dnf查pidvid方法

粉丝3.2万获赞6.1万
相关视频
 00:58查看AI文稿AI文稿
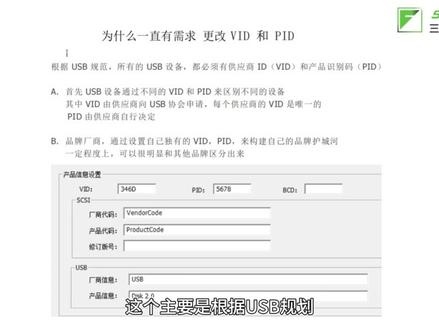
00:58查看AI文稿AI文稿一心课堂之为什么有需求更改 vid 和 pid? 大家好,今天和大家讲一下,为什么一直有需求需要更改 vid 和 pid, 这个呢,主要是根据幼儿 b 规划,所有的幼儿 b 设备都必须有供应商 id, 也就是 vid 和产品识别码 vid。 首先呢, urb 设备是通过不同的 vid 和 pid 来识别不同的设备的, vid 呢,是供应商向幼儿 b 协会申请,每个供应商的 vid 都是唯一的, pid 呢,是供应商自行决定决定去设置的。 然后呢,品牌商,他通过设置自己独有的 vid 和 pid, 可以构建属于自己的品牌附赠盒,一定程度上呢,可以可以很明显的其他品牌进行区分,在 再加上自己独有的厂商代码,产产品代码,还有这个厂商信息和产品信息这些标志,然后还有卷标设置这些来搭配使用。
 02:58查看AI文稿AI文稿
02:58查看AI文稿AI文稿提升穿越机的操作手感,只需要调整 pid 循环这个参数就 ok 了。今天我们来到 beta flight 地面站保姆级教学的第四课设置页面的系统设置。在了解 pid 循环参数之前,我们先了解一下穿越机的姿态控制逻辑。 如果说我们在遥控器上面打了一个向左翻滚四十五度的这么一个指令,那么接收机就会收到这个指令,然后把这个指令传送给我们飞控上的 mcu, mcu 会给电条一个指令,就是右边的电机 转速快一点,左边的电机转速慢一点,然后飞机就会往左边倾斜,那么他怎么知道倾斜到什么样的程度,应该去停止嘞?啊?这个就归功于我们的飞控上面一个重要的一个软件叫陀螺仪, 陀螺仪时时刻刻的在采集数据,它随向 mcu 报告啊,现在我们的角度是多少是多少度,到了我们想要的四十五度之后, mcu 就 会告诉电机旋转啊,就保持现在这个状态, 这个就是我们的控制逻辑。解了穿越机的控制逻辑之后,然后我们来看一下地面站的配置,然后系统设置这个板块, 这里面的第一个选项,陀螺仪的更新频率,这个是不能更改的,这个是取决于我们陀螺仪的采样频率,现在四二六八八的话,呃,这类高端一点的陀螺仪都是八 k 的 采样频率,有一些比较低端一点的可能现在是四 k。 下面这个 pid 循环可以供我们选择,比方说我们也选择八 k, 那 么就是陀螺仪的每一次采用都会参与到 pid 的, 呃。预算选择八 k 的 话,需要的算力就会更多,呃,一般的来说建议 h 七四三这一类的芯片选八 k, 比方像你是 f 七二二或者是 f 四零五,那么你就老老实实的选四 k 就 好了。如果你选八 k 的 话,可能会出现呃,算力过窄,导致 穿越机炸机或有卡顿的这种情况啊,很影响你的操作手感,飞行安全的。下面的话,这个加速度计这个是必须要的,呃,如果没有的话没办法飞行的。下面的气压计在我们的穿越机飞空里面几乎来说都带了的啊,用来看我们的飞行高度 啊,它是通过起飞的时候的海拔高度来计算的,涡轮打开就 ok 了,不要去关闭它。力计,一般来说我们穿越机的飞空里面是没有的, 上面带的磁力计其实也没有多少用,穿越机的机架很小,他会受到电机啊和电条的干扰,数据也没多少用啊,大家买飞动的时候也不要去在乎有没有一层磁力计, 今天我们分享的就是系统设置这个板块啊,其他的这些选项我们会在接下来的视频会讲解到。
107木二创客 37:25
37:25 19:56查看AI文稿AI文稿
19:56查看AI文稿AI文稿各位同学粉丝下午好,我们接着上一节课,哎,这个 pid 的这个课程讲解,这一节课主要是调试, 我们把这个是程序写完了,就是常用的这些管角都写完了,那我们来调试,我们监控, 我把我的那个硬件的这个给同学们看一下,我的就是这个, 我的就是这个,用这个变压器,哎,这个交流 来经过这个整流,再加个接触器,没有不带继电器,就给这个温度,就是加热棒加热嘛,这就是一个温度变速器嘛。 那大致底线我就不用讲了, 我们现在设置三十五度, 那我们点这个, 那我们点这个,像一个斜口拳的,这个就是主太是屌丝面吧。 那我们点进去,他这个采用时间是零点三,我们把它修改成零点五,现在就开始调。 那你看我们这里用这个玉调节的话,他这里就报出了启动玉调节,是出错过程值接近于设定值, 那我们就把它改成精确调整,他会提示的,这个挺智能的,现在就没有了吗? 这个调试这个 pit 是一个漫长的那个,嗯,就说是有可能调几天,有可能几个小时,根据你的那个工程项目上的经验吗? 这个线大家都看得懂吗?这个 oppo 的就是输出的这个温度 啊,有一个是就是 sp 的这个就是我们设定的这个温度,这个就是过程的温度 啊,说错了,这个 oppo 的是这个输出的百分比,就是这条线吗?百分比 这个也可以放大, 是现在他这个是完全的在加热吗?输入百分百, 这个百分百, 这是二十七点九五八六二度,我们设置的是三十五度, 是啊,他就从这里加热了吗? 二零八三的这个位置 看现在的实际温度是二十八点九,他是百分百的输出, 这是模拟量,也是百分百的输出,这个这个开关量、数字量就是闭合状态, 这个调节是一个漫长的时间,现在三十一点七七九, 如果你点上这个手动调节的话,他就会变成了,哎,现在三十二点八他就开始停掉了, 现在已经到了三十五点三十六了, 他这个缓冲 已经超过了我们设置的三十五。 这个塑料桶是微胖的, 他经过这一轮的就是降温,降到 应该是降到三十五点几,他又会动又会动作一次。 我在蹭这个的话,我就讲一下这上面的这些按钮的这个功能, 这个就是对你产生错误的话,就把它复位,复位,这个如果你调好了,就点这里上传到 pid 弹出去就行了,这里是转到 pid 弹出,也就是程序, 这里就是 这里就是采样时间,我们选择零点五秒,当然你根据实际情况嘛, 这个就停止了,十度停止精准调节,他这里都是智能的,你用这个绿调节跟精准调节,如果说是用的就是不那个复活线,呃,不符合现场的条件,他就会 提醒你, 那我们点这里转到 p i d, 长度就是这里积分二十, 这里有两个控制 去的类型,写 pidpi。 之前也讲过啊,这里都可以手动输入进去的,那我们就自动让他自动调节, 要调到这两条线重合的话,基本上就差不多了, 连这些他都有他的功能, 不过这种用的用的没那么多,应该显示时间范围。 那这两条线重说的话应该差不多了。 调这个 pad 都是要有耐心的。 到这里 是,你们看他这个是不是变小了呢?这就是这里,这两条线 是不是越来越越想小了, 要直到他重合了就可以了。 这你看我的这个又基本上可以了,这个情况他已经成活了。 三十四点九七五四,应该差不多了。 嗯,把这里起伏就是加热。哎,又关掉了。 就是这个开关量的话,又没有模拟量控制好。这你看没有就没有输出了吗?百分之一的这个 yeah。 这个十六点八就是我们左,我们查一下嘛,一条街启动出错就是他警告你 并了解启动出错过程,则处于接近者开始正确调节。 现在又潮了, 要关闭了 啊,这里活动就有点大了。 就是这个, 他这个到了三十五点一二零的时候就会有动作接通这里。这两条线是越来越靠的比较近了。 那他又那个不加热了。 这里模拟量给的是三十五斤。反正是有有一点点差别嘛。 是这个线是越来越,就是他的两根线靠近很近了。 现在我们看一下,我这调了好长时间啊, 看这个曲线都已经是重活了。 是我,我们是从这里调过来的 这个,这个 是可以,因为我没有那个模拟量的,那个输出模块就没那么稳定。我这个还差差这个两一度多 的样子。那应该超多精度在在那个就是按百分之来算的话,我这精度算多少?百分之一啊,那这里重活了吗? 好了,我们今天的模拟量啊。说错了, pid 的这个肯定就先讲到这里了,下节课见,谢谢。
260电气大佬 13:33
13:33 09:13
09:13 02:41
02:41 06:47查看AI文稿AI文稿
06:47查看AI文稿AI文稿pid 的数学公司中有积分汉为分,但会尽量说的简单详细一点,拥有自己就是对为积分不在行的人,如果这样而不理解原理蛮可惜的。 好,开始吧。既然说 pid 控制器,全民是比例积分为分控制器三个重要的东西,比例积分为分。 还有个重要的东西是 pid 只会用到温度差来计算,那现在看看为机百科上是怎么写 pid 控制器,直接跳到原理的地方,这个就是 pid 的计算公式。这公式包含的比例积分为分, k p 比例争议 k i 积分争议, k d 为分争议。这三个都是常数,以情况调整一误差设定值减目前值, t 目前时间掏积分变 变数。这三个主要影响 vid 数值。重点答案是误差一,这就是刚刚说的温度差。回去看公式,公式用加号分三部分,这三个分别就是比例积分为分, 而这三个都有包含这个误差一,也就是当前的温度差,当算是结果为证的时候继续加热,当为零或负的时候停止加热。接下来就开始了解比例积分为分,分别对应的数学及物理意义。 回击百科的说法是比例考虑当前误差,意思是如果温度太低就全力加热,随着温度上升等比例的减小加热力度。积分考虑过去误差,意思是看之前的温度变化来调整 开关温度的时间点为分,考虑将来误差,意思是预测未来的温度变化来达到启动加热的目的。这边就用国高中学位移的方式来辅助说明。先复习一下, 位移是 a 到 b 的直线距离,速度是位移,除以时间加速度是速度,差除以时间,同时也会叫 vt。 图下的面积就是位移, 而位移对时间为分就是速度。这个高中不一定会考,但都会提一下就是位移,如果是 x 平方,把平方放下来就是速度, 速度对时间为分就是加速度,相反就是积分。 cp 图下的面积就是速度,对时间的积分就是位移。回过来先讨论一件事, 为什么 pid 都是用温度差?回想一下以前跟热有关的公式, h 等于 ms 第二塔 t, 有没有发现那个 delt t 就是温度差,而算出来 h 就是热能。 知道这些后再看 pid 的比例批比例是考虑当前误差,就是和人判断一样,没到设定温度就加热,到设定温度就停止加热,所以比例公式只是单纯的温度差 换积分积分是考虑过去误差,这就是刚提到热量公式,需加热的设备没事不会坏,所以质量 m 汉比乐 s 不会变。假设从常温三十度加热到一百度,所需要的热量是固定, 所以温度就好比速度,热量好比位移。温度与时间的关系,积分后就是热量, 就是温度,时间关系图下的面积就是热量,这样有没有了解积分用途?这就是算出这个质量,这个比热从舒适温度到设定温度需要多少热量, 但是余温会提供多余的热量,导致温度过高,这个时候一样用温度差去计算会得到负值, 也就是今天这个加热器提供了余温,所产生的面积会被当负值去扣掉原本所需要的热量的面积,这样就达到提前停止的目的。 所以数学公式就是温度差一乘上取向时间掏,而每次都是计算从零到踢的加种,就是每次都是取当前面积大小。最后一个为分,为分是考虑将来误差为分的计算方式。目 前温度差减去上次取样的温度差除以时间,而这个时间就是依据取样的时间差,可以是一秒,也可以是零点一秒,也可以是零点零零一秒。那这怎么对将来误差做判断呢? 当外周插出来的时候,插会得到什么?没错,斜率,当斜率越大,表示这次曲样与上次有很大变化,例如突然从三十度变七十度,表示火力过猛。 当鞋率过小,表示这边是稳定加热或稳定的降温。当鞋率曲径零,表示温度稳定, 因为每次都是取歪轴的,本次温度差与上一次温度差 x 轴的曲让时间也够小,小到不需要担心曲线的问题,这就是为分。以上就是 pid 的 数学物理一一这个简易 pid 计算仪式表,这个表值方便理解,无法直接拿去运用来看这个表怎么设计。先给每次取量时间 t 等于零点一,预计到达温度是一百度, 初始温度是三十度,后面是 pid, 各个的值,系数都先给一,最后一个是加总 p 的数值就是系数呈上温度差。埃子,第一个是系数呈上温度差,呈上时间差,但第二个开始就是温度差呈上时间差,加上上一个加走后呈上系数 低值,是目前温度差减去上一个温度差,除以取央时间。最后当然是 pid 加重。而这边假设 每次间隔温度都会有一度的变化,当加总为证,下一个温度就会加上一度,加总为负或等于零,都是减一度。这样来看看最后几乎为何最后可以看到温度有震荡,但之后就平稳,这时候聪明的你有没有发现,这个模组是没有考虑余温的, 没余温温度怎么还会有震荡呢?这是因为这个设计的过程就是用热量去辅助计算的表示间,如果是一个温度变化,每次都在一度变化的加热器下,这是一个理想的加热曲线。 所以就算把余温加进去,最后也只是把多余热量的部分重新调整,这也是刚刚说的这个模型只是方便理解而已。因为温度是依据感测器侦测到的,不是用计算出来的。 pid 加总也只是帮你去判断什么时候加热,什么时候停止加热。
1288大仙DIY 00:30
00:30










猜你喜欢
最新视频
- 1.7万社会边角料