ev3颜色传感器数值标准

粉丝304获赞3008
相关视频
 03:01查看AI文稿AI文稿
03:01查看AI文稿AI文稿三分钟了解颜色传感器,这个是颜色传感器,它的功能有三种,检测颜色、检测反射光、检测环境光。不同的模式下,传感器发出的光也会不同, 接下来一一讲解。颜色传感器建议插在三号端口,同样的,因为三号是颜色传感器的默认端口。 第一步还是看看左上角图标亮不亮,这是检测设备是否正常工作。颜色传感器有三个模式,默认执行的是反射光模式, 这里老师先拿出三个不同模式的代码块,用余等会切换模式。切换模式很简单,只需要将对应模式代码拼,再启动代码下 进行一次就可以了。默认是反射光模式,我们就先从反射光模式开始讲。反射光,顾名思义就是检测反射回来的光,反射光状态下,传感器发出红光,红光发出,照射到物体后会反射回来, 传感器会根据反射回来多少显示一个数值。反射光最好的检测距离是零点五厘米左右,太近或太远都可能会检测错误, 越靠近得到的反射光就越强,不同的颜色反射的强度也会不同,机器人巡线比赛中就会用到这个功能。接下来讲解一下颜色模式运行检测颜色的代码 切换模式,我们发现这时的传感器发出的光变了,这里也变了,说明切换成功了。 我们来检测一下试试,放在最佳检测距离零点五厘米处,不然会出现物色。照射不同的物体就会显示对应的颜色,每个数字代表一种颜色。这个功能可以制作一些颜色分类器、 刷卡、门禁等作品。介绍完颜色功能,接下来是环境光模式,同样的操作,来一遍切换模式, 可以看到光变成了蓝色,代表进入到环境光模式了。环境光,顾名思义就是检测环境量还是暗的, 我们遮住传感器看看,发现挡住光线后数值就降低了,当环境亮时,检测的数值就大,相反数值就小。这个功能可以制作智能追光、太阳能板、智能晾衣架等等。 颜色传感器的三个功能就介绍完了,怎么使用会在实战进行讲解,下课。
519米优机器人创意中心 00:19查看AI文稿AI文稿
00:19查看AI文稿AI文稿哈喽,大家好,本节课学习的主题是单光感巡线小车。首先我们把颜色传感器安装在距地面零点五至一厘米处,通过反射光强度测量出白色反射光强度为一百,那么黑色反射光强度大概在十到二十之间。那今天我们用切换来编程,当探测到白的时候闭轮转,探测到黑的时候 c 连转。
 02:32查看AI文稿AI文稿
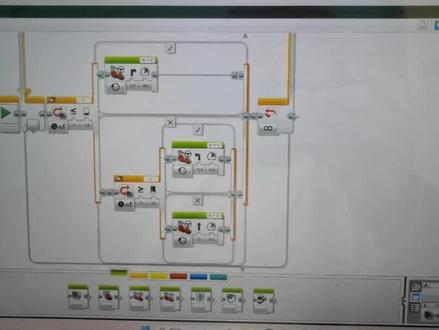
02:32查看AI文稿AI文稿哈喽,同学们,大家下午好,我是周老师。那今天我们复习的这个作品叫做悬线小车,首先还是看一下他的运行效果,因为我们这里做的是一个单光感来巡线,所以他在巡线的过程当中会左右的摆动, 在有些特定比较比较直的地方还会沿着直线走,是因为我们给他设置了一个光直的一个区间,那这个我们的一个作品,他整体的一个难点也是在光直的一个选择,光直的一个判断就是我如何设置才表示他在黑色区域,如何设设置才表示他在白色区域。因为巡线吗?这里 都不能保证我们的这个车子他是一定沿着这个黑线走的,那既然不能保证一一定沿着这个黑线走的话,我们在遇到白色的时候肯定是需要他转向的,那在遇到黑色的时候呢,肯定是需要他往另一个方向转,那如果他的数值在我们的这个黑白之间呢?我们想让他前进,那这里的数值怎么去判断呢?首先我们把我们的这个 小车的颜色传感器,然后给他连接到主机上,并且对准黑色区域,再去看我们的端口查看看他的数值。就比如说这里他的反射光强度为五啊,开关的强度为五, 那现在我把它放到白色区域看一下,他的反射光强度为三十九,这一个地方能代表着他的那个黑的黑色的反射光的数值和白色反射光的数值。所以这个时候我们要在不同的黑色区域去多测试几次,去取他的最大值,去取他的最大值, 包括白色也是一样的,再多个去去检测一下,去取他的什么,去取他的一个最小值。为什么这么说呢?因为最小值就假设小的最小,最小的这个色区域的反正完全为三十的,或者说为三十七的。 那这个时候呢?我们要去设置的时候呢,就得设置他大于这个数,或者说设置他小一点的这个数,就假设他我们刚才测测出来的他最小值是三十七,那么我这里就写三十五。当他大于三十五的时候,哎,他是处于白色区域,我们要干嘛? 我们要左转,那当他小于等于十呢?那十道是刚才我们在测量黑色反黑色区反射光强度的时候,他的一个最大值,我小于这个最大值说明他在黑色区域,所以这个时候我们要让他往右转,那如果他并不是小于等于十, 不是大于等于三十五,那就说明他是在十到三十五之间,那这一个区间呢?说他在黑色和白色的一个区间,那我们让他直行,这样呢就能实现我们的这个小车沿着我们的这黑线去进行巡线。那切换模块的作用呢?这里主要是用来判断的, 不管是你最开始是判断的黑色,还是最开始判断白色都可以。那假设这里我判断的是大于等于十,完了以后呢,我还得接着判断。判断什么?判断他是不是大于等于三十五?因为什么?因为大于等于三十五的时候,他的那个才处于白色区域,那大于等于十判断不成立呢?相当于是在黑色区,那我们不成立的时候就可以让他干嘛?让他 右转?那边判断成立的叫他左转。所以这里的判断条件是可以随意去设置的啊,但不是随意的去设置,是可以自己去选择性的先去判断牌子,或者先去判断牌子,包括这里的那个比较类型也可以自己去选择,你可以选择大于等于,也可以选选择小于等于,都是可以的。那这个就是我们今天要复习的啊,那包括切换, 我们看一下啊,换这里每一个切换他同时只能判断一个条件啊,如果我们这里要判断两个条件,我们就要把两个切换去给他进行结合。
211Week的学习日记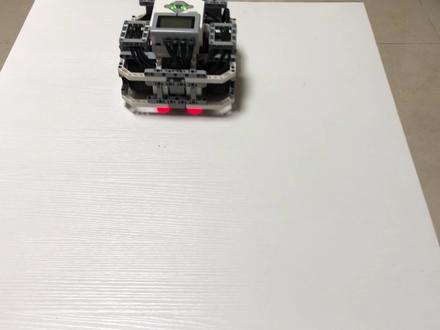 02:47
02:47 00:20查看AI文稿AI文稿
00:20查看AI文稿AI文稿a club isn't the best place a me and my friends out at the table doing shots drinking fast and then we down take my hand stuff find the man on the。
 00:27查看AI文稿AI文稿
00:27查看AI文稿AI文稿when no no when red no no no no。 好了。
73高升 32:29
32:29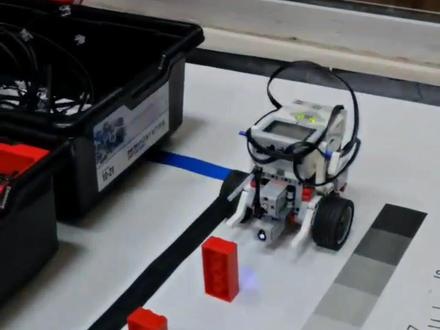 00:19
00:19 02:41查看AI文稿AI文稿
02:41查看AI文稿AI文稿大家好,我叫唐雨桐,今天我们做的是地铁检票机,我们首先做的是它的感应系统,也就是超声波传感器, 然后我们第二个做的是卡槽,也就是做的是感应系统识别识别系统,呃,用的是颜色颜色传感器,我们我们做 做了一个指纹传动,这是二级减数一,一级减四方面是什么指纹,什么指纹传动?有齿纹,带大齿纹,嗯, 这里这两个是破轮,让他让他们三个转的方向一致。嗯,端口连天 一端口连的是颜色传感器,四端口连的是大型器,四端口连接的是四端口连接的是超声波传感器, 立短口连接的是大型电机。好,程序,照着后面说。 好,三波传感器的检测范围四到五厘米之间,端口是四,这是大型,面积有五十多, 从已开启,这是颜色转改器,检测颜色是黑色和白色,这是 大明镜,是一个母鸡的公寓。旋转,旋转一百八十度, 这是判断切换,切换点切换,如果感应到黑色的话就会发出声音,以五十个功率旋转二点五圈,嗯,如果点出到白色就发出声音, 以复古型的工艺旋转四圈,如果没有点刺到颜色,大型天机停止运作, 等他退出来。
57一切郑好 01:00查看AI文稿AI文稿
01:00查看AI文稿AI文稿tv 三课程之单光巡线机器人本节课任务是在驱动底座上安装颜色传感器,使机器人能够检测并跟踪线路进行移动。我们先来计算一下平均光感值,在显示器上选择相应的连接端口,选择反射光线强度模式,黄色桌面的光感值是八十三, 黑线的光感值是九,计算出平均光感值为四十六。我们来编写程序,利用颜色传感器的反射光线强度 来判断是否检测到黑线,如果看见黑线, b 电机开始慢速运转 c 电机停止运动,同时利用反射光线强度进行判断是否看见桌面,如果看见 c 电机开始慢速运转 b 电机停止运动,重复执行此程序,看一下效果怎么样。 哇哦 nice!
105可可爸爸 00:43
00:43





猜你喜欢
最新视频
- 6689武器大师