米思齐如何同时控制两个舵机

粉丝2047获赞6109
相关视频
 05:25查看AI文稿AI文稿
05:25查看AI文稿AI文稿要让这两个舵机同时运动起来,只需要做对三件事情就可以了,第一选对硬件,第二会接线,第三会使用电脑,使用图形化的编程软件,有手就行,非常简单。好,我们现在就开始, 我们使用到的硬件还是这个 e s p 八二六六这个开发表套装。然后是这个两个舵机, 还有一些杜邦线。我们先说一下这个线怎么接吧?多机是有三根线的,他这个棕色是负极,红色是正极,这个黄色的是信号线。 我们要把这个多机的供电线接在这个八二六六,八二六六这个开发版的这个五伏上边,棕色的线接下边 gd 红色的线接五伏。这里不要接错,因为舵机它的功率稍微大一点,直接用八二六六版载的三点三伏,它的供电是不够用的。然后说一下这个信号线,信号线我们要接在这个八二六六的输出端口上边,接多少?接十二十三吧, 十二十三对应的管角是这个第六和第七,接在这两个管角上,不用管外头的第六、第七,我们知道这个第六,第七是十二管角和十三管角就行了。好,我们现在线接对了,开始进行编程, 我们打开米斯奇的编程软件多机,在执行器里边点执行器电机,然后把这个多机给拖出来。刚才我们用到了两 个管角,先把管角找见十二管角和十三管角, 十三管角,然后我们这个管角上边有两个参数,一个是角度,一个是延时,他是零到一百八十度可以调节的,我们现在就是在调试状态,我们先让他从零度转到这个一百八十度, 先在控制里边给一个初始化,十二拐角是零度,十三拐角也是零度, 出入画之后我们让他这个 转到一百八十度,下边也转到一百八十度,然后给他一个延时 一千毫秒之后再让他从一一百八十度转到零度。 程序就是这样的,很很简单,我们现在就是插上数据线,把它这个程序上传一下 六号银角,看一下串口,串口已经打开, 我们点击上传 好了,程序是上传好了,上传好程序之后,我们看见这个有电脑的 usb 接口 给这个八二六六供电,它是带不动这两个多机的,所以我们现在要把它给插拔掉,然后就是再找一个六到二十四伏之间的直流电源,然后我们给它插上就行了。 现在多机就开始动了,我们发现他在颤抖,他不会动了,这个是什么情况?这个是因为我们刚才设定程序的时候给他的延时太短了, 他他回不来了,所以我们要再给一个一千秒,一千毫秒的延时,我们再把程序上传一下, 再来看一下, 看现在我们加上这个延时之后,这个多机就可以正常的零到一百八十度来回的旋转了。好了,今天的视频就到这里,感谢大家,谢谢大家的收看。
319鱼缸学电路 05:19查看AI文稿AI文稿
05:19查看AI文稿AI文稿实验十一,可控舵机零一工坊文老师主讲 本实验使用两个主要的设备,分别是十 k 电位器和小型舵机电位器。第一个接口连接主板 gnd 接口, 中间接口连接主板模拟 a 零接口,第三个接口连接主板五福接口。舵机黑色线连接主板 gmd 接口,绿色或橙色线连接主板数字九接口, 红色线连接主板五伏接口。使用面包板边上的正负接口区连接两个设备的正极和负极的接线,再连接到主板,可以有效减少主板接口的占用。 电位器是一个组织可变的电阻,通过中间引脚调节组织随着电阻值的变化带动电压的变化,通过模拟 接口可读取其电压的数值,返回零到一千零二十三的数值,对应零到五伏电压。本实验将对应的数值转换为零到一百七十九的舵机旋转角度, 已达到旋转电位器引脚驱动舵机同步转动的效果。程序主要逻辑如下,一、对舵机进行初始化,指定主板接口九二、读取模拟接口 a 零的数值复制到变量。三、将变量的值 从零到一千零二十三的数值区域映射到零到一百七十九的旋转角度。四、旋转舵机到指定的角度 映射空间,将变量从一个区域的数值映射到另一个区域的新的数值函数有五个参数,第一个是传入的变量,第二个是当前范围值的下线,第三个是当前范围值的上 上线,第四个是目标范围值的下线,第五个是目标范围值的上线。举例,零到一零二三区域的五幺二将被等比例映射到零到一百七十九区域的九十 开始硬件接线,主要设备是电位器和舵机,将电位器接入到面包板中,电位器有三个接口,第一个接口接黑色跳线, 跳线另一端连接面包板的负极区域,第三个接口接橙色跳线跳线另一端连接面包板的正极区域,第二个接口接绿色跳线 跳线另一端连接主板模拟 a 零接口。开始舵机的接线,用跳线连接舵机输出的三个线,红色跳线连接舵机红线,橙色跳线连接舵机呈现灰色 跳线连接舵机灰线将红色跳线连接到面包版正极,灰色跳线连接到面包版负极,橙色跳线连接到主板数字九接口用跳线连接面包版正极区域与主板五福接口,用另一条跳线连接面包版负极区域与主板 gmd 接口。 硬件接线完毕, 开始电脑端编程。拖入变量空键命名为 pot pin, 类型未整数,复值为零。复制变量空键命名为 val。 删除默认复值, 拖入初始化控件,拖入舵机初始化控件设置管角为九,脉冲时长为默认值。 拖入模拟输入控键,将管角设置为 port pink 变量复制到 val 变量,该操作读取电位器的模拟数值,数值区间为零到一千零二十三。拖入映射空键,第一个参数设置 val 变量, 第二个设置零,第三个设置一千零二十三,第四个设置零,第五个设置一百七十九。将新的数值复制到 well 变量,意思是讲 well 变量从零幺零二三的数值区域映射到零到一百七十九的旋转角度, 拖入舵机控制控件,设置管角为九,设置角度为变量 val, 设置延时为十五毫秒。 检查没有错误后保存文件,点击编译,如果编译没有出现异常,则可以连接主板 usb 线,将代码上传到主板中。 实验效果如上旋转电位器后,舵机相应地旋转一定的角度。 总结,本结结合课程内容,陪伴着朋友们一起学习可控舵机实验,学习硬件接线米思琪编程代码上传执行,让大家可以更加了解耳朵 inno 电子原型的相关操作,提升了思维能力,动手能力。
87零一工坊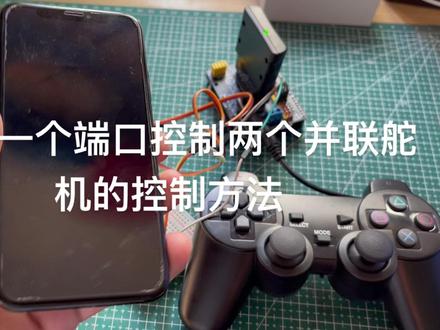 02:06查看AI文稿AI文稿
02:06查看AI文稿AI文稿朋友们大家好,这里是小丁锤创客,今天我们来探究一下用同一个艾欧口来控制两个舵机能否实现就是并联两个舵机啊,看他这种方法能不能成功。呃,这种是有用途的,比如说我们这个机械臂, 他在这一个比较,嗯,重要的比较这个受压力比较大的部位安装了两个舵机。并联的舵机 啊,用两个舵机驱动一个部位,那么如何来控制他呢?我们我们设想的是用一个 io 口输出并连两个舵机, 并联两个座机来控制一下,试一下,我们不知道这个试验能否成功,我们来来探究一下,这是我们自己做的啊, ps 二控制版,这是一个 ps 二遥控,这,这是一个杜邦,杜邦接线板, 这两根是电源线,直接,呃,直接接在那个板子上面的,然后就是艾欧口,我们通过的一个面包板把这一个艾欧口引出来,把它分成两个, 这两个舵机现在我们来控制试一下啊, 通过控制我们发现他可以实现控制两个舵机,两个舵机是一样的动作, 那看来看来这个控制方案 是可行的,那么我推测一下,如果给这个地方再并连三到五个舵机,他还是可以同时 运行的,运行运行效果还可以。
23小钉锤创客 16:04查看AI文稿AI文稿
16:04查看AI文稿AI文稿坐直控制坐直呢,作为一个直行机构,是电极的一种。 上半节先学习他的原理,认识剁鸡,剁鸡是一种未知私服的驱动器, 主要由外合电路板、无核心马达、齿轮与位置检测器所构成。他的工作原理由接收机或者单片机发出信号给多机,其内部有一个急诊电路,产生周期为二十毫秒, 宽度为一点五毫秒的基准信号。将沃德直流片至电压与电位器的电压比较,获得电压差输出。经由电路板上的 ic 判断转动方向,在驱动 无核心马达开始转动,通过减速启动将动力转至百臂,同时由位置减下去送回信号,判断是否已经达到定位。使用于那些需要角度不断变化并可以保持控制系统。 当电机转速一定通过其联的减速器人带动电位器转转,使得电压插为零,电机停止转动。一般剁机转动的角度范围是零到一百八十度, 这个呢,就是斗鸡,他转动的角度呢,是通过皮达边控制的,皮达边呢,就说是脉冲宽度调制他的信号的占空笔来实现标准皮达边脉冲宽度调制的信号周期 固定为二十毫秒五十克制。理论上麦宽分布应在一到二毫秒之间, 但是呢,事实上外宽有零点五到二点五毫秒之间,外宽和多机的转角为零到一百八十度相对应啊,有一点直接注意的地方,由于多机牌子不同,对于同一信号,不同牌子的多机转转的角度有所不同的啊,要注意的 比,这个是零度的时候啊,在一千毫一千微秒四十五度的时候呢,是一千二百五十, 一百八十度的时候呢,是两千为秒啊,这个呢就是他的一个简单的介绍, 还有他的角度啊,是来自自动控制线的持续脉冲所产生的啊,这种控制方法呢,叫脉冲调制 脉冲的长短决定剁肌转动多大角度了,比如一点五毫秒,脉冲呢,会转动到中间位置啊,这个是对一百八十度剁肌来说的,也就说是九十度的位置啊, 当这个控制系统发出指令,让舵机移动到某一位置啊,并让他保持这个角度,这时呢,外力影响不会让他的角度产生变化,但是这个是有上限的,上限就是他的巨大扭率, 除非控制系统不停发出脉冲,稳定剁肌角度啊,剁肌的角度不会一直不变。当剁肌接收到一个小一点五毫秒的脉冲输出足呢,位于中间位置为标准,逆时间旋转一个角度,收到脉冲大于一点五 头苗,这情况呢,刚好相反,不同品牌甚至同一品牌,不同多级都会有不同的最大值和最小值, 一般而言,最小麦称为一毫秒,最大麦称为两毫秒,意思就说他会有一点十级误差啊, 零度到一百八十度,他对应的不一定是一到二,或者是零点五到二点五之间都有可能的,意思着这个误差大家自己的调节啊,这里有 有一张图啊,这个最小脉冲的时候呢啊,我们看到这个宽度啊,脉冲宽度是一毫秒,他在零度啊,这个位置 中间脉冲啊,他这个高电瓶的状态,他是脉冲宽度呢,是一点五毫秒,他在九十度 巨大脉冲呢,这个高电瓶取碎的时间,他的脉冲宽度呢是两毫秒,他在一百八十度啊,一般剁机呢,在我们编程的时候呢,最好留出几度啊?比五度啊,最小最大的时候一百七十五度啊,这样留出五度给他一个空间, 这个坐骑呢保护他起到一定的作用,因为他打到巨大的时候很容易把齿轮打烂,所以他在编程做实验的时候呢,我们预留一点空间 给他,这样的效果会好一点啊,好,这个型号啊,多机有多种规格,所有的多机都有外接三根线,分别用中红橙三种颜色进行区分, 由于多级品牌不同,颜色也会有所差异,一般棕色为接地线,红色为电源正直线,橙色为信号线啊, 这刚好跟我们的这个拓展板上的这个七啊对应,中间呢是 v p 大便呢是 s 信号线, 这个要注意啊,我们要接到带 pwm 的银角上面才可以了。大家还记得 part 边银角是哪一个吗?是三五六九十十一啊, 这几个银角带皮带边部功能的,其他银角是不带皮带边部功能的,这个要注意啊,好,这个呢就是九克剁鸡或者叫四伏电击啊,他的尺寸啊,因为他的重量呢是九克,所以呢叫九克鸡剁鸡, 它里面呢有这个摇摆,还有一点小螺丝啊,这个要注意啊,这个剁肌不要使用电脑的 usb 口供电,因为剁肌需要电流太大,可能会烧坏电脑, usb 口 应该用外部电源供电,就说不带负载的时候呢,还可以勉强工作,这个带了负载啊,一定要用这个手机五伏充电器进行供电,或者用充电宝进行供电啊,这里呢有一个模块推荐一下啊,就两路独 五伏电源稳压模块,智能车电源降压模块,他可以驱动八路舵机供电,这个呢在这里面你可以接八路舵机,这个呢是接舵机的这个输入信号线, 有了它我们就可以驱动八个斗鸡啊,好,这个是推荐的一个产品,所以损配的一个配件,单个斗鸡做实验呢,可以用这个五福宫殿啊,好,我们做一个斗鸡摇头实验啊, 首先要有一个剁级模块,这个模块呢可以控制在零到一百八十度之间呢,他有两个参数,一个呢是针脚,可以在零到十三角之间选择,但是一定要带屁。大边输出接口的这个 真角角度呢可以在零到一百八十度之间啊,这个设置的好,我们大家编程的时候要注意啊,剁机呢采用配大边输出控制三五六九十十一啊,口呢有配大边功能啊, 我们接线啊,就说我们接到这个第九啊,这个带皮带编功能的这个银角上面。好,现在呢我们就编一个程序啊, 这个编程的时候呢要注意啊,剁鸡的这个转动的角度和你使用的角度可能有视为的边差 于写入九十度,但实际没有达到或者超过九十度,会进行微调来达到相应的角度啊,建议呢加减五度。好,现在呢我们就打开这个米西奇图形软件 做两步工作,一步呢是绑卡的选择,第二步呢是短号的选择。好,我们开始编程,这里呢叫极刑器啊,剁鸡鼠的极刑器打到电极这里面啊, 电机,这里面有很多种啊,之前我们学过这个固定电机也叫机,这个电机诺基呢也叫电机啊, 好,我们就直接啊就把它拿出来,这个管角呢我们接到了第第九个啊, 这里呢有一个角度啊,就说我们先梳个九十度, 再看一下这个肚脐里面还有什么参数啊,还有这个会读取读取的他的角度,就说现在他在什么位置可以读出读回来。还有一个看一下啊,还有这个 这个脉冲时长啊,这个呢就是说可以加一,加一啊,可以设置好,其实我们有了这个呢就可以控制剁鸡了,现在我们在九十度,我们先把它保存一下吧,把它另存一下啊, 这呈现一个新的文件夹,斗鸡第一个实验斗子 九十度,九十度呢,一般也叫归中啊,也叫归中实验。好,我们上传一下 啊,上传完成,这时候呢要把剁子接这个针角我们要注意啊,黄色这根线呢是信号线,中间这个呢是剪地,我们接到第九个角 好,接进去的时候听到一声音已经归中了,这个时候呢在这个这个包里面呢有一个这个 e, 这个时候呢归中正呢,他是在中间啊,这个时候我们看不到他的效, 所以呢我们要把它程序修改一下,就可以拿一个岩石 再复制一下九十度,我们再把它调到五度, 稍微有点延时。上传一下啊,现在他就在九十跟五度之间摇摆 啊,我们看一下啊,九十度跟五度之间摇摆,就说摇头就可以增加一点啊,就说 再复制一个,我们在一百七十五度之间摇摆啊,稍微严实一点啊,我们在上传, 现在他的角度呢,就比较大了, 对吧?从零到九十,再到这个一百八十,一百七十五度, 好,这个剁肌呢,就很简单了,就用 pla 片来控制 这里呢,还可以读取跺脚保存一下,我试一下这个在电机里面,这个读取他的角度啊,这个接到了第九个眼角, 好,我们这先这个把它关掉吧, 我们另乘一下第二个实验, 读取啊, 读取角度啊,好,这个就不要了,读取角度呢,我们可以用这个创口进行显示啊,我看一下行不行啊?用九六零获得力,这个这个外行。好,我们上传一下。 好,现在剁鸡呢,是随机的打开串烤啊,还是九十三度啊?现在呢?这我们看一下现在他的 位置呢,是九十三度啊,是动不了的了,九十三度的位置。好,这个呢就是读取他的位置啊,这个实验 我们想一想啊,这多级工作方式啊,在现实生活中用在哪些方面? 大家尝试一下能不能模拟出生活中中的一些例子,比如我们地下车库啊,这有个栏杆啊, 就说当有车来的时候,这根杆要打开这个小车进去, 还有呢就说小刺切,这挡风玻璃啊,上面有一个雨刮 啊,由下雨的时候呢,这个刮呢,会把这个水挡开啊,这个呢可以结合啊,这个前面讲的这个雨滴传感器啊,或者水位传感器来做这个实验。 大家地下车库呢,可以结合超声波模块来做这个实验。有车子进来的时候呢,我们打开这个斗气,好总结一下啊,就掌握了斗气的使用。 作业边写一个车库自动入口开关小实验啊,这个刚才讲了,就说有车过来的时候,我们的超声波感应到 这个障碍物,或者红外线感应到障碍物,我们打开这个栏杆,电脑采购最丢脑创造机器人专用智能手机底盘,做一台超声波摇头 b 站智能小车啊,这是另外选配的。好,这个呢就是最丢脑穿过机器人啊,包括两个部件,一个呢是这个二三二九三 d 拓展板,还有呢是一个智能小车底盘。好,这个超声波 装在这里啊,这个主要是这个剁鸡,有了它之后呢,就可以做一个超声波摇头实验,超声波避障剁鸡啊,剁鸡超声波避障小车 就是选配的,也可以采购这个最丢落创可机器人,他的这个拓展版呢是 l 二三二九八 p, 可以驱动四个电机的啊, 还有呢可以采购船上人的,这里呢也可以装一个斗鸡进行这个摇头实验。好,斗鸡的原理呢,我们就 简单介绍到这里,上节课前呢,我们在结合他用来做一些更好玩的东西,比如做一个摇头风扇等等。
138星慈光 00:58查看AI文稿AI文稿
00:58查看AI文稿AI文稿今天我们来讲一下萝卜特别扯,上面插入了我们的 michael bitter vr 这块主板来控制我们的剁肌这么一个操作。那么请看我们的屏幕, 我们使用的依然是 kitty block 这么一个软件。我们来看一下我们这个地方,我们使用的是按下 a 键,让我们的舵机转负四十五角度,按下 b 键,让舵机转二百二十五角度。 另外打开我们的代码窗口进行上传就可以。上传完成以后,我们来看一下时机的控制,按下 a 键,我们的舵机转负四十五的角度,按下 b 键,我们的舵机转正的二百二十五角度。 通过这一小段的讲解,大家学会了没有?如果学会的话,点个赞,点个关注,谢谢!
 00:29查看AI文稿AI文稿
00:29查看AI文稿AI文稿今天咱们再来说一首多集,大家看一下,这首多集是从零度转到六八十,然后再从一百八十度到零度,嗯,有很多小伙伴们说想让这个多集转的慢一点该怎么办?他们想到说适合会冲开延时,再给大家调一下时间,如果这样的话他不会转,把他十中间的间隔也就差点就说咱们把它调成两千, 大家看一下他的速度并没有变慢了,这样他就是一个以慢速的,匀速的重量在八十度之间的磨合,如果想他再慢一点,就可以把二十调成三十,要不然自己来试一下。
281大大大雅编程













