易舒特火控编程入门教程
再展示一下双龟背效果,单方啊,连方 龟背效果非常好啊。然后可能有的朋友比较好奇是怎么做到的? 我这个呢用的是一个艺术特的火控,然后的话你可以看到蛋糕尺这个水滴尺的位置有一点白色的这个东西,这个呢是一个 p p 六六还是什么?一个尼龙材料,我买了一块料板,然后呢我把这个尼龙的这个料板呢给它裁成了比较小的一个, 嗯,三角形的一个小东西,然后把它贴到了这个水滴石上面,然后之后呢一点点的去打磨他一点点测试,测试到他这个能够完整完成,实现归位之后,他这个效果就非常好了, 他这个就是也是一个,也是一个慢活,需要很多次的拆波打磨。来再看一下 手感其实还是很好的, 这个油刷电机如果能做到正常规律的话,手感还是非常不错的,这个超级黄屏的扭矩还是挺挺高的。

粉丝10获赞88
相关视频
 04:25查看AI文稿AI文稿
04:25查看AI文稿AI文稿火控该怎么选择?什么叫磁控?什么叫微控啊?什么叫光控?那么火控到底是做什么的?那肯定要先要了解火控的工作原理,火控是保证你的波箱内部稳定,如做到高秒的时候,你的齿轮的转动次数 有火控的最大优势,可以保证你的单发每次归位特别准,在波箱内部的齿轮也会保持相对性的稳定。那么网上常有人说火控有什么微动开关啦,磁动开关,还有光控 这一类,他们又有什么区别?在这讲之前啊,先了解一下火控的工作原理,在火控板上,通常这个位置有一个开关是扳机来拨动他,滴滴滴滴,这个就是激发激发开关,然后这里可以看到也有一个小开关,他是一个齿轮技术开关, 就是说你的蛋糕尺的下面小水滴碰住他滴,这样碰住他,火控就会感应到齿轮转了一圈,然后就会停止电击。比如在单发的时候会更准, 在连发的时候,他会每次一碰他就会计数,直到转了一圈,转了一圈,转了一圈等你,比如说你按住开关,他一齿轮一一圈一圈转动一圈,然后等你松开松开扳机的时候,你的齿轮 就会立刻停止,比如说刷新最后一圈,立刻到这就停止了,这是一个计数器,然后翻到咱们翻到另一侧啊, 这里还有一个开关,充上这个开关,他是一个快慢机开关,就是咱们的拨动快慢机,如何调整单发连发或者是保险都是靠他呃来运行的,按下去是全自动口控,他就感受到啊,该全自动了,需要一直哒哒哒哒哒哒哒,松开以后他就变成单发,就是你, 呃,抠住半截,他只会激发一下,不管你扣多久,他都只会,他都只会激发一下。然后在火控板上通常延长出来几根线啊,前面两根较细的,一根白色,一根黑色,或者其他比较容易分辨的颜色,他都是弹夹的供电线。然后接下来后面还有几根粗的线, 黑色,负极,白色,正极啊,都是比较明显能区分的线,一眼都能看出来。然后这一根黑色的,它短的里面有个端子,这个是电机负极线, 然后这是供电线,两根最长的供电线,在正极供电线下方有一个呃,正极的电机线,这就是我们大多数火供本上所有的东西。电源线,点击电源线,文具盒电源线, ok, 那么接下来讲解开 开关的区别。手里面这就是一个微动开关,他主要检测蛋糕尺下方的水滴,给大家看一下蛋糕尺下方的水滴长什么样子,可以看到吗?是这个水滴啊,他其实这样运行呢,为了给大家看一眼,这个方便一点。呃,其实就是波动,这个微动开关,火控就知道你转了一圈, 那么这是微控开关。接下来是光控肉啊,这是一款比较典型的一款光控,这是一个反射,反射光控,那么反射上下板的反射光控,他是来检测什么的? 他是来检测我们的齿轮嘟齿牙,哎,到这这就转了一圈了。单发的时候就告诉你该停,连发的时候他技术一圈啊,等你松开扳机的时候,他就瞬间停止,这就是技术的一个方式,他 火控的微动光控以及磁控,他就是技术方式的不同,这是他的一种技术方式啊, tsr pro 他是即齿牙,然后还有一种像卤蛋糖的 etu 啊,卤蛋糖最新火控,然后他是一个对射,一个对射的光控, 他也是同时也是检测水滴啊,给大家看一下齿轮水滴这个位置,比如说是他转到这里了, 相当于水滴把他俩对射的这个光感给中断,然后水滴移走那个尖尖的时候,他俩又对射,这就是他的技术方式。接下来就是磁控,磁控你像我手里面拿的是一个无名火控, 磁控他主要检测水轮上的小磁铁,同样检测方式一致,不过是他将光控或者是微动开关换成了一个霍尔传感器,专门检测有没有磁力通过。那么讲到这里讲到这么多, 五、到底选择哪款火控比较合适? 呃,那么本期视频就到这里,还有什么问题的亲们可以在评论区回复或者是私信我,看到以后我就会回复大家的。
2910王中王工坊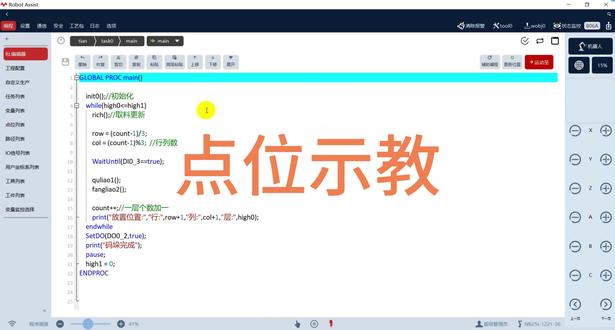 02:11查看AI文稿AI文稿
02:11查看AI文稿AI文稿大家好,欢迎来到小田课堂,呼应客户的要求,今天小田出一篇试教点位的教程视频。第一步,确定右下角操作权限,其中编程员、管理员、超级管理员都可以实现点位试教。 我以超级管理员为例,密码为一二三四五六,管理员密码为一二三四五, 编程员密码为一二三四,试教员密码为幺二三,操作员没有密码。之后我们来到编程一栏,选择点位列表,找到我们需要进行重新试教的点位。 我以取斑点为例,选中该点位,打开状态监控时机,只需观察实际机器人即可 选择我们移动机器人参考的坐标系。这里我们以弓箭坐标系为例,速度调至百分之十到百分之十五,防止速度太快发生碰撞, 给我们机器人上电,红颜色为机器人上电状态。移动机器人来到祛斑点位置, 点击点位列表左下方的更新位置,点击确定之后,更新点位就完成了。第二种方法,在程序中找到这个点位名称, 把光标落在该点位上,将机器人移动到该点位后, 点击页面右上角的更新位置,点击确定之后,更新点位就完成了。需要注意的是, 该点位所在的工具和弓箭坐标系需要与右上角的坐标系保持一致。 今天小田分享结束了,我们下期再见,记得点赞关注哦!




![[FT技术验证] 关于新的加农炮自瞄算法的演示 作品链接
https://www.simpleplanes.com/a/8BXZRl/DNA-Tank-with-New-Auto-aiming-System
喜欢的话可以给个Upvote吗,感谢你的支持
自瞄原理已经写在作品介绍了,欢迎大家学习并改进
#技术验证 #简单飞机 #SimplePlanes #FunkyTrees #自动瞄准](https://p3-pc-sign.douyinpic.com/tos-cn-p-0015/oUT8GWe6TCrIMAL7qBDQ7wMAKPBXAkekvUYGIe~tplv-dy-resize-origshort-autoq-75:330.jpeg?lk3s=138a59ce&x-expires=2089594800&x-signature=hmSpIrNpgsxlI8LKGH8W4DmxgqY%3D&from=327834062&s=PackSourceEnum_AWEME_DETAIL&se=false&sc=cover&biz_tag=pcweb_cover&l=202603231148235EDCC536131DFE9CF783)




