电机正转5s再反转5s梯形图怎么画

粉丝370获赞401
相关视频
 00:28查看AI文稿AI文稿
00:28查看AI文稿AI文稿按下 i 零点零,使 q 零点零输出。 q 零点零常开触点导通,构成自锁。 q 零点零常开触点闭合,构成互锁。按下 i 零点二断开。 按下 i 零点一,使 q 零点一输出。 q 零点一长开触点导通,构成自锁。 q 零点一长 b 触点构成互锁。按下 i 零点二断开。谨记, q 零点零和 q 零点一不可同时输出。
573术成PLC培训-王老师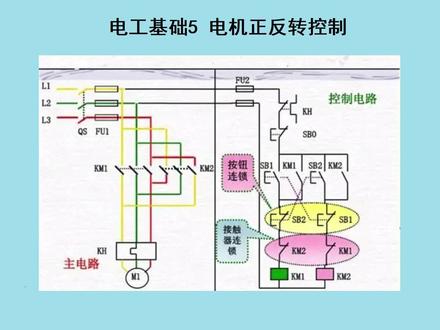 06:54查看AI文稿AI文稿
06:54查看AI文稿AI文稿我是萤火虫,用每一点微光照你的自动化之路。今天呢,咱们来一起了解一下电工技术的第五个知识点,电机正反张控制,这被其套一个互锁的概念,电机正反张控制在有些场合呢,需要 电机的反向运动,比如说继床工作台的往返运动,就要求电机呢进行可逆的运行。有电机的原理可以知道呢,三项异步电机任意两相对调,电机就可以实现反转,这样呢,就可以借助于 正反向接触器,正反向接触器改变定子绕组的相序来实现正反转工作。咱们先看主回路,柱回路三大件,端炉器,交流接触器,还有热剂。如果是 km 一 接通,然后呢,这个时候电机正转,如果想要电机反转的时候呢,需要将 km 一 主触点断开, km 二接通,这个时候呢,为什么是反转呢? km 二接通的时候,与原来的 l 一 接在了 w 上, l 二还是归 v 向 l 三呢,借在了 e o 向上,也就是说原来的 v 和 w 相系进行了调换,这个时候电机进行了反转,当然这里边呢, k m 一 和 k m 二呢,不能同时 接通,如果同时接通的时候会出现短路,同时接通,这个时候呢, r 一 通过这个路直接回到了 r 三上,两个线电压呢就短的在一起。那怎么避免呢?咱们看一下控制回路,控制回路第一个就是没有自锁的 k m 一 和 k m 两个线圈儿, 然后咱们把定对应的划下来, k m 一 k m 二这地方划错了,这应该是 k m 二。先看这个控制回路,控制回路里边儿呢? 热继电器长臂式点串在主回路里边儿,然后主回路里边有停止按钮,正转启动按钮 s b 二反转启动按钮 s b 三,按下 s b 二, k m 一 闭合,然后松开按钮是一这样弹出的一个形式,按下松开 k m 一 又自锁,这个时候电机又正转,在这种情况下呢,按下 s b 三的时候呢, k m 二也会得电自锁,两个 正反转的交界的气都都会闭合,这样就形成了短路,这么是不允许的。那怎么避免呢?咱看第二种正转,停止反转还这样一个控制回路 在 k m 一 线缺了,这个地方呢,加上一个 k m 二的长臂触点。首先呢,正转启动,正转启动的时候呢, k m 一 自锁啊,这个时候点反转的时候呢, k m 二是不能得电的,为什么呢?是因为 这个时候 k m 一 的长臂触点它是断开的,它们两个之间是有个对应关系, 它是断开的,也就是说你 k m 三无论怎么按长按,按下松开两种方式, k m 二都不会得电,所以说这个时候反转,它是不能反转的。怎么怎么能反转呢?触动停止按钮,触动停止按钮以后呢,又 整个之路呢,又挥挥不到最开始的状态,然后呢,按下反转按钮, k m 二得电子锁,想正转的时候呢,还要按下轻置按钮才能正转,它就是通过对方的正反转 长臂触点实行一个自锁,不让正反转接触器同时闭合,这是正反转控制,但它里边有一个从正转切换到反转的时候必须要停,咱们看第三种,第三种呢,正转可以直接卸载的反转在 km 一 线圈的这个地方呢,除了串联 km 二的长臂触点以外,还串联了一个反转按钮的长臂。首先呢,咱们按下正转按钮,最开始的时候 km 二 线圈是没有电的,这个时候它是长臂按下启动按钮,这个时候 k m 一 线圈得电, k m 一 自锁,电就从这样流过来,这个时候想反转的时候呢,一按钮的话,它是 按一下弹开,你按一下,再按,那一瞬间,它是一个一的一个状态,从零到一按下那个瞬间,它肯定有接受的时间,比如说一秒钟或者零点几秒,在这个接受的时间内呢,它是闭合的,同时它只要 一闭合,它的长臂触点就是断开的,它就断开的时候呢, km 一 的长臂就恢复, 这个时候呢,在它按下这个一秒或者零这几秒的时候呢, k m 二呢,是自得得电了,得电,同时呢, k m 二 闭合,同时因为那个停转钮要松开,锁变成零了,这个时候呢,它实现了一个自锁按钮呢, 按下松开,再按下,保持那几秒钟的时候,就完成了 k m 二的一个自锁,这个时候电机又开始反转,因为电流的话,电的传播速度非常快的,按下松开可能就零,略几秒, 他就他就自锁,这是反转,那正转呢?正转也是一样的,按下 s b 二,把自锁恢复掉,同时 k m e 又自锁, k m e 又自锁,他断 k m e 又自锁,这样就 实现了一个正反控制,正态正在正转或者正在反转的时候想要停止,这个时候按下停止按钮, s b 一 就可以停下来。当然这种正转反转的时候呢,都是在空载, 空载上抵运行的,如果是你的个电机负荷比较大,这个时候你正转再反转,一是有惯性正在正断时候马上反转,如果负荷比较大的话,肯定是对电机不好,这是今天的 电机正反转控制。下一节呢,咱们说一下电工基础的最后一个知识点,多点控制,多点控制,两地控制,一地控制,这下一个下一个电工基础的知识点,谢谢观看。
37工控萤火虫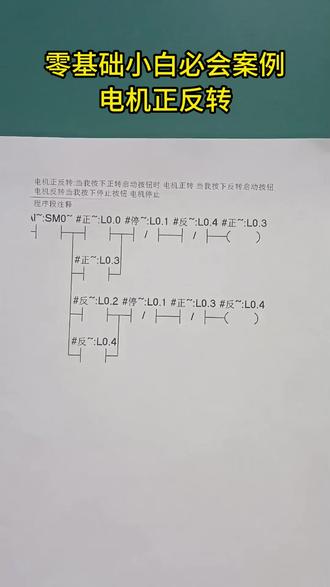 01:03查看AI文稿AI文稿
01:03查看AI文稿AI文稿今天呢给大家讲解一下咱们电机正反转的一个扩展,就是电机正反转的互锁,看咱们的梯形图啊,呃,整体呢,它是分两块,上面一块是正转的电路,下面一块呢是反转的电路,正面呢,呃,正转呢就是一个简单的起跑停启动,然后进行一个得电保持停止, 然后呢反转也是同理,只不过呢比这个普通的起跑型呢,多了一对长臂触点,分别是在正转的电路中加了一个反转的长臂触点,在反转的电路中加了一个正转的长臂触点,它的作用呢就是在咱们正转电机运行中,这个时候 直接按下反转的时候,他的这个正转长臂触点会断开,这时候直接按下这个反转是不会得电的,所以在正转时候呢,嗯,按下反转开始按钮,他是 无法进行反转的,只有按下停止之后,按下停止之后呢,他的正反转输出同时断电,将他的互锁复位,这个时候想正转或者想反转,再按下相应的启动按钮即可。
 05:25
05:25 01:20查看AI文稿AI文稿
01:20查看AI文稿AI文稿plc 的 案例讲负锁正反转,首先看一下控制要求,按下正转按钮,电机正转,按下反转按钮,电机反转,按下停止按钮,电机停止。它的 i o 分 配表, sb 一 敞开, sb 二敞开, sb 三敞闭啊,正转反转停止, 因为是正反转吗?需要两个计数器啊,我们来看一下它的程序啊,我们把它下载到电脑里面,下载 它处于运行模式啊。然后呢,我们监控一下,我们首先看一下 q 零点零,哎, q 零点零输出了, 然后我们再看一下停止啊,我们再看一下他的反转,反转也转了,然后我们再停止啊,我们停止监控,我们来看一下这个,这里面 啊要复锁,在程序上面要复锁,就是不允许两个同时启动啊,所以这里面要就是说 q 零点零启动的时候, q 零点一不能启动, q 零点一启动的时候, q 零点零不能启动,要封锁,程序上要封锁啊。
20电工技能分享 01:53查看AI文稿AI文稿
01:53查看AI文稿AI文稿一分钟教会大家异步电机的定位控制。好,我们今天讲的课题是三相异步电机实现定位控制。我们以一个案例为例啊,一辆小车只能正转和反转,正转 q 零点零前进,反转 q 零点一啊后退。好,那么同时它会有一、二、三、四、五 五个行程开关,他只能在这一条直线上面走好。那么五个行程开关每一对应都有一个按钮,一号开关,一号十一号按钮,二号开关,十二号按钮 啊,那么他的控制要求是,无论小车压在哪个行程开关里,按相应的按钮,小车跑到相应的行程开关停止。好,我们举个例子来说,小车当前 如果压在三号行程开关,也就是压在三号行程开关,那么这个时候我按十五号按钮,我按十五号按钮,小车跑到十五号停止啊,也就说无论这个小车压的是哪个行程开关,我按相应的按钮, 小车跑到相应的行程开关停止。也就是说一个三厢异步电机,他正转反转,我点哪一个位置,他就跑到哪一个位置,那么这个 这边就是他的一个程序。首先我们会有在这里有五个位置,所以这个时候我们写了有五个呼叫 啊,那么整个程序主要是要把正转的情况写清楚,反转的情况写清楚,也就说什么时候正转,也就是当我们的这个行程开关我们压下的时候啊,也就压的这个 好小于啊,我们按的按钮的这个号的时候,他实现的是正转,那么当我们压的行程开关的这个号 大于啊,大于我们所按按钮的这个号的这个,这个小车一定是反转什么到什么时候停,两个号的位置的数值相等的时候停止。好,谢谢大家啊。
42请叫我刘工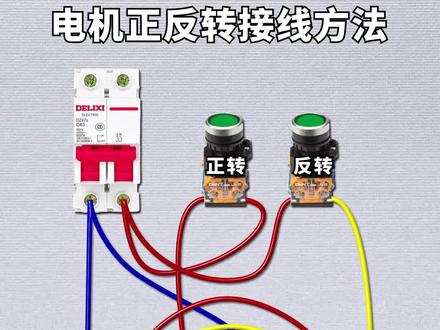 00:30查看AI文稿AI文稿
00:30查看AI文稿AI文稿接触器线圈二百二十伏,零线接到两 a 一, 火线接到两 a 二,送电,两接触器同时吸合,把两火线剪断,串联正反转启动按钮,按钮分别控制启动电机的正反转, 同时启动是不允许的,要互锁。将正转线路串进反转接触器,长臂反转启动,长臂断开,反转无法启动,这就是互锁,你学会了吗?
26欠我一顿烤肉 01:03查看AI文稿AI文稿
01:03查看AI文稿AI文稿今天我们要学习的是互锁电路,请听题,请用梯形图写出互锁电路程序,要求按下启动按钮, m 二点零,电机正转。按下 m 二点一,电机反转。按下 m 二点三,电机停止运行。给大家三秒思考时间,三二 时间到,我们来看一下答案,这就是自锁电路图的程序,我按下 m 二点零,大家看一下, 这时候电机开始正转,当我按下 m 二点一,大家看一下, 这时候电机正转,停止反转启动,当我按下停止,大家看一下, 这时候电机停止工作,这就是互锁电路,大家还有其他方法吗?欢迎在评论区讨论。
1433电气小子 00:07
00:07 02:47查看AI文稿AI文稿
02:47查看AI文稿AI文稿力五杠一 pls 完指令实现增反转应用任务要求,在所示的实验装置中, fx 三 u 杠三十二 mt poc 输出五二零, y 一 为电机的脉冲和方向 输入, x 十为启动按钮, x 幺幺为停止按钮, x 幺二为增反转切换按钮。 请使用 pls one 指令试验正反转控制。首先要完成硬件接线,图中所示为 plc 步进电动机 plc 与线路开关按钮之间的接线。需要注意的是,线位开关有 npn p n p 两种, s 杠 s 的 接线必须符合相关要求。接线完成之后进行程序设计,打开程序 步零 x 幺零 set m 零,步二 x 幺幺瑞士 m 零步四 m 零。触发的时候输出 pls one k 一 千 k 一 千 y 零。 对 pls one 制定来讲,第一个 k 一 千表示的频率数据,第二个 k 一 千表示的是脉冲量数据, 第三个五二零表示输出脉冲的未卵原件编号方向。怎么办呢?在布什奥,通过 x 幺二来切换 y 一 的方向,进在线监控, 输出一千个脉冲,停止,需要通过 x 幺幺进行。输出一千个脉冲, 通过 x 幺幺进行复位,改变方向, 反转一切脉冲,反转一切脉冲。 输出一千个脉冲, 通过 x 幺幺进行复位,改变方向, 反转一切脉冲, 反转一切秒钟。






