excel如何实现中值滤波
领导要求计算评分中的中值,首先什么是中值?中值又叫中位数,是指呢?一组数字由低到高排列,然后呢返回最中间的那个数字,这个数字就叫做中值或者中位数。 我们来看一下,比如说一三、五,这三个数字由低到高排列,三个数字,他的中指是哪个呢?他的中指就是三。 再看,比如说一、三、五、七,这是四个数字,他的中指是哪个数字呢?就是中间两个数字的平均数,三和五的平均数, 三和五的平均数是几呢?是四,那这就是中值,也称为中位数。好,我们看一下具体怎么来求用哪个函数呢? 我们可以用这么一函数, media 函数, m, e, d, i, a, n, table 键 fx。 看一下参数框。 第一个算数是他要计算的区域,也就是平分一到平分七,好点确定就可以了。公式下拉好,这就是每组的中指, 这就是领导想要的结果。右侧是操作要点,供你学习,谢谢大家。

粉丝1875获赞1.2万
相关视频
 01:17
01:17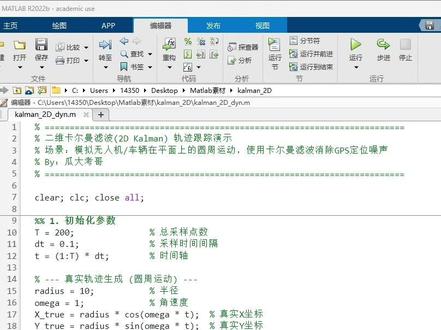 00:28查看AI文稿AI文稿
00:28查看AI文稿AI文稿昨天给学弟写了个一维的卡尔曼滤波,今天学弟又问我二维的怎么做,今天花了一早上时间写了一个二维的几十行代码,轻松搞定来看效果, 两侧是含噪声的 g、 p、 f 二维位置,用来模拟追踪无人机或车辆在平面上的圆周运动代码。放评论区了,关注我,明天更新三维的。
1252瓜大考哥 00:34查看AI文稿AI文稿
00:34查看AI文稿AI文稿分享十二个高级工程师常用的绿波算法,学会这些,月薪过万也是轻轻松松!一、线浮绿波法。二、中位值绿波法。三、算术平均绿波。四、地推平均绿波法。五、中位值平均绿波法六、线浮平均绿波法。 七、易接滞后绿波法。八、加权地推平均绿波法。九、消抖绿波法。十、现氟消抖绿波法。十一、低通绿波法,十二卡尔曼绿波法,这些你都会吗?
 01:03查看AI文稿AI文稿
01:03查看AI文稿AI文稿哇哦,这咋弄的呀,牛逼吧!这个就是现在超火的迪卡尔爱心,一个函数就能教你搞定安排。首先在第一个单元格输入 x, 在 第二个单元格输入 y, 分 别代表了 x 轴和 y 轴,然后在 x 轴下面输入负一点八一,然后点击填充, 选择序列,勾选列,把不长设置为零点零一,中值设置为一点八一,点击确定,这个就是 x 轴的数值范围,然后在 y 轴下面输入这个公式,双击向下填充,点击文件, 选择选项,点击重新计算,勾选叠带,计算最多叠带次数,输入为一,确定, 然后在这个单元格里输入等于 c 二加零点零五,这里的数字代表了爱心的曲线变化速度,数值越大,速度越快。 选中这两列数据,点击插入,选择散点图,这里任选一个,再调整一下大小,把这些多余的数值全部都删掉。最后按住键盘, f 九新型曲线图就动起来啦,你学会了吗?
7425怼怼办公技巧 02:51查看AI文稿AI文稿
02:51查看AI文稿AI文稿大家好,我是理工,咱们之前把电容家族捋了一遍,今天聊聊他在电路里的黄金搭档电感。如果说电容是个水库,那电感就相当有脾气的交通警察,专管电六怎么走电感的看家本领就藏在这个公式里,感叹 x l 等于二派 f l, 它意味着 频率 f 越高,感抗 x l 就 越大,电感对它的阻碍就越强。所以它的核心特性是通直流组交流,通低频组高频,你可以把它想象成直流电,是常驻居民, 畅通无阻。高频噪声是飙车档直接拦下。第一,滤波,和电容打配合。它经常和电容组成 l c 滤波器,比如派型滤波, 一个阻高频电打,一个通高频电容,手把特定频率的噪声筛掉,这是电源输出端净化的经典手段。第二,储能开关,电源的心脏。这才是电缆在当代电路里的核心舞台, 所有 dc、 dc 开关电源、 bug boost 都靠它来实现电压变换。原理就是电声、磁声。电开关管打开时,电流过电杆,电能变成磁能存起来。 开关管关闭时,电感释放,磁能变回,电能输出。储能。公式是一等于二分之一 l i 享存更多能量,要么加大电感量 l 要么提升电流 i。 第三,斜阵决定频率的标志。电感和电容一搭配,就能唱出一个固定的频率 公式, f 等于一二派 l c 就是 它们的音高标准,这在天线调谐收音机选台里是基本功。文档里算了, 想在二点四五 g h z wifi 频率斜震一个四点二纳亨的电感,就得配一匹法的电容,它决定电路的条斜点在哪里。第四,抗电磁干扰,专治各种毛刺, 尤其是过膜电感,它像一把梳子,把信号线或电源线上两根线里的过膜噪声同进同出的干扰给滤掉。而对有用的插分信号放行,你拆开网线接口, u、 s、 d 口里面带的小黑块多半就是它。第五变压器电感的亲兄弟。 变压器本质上就是两个电感线圈通过一个磁吸藕合在一起,初级线圈电流变化产生磁场四极线圈感应出电压,核心关系就两条。电压比等于匝数比, 想升压就增加刺激杂树,想降压就减少电流比,相反,电压升高,电流就呈比例减小,能量守恒。所以电胆虽然样子五花八门,从贴电、小电赶到大型变压器,但万变不离其宗。它利用阻碍电流变化的特性,在电路里扮演着绿波 储能、调谐、隔离和变压的观念角色。下次看到原理图上的 l, 就 想想这位交通警察正在执行什么任务,是拦住高频噪音还是暂存能量做变换?想通了,设计思路就清晰了。
99电子李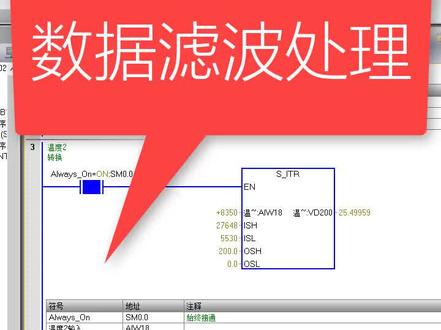 05:26查看AI文稿AI文稿
05:26查看AI文稿AI文稿大家好,应一位粉丝的要求啊,想要看一下模拟量滤波程序,我们看一下思路啊,这是我们模拟量转换程序, aw 幺八是模拟料疏通道,我接的是零到二百度这个凉城的 变速器转换出来数值当前是二十五点四几,我们看这个数值啊,是有波动的,对吧?我们如何将这些 波动给滤除,或者说排除干扰啊?我们为什么要进行滤波?看一下。第一,我们要过滤干扰啊,过滤 不必要的峰值,过滤不稳定数值,最重要的是我们要保证数据的真实性。 我们看一下数据过滤的这个原理啊,我们有实时数据啊,我们建立一个缓存区,当我们实时数据跟缓存区不等的时候,也就是我们实时数据发生变化, 我们就将实时数据传递给缓存数据啊,传递完以后呢?如果实时数据和缓存数据相等 啊,我们经过延时,经过一个延时,假如说我们三丁五百毫秒, 当实时数据和缓存数据五百毫秒相等,时间到了以后, 我们将缓存数据给了显示数据,这样的话我我们就形成了一个流程啊,实时数据传递给缓存数据,缓存数据和实时数据进行比较,如果他俩想等,并且时间超过五百毫秒再进行显示, 这样的我们有效的过滤了。呃,波动过快一些,峰值接通时间没有超过五百毫秒就不予以显示 啊,有利于提高数据的稳定性。第一步,我们将我们拿到的实时数据 vd 二百乘以十,我们将拿到的数据扩大十倍啊,存放到 vd 四百里边, 然后 vd 四百再区整,让的让的指定是区整啊,这个是小数点后边四舍五入的区整。接下来我们看一下 数据的判断, vd 五零四是我们的缓存区, vd 五百是温度显示扩大十倍以后,整形显示。当 vd 五零四等于 vd 五百的时候,我们进行滤波延时,延时时间是 五百毫秒啊,五百毫秒接通以后我们做处理,五百毫秒接通以后呢,我们可以将 vd 二百这个实时数据给了 vd 二幺二 啊,这个是我们显示之一,显示之一啊,另一种情况呢,是我们将 vd 五零四, vd 五零四是我们缓存数据啊,变成十岁, vd 五零八变成十岁以, 然后呢,我们再利用除法指令 vd 五零八除以十,再变成我们的真实值 vd 五幺二,当 vd 五零四不等于 vd 五百时, 将 vd 五百传送给 vd 五零四,这里是一个实时数据的传送,有人会问,为什么啊?这两个程序这样编写, 我们首先进行一个滤波啊,滤波先判断等于等于,然后再进行传送,如果我们先进行数据传送啊,这两个数据调换啊, vd 五零四和 vd 五百,他们两个数据是一直是一模一样的啊,这样就起不到滤波的效果了啊,大家可以去测试一下,大家看一下,我们把这个温度加热了一下,然后看温度往下降,这样递减的一个过程啊, 我们上边的数据啊,就是小数点后边一位,小数点后边一位,你看为第二百的实时值 变化的比较快,对吧?而我们这个处理后的数据呢,显示变化的比较平稳,对吧?其实我们将处理以后的数据啊,逐步进行传递,看看这个 vd 二幺二,显示的效果也不是太理想,对吧? 所以说我们要利用缓存数据,再变成十数,再除以十,这样显示效果比较好。 这里有两个测试,一是滤波时间,滤波时间我们要根据实际情况去选择,这里是五百毫秒,你可以变大,可以变小,如果你的滤波时间变得特别大,你 你的数据显示就会出现阶梯性,这个变化也不太好,不是平滑的变化啊,所以说这个适当的小一点。 关于网吧这个放大倍数,取决于你保留的数据精度,如果你要保留到啊小数点后边两位,这里就扩大一百倍,再缩小一百倍啊,道理是一样的。
488徐工PLCC 05:21
05:21 00:30查看AI文稿AI文稿
00:30查看AI文稿AI文稿分享当片机常用的绿波算法,学会你也能成为高级工程师!一线伏绿波二,中位值绿波三,算术平均四,地推平均五,中位值平均六,加权地推平均 七,一阶智厚八,二阶 i i r 低通二 r a m cpu 实时性商指标选型,对号入座在编码稳。
 00:53查看AI文稿AI文稿
00:53查看AI文稿AI文稿今天分享的是强化学习加卡尔曼滤波。在自动驾驶、无人机导航等场景中,环境噪声是智能系统的拦路虎。强化学习擅长从交互中优化决策,却因观测不准陷入训练不稳定。卡尔曼滤波式状态估计利器能从噪声中提取有效信息,却缺乏策略优化能力, 两者结合正成为破解感知决策闭环难题的关键。复杂场景需求升级让单一算法局限无人机避障需预测轨迹与调整策略。 机械臂控制中卡尔曼绿波的精准状态估计可为强化学习提供可靠决策依据。状态估计加策略优化携同成新趋势前沿研究显示,卡尔曼绿波优化观测空间可减少训练波动, 强化学习调整绿波参数能提升适应性,这种融合正突破传统边界,为动态场景决策提供更优解。另外,我给大家整理了十篇强化学习加卡尔曼绿波的最新论文及代码,方便大家参考。
14芒果-论文指导







