呢, 要达到昂状态,要达到昂状态, 一二三买达到 状态,此时 ui 九呢,他会启动的是这个 ui 九启动的是 rs 一启动, rs 一 rsr 启动的是第一种方式, 这是我们的 rsi, 那么 p n s 的程序呢? p n s 启动是一种通过遥控装置启动程序的方式, p s 是通过八个输入信号来指定这个控制装置,通过 呃 ps 一到八,然后二进制堵出信号被忽略,在 处于暂停状态或者是直行状态,信号被忽略,在 on 的状态下。 pst r o b e 在 on 的状态是不能通过显示器来选择程序啊,这是这个 这个的设置哈。呃,主要是看什么呢?到麦六键里面选择,程序里面要把它选择, 也就是说我到我的配置里面 配置设置里面的这个选择,程序里面把这个选择改成第二项。 ps, 然后呢?再把这个详细里面的。
50柔智机器人 00:47查看AI文稿AI文稿
00:47查看AI文稿AI文稿二个同样按菜单在下一页里面系统配置,这里面我们点 enter 进去,分别有两个地方,第一个就是七个专用外部信号,给它打开使用一个远程本地设置,我们要改成远程本地的话就是我们在控制柜上启动远程的话,我们就是那种外部启动先远程, 整个程序里面我们既然是一,然后基数是零的话,那我们程序命名就要是 rsr 零零零一。还有一步就是我们要把信号关联过去, io 里面这个 ui 九第一个信号,我们需要给它关联到我们的 开关上去,上面我们可以看到操作模式,奥特仪选择就是他现在已经是自动模式了,我们按下复位,他现在已经没有报警了,我们现在给一下 ui 九这个信号啊,现在程序已经执行中,机器人已经开始动作啊,这就是一个完整的外部启动过程。
908机器人-唐老师 04:40查看AI文稿AI文稿
04:40查看AI文稿AI文稿如何进行那个机型镜像备份?在文件里面找到文件,然后再找到 f 五工具, 然后切换设备。如果说你的 u 盘插在这个 tp 这个上面,然后插个 u 盘,然后选择这个,然后点击确定, 然后再点击呃备份 s, 然后进行备份,然后点击确定,确定完成之后,然后就把这个机器人关电 重启,然后他就自动惊讶备份了,备份完成之后他自动就保存了。记得你的备份的文件夹一定要是空的,这是母的文件夹,就是一个全全新的完全空的那种优盘,明白吗?就是里面什么文件都不能不能有是吧?对对对, 一台格子化一个优盘单车是吧?对对对,明白吗?这个是进项备份啊,现在进项恢复,进项背恢复的话,这个就是啊,你可以看那个基本操作里面 f 一跟 iphone 同时按一下,就是啊,先断电, 断电之后,然后 f e, f 二同时按一下,然后再把电送上去,送上去之后呢?然后就等等到他出来几个选项。一般情况下这台机器人是呃,选择的话是 选择 pp 上的 usb 啊,就是应该是第四个选项,我记得大概啊,然后再按呃确定一号,再按,再按一字母一,然后确定樱桃,然后再按一,然后叶子点樱桃就完成了,然后 大概就自己自动的进行进行恢复备份,然后点击哦,最后他让你按精腿返回 一个被套出来的时候,大家可以按一下被套的,按回来就 ok 了,就完成了。这是新疆被我们恢复 这两个同时按才能开机是吧?开机的时候也是一直按着对吧?直到他出来见面见面了停下来了才松开。 对这个啊关机之关机之后按按住这两个开机是吧。对开机哦对 ok 那就完了就空哎。空的内存有没有要求优盘的内存有没有要求内存的话正常来讲都做的你主要是 五兆以上都是很少的很少的就我比我大的那种。你不行三十六斤啊三十二斤的十个绝对大的尽量超过八斤。现在还没超过八斤是吧。对 呃无所谓我十六点正常用很危险。是但是越大会越慢啊其实我比我经常回复之后他那个那个圆点什么东西会不会丢掉。不会的重点是一定要记得你的经验备份恢复 一定要跟之前进向备份的时候的那个位置一样位置不一样也也可以但是要交下报警就可以这个消防警察对他们来说比较麻烦吧。他们不懂就麻烦吗。那可以啊那那那就是要一样。 这这怎么消掉这个报警怎么消怎么消这个报警在这里消就可以了啊怎么消系统下一样啊。嗯就是灵位标定那里了啊按下这个 f 三啊啊然后再去 漂亮那里漂亮这个第一个 改为库啊啊然后再去明显标定那里啊更新一下就好了就相当于重新给他更更新一下不用标定低我问问低不是干啥呢需要报警 按 f 三原位标定那里稍报警 做报警然后改一下改一下那个变量就第一个嘛。啊改成错误吗现在正确是吧。对现在肯定正确了。对就改成错误 不是改为正确改为正确啊本来他是错误的是吧。啊好,我知道醋,我的醋。然后你这边还有啥问题?今天那个呢?啊?今天那个问题了,今天那个问题了。
916雪人兄弟----怀念经典 00:48查看AI文稿AI文稿
00:48查看AI文稿AI文稿大家好,我是谢伟,一分钟讲透一个知识点,今天教大家如何通过法拉格式叫气查看机器人的输入输出信号。首先按菜单键,按 f 五,按 f 二,再按 f 二,输入四个五,按 enter 键, 按菜单键,选择五 i o, 下级菜单选择六。机器人按 inter 键,这个时候是机器人的输出信号,按 f 三,可以看到的是机器人的输入信号, 我们再按一下 f 三,这个时候是机器人的输出信号,机器人的输出信号可以通过上下键。嗯,选择通过 f 四和 f 五来打开和关闭输出信号。讲解完毕,谢谢。
94左手插兜 00:59查看AI文稿AI文稿
00:59查看AI文稿AI文稿好朋友们大家好,这次这个视频呢,为大家讲解一下发纳科工业之前如何写字加一这样的技术与指令句。 那么编辑这个呢,需要借助一个指令 led 调出来啊,找到数值计算器, 然后呢计算机指令里面呢,我们可以找到第二项,按回车键会出现这样,然后我们可以用一个数据计算器,比方说二十等于什么呢?二十 加什么呢?加长数加一,这样子的话运算起来就是一 给二十,加完之后再付给二十。好的,好朋友们学会了吗?喜欢的点关注哦。
 00:45查看AI文稿AI文稿
00:45查看AI文稿AI文稿法兰克机器人新机开启以后,外部专用输入输出的屏蔽, 然后下一页 系统配置, 然后专用外部信号选择禁用, 现在上只能按复位可以了。
 01:34查看AI文稿AI文稿
01:34查看AI文稿AI文稿什么是自变量寄存器呢?自变量寄存器一般用来在两个程序之间进行数据交换,马拉克的自变量寄存器呢是用这个 a 二表示的, 他呢一般是用来接收传递的数据参数,所以呢是不能直接被复制的,如果我们想直接使用 ar 的值,而不是通过这个自变量进行参数传递的话,系统呢就会报错。举个例子,我们呢首先创建两个程序,分别是 r s 二零一和 r s 二零二, 然后呢我们进入这个零二里面添加两条指令, 然后呢我们在这个 r s 二零一里面去调用这个零二程序, 添加指令,选择六调用调用程序, 然后按一下 f 四选择选择这个长数, 然后呢我们去执行一下这个程序, 就可以看到这边对应的数值计存器, r 一和 r 二的值呢分别是一百和两百,这个呢就是自变量计存器其中之一的使用方法,明白了吗?
747机器人小王老师吖 00:30查看AI文稿AI文稿
00:30查看AI文稿AI文稿法拉克机器人必须掌握的三大视角模式,可以按视角器的 cord 键来切换。第一个关节坐标视角,我们把它切换到关节,像这样通过视角器的按键转动机器人的各个轴。第二个是直角坐标视角,它包含世界坐标系还有 用户坐标系。还有一个呢,就是工具坐标,是教,他是沿着当前的工具坐标系来试教机器人的,虽然他也是迪卡尔坐标系,但是他是工具方向上的,明白了吗?
991机器人小王老师吖 00:26查看AI文稿AI文稿
00:26查看AI文稿AI文稿什么是外围设备 io? 外围设备 io 是在系统中已经确定用途的专用信号,这些信号呢,从处理的 io 印刷电路板或者是 io 单元呢,和外围设备进行连接,从外部对机器人进行控制。 专用信号 u o 和 u i 的各项功能说明呢?我已经汇总到了这张表格里面,需要的呢,赶紧点赞收藏,明白了吗?
694机器人小王老师吖






