宇树机器人一个人怎么放进去

粉丝89获赞544
相关视频
 04:07查看AI文稿AI文稿
04:07查看AI文稿AI文稿首先打开开箱子,可以看,它是折叠在里面的,需要两个人辅助来一起啊,一个人拿住脚踝好发力,另一个人手腕这个位置头先出好,平放在地上。电池仓呢,它的电池一般都是新机器,都是在外面的, 点按加长按好,可以听到风声,它的风机声音,头部指示灯会亮,这就代表开机成功。然后手柄的开机,它的开机键在这里,充电器充电接口在这里,点按加长按好,听到两声滴滴声音就可以了, 现在等待它自检完成,自检完成后呢,它会有个提示音,就叫灵敏度模式,然后现在我们开机,用手柄来给它站立起来, 可以看到吗?好,这里有个开机流程,灵敏举阻尼和锁定站立和躺躺到站落座跟蹲到站好,我们先启动,先是切到阻尼模式,按一键 l 二加 b 吗?这里他会有个播报阻尼模式。然后呢就到锁定站立了,就是躺着或者趴着平趴的情况下, l 二加上长按点按好,他会出现这种情况,自己复位启动好,这个时候他是不能自主站立的,你要你把这个给它停下来,是有点力气感, 这时候它是站不稳的,你需要牵模式,来这里一个走跑运控,这运控就是它运动模式。 l 二加 a 键已进入走跑模式,这个时候就不需要人为的去按着它了,就可以自动同步了,因为用手柄来准备对的, 然后交互功能,基础功能都在这里,可以按照这个来按。先来个简单点的吗?胸前挥手双击外啊,我们这个手柄磨损有点严重,是外键 好,这时候交互功能和舞蹈都在这个表里面,详细的可以自己看一下,这个就略过了。然后说一下关机流程,分两种模式,一种我们常常用的蹲到站啊蹲蹲键 l 加 a 长按,它自动会蹲下 不是好,现在这个情况呢,他可能会站不稳,就会出现摔倒的情况,这个时候需要把腿部掰开一点往外扩啊,这样就是站稳的地毯会软,它会陷下去,所以手部就可以适当的给它放前面啊,就这样子,然后就可以关机了,来 转到这边电池的位置,关机也是一样的,点按加长按,但是我们还要继续演示,所以说就先不关机了。好,如何站起呢?如何站起就是蹲到站是双向的,也是一样 l 加 a 键,它会自动站起, 可以稍微扶一下,但是不要太用力去拉,已进入走跑模式,就自己站起来了,注意安全。好,说一下关机流程了啊,如果是地方比较平整或者是不摩擦这个材质的话,是可以直接 l 加 a 键 好,蹲下好手机模式提示音,点按加长按是关机啊,好,手柄也是一样,点按加长按。 装箱流程,需要一个人来辅助一下他这躺着的手臂是这样子,好手臂这样反起 拿手固的人用力提好,辅助一下,头先下啊,头先下好,用手臂折叠放进去,这边接手 好放好我们的泡沫纸,防止它肌体划伤泡沫层呢, 然后大的孔位在屁股这里,小孔是放手柄的。电池,电池电源线 好,这是装箱完成了就可以盖盖子了,这边一定要扣紧好,这就是完整的流程。
562全国机器人专业租赁 01:58查看AI文稿AI文稿
01:58查看AI文稿AI文稿就在今天,语数科技发布了 g d 零一载人变形机甲,官方定位啊,就是全球首款量产载人变形机甲,定价三百九十万,整机接近三米高,载人之后啊,整体重量呢达到了五百公斤, 支持远程控制,还专门配备了载人座舱,人坐进去呢就能直接操控。他最核心的亮点呢,就是双四足自由变形能力,他可以在双足直立行走和四足爬行两种形态之间无缝切换。创始人王星星啊亲自上场试驾,全程无 ai, 主打一个真实。 单从技术落地的角度来说呢,能把五百公斤级的载人机甲做到可控行走,稳定变形,给人呢还是有眼前一亮的感觉,还是挺震撼的。但是看完所有的演示和官方的宣传信息啊,咱们理性的分析一下,我觉得呢,这台机甲呢,目前还是有很多不成熟,有待丢坏的地方。 首先呢,既然定义为是民用的载人交通工具,机器人呢没有主动下蹲,而是需要王青青啊踩着机器人的关节上去,这在上去的过程中的安全性是难以保证的,万一脚下一滑,都有可能存在安全的风险。 其次,所有公开演示啊,都是在预设的环境下完成,全程都是平整路面,低速的行走,无人流,无障碍物的干净场景。但是在真实的场景中啊,路况就更加复杂了, 潜在的风险呢也更多。其实我们见过了很多很多机器人啊摔倒的视频,要知道这一个可是重达五百公斤,如果发生了摔倒,那可是相当的危险。还有关于锤墙的场景,可以看到它垂直的地方呢,是位于墙壁的高处,而且啊,墙壁是临时拼上去的,并没有使用水泥去固定。 如果把这个场景就定义为是极限的场景,那我觉得这个机器人的爆发力其实还是比较一般的,落地到真正的重活的真实工作场景,那能发挥的作用呢,还是比较有限的。另外啊,他民用交通工具的定位啊,目前来看还是比较牵强,先不说这个三百九十万的天价啊,完全和大众民用啊不沾边。最关键的是呢,现在的这些交通法规里面是没有任何关于载人变形机甲的上路标准的, 你不能上牌,你也不能合法的上路,根本是没有办法承担日常的通行,户外代步的这些民用功能。总的来说呀,语数 g d 零一的行业探索价值毋庸置疑。 确实,把科幻里的载人机甲呢做成了实体,也证明了国内机器人技术的落地能力,可以用来做文旅的展示,科普的体验,特种场景的试用,这些都没问题。当然,就现在来看的话呢,它终究还是一台表演属性大于实用属性的科技展品,距离真正的成熟可用可普及的民用载人机甲,还有很长很长的优化迭代之路。
4791两把刷子2077 02:15查看AI文稿AI文稿
02:15查看AI文稿AI文稿今天我们来开一个特别牛逼的东西,第一次拆人形机器人 啊,哇,完全推不动啊,完全推不动,然后我们成功把它给拿出来了,真的是费了很大劲啊,怎么开呢? 这个包装相当的严实啊,这有两扣, 哎哎咦哎哦哇,看一下啊,这个里面是一本那个阿姨的小册子哇,它这个里面全都是阿姨身上的贴纸,你可以像那种, 呃,就是高达的那个贴纸,要把它贴到这个阿姨的身上,就是你的等身高的啊,这不是等身,这一米二左右吧。哇,真的很酷哎,然后这个是什么呢?哇,这个好重啊,这非常重,是铁的, 然后这个就是我们的机器人粉体啦,哎,我要怎么把它拿出来呢?哇,两块护膝有点难吧,看一下。哇,超酷,很重啊,很重,弹出来吧,放心哦。哎呀 哎呀,对不起,他这个脚怎么在这,是不是卡住了呀?这是泡沫都已经。哇,我的天呐天呐,你们现在不是在从事什么非法购帐吗? 哈哈哈哈,不行,他这样太搞笑了,他这这这样,他这个应该是拉回 唉唉, 锁定战力。好的,三二一,已进入长途模式,请注意安全哇,已进入走跑模式,请控制速度,注意安全。好,大家想看我用这个技能整什么活呢,可以在评论区告诉我。
498842号电波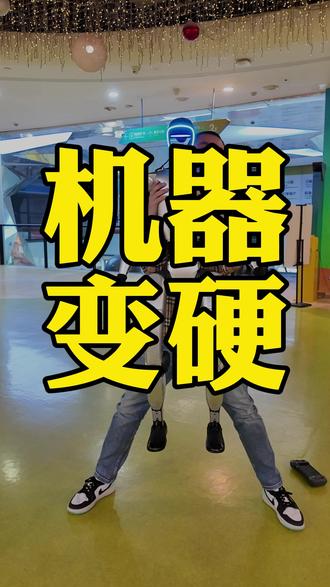 01:32查看AI文稿AI文稿
01:32查看AI文稿AI文稿机器人他是有七十斤的啊,机器人在这种走跑模式下是不能够往上提的,只要他的双脚一离地,他没有着力点,他的脚就会乱踢,会伤到人。 那如果你像我们出去做活动的时候,我们想把机器人往上搬或者往上抬怎么办?让机器人变硬。变硬其实也很简单呐,直接 l 二加左键, 他会软一下,然后 l 二加上键。听到他进入预备模式以后,我这个时候我这么去搬啊,这个机器人他是有七十斤的啊,一般舞台他是有高度的,我这么就可以搬上去,无论他是这样倒下, 他整个机器人是硬的,包括他起来再让他这么躺下,都不用去担心他啊。 如果你没有进入变异模式,你直接去提这个机器人,你把他腾空了以后,他这个双脚会一直乱踢。你看这个抖音上的机器人踢人的视频, 其实就是他们没有让机器人变异,故意把他腾空以后他机器人脚就乱踢,会伤到周围的人啊,我办的都有点气喘吁吁, 你想一下女孩子他搬都搬不动,再加上箱子一百斤,舞台大概都有五十公分六十公分高,机器人目前说实话他是没有办法直接能够走上去的,因为语数官方没开远,更多的时候都是我们这种工作人员给他搬上去的。搞机器人 安全第一,你不要觉得你这个动作多么花里胡哨,首先你要确保你的机器人走出去不伤人,安全,而且自己的机器人还不摔,稳健哦。
11艾林说 01:00查看AI文稿AI文稿
01:00查看AI文稿AI文稿人形机器人已经在美国上门做家务了,不是实验室摆拍,而是真干活。最近,就金山一家叫 gatsby 的 机器人应用公司把这件事正式跑通了。打开 app 预约一台语数机机器人直接来你家干活。从早上八点多干到快十二点,三个小时里,他会擦地、整理床铺、洗碗、收 收拾桌子、拖地板、叠衣服,干完活再自己离开,全程零个人类插手。你下班回家,看到的是一个已经被整理好的房子,最狠的是价格一次固定一百五十美元,换算下来差不多一千零一十七元人民币。哪怕你家是上下三层的大平层,也是一口价 一千零一十七块。而旧金山当地人工保洁普遍要一百五十到三百美元。也就是说,人形机器人第一次开始在真实商业场景里跟人类比性价比了。现在很多公司都想卖你一台十几万的人形机器人,但该次币直接换了个思路, 你根本不用买。它更像机器人借的滴滴,需要干活时预约,不需要的时候它就离开。因为绝大多数家庭并不想养一个机器人,他们真正想买的,其实只是有人替我干活。上周,它已经实打实清洁了十四套公寓,旧金山已经约满其他城市排队中。说实话,谁不想要一个回家只有干净没有家务的周末呢?
1697圆周机器人 02:08查看AI文稿AI文稿
02:08查看AI文稿AI文稿语速与 word 这个机器人想要让他关机有很多的方式,第一种方式就是扶着后面的把手, l 二加左键他会转一下, l 二加上键他会发出预备模式,这个时候我就可以直接让他趴下,趴下以后再按一下主笔 模式都可以直接关机了。为什么建议用这种方式呢?用过机器人都知道,我们机器人使用完以后要装箱的时候,是需要两个人抬的时候,最方便的便捷的方式就是这样直接往箱子里面抬,这是第一种方式啊。还有一种就是在机器人站立,我们直接 l r 加 a 键 让他蹲下, 等他完全蹲完以后,机器人会发出阻力模式, 进入主力模式以后,就可以在这直接长按去关机,这个适用于我们出去搞活动,搞表演的时候,中途休息不用装箱,我们就用这种蹲着姿势,对气是一个保护,但是这里面蹲着他也有一个难题,就是我们的电池需要充电的时候,他往外不好拔插, 因为这个手的这个关节和这个电池这里容易卡住,所以说蹲下一般都是不需要补电的情况下, 用这样的形式关机完了以后他就是这样一个蹲姿,关机的话怎么去操作呢?依然是扶着这个机器人后面的把手,然后 l 二加主键他会明显软一下,再立马 l 二加上键,进入预备模式以后,直接让这个机器人这样躺下, 躺下以后 l 二加 b 键阻离,进入阻离以后,这个时候我要去拆卸电池的情况下,假设按关机键,我是不是很容易把它 拔出来,因为语速这个机器人他这个电池还是比较重的,尤其是他这个电池卡扣他是比较紧的,所以说最好的方式就是把这个手臂自然而然的给他往上抬,把电池抠出来。这就是 三种,一种是让他趴下关机,一种是让他蹲下关机,还有一种是让他躺着关机。
12艾林说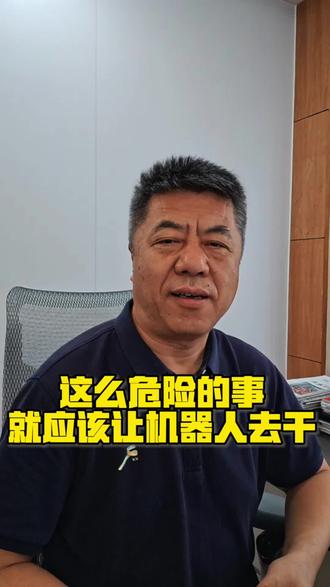 01:54查看AI文稿AI文稿
01:54查看AI文稿AI文稿刚刚刷到一个视频啊,是我们这个语数的机器人落户到中国华电去,在那里关电闸,网友们都在那蹲着,看他什么时候能关上。大家都知道啊,关电闸是一个非常危险的动作,以前如果是靠人的话,经常就会出现危险。 前两天在读者上还读到了一个小故事,说有一个人,他爸爸是村里第一个考出去的大学生, 结果毕业回来了,第一天上班就遇上了下大雨断电了,那村里人都说,那大学生你得去管管这事,去把电闸给修上了, 没办法他父亲就去了,因为是第一次上岗,也没有师傅带,所以不幸触电身亡。在生活中也有这样的故事啊,我一个朋友前两天跟我讲过,他也说啊,他们是在厂子里边,那是应该是上世纪八十年代了吧。 也是有一天好像电出了问题,他和另一个兄弟就想上去弄,结果那哥们先上去了,手一碰啪 就给电伤了,留下了终身的伤痕。现在好了,有这个语速机器人啊,这些危险的地方就有机器人挨杀,这也是机器人发明的一个重要的赛道,就是替我们这些肉身去冲到那些最危险的,比如说火灾、 地震、洪水,有电有生物伤害的地方去完成这些任务,替我们去 阻挡伤害,迎来这个安全的环境,这也是机器人做的贡献吧。但是我看到网友在那里留言啊,就是机器人在那一跺脚,一跺脚,机器人也在害怕,他也在害怕自己的身体受到伤害。
31剑走偏锋的老王 03:47查看AI文稿AI文稿
03:47查看AI文稿AI文稿开箱扣子打开摘开就可以了,只有一个杠子,先拿出来,你把遥控器遥控器先拿出来,然后脚先抬出来,把这个垫片泡沫垫给拿出来, 然后先出脚出两个人合力就可以给它搞出来了。开机也是点按加长按, 听到风机运转声音就是启动成功。这遥控器遥控器也是点按加长按 力举模式,开机完成按那个阻力模式 l 二加 b 阻力模式,它会自己播报阻力模式,然后再锁定站立 l 二加上,也会自己变成预备模式,然后再给它抬起来就可以了, 然后再用运控模式 r 二加 a。 这边有写的 r 二加 a 走跑运控,已进入走跑模式,请控制速度,注意安全。 躺下的话这边有一个操作按钮,三就是 l 二加叉 阻尼模式,然后在那个自适应起身,嗯,先给他阻尼模式 l 二加 b 阻尼模式,然后再给他锁定站立 l 二加上,我想要自己起身,就是按这个躺跟站 l 二加叉 长按,已进入常规运动模式,请注意安全。已进入走狗模式,请控制速度,注意安全。你可以简单的挥手,挥手,他这边就是胸前挥手,有个双击外,可以按一下 飞个吻,双击叉,这个比较基础的一个动作。好,接下来可以给大家看一下舞蹈,就稍微空旷一点。好,现在就左跑运空的状态,可以直接跳舞,就是可以跳个扭扭舞。二二加左 l 二加叉,然后也是躺下 阻尼模式。对,先给它关机就行了,短按加点按加长按就行。 ok, 手柄也是点按加长按好,那就装箱 头伸进去,然后再进腿盖板先垫一下,手的话要给它拿出来, 然后腿腿的话要转一下,泡沫垫片可以放脸上,然后防止刮刮花了。对,要腿要稍微转一下,然后腿往里收紧就 ok 了。 然后充电器啥的手柄放这,充电器放这,然后就可以盖上了。
 01:54查看AI文稿AI文稿
01:54查看AI文稿AI文稿啊,今天我们来讲解一下啊,如果机器人啊,遇到这种有有这个高杆的这玩意,然后遇到那种报上舞台表演节目的时候啊,我们应该怎么将这个机器人 送到舞台上啊?我们一般不采用这个啊,走楼梯的那种模式啊,那种也有点危险, 然后也不太感觉,也不太油,就是说不太美观啊,我们正常是把它抱上去啊,既方便又美观啊,我们应该怎么抱怎么抱呢啊,一共有两种方法啊,第一种 是使机器人蹲下,然后我们抱着他过去啊,蹲下是怎么蹲的? l 二加 a 啊,长按设备下蹲中啊,他下蹲之后,他下蹲之后啊,我们就可以抱着他啊,抱过去阻尼模式啊, 然后抱过去,然后如果要是他抱过去进去的时候,然后我们放好,然后再 l 二加 a, 设备正在就站起来,可以了啊, 还有一种方式啊,是我们经常用的这个,这个蹲下的话也感觉呃有点费力啊,我们再换一个直立的,直立的啊,然后就是先 l 加左长按,然后再 l 加上, 这样就可以直接抱着进去了啊,这样非常的简洁轻快,然后又美观啊,好,就这样抱着进去啊,抱着进去之后,然后再 r r 加进去做动作,我们一般遇到这种情况,然后再加上抱上舞台,就是这样搞好结束。
15凌晨说晚安 01:21查看AI文稿AI文稿
01:21查看AI文稿AI文稿就在刚刚,语速发布了一个大招,让我这一次对语速感觉到非常的陌生,我们现在向后转身,然后双手叉腰,扭下屁股再转回来, 收到动作如下, 语速一直以来是运控能力很强的一个机器人,适合商演跳舞表演,但是没有语言大模型,缺乏的就是交互能力。但是这一次语速发布的这个大招,展示的不仅仅是他拥有的一个语言交互能力,而是通过语言还能够去理解指令, 做出相应的动作,而且是同时多个指令。那笨笨同学,我们要上难度喽,现在试一下半蹲着向前走几步,再退回原点。 好的,准备开始,先半蹲着向前走几步,再退回到原地, 这表现的语速也开始重视人机交互,未来语速机器人不仅仅是在商研上面,或许在展厅导览、文旅讲解这些方面也会有精彩的一面。
 00:29查看AI文稿AI文稿
00:29查看AI文稿AI文稿你敢信吗?吕叔刚刚发布了一个载人变形机甲,这不是电影道具,而是全球首款量产版载人机甲! g d。 一 王星星直接亲自坐进去测试,站起来,他能像人一样直立行走,挥挥手就能轻松摧毁一面墙,趴下来又能变成四足猛兽。更夸张的是, 这台机器载人后重量约五百公斤,售价三百九十万元起。它的价值不是让你开着去上班,而是把载人变形、行走、平衡控制全塞进了一台真实机器里。这也是人类第一次把科幻里的机甲真正做到了现实世界里。
302机器人快讯 02:11查看AI文稿AI文稿
02:11查看AI文稿AI文稿全网首发语数最新款二一人形机器人开箱 遥控器,和语数以往的遥控器是一样的,上手零难度,但是电池比记忆小了很多, 自主躺下, 自主站立,动作丝滑不卡顿。 和 u b 选全尺寸机器人站在一起,一个高大威猛,一个小巧灵活。
 03:36查看AI文稿AI文稿
03:36查看AI文稿AI文稿朋友们提取语数科技,很多人第一反应还停留在春晚那些非常炫酷的舞蹈上,但是就在昨天,语数科技公布了一段人形机器人整理杂乱会议室的最新测试视频, 看过之前节目的朋友应该记得我们在聊资源机器人的时候呢,给大家科普了一下什么是机器人的小脑。那么今天啊,我们就借着语数的这一段最新的测试视频,我们来重点拆解一下机器人的大脑,看看他是怎么思考和干活的,以及在实际应用中还需要解决哪些问题。首先啊,我们先来看看这台机器人在视频中具体完成了哪些事情, 在一经到笔的视频中呢,他一共连贯的完成了六项任务,第一项任务呢是将记号笔归位,可以看到过程中啊,机器人准备去抓取记号笔,那在此时呢,工作人员啊临时的把笔拿起来,在手上把玩了一下,再放回了桌面的其他位置,机 器人呢依旧可以准确的去抓取,到最后呢,走到了笔筒的前面,精准将笔呢放置到了笔筒里面去。第二项任务呢是调整遥控器的位置,机器人在抓取的时候呢,哎,工作人员又使坏了, 把机器人呢往后拉了几步,机器人依旧保持平衡回到原来的位置,并且把遥控器拿起来,正确的放回了电视机一侧的桌边。第三项任务呢是将废纸扔到垃圾桶里,工作人员又使坏了,不仅是在捡起垃圾前去拖拽了一下机器人,并且在机器人去扔垃圾的时候,又把垃圾桶啊往后拉了一下,机器人呢没有直接扔垃圾,而是呢又往前走了几步,最后啊,准确的把垃圾呢扔到了垃圾桶里。 第四项任务呢,是将喝了一半的矿泉水瓶啊扔到垃圾桶里,再从一箱矿泉水中找出一瓶新的放到了桌面上。那这个过程中呢,虽然工作人员没有去使坏,但是因为矿泉水瓶有的轻有的重,其实是比较考验对于物体抓取的力度控制的。 第五项呢,是把分开的宣传册啊合并在一起。这项任务啊,其实完成的一般般,可以看到他并没有很好的把宣传册合并在一起,而且在使用夹角的时候呢,按在了封面上,可能啊会把宣传册压出痕迹。 最后一项任务呢,比较简单,就是把椅子归位,机器人双手推着那个椅背,慢慢的把这个椅子推到了桌子下面就可以了。那么他凭什么能做到这么多任务的自主运行和抗干扰呢?核心就在于软硬件相互配合的这个大脑上。咱们先说说软件层面,他的核心大脑是 w l a 二点零大模型, 结合视频中展示的是是运行代码,咱们要逐行去扒一下日制,会发现这是他真自主非遥操的有利证据。第一呢是多视角的视觉数据,立体的理解物理空间。 第二是高速的感知决策闭环,机器人获取一次环境观察只需要不到十毫秒,而完成一次策略的推理稳定在九十毫秒左右。 第三呢是精细的动作下发,推理完成以后呢,服务端会立刻将四肢的具体动作参数回传执行,总的来说呀,这个大脑可以一秒钟思考十次的高频运转,这种高频多视角的实时推演,能让他在别人捣乱的时候啊,瞬间反应过来。再来说说硬件层面啊,大脑的高速运行呢,离不开感知和计算,硬件刚刚提到的那四路摄像头就是他的眼睛, 而在计算模块呢,大家可以看机器人背着的那个显眼的小书包,这个小书包啊就是他的大脑算力硬件平台,用来弥补本体算力的不足。不过虽然这一次借助验证展示了世界模型的可能性,但从细节中呢,我们也能看到他距离实际落地啊,还有不少的差距。第一呢是感知盲区和空间边界感不足导致的碰撞, 虽然有四路摄像头,但是呢主要集中在视觉的焦点区域,缺乏对全身物理边界的精准把控。后方呢也有盲区,仔细看视频可以看到他去找笔筒的时候呢,身体啊不小心磕碰了一下桌角,行走过程中呢,脚尖踢到了椅子腿,机器人在往后退的时候呢,也直接撞到了墙壁, 在真实的复杂环境中呢,这还是有点危险的。第二呢,机器人本身啊,运行噪音过大,走动的时候机械脚步声偏大,如果是在家里或者是办公室长期运行,高分贝噪音会严重的优化。第三呢是动作声音效率依旧偏低, 干活呢相对偏慢,主要呢是受限于当前大模型的参数量还不够大,理解复杂的事情呢,需要慢慢的消化。同时呢,端侧的芯片的算力呢还比较有限,也拖慢了执行的速度。总结来说,语速的这段自制视频证明了 ai 正在逐步具备理解和操作真实物理系列的能力,但是呢,算力的增长,全身感知的完善,以及降噪提速、功耗、续航的平衡呢?这需要一个长期的工程点带。 那么最后问问大家啊,当人机机器人要真正的走进千家万户的时候,你最想让他帮你去干什么活呢?欢迎在评论区留言,我们下期视频再见!
33两把刷子2077 00:58查看AI文稿AI文稿
00:58查看AI文稿AI文稿你敢信一句话就能让机器人对你单膝下跪求婚吗?这是语数刚发布的最新演示视频,无需遥控器,无需提前训练,你只需要开口说一句话,机器人就能按照你的要求实时生成动作。比如你说原地起跳,然后做一个平板支撑,下一秒他竟然真的会先跳起来,再立刻趴下完成支撑动作。更离谱的是, 像双手叉腰、背过身并扭屁股这种复杂又抽象的连续指令,他居然也能快速理解并执行。以前的机器人更像是在播放提前写好的动作脚本。但现在的语速已经开始让机器人听懂人话了, 因为这背后不只是运动控制强,更关键的是,他已经具备了语音理解加实时决策加动作生成的自主能力。你说一句,他思考一下,然后自己决定该怎么完成。而且别忘了,语速之前还发布过巨型机甲,如果未来把这种语音自主控制真正结合到机甲身上, 你有没有觉得,人类距离游戏里那种铁狱式机器人好像越来越近了?未来机器人会不会真发展成那种形态呢?评论区聊聊,关注我,获取最新机器人快报!
34机器人快报 01:36AI机甲来了,60万美元能买 60万美元能买到的真机甲!宇树GD01可载人行走、秒变四足爬行、一脚踹碎砖墙,中国把科幻片搬进了现实。#宇树科技 #人形机甲 #AI机器人 #中国黑科技 #AI发展有多快查看AI文稿AI文稿
01:36AI机甲来了,60万美元能买 60万美元能买到的真机甲!宇树GD01可载人行走、秒变四足爬行、一脚踹碎砖墙,中国把科幻片搬进了现实。#宇树科技 #人形机甲 #AI机器人 #中国黑科技 #AI发展有多快查看AI文稿AI文稿一个二点七米高的钢铁巨人,能走路、能打碎砖墙,还能变形爬行,这不是好莱坞电影,这是中国人能买到真机甲! 宇硕科技刚发布了 g d 零一全球首款量产级人形机甲,售价约六十万美元。过去,人形机器人只能在实验室里缓慢行走,碰几下就倒。 现在 jd 零一能载着人直立行走,脚步稳得惊人,然后一脚踹碎砖墙。更厉害的是,他能在几秒内把双腿折叠成四足爬行姿态,驾驶员躺着操控,直接翻越不平整地面。 这个机器人背后有硬核技术,他能动态调整重心,完成形态切换。这不是小工程难题。 语数,用高强度合金做外壳,适应民用运输场景,成本只有美国同类机器人的五分之一。原因很简单,中国有全球最完整的工业供应链,从电机、减速器到传感器,全部国产。 去年语数出货五千五百台人形机器人,而美国同行每家只卖一百五十台。气地零一虽然目前还做不了精细家务,但能载人、能破坏墙体,能越过障碍, 这是人形机器人从工具变成移动平台的关键一步。语数基地零一不是什么实验室概念机,是真能买到的钢铁巨人, 以前人形机器人只能看,现在能载着你走。六十万美元来换一个能踹碎砖墙,秒变四足爬行的机甲,你愿意买吗?
26AI趋势解码 01:37查看AI文稿AI文稿
01:37查看AI文稿AI文稿你认识他吗?人形机器人最近又火了,伴随着即将上市的公司一起进入大家的视野,人形机器人,很多人还没搞懂是怎么回事,今天我们就来扒一扒人形机器人。很多人觉得人形机器人离生活很远,但简单来说,他就是长得像人,又能像人一样干活的智能机器, 能走路拿东西,在工厂干活,在家里干活,背后是 ai 大 模型加精密机械加传感器的组合。 那一台完整的人形机器人主要由三大核心部分组成,第一,硬件躯干相当于人类的骨骼肌肉,核心是电机减速带,关节轴承,决定了机器人能不能灵活的抬手走路发力,这也是目前技术壁垒最高、市场需求最大的零部件。 第二,感应系统,相当于人的眼睛、耳朵、皮肤,依靠摄像头、雷达、各种传感器,让机器人看见障碍物,感知距离,识别物体,知道自己身处什么环境。 第三,大脑算法,也就是智能加 ai 大 模型,这是它的灵魂。传统机器人靠提前编好的程序干活,而人性机器人能够结合 ai 自主学习,自主决策,遇到其突发情况,不用人为操作,自己就能调整动作。今天给大家简单分解了一下人情机器人的核心部分, 机器人从展品变成了批量销售,有真实订单的商品,再加上企业加码量产,整个赛道从概念走向落地。 赛道虽然在崛起,但大家一定要先懂常识,理性看待,理性参与。
 01:14查看AI文稿AI文稿
01:14查看AI文稿AI文稿这条视频拍一下语速机器人的几个打招呼的动作啊,我们双击 y 键是向上挥手,双击 x 键是飞吻, 双击 b 键是看手,双击这个 a 键他是鼓掌,这副体加 a 他是握手。去做活动的时候,语速机器人他常用的几个打招呼的动作,其实这个动作就足够了,但是这里面有一个核心的点,机器人在打招呼的时候,尤其是现在语速 他升级了以后,在这个手捧模式下,偏偏倒倒比较晃,这个时候要按 r 一 加 y 键,常规用户里面去,他就会很稳。搞机器人,搞福利,搞活动,挣不挣钱是其次, 安全是第一,宁可伤到自己,也不要伤到周边的小孩或者周边的游客。来嘛,你们看一下这个机器人好不好搞,你们呢? 这就是前两天在南宁做活动,我为了去保护那个小孩,那个小孩子他不以为这个机器人会咋地啊,他自己要往这凑要拉呀,我不可能伤到这个小孩,我只能伤到我自己啊。所以说机器人这个东西你还是要注意安全,安全是第一。
34艾林说 00:33查看AI文稿AI文稿
00:33查看AI文稿AI文稿语数发布载人机甲了,让我们来看看在这华丽炫酷的外表里都有哪些强大的功能,可搬运数吨重物,解放工人双手。强大的动力使得机甲轻松跨越各种障碍, 害怕小孩回家不安全,宇智机甲给予你最安心的护航,妈妈再也不用担心我一个人回家被困住了!不要慌,看我金刚铁拳前来相救!这样一台安心又实用的机甲,你会用它干什么?
2155赛博杰克AIGC

猜你喜欢
- 1.5万多喝凉白开