efort机器人示教器教程调坐标

粉丝8521获赞1.9万
相关视频
 02:43
02:43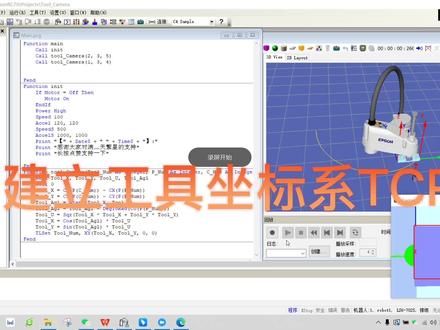 05:10查看AI文稿AI文稿
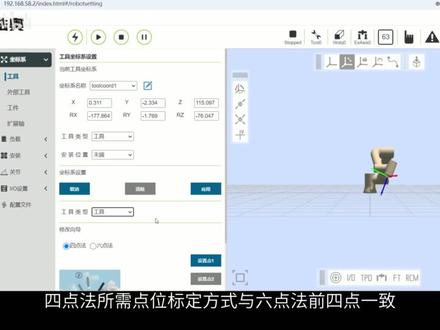
05:10查看AI文稿AI文稿今天我们来学一下工具坐标系,工具坐标系顾名思义就是在机械螺的末端装上一个弓箭,然后以这个弓箭建立坐标系, 然后我们在模拟仿真中添加一个相机,然后这是相机的成像, 然后相机的成像。我们先看一下默认的坐标系,默认的空间坐标系是在机械手中心轴上面最末端, 然后我们怎么把它转化到我吸头的上面?首先我们要看一下建立工业坐标系的指令, dlset 叫设置显示工具图标系, 然后工具坐标系编号,这里是显示 x、 y、 z 角度,然后我们来看一下在图上面是怎么样的,这是机械手,这是机械手的中心,就是现在的坐标系零这个。 然后我们装了弓箭以后,他的坐标系,我们想建立 a 点, 然后他的 a 是在 x 方向的投影, b 是在外方向的投影,这是高度方向, c 是旋转角度。 然后我们来看一下 我们现在建立三个点,因为我们现在建立两个坐标系嘛,一个一和二,然后都是意思三点是现在这个 空间作为系的零,然后的话四点和五点,我们看一下, 我们先看一下三点, 好,我们在相机试 以内,然后先找到弓箭坐标系,嗯啊,我们弓箭坐标系对齐这个位置,我们找到四点,就是末端也对齐这个位置,然后我们就可以设定这是三点坐标系,我们再试一下四, 好,这是四点的,再看一下五点, 好,倒是对齐这个位置,对齐这个位置以后,然后我们执行一下程序。 好,我们来看建立完的两个字,外形, 先去把那两个左边洗, 这是零,这是默认的啊,这是一新建的,这是二新建的, 当我们接手上面做两个家具,在左面一个家具,右面一个家具,就可以通过这两个家具分别建立两个坐标系。 如果我想让他转个角度,就在第三个菜市,我们来看一下这条指令。第一是 选择建立的中间做梅西的编号,然后这个 xy, xy, 如果是想让他转个角度,就在这个第四位上面,然后添加一个角度,这个是在高度方向下调节。我现在把这个电力空间坐标系 通过各种各样计算,比如说通过赛印扣,赛印探腻他,然后根据这个原理通过两点坐标, 然后我们通过计算得到供电坐标系上面的 x 就是 a 的位置和 b 的位置。
59繁星 00:55查看AI文稿AI文稿
00:55查看AI文稿AI文稿想学艾夫特机器人的,一定要看完这个视频。科技时代的到来,中国大力发展制造强国战略,大量企业开始向智能化转型,这就需要大量人才。预计到二零二五年,先进制造业领域人才需求将超过六千万, 科技企业更加关注人才,每款产品的使用者也是产品的推销员,推销员越多,产品销量越好,像机器人行业就面临着巨大的人才缺口。现在我手中的这本书 工业机器人入门使用教程,艾夫特机器人采用橡木质教学,从拆箱、组装、参数设置、 程序编辑、自动运行等方面教大家如何操作艾夫特机器人,并且还有教学视频,手把手指导,学高端技能不难,难的是从此刻就下定决心学习。点击下方链接,一起学习艾夫特机器人!
 03:55
03:55 03:49
03:49














